
Abstract
Synchronising our actions with external events is a task we perform without apparent effort. Its foundation relies on accurate temporal control that is widely accepted to take one of two different modes of implementation: explicit timing for discrete actions and implicit timing for smooth continuous movements. Here we assess synchronisation performance for different types of action and test the degree to which each action supports corrective updating following changes in the environment. Participants performed three different finger actions in time with an auditory pacing stimulus allowing us to assess synchronisation performance. Presenting a single perturbation to the otherwise regular metronome allowed us to examine corrections supported by movements varying in their mode of timing implementation. We find that discrete actions are less variable and support faster error correction. As such, discrete actions may be preferred when engaging in time-critical adaptive behaviour with people and objects in a dynamic environment.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Making discrete, repetitive movements in time with external events is a relatively simple task to perform; tapping your foot in time with a song comes naturally, while behaviours such as two people synchronising their step when walking (Zivotofsky and Hausdorff 2007) or a group of people synchronising their applause (Neda et al. 2000) are noted as common occurrences. Different types of action can be implemented in different ways. For example, when walking, we tend to swing our arms in a smooth, continuous motion. However, a marching soldier required to remain in synchrony with comrades or the beat of a drum will perform arm movements that are no longer smooth and continuous, instead executing a discrete action in which the arms are momentarily held at the extremes. Here we consider whether accurate synchronisation depends on the discrete nature of the movement or whether smooth, continuous actions can be synchronised with an external event sequence just as well.
Timing continuous, smooth oscillatory actions, such as leg movements during cycling, is believed to be an emergent property of the produced movement (Turvey 1977); in contrast discrete, event-based action, such as tapping to a beat, requires explicit temporal control (Zelaznik et al. 2002). There are good reasons to posit a distinction between continuous and discrete classes of movement control. Their evolutionary development (Marder 2000) and computational implementation are likely different and behavioural evidence suggests a dissociation in the mechanisms responsible for discrete and continuous actions (Zelaznik et al. 2002; Robertson et al. 1999; Spencer et al. 2003). Further, their neural implementation appears distinct (Schaal et al. 2004; Spencer et al. 2007) and patients with cerebellar damage show selective deficits in timing discrete movements (Spencer et al. 2003).
Previous studies have contrasted discrete and continuous actions using a movement synchronisation task in which participants initially respond with an auditory pacing stimulus (synchronisation phase) and subsequently continue moving when the auditory metronome is turned off (continuation phase) (Stevens 1886). Work to date has contrasted different classes of action for the timing of unpaced responses (Zelaznik et al. 2002; Spencer et al. 2003; Robertson et al. 1999) but has not considered the relative efficacy of different action types when synchronising with external events. Here we study synchronisation variability associated with discrete and continuous action types. Further, we use a phase perturbation paradigm (Repp 2000, 2002a, b) to examine the utility of both action types in supporting adaptive behavioural adjustments in response to unpredictable changes in metronome phase. We find that discrete movements allow more reliable synchronisation and faster error correction, suggesting a greater utility for discrete actions when engaged in ongoing interactions with dynamic events and objects in our environment.
Methods
Participants and equipment set-up
Participants ten male, two female; mean age 33.8 years (SD 9.4 years); two lefthanders rested the index finger of their dominant hand on top of a force transducer. An auditory metronome was delivered by a loudspeaker. Stimulus presentation and movement recordings used a National Instruments data acquisition card (DAQ) controlled by the MatTAP toolbox (Elliott et al. 2008) within MATLAB (The Mathworks Inc, MA, USA). The auditory waveform sent to the loudspeaker was fed back into the DAQ, enabling sub-millisecond measurement of the timing difference between the metronome pulse and the corresponding participant response. Participants closed their eyes and listened to white noise presented over headphones. This suppressed external distractions (other than the clearly audible metronome) and attenuated the visual and auditory feedback from the tapping action since this was absent in the case of the other two actions.
Procedure
Participants made one of three different actions in synchrony with the metronome that provided a beat every 500 ms. Leading from the wrist, participants controlled the index finger of their dominant hand to make (1) a discrete (isotonic) tapping movement, (2) a continuous (near isometric) action in which the finger remained on the sensor and applied force was varied sinusoidally or (3) a pulsed (near isometric) action intermediate between these extremes in which force was applied in an abrupt fashion (Fig. 1a). This latter movement was included as it has discrete properties (sudden force onset), but shares control characteristics in requiring a variation of applied force, rather than changes in effector position. Thus, we aimed to separate the mode of control (i.e. isotonic movement vs. isometric force) from the type of action (i.e. discrete vs. continuous) produced.

a Illustration of the three movement types accompanied by force-time plots typical for each action. In each case the participant was encouraged to use the wrist to lead the action. Continuous. The action required a smooth, continuous application and release of downward force on the transducer surface, such that the force profile would be sinusoidal with peak force coincident with the metronome tone. The finger remained in contact with the surface at all times. Pulsed. The action required an abrupt, pulsed application and release of downward force on the transducer surface coincident with the metronome tone. The finger remained in contact with the force transducer at all times, resulting in a force profile that looked like a smoothed spike. Tapping. The movement was a discrete tap on the transducer surface coincident with the metronome tone. b Movement onsets are extracted from the force data and compared to the metronome onsets. The metronome is subjected to a phase shift (Δϕ) at tone T. Producing this phase shift was achieved by either adding time to the interval (as illustrated) or shortening the interval (not depicted). The inter-response interval (IRI) is determined by the time between successive movement onsets, while the temporal difference between the tone onset and the participant’s movement onset is quantified by the asynchrony (A). As illustrated, and consistent with previous studies, participants’ movement onsets tended to precede the metronome
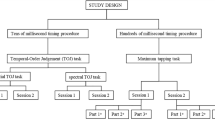
At the start of the session, participants were given two or three practice trials for each action before starting the main experiment. Each trial consisted of 30 metronome tones (the “synchronisation phase”: inter-stimulus interval 500 ms; tone duration 100 ms; tone frequency 800 Hz) followed by 5-s of silence during which participants were required to continue moving at the same rate (the continuation phase). Data collection was split over two sessions performed on separate days. Session 1 involved 33 trials (11 for each action type) split into four blocks. The first block had two trials for each action (total of six) and assisted participants’ familiarisation with the task; as such phase perturbations were not used. Blocks 2–4 contained nine trials each (three repetitions of each action type) during which the auditory metronome was entirely regular except for a single phase perturbation (shift in the phase of the metronome by a fixed value of ±50 ms) inserted at a random point between metronome beat 10 and 20 (Fig. 1b). Participants were given several minutes rest between blocks. Session 2 was identical to Session 1 but without Block 1. The order in which actions were performed was randomised across sessions and participants.
Data processing
Action onsets were determined using an automated algorithm that identified the time at which the peak force was asserted in the executed movement. Measurement of these peak force events introduced the lowest amount of measurement noise when compared to other possible landmarks in the response data (e.g. minimum force, maximum rate of change of force or percentage of peak force amplitude).
To quantify the reliability with which participants made each type of action, we examined the regularity of interval production by computing the standard deviation of the intervals between successive applications of force—i.e. the inter-response interval (IRI, Fig. 1b). Synchronisation performance was quantified by determining the asynchrony between the onset of the metronome pulse and the participant’s action. The accuracy of synchronisation was calculated from the standard deviations of the asynchrony measurement, while to assess recovery following a phase perturbation, we calculated the relative asynchrony for each trial. Relative asynchrony was defined as the change in asynchrony following the perturbation of the metronome where the baseline asynchrony was provided by the mean of the five measured asynchronies immediately preceding the point at which the perturbation was applied. For instance, an asynchrony difference of 10 ms would result if the measured asynchrony was 70 ms following the phase perturbation, where asynchronies had an average of 60 ms on the preceding five taps. The recovery rate following a phase shift was calculated by fitting an exponential curve to each individual subject’s mean data for each action type and phase shift direction (i.e. shortening or lengthening of the interval). The exponential curve took the form:
where, b 0 is the y-axis intercept, b 1 is the difference between the asymptote and the y-intercept and l is the logarithm of the rate constant (Pinheiro and Bates 2007). Rearranging the equation enabled us to determine the time, t, when the curve returned to baseline (defined to be within ±15 ms from zero relative asynchrony to allow for analysis of some trials where participants under-corrected slightly and hence did not re-attain a zero relative asynchrony). A linear regression of return-to-baseline time on mean-squared yank (msy) was calculated to determine if the ‘discreteness’ of a movement and the recovery time from the phase perturbations were systematically related. msy was defined as:
where F is the measured force and t is time.
We observed no significant differences between positive and negative phase shifts [F(1, 9) = 0.139, P = 0.718] in any analyses performed, so data are presented by pooling the (appropriately inverted) data. Statistical analyses used repeated-measures ANOVAs with planned contrasts. Sphericity corrections were not required. All statistical tests were conducted using SPSS (v16.0; SPSS Inc, IL, USA).
Results
We hypothesised that synchronising continuous actions with an external event would be more difficult than discrete actions due to the lack of a clear initiation/termination structure. As such, we expected least variability for the tapping movements and most for the continuous actions. Analysis of the asynchronies revealed that the type of action had a significant effect on synchronisation variability [Fig. 2a; F(2, 18) = 5.452, P = 0.014], with the continuous action significantly more variable than tapping movements [F(1, 9) = 6.468, P = 0.032] while no difference was found between the pulsed and tapping actions [F(1, 9) = 0.74, P = 0.792]. This effect was not limited to synchronisation with a metronome. Participants continued to move rhythmically after the metronome had been turned off, and we observed the same pattern of results based on internal timing control: tapping movements had significantly lower variability than the continuous action [F(1, 9) = 6.155, P = 0.035] but not the discrete pulsed action [F(1, 9) = 2.411, P = 0.155]. Thus discrete movements appear more reliable, both under conditions traditionally used to study event-driven timing (e.g. see Repp 2005; Aschersleben 2002) and under conditions used to study emergent timing control (Robertson et al. 1999; Zelaznik et al. 2002, 2005).

a Variability of asynchrony (dark grey) and inter-response intervals (light grey). Mean standard deviation of asynchrony and IRI was calculated for each movement type when the metronome was present (synchronisation phase). Error bars represent standard error of the mean. b Relative asynchrony between the movement onset and the metronome onset for the three different movement types. Onset T corresponds to the occurrence of the phase perturbation. Zero relative asynchrony is defined as the mean asynchrony between time points T-3 and T-1. Data points represent the between subjects means. Error bars represent 95% confidence intervals of the mean. c Post-perturbation recovery time for the three movement types. Data represent the between subjects mean recovery time determined by fitting an exponential function to the relative asynchrony between T and T+8. d Correlation between ‘discreteness’ of movement and perturbation recovery times. The level of discreteness, averaged from individual participant responses for pulsed (triangle markers) and continuous movements (diamond markers) was quantified using mean-squared yank. This was plotted against the return to baseline times following a phase perturbation. A linear regression line was fit to the resulting plot
In addition to the analysis of asynchrony, we also examined inter-response interval (IRI) variability during the synchronisation phase (Fig. 2a). We found a significant difference between IRI variability and asynchrony variability [F(1, 9) = 14.203, P = 0.004], in particular inter-response interval variability was higher than asynchrony variability. The pattern of IRI variability differences between movement conditions mirrored those for differences in asynchrony (i.e. there was no statistically significant interaction [F(2, 18) = 2.311, P = 0.128)]. Prevailing models of movement synchronisation suggest that movement initiation is controlled by first-order linear phase correction (Vorberg and Wing 1996; Pressing 1998) in which the onset of the next action in a sequence (T n+1) is timed in relation to the registered error between the previous goal (i.e. the metronome pulse or internal timekeeper signal) and the previous outcome (i.e. the executed action). In particular:
where, T n+1 is the ongoing time interval, T n is the participant’s estimate of the previous time interval, \( \hat{A}_{n} \) is the estimated asynchrony (i.e. error) between the previous movement response and the metronome signal. α is the correction factor, a weight defined in the range (0, 2) given to the error signal (\( \hat{A}_{n} \)) in controlling the next movement. Vorberg and Schulze (2002) suggest that the goal of movement synchronisation is to minimise asynchrony variability. Their detailed analysis of the linear phase correction model shows how minimising asynchrony variability will result in the corresponding IRI variability being greater. From our comparative results of IRI and asynchrony standard deviations, we suggest that a strategy of minimising asynchrony variability is implemented in this task. Moreover, the increased variability in the continuous movement condition is consistent with the lack of a clear movement onset or offset which increases uncertainty in the estimate of the error between the action goal and its outcome. This could potentially result in a reduced correction factor in comparison to correction for discrete movements.
To substantiate this idea, we inserted a phase perturbation into the metronome (Repp 2000, 2002a, b), making a single, randomly chosen interval shorter or longer than the 500 ms period by 50 ms (Fig. 1b). This perturbation resulted in the participants being suddenly out of phase with the metronome, thus providing a strong stimulus for error correction. We chose a phase shift that was sufficiently small to be within the linear range (Repp 2002a, b) so that post-pertubation corrections were expected to follow the asymptotic recovery observed in Repp’s initial work on phase correction (Repp 2000).
After introducing a sudden metronome perturbation, it took participants some time to recover to pre-perturbation levels of synchrony (Fig. 2b). In particular, correction was initiated immediately following the phase perturbation, however full correction was only completed between one and three intervals after the perturbation (Fig. 2c). To quantify this recovery time, we fitted an exponential curve to each participant’s data to determine the point in time at which responses returned to baseline. Importantly, we found that the type of movement made by participants influenced the recovery time (Fig. 2c), with adjustments of continuous actions taking significantly longer than tapping movements [F(1, 9) = 25.671, P = 0.001]. Again, pulsed movements showed no difference in recovery time compared with tapping movements [F(1, 9) = 0.246, P = 0.632]. These results met our expectation that the higher variability associated with continuous actions would result in weaker error correction.
To explore further the idea that the ‘discreteness’ of the action being made has an impact on error correction, we capitalised on between-subjects differences in the time taken to recover following a perturbation. To quantify the discreteness of a movement, we followed Hogan and Sternad’s (2007) suggestion that mean-squared jerk can be used as a metric of discreteness. As we had made measurements with force transducers, we calculated the mean-squared rate of change of force, or mean-squared yank (msy), which is a scaled equivalent of mean-squared jerk. Using regression analysis, we found evidence that a higher msy is associated with shorter recovery times [Fig. 2d; F(1, 15) = 6.105, P = 0.026, R = 0.538], consistent with the notion that discrete actions are subject to less uncertainty and thus improve synchronisation performance.
Finally, we assessed whether the continuous actions we studied might have been unfairly disadvantaged by the use of a relatively short metronome period (500 ms). In particular, biomechanical constraints will impose a limit on rhythmic production (Aoki et al. 2003; Repp 2003), and it is possible that this limit is reached at slower tempos for continuous movements than for discrete movements. To this end, we tested a subset of participants (n = 4) by comparing tapping movements and continuous actions with different metronome periods (500, 800 or 1,000 ms). As expected (Wing and Kristofferson 1973), variability increased with the metronome period [F(2, 6) = 26.673, P = 0.005]. This was true for both tapping and continuous actions, and there was no interaction [F(2, 6) = 0.102, P = 0.905] indicating that our main results did not disadvantage continuous actions unfairly due to a relatively short metronome interval. In particular continuous actions had more variability in all cases [F(1, 3) = 39.400, P = 0.024].
Discussion
A growing volume of work has examined the distinctions between discrete and continuous modes of operation in the temporal control of action (Zelaznik et al. 2002; Spencer et al. 2003, 2007; Hogan and Sternad 2007; Schaal et al. 2004; Robertson et al. 1999; Zelaznik et al. 2005). Here, we examined two movement properties important in everyday tasks: the variability in action production and the rate at which behaviour can be adjusted in response to changes in the environment. Our principal findings are that continuous actions produce higher timing variability, and are slower to adjust following changes in the sensory input.
In addition to discrete tapping and the continuous oscillating force action, we considered an action type that required continuous, but non-smooth, force application (pulsed action). This condition was designed to cancel out any differences in action control when comparing the free movement of tapping to the near isometric action of the continuous movement. Our results confirmed that these pulsed movements shared greater similarity with finger tapping than continuous actions. In common with a previous study (Balasubramaniam et al. 2004), this points to rhythmic synchronisation being guided by discontinuities in movement production. We suggest that the higher rate of change in movement force provides a more reliable error signal as part of linear phase correction (Vorberg and Wing 1996; Vorberg and Schulze 2002) in movement synchronisation. The smooth structure of continuous actions (Hogan and Sternad 2007) increases the central nervous system’s uncertainty about the discrepancy between the timing of the planned and produced movement, thus making movement onsets more variable and producing longer recovery times after an external perturbation.
It is interesting to consider how our findings might apply to synchronisation of ensemble musical performance. In an orchestra, the conductor uses baton movements to provide a lead on expressive features of the music, including loud-and-soft dynamics and local accelerando or ritardando in timing. Although there are conventions for conducting in different tempi (e.g. 3/4 vs. 4/4), there are no absolute standards for defining the beat. Thus, the point on the movement cycle that will be considered to be the beat may vary from one conductor to the next. Moreover conductors’ movement trajectories can often appear smoothly continuous. However, skilled musicians develop great sensitivity to baton movements, and synchronisation studies have shown (Luck and Toiviainen 2006; Luck and Sloboda 2008) that points of relatively high acceleration are picked out by the players to define events. Thus, there appears to be a complementarity between events that assist observation of timing in an otherwise continuous movement flow, and events in a movement stream that a performer can insert to improve synchronisation.
In sum, here we demonstrate that smooth continuous actions give rise to higher levels of variability than discrete movements, with the consequence that error correction takes longer. We conclude that synchronising continuous actions with ongoing events is harder and consequently discrete movements are likely to be preferred when engaging in time-critical adaptive behaviour with other people or objects moving in our dynamic environment.
References
Aoki T, Francis PR, Kinoshita H (2003) Differences in the abilities of individual fingers during the performance of fast, repetitive tapping movements. Exp Brain Res 152:270–280
Aschersleben G (2002) Temporal control of movements in sensorimotor synchronization. Brain Cogn 48:66–79
Balasubramaniam R, Wing AM, Daffertshofer A (2004) Keeping with the beat: movement trajectories contribute to movement timing. Exp Brain Res 159:129–134
Elliott MT, Welchman AE, Wing AM (2008) MatTAP: a MATLAB toolbox for the control, analysis of movement synchronisation experiments. J Neurosci Methods. doi:10.1016/j.jneumeth.2008.10.002
Hogan N, Sternad D (2007) On rhythmic and discrete movements: reflections, definitions and implications for motor control. Exp Brain Res 181:13–30
Luck G, Sloboda J (2008) Exploring the spatio-temporal properties of simple conducting gestures using a synchronization task. Music Percept 25:225–239
Luck G, Toiviainen P (2006) Ensemble musicians synchronization with conductors gestures: an automated feature-extraction analysis. Music Percept 24:189–200
Marder E (2000) Motor pattern generation. Curr Opin Neurobiol 10:691–698
Neda Z, Ravasz E, Brechet Y, Vicsek T, Barabasi AL (2000) Self-organizing processes: the sound of many hands clapping. Nature 403:849–850
Pinheiro J, Bates D (2007) R: a language and environment for statistical computing (documentation). http://www.R-project.org
Pressing J (1998) Error correction processes in temporal pattern production. J Math Psychol 42:63–101
Repp BH (2000) Compensation for subliminal timing perturbations in perceptual-motor synchronization. Psychol Res 63:106
Repp BH (2002a) Automaticity and voluntary control of phase correction following event onset shifts in sensorimotor synchronization. J Exp Psychol Hum Percept Perform 28:410–430
Repp BH (2002b) Phase correction in sensorimotor synchronization: nonlinearities in voluntary and involuntary responses to perturbations. Hum Mov Sci 21:1–37
Repp BH (2003) Rate limits in sensorimotor synchronization with auditory and visual sequences: the synchronization threshold and the benefits and costs of interval subdivision. J Mot Behav 35:355–370
Repp BH (2005) Sensorimotor synchronization: a review of the tapping literature. Psychon Bull Rev 12:969–992
Robertson SD, Zelaznik HN, Lantero DA, Bojczyk KG, Spencer RM, Doffin JG et al (1999) Correlations for timing consistency among tapping and drawing tasks: evidence against a single timing process for motor control. J Exp Psychol Hum Percept Perform 25:1316–1330
Schaal S, Sternad D, Osu R, Kawato M (2004) Rhythmic arm movement is not discrete. Nat Neurosci 7:1136–1143
Spencer RMC, Zelaznik HN, Diedrichsen J, Ivry RB (2003) Disrupted timing of discontinuous but not continuous movements by cerebellar lesions. Science 300:1437–1439
Spencer RMC, Verstynen T, Brett M, Ivry R (2007) Cerebellar activation during discrete and not continuous timed movements: an fMRI study. NeuroImage 36:378–387
Stevens LT (1886) On the time sense. Mind 11:393–404
Turvey MT (1977) Preliminaries to a theory of action with reference to vision. In: Shaw R, Bransford J (eds) Perceiving. acting and knowing. Erlbaum, Hillsdale, pp 211–265
Vorberg D, Schulze HH (2002) Linear phase-correction in synchronization: predictions, parameter estimation, and simulations. J Math Psychol 46:56–87
Vorberg D, Wing AM (1996) Modeling variability and dependence in timing. In: Heuer H, Keele SW (eds) Handbook of perception and action. Academic Press, London, pp 181–262
Wing AM, Kristofferson AB (1973) Response delays and the timing of discrete motor responses. Percept Psychophys 14:5–12
Zelaznik HN, Spencer RMC, Ivry RB (2002) Dissociation of explicit and implicit timing in repetitive tapping and drawing movements. J Exp Psychol Hum Percept Perform 28:575–588
Zelaznik HN, Spencer RMC, Ivry RB, Baria A, Bloom M, Dolansky L et al (2005) Timing variability in circle drawing and tapping: probing the relationship between event and emergent timing. J Mot Behav 37:395–403
Zivotofsky A, Hausdorff J (2007) The sensory feedback mechanisms enabling couples to walk synchronously: an initial investigation. J Neuroeng Rehabil 4:28
Acknowledgments
This work was supported by grants from the Biotechnology and Biological Sciences Research Council [C520620, EO09565]. The authors thank Dirk Vorberg and Hans-Henning Schultz for their comments on an earlier draft of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Elliott, M.T., Welchman, A.E. & Wing, A.M. Being discrete helps keep to the beat. Exp Brain Res 192, 731–737 (2009). https://doi.org/10.1007/s00221-008-1646-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-008-1646-8