
Abstract
A number of studies have demonstrated high coordination of the hand grip force (GF; normal component of force acting at the digits-object contact area) and load force (LF; tangential component) in a variety of manipulation tasks. The aim of the study was to explore the mainly neglected effect of the change in LF direction and the effect of handedness on GF and LF coordination in bimanual manipulation task. Subjects (N = 14) exerted a bimanual sinusoidal LF pattern against externally fixed handles in trials that gradually changed from unidirectional (LF exerted only in one direction) to fully bidirectional (equal LF peaks in two opposite directions). Despite the gradual change of LF, unidirectional trials demonstrated high indices of force coordination, while in all bidirectional trials, no matter how low and brief LF exertion was in the opposite direction, all indices of GF and LF coordination deteriorated to a considerably lower level. The non-dominant hand demonstrated both a higher directional accuracy of exerting LF and higher GF modulation than the dominant one. We concluded that manipulation tasks performed in a single and two alternating directions may be based on partly distinctive neural control mechanisms, as well as that a switching of muscle synergies required in bidirectional tasks could play a role in the observed phenomenon. Regarding the effect of hand dominance, the recorded advantage of the non-dominant hand could be considered as an addition to the current views of the non-dominant arm/hemisphere specialization in controlling limb position.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The human hand represents a highly specialized system designed for skilful object grasping and manipulation. When manipulating a hand-held object, two orthogonal components of the force acting at the object’s contact surface are of particular importance. The tangential force component (i.e., parallel to the object’s contact surface) originates from the object weight and inertia or, alternatively, from the reaction of the externally fixed support. Due to the orientation, this component also tends to cause slippage. In further text we will refer to this component as load force (LF). The orthogonal component with respect to LF is grip force (GF) and it acts normally to the surface of the digits-object contact. Note that the basic mechanical requirement for preventing slippage is that at any point of time the product of GF and the friction coefficient has to be larger than LF. As a result, in order both to prevent slippage and to avoid the exertion of excessive grip, which can cause muscle fatigue or crash fragile objects, appropriate adjustments of GF should be implemented simultaneously or even in advance to changes in LF associated with object manipulation. Consequently, it should not be surprising that the CNS maintains a close coordination of GF and LF in variety of manipulation tasks (Johansson and Westling 1984; Westling and Johansson 1984b; Johansson and Westling 1987a; Cole and Abbs 1988; Johansson and Westling 1988; Johansson et al. 1992; Flanagan et al. 1993; Flanagan and Wing 1993, 1995; Johansson 1998). This coordination originates from a continuous adjustment of GF to changes in LF virtually without any time delay between them (Westling and Johansson 1984b; Flanagan and Wing 1995; Gysin et al. 2003; Zatsiorsky et al. 2005; Jaric et al. 2006). As a consequence, it has been concluded that GF and LF coordination is based on predictive neural mechanisms (Cole and Abbs 1988; Johansson and Westling 1988; Flanagan and Wing 1995; Johansson 1998). Within the following paragraphs we will deal with particular aspects of that coordination, as well as with the corresponding methods for coordination assessment.
The coordination of GF and LF has been assessed from several aspects. For example, a consequence of the ongoing GF adjustment to LF changes is a relatively stable GF/LF ratio with a relatively low “safety margin” [i.e. the amount of GF/LF ratio that exceeds the minimal amount required to prevent slippage (Johansson and Westling 1984; Westling and Johansson 1984a; Flanagan et al. 1999)]. The coupling of GF and LF has been assessed by cross correlations. Specifically, both a high correlation coefficient and low time lags between GF and LF have been interpreted as indices of high force coupling (Paulignan et al. 1989; Flanagan and Wing 1995, 1997; Jaric et al. 2005b, 2006). Finally, the extent to which GF changes with changes in LF have been assessed by regression lines obtained from GF-LF diagrams. The slope and intercept of the regression lines were interpreted as gain and offset of GF. As a result, a high modulation of GF was expected to be revealed by either a high gain, or low offset, or both (Westling and Johansson 1984b; Flanagan and Wing 1995; Zatsiorsky et al. 2005; Jaric et al. 2006).
An implicit support for the selection of the above mentioned variables for the assessment of GF and LF coordination comes from the studies performed on populations well known for impaired hand function. For example, a remarkably consistent finding observed from various neurological diseases is an elevated GF/LF ratio, such as in Parkinson’s disease (Fellows et al. 1998), Huntington’s disease (Serrien et al. 2002), cerebellar lesions (Serrien and Wiesendanger 1999), cerebellar atrophy (Nowak et al. 2002b), multiple sclerosis (Marwaha et al. 2006), or stroke (Nowak et al. 2003). Note that an elevated GF/LF ratio could not only cause a rapid fatigue and even crush some hand-held objects, but also prevent fine motor coordination. Reduced correlation coefficients and delayed adjustments of GF to changes in LF (Duque et al. 2003; Jaric et al. 2005a; Rost et al. 2005; Jaric et al. 2006) and a decreased GF modulation have also been seen in neurological patients (Rost et al. 2005; Marwaha et al. 2006). However, the observed deterioration of GF and LF coordination is not only population specific (such as recorded in neurological patients), but also task and experimental conditions specific. For example, the coordination of GF and LF also deteriorates when the skin receptors are anesthetized (Nowak et al. 2001; Augurelle et al. 2003b) which emphasizes the role of sensory information in online control and coordination of GF and LF. A similar phenomenon has been also observed from more complex tasks, such as under a higher rate of LF change (Flanagan and Wing 1995; Zatsiorsky et al. 2005), or in bimanual asymmetric tasks (Serrien and Wiesendanger 2001a, b).
Although virtually all studies of force coordination have investigated the manipulation tasks based on exerting LF in a single direction (e.g., lifting and holding an object), a considerable number of manipulation activities are also characterized by consecutive exertion of LF in two opposite directions. The examples could be shaking an object, consecutive strokes performed by hand-held tools (e.g. handsaw, or hammer), or using external support to provide reaction forces in different directions in order to preserve balance in a turbulent ride. An altered pattern of GF and LF coordination associated with shaking an object vertically with an acceleration exceeding g = 9.81 m/s2 has been already recorded, but not specifically discussed (Flanagan and Wing 1995). Therefore, of particular importance for the present study could be our recent findings (Jaric et al. 2005b) obtained from exerting sinusoidal pattern of static LF either by only pushing-in (a unidirectional task, since LF is exerted in only one direction) or by consecutive pushing in and pulling out handles of an experimental device (bidirectional task, since LF is consecutively exerted in two opposite directions). The results demonstrated a marked increase in GF/LF ratio, as well as a decrease in both force coupling and GF modulation associated with switching from unidirectional to bidirectional task. The findings also suggested that the change of force coordination does not originate from the requirement to exert a doubled GF modulation frequency during the bidirectional tasks as compared to the unidirectional ones. Namely, a unidirectional task performed at 2.67 Hz demonstrated higher GF and LF coordination than the bidirectional trial performed at 1.33 Hz. We interpreted the findings using the theoretical concept of muscle synergies. Briefly, the synergies represent neural organizations of elements aimed towards improvement in task performance and typically share a common input or neural drive that leads to stable relationships among them over time (Li et al. 1998; Latash et al. 2003). We speculated that a relative simplicity of the control mechanisms of the unidirectional task based on a stable muscle synergy allowed for a high GF and LF coordination. Due to the continuous switching in action of antagonistic muscles exerting bidirectional LF, two distinctive synergies involving LF and GF muscles had to be employed and the resulting higher control complexity could have caused a deteriorated force coordination.
Several aspects of the above described phenomenon could be worth further studies. For example, an important question is whether the results of our previous study (Jaric et al. 2005b) revealed two distinctive patterns of GF and LF coordination or, alternatively, the indices of coordination steadily deteriorate as the manipulation task gradually shifts from a pure unidirectional to fully bidirectional (i.e. the magnitude of LF in two directions are comparable). In the former case, the results would suggest existing of two partly independent neural control mechanisms of manipulation tasks performed in one and in two alternating directions. In the latter case, however, the results would suggest a single mechanism gradually adjusted to the pattern of the exerted LF. If the interpretation of our recent findings (Jaric et al. 2005b) based on the role of muscle synergies is correct, one could expect two distinctive coordinative patterns to be recorded from uni- and bidirectional tasks. Specifically, no matter how much LF is higher in one than in the opposite direction, muscle synergies have to be switched in order to provide at least a brief interval of the coupling between GF muscles with the antagonistic group producing LF in the opposite direction.
Another aspect worth studying could be the effect of hand dominance on GF and LF coordination. A classic view that the dominant and non-dominant arms are predominantly controlled by open- and closed-loop neural mechanisms, respectively, has been challenged over the last decade (for review see Sainburg 2002). Alternatively, a model of motor lateralization has been recently proposed (Sainburg 2002, 2005) suggesting that while the dominant limb/hemisphere could be specialized for controlling limb trajectory using torque-efficient strategies (Bagesteiro and Sainburg 2002), the non-dominant limb/hemisphere is specialized in controlling limb position due to more effective load compensation (Bagesteiro and Sainburg 2003). However, the model neither strictly applies to static force exertion, nor deals with an important phenomenon such as the elaborate coordination of GF and LF in manipulation activities that can be generalized to a variety of grasping techniques (Freitas et al. 2007). While testing several indices of force coordination, our recent study only revealed a somewhat lower GF/LF ratio of the non-dominant hand [as compared with the dominant, (Ferrand and Jaric 2006)] in static bimanual tasks. However, both the inability of the previously used device to take into account different components of both GF and LF and a lack of gradual change in LF direction could have concealed some important effects of handedness (see further text for details).
Within the present study we tested a static bimanual manipulation task. Subjects were instructed to hold externally fixed handles and exert a sinusoidal LF profile in vertical direction, while a change of the LF minima gradually shifted the LF pattern from a purely unidirectional to bidirectional one. The first aim was to investigate whether the manipulation tasks performed with and without changes in direction are associated with the same or, alternatively, with two distinctive pattern of force coordination. Based on the above discussed concept of muscle synergies, we hypothesized that despite the gradual change in LF direction, the indices of GF and LF coordination would exhibit two distinctive patterns. Specifically, a high coordination (i.e. a low GF/LF ratio, and a high GF-LF coupling and high GF modulation) would be expected from trials performed in only one direction, while all bidirectional trials (including even those with brief intervals of a relatively weak force exerted in the opposite direction) would reveal a pattern of low GF and LF coordination. The second aim of the present study was to explore specific effect of the hand dominance on the studied force coordination. Based on our recently demonstrated lower GF/LF ratio of the non-dominant hand (although recorded using partly different methods; Ferrand and Jaric 2006), as well as due to the static nature of the tested task that correspond more to controlling position than trajectory (see previous paragraph), we hypothesized that the non-dominant hand could demonstrate an advantage in force coordination over the dominant hand.
Methods
Subjects
Fourteen healthy adults (seven males and seven females) between 22 and 32 years of age voluntarily participated in this study. Thirteen out of fourteen participants were categorized as right handed and one as left handed according to Edinburgh inventory questionnaire (Oldfield 1971). The experimental procedure was approved by the Human Subjects Review Board of the University of Delaware and all subjects signed a written informed consent.
Experimental apparatus
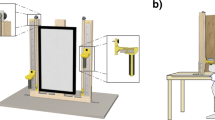
The experimental device used is shown schematically in Fig. 1a. It consists of two externally fixed parallel handles covered by rubber and four built-in force transducers. The single-axis force sensor (WMC-50, Interface Inc., USA) measured compression force (F C) exerted against the handles laterally by the tip of the thumb. Since these transducers rigidly connected both sides of each handles, the multi-axis force transducer (Mini40, ATI, Apex, NC, USA) positioned below were able to record all three components of the force applied against the handles. The lateral component (F Y) measured the force exerted by the tips of the fingers exerted medially and, thus, enabled calculation of the grip force (GF; see Fig. 1a) as the average orthogonal force applied against two sides of each handle. The remaining two components (vertical F Z and horizontal F X) served for calculation of the load force (LF). Note that due to the direction of the recorded forces, GF acted normally, while LF acted tangentially to the surface of the contacts between the hand and handles. To enable the most comfortable wrist position, the handles were rotated 45° with respect to the subjects’ sagittal plane (see Fig. 1b).

a Schematic representation of the device. Force transducers (shaded rectangles) record grip force (GF; average of F C and F Y) and load force (LF; absolute value of the vectorial sum of F Z and F X). b Illustration of the experimental conditions: subject exerts vertical LF (perpendicular to the figure) with the feedback depicted at computer monitor. c Illustration of the prescribed indices of bidirectionality (IB) depicted on the computer screen. See text for further information
The device was fixed in front of the standing participant and the height was individually adjusted for each participant to keep the upper arms vertical (i.e., parallel to the trunk) and the forearms and hands horizontal (i.e., perpendicular to the upper arms). A 17-in. computer screen was placed in front of the subject (Fig. 1b). It displayed 2 horizontal lines representing the upper and lower boundary (in further text F Z upper and F Z lower, respectively) that should be reached during exerting oscillatory pattern of F Z, as well as the current real-time averaged F Z (vertical component of LF) exerted by the participant’s right and left hand.
Experimental procedure
The participants were tested on oscillatory bimanual manipulation task performed under isometric conditions. They were instructed to hold the handles using tips of their four fingers and the thumb (i.e. to apply a precision grip) and exert force vertically against the handles (i.e., pulling up or/and pushing down) using both hands simultaneously. Specifically, they were asked to produce the force between two horizontal lines depicted on a computer screen in front of them “as accurately as possible” pulling up or/and pushing down the handles. They were also explicitly instructed to keep their digits at the handles throughout the trial (see Fig. 1b). The exerted force was paced by a metronome set at 1.33 Hz. Based on our previous studies (Jaric et al. 2005b, 2006; Krishnan et al., submitted), the force pattern was expected to fairly correspond to a sinusoidal force pattern.
In addition to the combined action of two hands in exerting force in vertical direction, which was expected to reveal some specific aspects of hand dominance, we also manipulated the change in force direction by changing the lower boundary of depicted force (see Fig. 1b). In order to measure the extent to which the prescribed force was exerted in one with respect to the opposite direction, we used the index of bidirectionality (IB). Specifically, we calculated the prescribed IB from the upper and lower boundaries of F Z peaks shown as a feedback on the computer screen as:
where F Z was the vertical component of the exerted load force. Based on gradually changing F Z lower, the subjects were tested on six experimental trials performed with different prescribed IB that ranged from −25 to 100%. They provided two unidirectional trials (IB = −25% and IB = 0%, the former one corresponded to F Z that did not reach zero over the entire period) and four bidirectional trials (IB ranging from 25 to 100%, where the maximum 100% corresponded to symmetric bidirectional trial where the F Z peaks in pulling up and pushing down were the same; see Fig. 1c for illustration). After collecting the data we used the same index (Eq. 1) to calculate the recorded IB from the exerted peaks of F Z (see next section for details). We expected that an accurate exertion of F Z would provide the actually recorded IB close to the prescribed IB.
The experimental procedure was conducted within a single session. Prior to the experiment the participants cleaned the tips of their digits with alcohol swab and dried them with paper tissue. Thereafter, the maximum GF of each hand was separately recorded. Approximately 10% of the maximum GF of the weaker hand was used as the instructed individual peaks of F Z. Based on our previous studies (Jaric et al. 2005a, 2006), that level of force was not expected to cause fatigue during the experimental session. Accordingly, the peaks of the prescribed F Z were participant specific and ranged from 5 to 13 N.
After having their maximum GF measured, the participants practiced the experimental task with different prescribed IB over approximately 15 min. Finally, six experimental trials were performed under each of the six prescribed IB (see above). The trials were performed in random sequence and the data were recorded for further analysis. Note that the subjects were only instructed to produce vertical LF by bimanually pulling up or, alternatively, pulling up and pushing down the handles, while GF was not mentioned over the entire experiment.
Data processing and analysis
The signals from all four force transducers were recorded at a sampling frequency of 200 Hz and stored for later analyses. The raw data were low-pass filtered at 10 Hz with a fourth-order (zero-phase lag) Butterworth filter. Individual trials lasted 16 s. Since we were not interested in either the transient neural control mechanisms or inaccurate data regarding both the frequency and peaks of F Z, the data from the first 10 s and the last 1 s of each trial were omitted. Specifically, the first 10 s were considered as a time period needed to adjust the F Z exertion to both the prescribed frequency and the prescribed F Z peaks, while the last second could be affected by preparation for the trial termination. As a result, only the data between the 10th and 15th s were analyzed.
GF of each hand was calculated as the average force exerted by the tips of four finger and by the thumb, both acting normal to the contact surface [GF = (F Y + F C)/2); see Fig. 1a]. F Y was recorded by the multi-axis force transducer positioned below the handle, while F C was obtained from the single-axis force transducer positioned within the handle. Although the subjects were instructed to exert force in vertical direction and only F Z was used as feedback, most of the time they also exerted a component of the force in horizontal direction measured as F X (see Fig. 1a). As a result, we calculated LF as the resultant tangential force (i.e., the absolute value of the vectorial sum of F X and F Z, while the sign corresponds to the sign of F Z; see the formula in Fig. 1a) tending to cause slippage and, therefore, it had to be counteracted by the friction force provided by GF. As a consequence, using the multi-axis transducers allowed more accurate calculation of both GF (through the measured F Y) and LF (through F X) than in our recent studies, which could have affected the observed dependent variables (see Discussion for more details).
Two groups of dependent variables were separately calculated and statistically processed. The first one included the indices of task performance regarding the laterally symmetric exertion of the prescribed LF in vertical direction. Specifically, we calculated the recorded IB (since the subjects could have been inaccurate while trying to accomplish the prescribed IB), hand contribution, and horizontal deviation of LF. The recorded IB was calculated from the averaged maxima and minima of vertical component of force F Z (F Z upper and F Z lower) using the same method as applied for the calculation of the prescribed IB (see Eq. 1). The result was expected to reveal how closely the subjects were able to reproduce the prescribed IB. The assessment of hand contribution was needed due to the task’s mechanical redundancy. Simply, the same instructed F Z could be exerted by different contribution of the forces exerted by individual hands. The index of hand contribution was calculated as the ratio between the averaged F Z of the non-dominant and dominant hand. As a result, the index equals 1 reveals the same involvement of two hands, while the values above and below 1 mean that the non-dominant and dominant hand, respectively, were more involved in producing F Z. Finally, we calculated the horizontal LF deviation as a ratio between the averaged absolute values of F X (the horizontal component of LF) and F Z (vertical component of LF). For example, a perfect exertion of LF in the prescribed vertical direction would reveal the zero deviation (horizontal component of LF (i.e. F X) equals zero during the entire trial), while a horizontal LF deviation equals 1 would mean that, despite being instructed to exert LF vertically, the subjects exerted comparable forces in horizontal direction as well.
Another group of the dependent variables was expected to reveal the indices of GF and LF coordination. In line with the methods employed in a number of previous studies (Flanagan and Wing 1995; Nowak et al. 2002b; Gysin et al. 2003; Jaric et al. 2005b, 2006; Freitas et al. 2007), the coordination of GF and LF was assessed by grip force-to-load force ratio (GF/LF ratio; calculated from each trial as the averaged within-trial GF divided by the averaged within-trial LF), by GF and LF coupling, as well as by GF modulation. GF/LF ratio represents the amount of GF used by the individuals with respect to the LF (also related to ‘safety margin’, Johansson and Westling 1984; Westling and Johansson 1984b) and the lower ratio (i.e. lower safety margin) that have been interpreted as an index of higher force coordination. Assessed by cross correlation, a high level of force coupling was expected to be revealed through high correlation coefficients and short time lags between GF and LF (Flanagan and Wing 1997; Augurelle et al. 2003b; Gysin et al. 2003; also see Introduction for details). Finally, a high level of GF modulation with respect to changes in LF was assessed by GF gain and offset obtained from the slope and intercept, respectively, of the linear relationship assessed from diagrams representing GF as a function of the absolute LF (Flanagan and Wing 1995; Zatsiorsky et al. 2005).
One-way repeated measures ANOVAs were used to evaluate the differences among the recorded IB when the instructed IB were −25, 0, 25, 50, 75, and 100%, as well as to test possible differences in hand involvement. One-sample t-tests were employed to evaluate whether the index of hand involvement obtained under each different IB was different from 1. Two-way repeated measures ANOVA was used to test the effects of IB and hand (dominant vs. non-dominant) on the horizontal LF deviation. The remaining dependent variables were expected to reveal specific aspects of the GF and LF coordination. Therefore, a two-way repeated measures MANOVA was implemented to assess the main effects of IBs and hand on GF/LF ratio, Z-transformed correlation coefficients between GF and LF, the corresponding time lags, and the GF gain and offset. Univariate analyses and post-hoc tests with Bonferroni adjustments were used when necessary. The level of significance was set at P < 0.05. Statistical analyses were performed in SPSS 10.0 for Windows (SPSS Inc., Chicago, USA)
Results
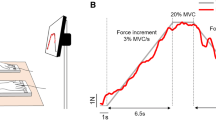
Figure 2 depicts force profiles obtained under three out of six prescribed IB from a representative subject. For the sake of better visualization, the left hand panels show only two out of five seconds of the processed data interval. Note that two hands produce a similar pattern of both GF and LF regardless the prescribed IB. However, an obvious difference between the unidirectional trial (IB = −25%; Fig. 2a) and two bidirectional ones (IB = 50% and IB = 100%; Fig. 2b and c) appears regarding both the coordination of GF and LF and the amount of GF modulation. The consequences are shown at the GF-LF diagrams (right hand panels of Fig. 2). In particular, both hands demonstrate higher slopes (corresponding to the gain of GF modulation), lower intercepts (interpreted as the offset of GF modulation), and higher correlation coefficients (interpreted as coupling of GF and LF) in uni- than in either of the two bidirectional trials.

The data obtained from a representative subject under three indices of bidirectionality (IB). Left-hand panels show GF and LF of the dominant (D) and non-dominant (ND). Right-hand panels illustrate the corresponding GF-LF diagrams with the corresponding regression lines, equations and correlation coefficients for each hand separately
Table 1 depicts the task performance variables based on the indices of LF exertion. It appears that due to a high accuracy of exerted peaks of Fz, the recorded IB closely matched the prescribed IB. Furthermore, the one-way repeated measures ANOVA revealed a significant effect of the instructed on the recorded IB (F(2,38) = 558, P < 0.001) and the post-hoc tests suggested significant differences among all individual IB (P < 0.001). One-way repeated measures ANOVA also revealed a significant effect of IB on the index of hand involvement (F(3,33) = 4.8, P < 0.05; see Table 1). The post-hoc tests revealed that the index was lower for IB = −25% than in either IB = 75% and IB = 100%, suggesting that the dominant hand was more involved in exerting F Z in uni- than in bidirectional tasks. However, when individual trials were tested against the index equals 1, only IB = −25% trial revealed significantly higher involvement of the dominant hand. Finally, a two-way ANOVA revealed the main effect of IB (F(2,60) = 8.5, P < 0.005), hand (F(1,12) = 8.3, P < 0.001), and interaction between IB and hand (F(2,25) = 3.5, P < 0.05) on the horizontal LF deviation. The post-hoc tests suggested a lower deviation in unidirectional trials (IB equals −25 and 0%) than in the bidirectional trials with IB = 25, 50, and 75%. A pairwise comparison also revealed significantly larger horizontal LF deviations of the dominant hand in bidirectional (P < 0.05), but not in unidirectional trials (P > 0.05).
Figure 3 shows the averaged across the subjects indices of GF and LF coordination. A visual inspection suggests a prominent effect of LF direction. In particular, when compared with the bidirectional trials, the unidirectional ones suggest a lower GF/LF ratio, higher correlation coefficients, higher gain and lower offset. Regarding the differences between two hands, one can only notice a somewhat higher gain and lower offset of the non-dominant hand. Finally, note that the most of the time lags were within the intervals of few tens of ms. When statistically tested, the repeated measures MANOVA performed on all variables depicting the force coordination revealed the main effects of IB (Willks’ Lambda = 0.1, F(25,300) = 7.6, P < 0.001, η2 = 0.37) and hand (Willks’ Lambda = 0.3, F(5,8) = 4, P = 0.041, η2 = 0.7), but no IB×hand interaction (Willks’ Lambda = 0.7, F(25,210) = 0.7, P = 0.83, η2 = 0.06). Univariate analyses revealed the effect of IB on all five dependent variables (GF/LF ratio (F(4,35) = 14, P < 0.001); Z-transformed correlation coefficient (F(2,27) = 44, P < 0.001); time lag (F(5,60) = 3, P < 0.05); gain (F(3,37) = 27, P < 0.001); and offset (F(2,26) = 23, P < 0.001)). In addition, univariate analyses revealed the effect of hand only on gain (F(1,12) = 6, P < 0.05) indicating a higher gain in the non-dominant than in dominant hand, while the same effect on the offset was below the level of significance (F(1,12) = 1.2, p = 0.28).

Indices of force coordination averaged across the subjects: a GF/LF ratio, b median correlation coefficients between GF and LF, c time lags between GF and LF (positive values denote that GF precedes LF), d gain, and e offset of GF. The error bars represent standard errors
Of particular importance could be that the post-hoc analysis of the effect of IB revealed remarkably consistent findings. Specifically, GF/LF ratio, correlation coefficients, and gain were all lower in both unidirectional (IB = −25 and 0%) than in all four bidirectional trials (IB = 25, 50, 75, and 100%). Only the data regarding the offset proved to be slightly different since they additionally proved to be lower in IB = 25% than in all three remaining bidirectional trials (IB = 50, 75, 100%). Finally, although a significant main effect of IB on time lags had been observed in univariate analysis, post-hoc tests with Bonferroni corrections revealed no differences among individual trials.
Discussion
The aim of the study was to explore the effects of both the change of LF direction and hand dominance on force coordination in bimanual static manipulation. The results revealed two distinctive patterns of GF and LF coordination associated with uni- and bidirectional exertion of LF, as well as some advantages of the non-dominant hand in both force coordination and task performance. However, prior to discussing the main findings of the present study, several important methodological issues need to be addressed.
Methodological consideration
Regarding the subjects’ accuracy of exerting the required LF profiles, the results revealed a high correspondence between the prescribed and recorded IB. This finding suggests that the six tested manipulation trials were closely in line with the prescribed LF pattern gradually changing from uni- to bidirectional one, which enabled testing the hypothesized effect of LF direction on force coordination.
When studying force coordination in grasping and manipulation tasks, two distinctive approaches have been used regarding the selection of dependent variables. Specifically, in order to reveal the underlying neural control mechanisms, both the relationship both between the forces (such as GF and LF; c.f. Johansson and Westling 1987b; Flanagan and Wing 1995; Augurelle et al. 2003a; Jaric et al. 2005b) and the derivatives of forces (Flanagan and Wing 1997; Ohki and Johansson 1999) have been studied. Although the rationale for the selection of either of these approaches has not been discussed, one could expect that the respective authors implicitly presumed that either the muscle forces or rates of their changes are more likely to reveal the studied control mechanisms. To provide findings relevant for both of the approaches from a single set of data, we purposely selected a task based on sinusoidal force profiles (i.e., mathematically, a derivative of a sinusoidal function is also a sinusoidal function).
In line with similar manipulation tasks performed against light loads in everyday life (e.g., holding an object, using external support) no substantial movements were seen in any of the arm and hand joints. Since the arm configuration was mainly preserved, the linkage of the arm and hand segments producing LF was mechanically “over-constrained”. Namely, for the given arm position the exertion of the instructed LF in each instant of time required one and only one torque acting in each particular joint (i.e., shoulder, elbow, wrist and digit joints). Therefore, the subjects do not have “choices” as to how much to use particular joints/muscle groups. This should justify the presumption of muscle synergies discussed in further text.
When compared with both our previous studies (Jaric et al. 2005a, b, 2006) and a number of other studies of force coordination (c.f., Augurelle et al. 2003b), the most important methodological improvement of the present one could be using the transducers ability to measure all three components of the force exerted against the handles (i.e., the transducers positioned below each handle; see Fig. 1a), instead of only the vertical one. As a consequence, we were able to record not only the accurate normal component of force (i.e. GF as an average of two opposing forces acting against two sides of each handle), but also the actual LF force tending to cause slippage (i.e., the vectorial sum of F X and F Z). Not surprisingly, when we compared our present data with the data calculated from the same experimental recordings but using only the vertical component of the LF, we found prominent differences. For example, when averaged across the subjects and trials, we found considerably lower GF/LF ratio (0.94 and 0.92 vs. 1.12 and 1.09 for the dominant and non-dominant hand, respectively) and higher median correlation coefficients (0.94 and 0.95 vs. 0.90 and 0.93) in our present set of data. Note also that in addition to improved accuracy of recording GF and LF, the currently employed method also allowed for recording the horizontal deviation of LF as an important index of task performance.
Finally, we tested bimanual task, which allowed for recording the forces exerted by both hands from a single trial. Nevertheless, since both uni- and bimanual manipulations are represented in our everyday behavior, future studies could evaluate the studied effects in uni-manual tasks as well.
Effects of change in LF direction
The elaborate coordination of GF and LF is well known to gradually deteriorate when the tested tasks become more complex, such as when frequency of shaking a hand-held object increases, or when asymmetric actions of another hand/arm are required (Flanagan and Wing 1995; Serrien and Wiesendanger 2001a, b; Zatsiorsky et al. 2005). Similarly, if a change from exerting LF in one to exerting it in two directions was considered as another way to make the same manipulation task more complex, one could expect the indices of force coordination to gradually deteriorate with an increase in IB. However, the results strongly suggest existence of two distinctive control patterns. It appears that whenever the manipulation task requires exerting even a remarkably low and transient force in the opposite direction from the “main direction” of LF exertion (such as in IB = 25% trials), the pattern of force control switches from an exceptionally high level of GF and LF coordination to a moderate one. As a result, it appears that for the bidirectional control pattern to emerge it does not matter whether the LF profile is “slightly bidirectional” (i.e. IB = 25%) or “fully bidirectional” (IB = 100%).
To avoid a potentially confounding effect of different peak LF forces, we manipulated IB by keeping the pulling up force (i.e., F Z upper) constant, while gradually increasing the pushing down force (F Z lower). Therefore, one could assume that, in addition to change in IB, the associated increase of the rate of LF change could explain a part of the observed phenomenon. However, there are at least two arguments against that assumption. The first one is based on the already discussed discrete change in most of the indices of GF and LF coordination recorded when the unidirectional trial turns into a bidirectional one with the lowest IB. The second argument originates from our recent finding stressing possible differences in force coordination between the static and dynamic manipulation tasks (Jaric et al. 2006). Namely, opposite to the findings observed from free moving objects (Flanagan and Wing 1995; Zatsiorsky et al. 2005), even a five-fold increase in the rate of LF change left the indices of GF and LF virtually unchanged. Nevertheless, manipulation of both the pulling up and pushing down LF in the way to keep the interval between them constant could deserve attention of future studies.
Here we can only speculate on the neural mechanisms responsible for the observed phenomenon. A plausible explanation could be provided on the basis of muscle synergies (see Introduction for details). Specifically, if establishing muscle synergies is a necessary condition for highly coordinated actions of GF and LF, that process is likely to require certain transient time to be conducted. Recent data obtained from joint actions of both various postural muscles and individual fingers strongly speak in favor of this assumption (Domkin et al. 2002; Krishnamoorthy et al. 2003). Consequently, the consecutive transitions between alternating synergies established between the GF muscles and two antagonistic LF muscle groups in a task that requires exerting force in opposite directions (no matter how low and brief LF in one direction may be) should result in deteriorated GF and LF coordination.
An alternative interpretation could be based on the well-documented role of skin receptors in GF and LF coordination (Johansson and Westling 1984, 1987b; Westling and Johansson 1987; Ohki and Johansson 1999; Nowak et al. 2002a). Specifically, instead of switching the synergies between GF and two antagonistic LF muscle groups, changes in the pattern of the afferent firing of skin receptors associated with the changes in LF direction could provide a similar effect. Therefore, we believe that one of the directions of future research could be aimed towards discriminating the possible effects of muscle action from the effect of afferent cutaneous signals not only in the studied phenomenon, but also in GF and LF coordination in general.
Effect of hand dominance
Another potentially important finding of the present study is the effect of hand dominance on the studied force coordination. Since the task was based on exerting the prescribed vertical LF bimanually, we could not compare the accuracy of two hands. However, we found that the dominant hand tended to contribute to the total force more than the non-dominant, but only in unidirectional trials. Whereas a contribution of the presumably stronger hand (e.g., 10 out of 14 subjects demonstrated stronger GF of their dominant hand) could be considered as expected under the given experimental conditions, the lack of the same finding in the bidirectional trials seems hard to explain. However, two additional findings revealed presumably interpretable mechanical advantages of the non-dominant over the dominant hand in performing the tested manipulation task. First, although the recorded 2.4% lower GF/LF ratio of the non-dominant hand (averaged across the subjects and trials) failed to reach the level of significance (the effect proved to be significant in our previous study (Ferrand and Jaric 2006)), the same hand showed higher GF modulation. Second, the non-dominant hand also revealed a lower LF horizontal deviation. From the functional aspect, the former finding could be interpreted as a sign of higher GF and LF coordination of the non-dominant hand that provides a stable GF/LF ratio (see Introduction for details), while the later one suggests that the same hand is more accurate in providing directionally accurate reaction forces (e.g. needed to preserve postures, or react to external perturbation).
Regarding the general interpretation of the observed findings, it seems that the most of the former and contemporary ideas regarding the limb/hemisphere differences cannot be used as starting points. For example, the recorded advantages of the non-dominant hand clearly contradict the classic view of handedness as a one-dimensional trait. From the other side, the proposed specialization of the dominant and non-dominant limb for the open-loop and closed-loop control, respectively (see Introduction for details), not only failed to be consistently supported by literature, but also can hardly be applied to the tested task. Specifically, although the subjects received a visual feedback regarding the exerted force, due to the rapid changes of LF they were unable to apply on-line corrections (see our earlier studies for details; Jaric et al. 2006; Marwaha et al. 2006). Therefore, the tested task cannot be considered as closed-loop controlled, which could explain the observed advantages of the non-dominant arm. However, we believe that our findings could be viewed as an addition to the model of motor lateralization recently proposed by Sainburg and co-workers (Sainburg 2002, 2005). According to the authors, while the dominant limb/hemisphere is expected to be specialized for controlling limb trajectory, the non-dominant one could be specialized for control of limb position. Due to the static nature of the tested task, our data suggest that in addition to the specialization for the sensory feedback mediated error correction mechanisms (Bagesteiro and Sainburg 2003) and the limb position in general (Sainburg 2005), the non-dominant limb/hemisphere could also be specialized in controlling static exertion of forces. In particular, the ability to accurately exert LF in required direction, as well as to modulate GF with respect to the changes of LF could be a trait of the non-dominant hand when manipulating static objects. Nevertheless, it should be stressed that the static manipulation conditions allowed for a relatively large deviation of LF in the horizontal direction, which possibly made the tasks less “directional” than they were expected to be. This could be a confounding factor that needs to be addressed in future studies.
Conclusions
In this study we explored the mainly neglected effects of change in LF direction and hand dominance on force coordination in a static manipulation task. Regarding the effect of change in LF direction, we conclude that two distinct patterns of GF and LF could exist. Specifically, whenever a transient change in LF direction occurs while manipulating a hand-held object, the elaborate GF and LF coordination deteriorates. A plausible explanation of the recorded phenomenon could be based on switching synergies among different muscle groups involved in the tested bidirectional trials. Regarding the effect of handedness, the non-dominant hand demonstrated both a higher GF modulation and a higher accuracy in controlling the direction of LF. We speculated that due to the static nature of the tested task, the revealed advantage of the non-dominant arm could be viewed as an addition to the current views of the non-dominant arm/hemisphere advantage in controlling limb position.
Several aspects of the studied phenomena deserve further research. For example, it remains possible that, instead of muscle synergies, the change in activity of cutaneous receptors could be responsible for the changes in the GF and LF coordination pattern associated with the change in LF direction. More generally, one could ask whether the muscle synergies or sensory information are more important for skilled object manipulation. Second, interaction between contralateral limbs while performing bimanual actions has been well documented (c.f., Swinnen et al. 1991). Therefore, studying the role of handedness under uni-manual manipulation conditions could also deserve attention of researchers. Third, the effect of handedness on GF and LF coordination under dynamic conditions (e.g., free movements of a hand-held object) has not been studied yet. Since the dominant limb has already demonstrated its advantage in controlling trajectories, it remains possible that both the higher directional accuracy and higher GF modulation we recorded remain to be a general advantage of the non-dominant limb only under static conditions.
References
Augurelle AS, Penta M, White O, Thonnard JL (2003) The effects of a change in gravity on the dynamics of prehension. Exp Brain Res 148:533–540
Augurelle AS, Smith AM, Lejeune T, Thonnard JL (2003) Importance of cutaneous feedback in maintaining a secure grip during manipulation of hand-held objects. J Neurophysiol 89:665–671
Bagesteiro LB, Sainburg RL (2002) Handedness: dominant arm advantages in control of limb dynamics. J Neurophysiol 88:2408–2421
Bagesteiro LB, Sainburg RL (2003) Nondominant arm advantages in load compensation during rapid elbow joint movements. J Neurophysiol 90:1503–1513
Cole KJ, Abbs JH (1988) Grip force adjustments evoked by load force perturbations of a grasped object. J Neurophysiol 60:1513–1522
Domkin D, Laczko J, Jaric S, Johansson H, Latash ML (2002) Structure of joint variability in bimanual pointing tasks. Exp Brain Res 143:11–23
Duque J, Thonnard JL, Vandermeeren Y, Sebire G, Cosnard G, Olivier E (2003) Correlation between impaired dexterity and corticospinal tract dysgenesis in congenital hemiplegia. Brain 126:732–747
Fellows SJ, Noth J, Schwarz M (1998) Precision grip and Parkinson’s disease. Brain 121(Pt 9):1771–1784
Ferrand L, Jaric S (2006) Force coordination in static bimanual manipulation: effect of handedness. Motor Control 10:359–370
Flanagan JR, Wing AM (1993) Modulation of grip force with load force during point-to-point arm movements. Exp Brain Res 95:131–143
Flanagan JR, Wing AM (1995) The stability of precision grip forces during cyclic arm movements with a hand-held load. Exp Brain Res 105:455–464
Flanagan JR, Wing AM (1997) The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci 17:1519–1528
Flanagan JR, Tresilian J, Wing AM (1993) Coupling of grip force and load force during arm movements with grasped objects. Neurosci Lett 152:53–56
Flanagan JR, Burstedt MK, Johansson RS (1999) Control of fingertip forces in multidigit manipulation. J Neurophysiol 81:1706–1717
Freitas PB Jr, Krishnan V, Jaric S (2007) Elaborate force coordination of precision grip could be generalized to bimanual grasping techniques. Neurosci Lett 412:179–184
Gysin P, Kaminski TR, Gordon AM (2003) Coordination of fingertip forces in object transport during locomotion. Exp Brain Res 149:371–379
Jaric S, Knight CA, Collins JJ, Marwaha R (2005a) Evaluation of a method for bimanual testing coordination of hand grip and load forces under isometric conditions. J Electromyogr Kinesiol 15:556–563
Jaric S, Russell EM, Collins JJ, Marwaha R (2005b) Coordination of hand grip and load forces in uni- and bidirectional static force production tasks. Neurosci Lett 381:51–56
Jaric S, Collins JJ, Marwaha R, Russell E (2006) Interlimb and within limb force coordination in static bimanual manipulation task. Exp Brain Res 168:88–97
Johansson RS (1998) Sensory input and control of grip. Novartis Found Symp 218:45–59; discussion 59–63
Johansson RS, Westling G (1984) Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp Brain Res 56:550–564
Johansson RS, Westling G (1987) Signals in tactile afferents from the fingers eliciting adaptive motor responses during precision grip. Exp Brain Res 66:141–154
Johansson RS, Westling G (1987) Significance of cutaneous input for precise hand movements. Electroencephalogr Clin Neurophysiol Suppl 39:53–57
Johansson RS, Westling G (1988) Programmed and triggered actions to rapid load changes during precision grip. Exp Brain Res 71:72–86
Johansson RS, Riso R, Hager C, Backstrom L (1992) Somatosensory control of precision grip during unpredictable pulling loads. I. Changes in load force amplitude. Exp Brain Res 89:181–191
Krishnamoorthy V, Latash ML, Scholz JP, Zatsiorsky VM (2003) Muscle synergies during shifts of the center of pressure by standing persons. Exp Brain Res 152:281–292
Latash ML, Danion F, Scholz JF, Zatsiorsky VM, Schoner G (2003) Approaches to analysis of handwriting as a task of coordinating a redundant motor system. Hum Mov Sci 22:153–171
Li ZM, Latash ML, Zatsiorsky VM (1998) Force sharing among fingers as a model of the redundancy problem. Exp Brain Res 119:276–286
Marwaha R, Hall SJ, Knight CA, Jaric S (2006) Load and grip force coordination in static bimanual manipulation tasks in multiple sclerosis. Motor Control 10:160–177
Nowak DA, Hermsdorfer J, Glasauer S, Philipp J, Meyer L, Mai N (2001) The effects of digital anaesthesia on predictive grip force adjustments during vertical movements of a grasped object. Eur J Neurosci 14:756–762
Nowak DA, Glasauer S, Meyer L, Mait N, Hermsdorfer J (2002) The role of cutaneous feedback for anticipatory grip force adjustments during object movements and externally imposed variation of the direction of gravity. Somatosens Mot Res 19:49–60
Nowak DA, Hermsdorfer J, Marquardt C, Fuchs HH (2002) Grip and load force coupling during discrete vertical arm movements with a grasped object in cerebellar atrophy. Exp Brain Res 145:28–39
Nowak DA, Hermsdorfer J, Topka H (2003) Deficits of predictive grip force control during object manipulation in acute stroke. J Neurol 250:850–860
Ohki Y, Johansson RS (1999) Sensorimotor interactions between pairs of fingers in bimanual and unimanual manipulative tasks. Exp Brain Res 127:43–53
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9:97–113
Paulignan Y, Dufosse M, Hugon M, Massion J (1989) Acquisition of co-ordination between posture and movement in a bimanual task. Exp Brain Res 77:337–348
Rost K, Nowak DA, Timmann D, Hermsdorfer J (2005) Preserved and impaired aspects of predictive grip force control in cerebellar patients. Clin Neurophysiol 116:1405–1414
Sainburg RL (2002) Evidence for a dynamic-dominance hypothesis of handedness. Exp Brain Res 142:241–258
Sainburg RL (2005) Handedness: differential specializations for control of trajectory and position. Exerc Sport Sci Rev 33:206–213
Serrien DJ, Wiesendanger M (1999) Grip-load force coordination in cerebellar patients. Exp Brain Res 128:76–80
Serrien DJ, Wiesendanger M (2001) Dissociation of grip/load-force coupling during a bimanual manipulative assignment. Exp Brain Res 136:417–420
Serrien DJ, Wiesendanger M (2001) Regulation of grasping forces during bimanual in-phase and anti-phase coordination. Neuropsychologia 39:1379–1384
Serrien DJ, Burgunder JM, Wiesendanger M (2002) Control of manipulative forces during unimanual and bimanual tasks in patients with Huntington’s disease. Exp Brain Res 143:328–334
Swinnen SP, Young DE, Walter CB, Serrien DJ (1991) Control of asymmetrical bimanual movements. Exp Brain Res 85:163–173
Westling G, Johansson RS (1984a) Factors influencing the force control during precision grip. Exp Brain Res 53:277–284
Westling G, Johansson RS (1984b) Factors influencing the force control during precision grip. Exp Brain Res 53:277–284
Westling G, Johansson RS (1987) Responses in glabrous skin mechanoreceptors during precision grip in humans. Exp Brain Res 66:128–140
Zatsiorsky VM, Gao F, Latash ML (2005) Motor control goes beyond physics: differential effects of gravity and inertia on finger forces during manipulation of hand-held objects. Exp Brain Res 162:300–308
Acknowledgments
The study was supported in part by grant HD-48481 from the National Institute of Health to S. Jaric. P. de Freitas has been partly supported by Fulbright Program (#15053184) and the Brazilian Government through the Coordination for the Training and Improvement of Higher Education Personnel (CAPES #2051-04/4)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
de Freitas, P.B., Krishnan, V. & Jaric, S. Force coordination in static manipulation tasks: effects of the change in direction and handedness. Exp Brain Res 183, 487–497 (2007). https://doi.org/10.1007/s00221-007-1064-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-007-1064-3