
Abstract
Although the development of upright posture has received considerable attention, the quiet stance of infants in their first months of learning this fundamental behavior has not been well studied. The purpose of the present study was to characterize the time evolutionary properties, or temporal organization, of these infants’ unperturbed upright stance as well as to elucidate how somatosensory information influences that organization. Six healthy, full-term infants were tested monthly from walk onset until 9 months of independent walking experience while standing either independently or touching a static surface. The structure of sway was assessed through stabilogram-diffusion analysis using an exponential Ornstein-Uhlenbeck characterization. The results of this analysis revealed two new insights into postural development. First, the developmental changes in quiet stance involved a decreased rate at which sway decays to maximal variance, rather than an attenuation of the magnitude of that variance. Specifically, measures indexing amount of sway variance were significantly reduced when touching a static surface as compared with an independent stance condition, but revealed no change with increased walking experience. Further, a reduction in the average rate constant of decay indicated an increased influence of long time-scale sway corrections on the overall sway trajectory. Second, it was shown that, at early walk ages, the use of touch both reduced the amount of variance and shifted the rate constant of sway towards longer time-scale displacements. Taken in the context of previous research, these results support our conclusion that early postural development embodies the dual tasks of calibrating sensorimotor relations for estimation of self-motion as well as identification and tuning of control system properties.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Approximately 1 month before walking onset, human infants can independently maintain bipedal stance (Bayley 1993). Over the next year, the control of both independent stance and locomotion undergo marked change (Barela et al. 1999; Clark and Phillips 1993; Ledebt and Bril 2000; Metcalfe and Clark 2000; Sveistrup and Woollacott 1996). Much of what is known about postural development during this period has been revealed with paradigms involving discrete mechanical (e.g., Forssberg and Nashner 1982; Sveistrup and Woollacott 1996) or sensory (e.g., Foster et al. 1996; Lee and Aronson 1974; Stoffregen et al. 1987) perturbations. While providing valuable information regarding compensatory postural responses, studies from such paradigms offer few insights into the continuous sensorimotor control involved in sustained epochs of unperturbed stance. Characterizing the time evolutionary properties, or temporal organization, of unperturbed sway has become a critical first step towards understanding the nature of sensorimotor control in adults (Collins and De Luca 1993; Kiemel et al. 2002; Zatsiorsky and Duarte 2000) and thus is an appropriate entry point for understanding sources of change in postural development (Newell 1998). The purpose of the current study, therefore, was to characterize changes in the temporal organization of infant posture during the first year of independent walking.
To date, there have been no empirical studies focusing on changes in the control of unperturbed independent stance during infancy. However, comparisons of toddlers (2–3 years of age) with older children and adults have indicated that postural development involves a reduction of the overall variance of sway (Newell 1998; Newell et al. 1997; Riach and Hayes 1987). Further, by examining the regularity of sway patterns (using a measure of approximate entropy), Newell and colleagues suggested an age-related increase in structural complexity that accompanied the decreasing sway variance (see Newell 1998 for a review). The interpretation of these findings was that postural development involves learning to incorporate an increased number of independent degrees of freedom (e.g., body segments, joints) in the task of maintaining upright stance. A second explanation was put forward by McCollum and Leen (1989), who, using an inverted pendulum model, predicted that postural development in infants should involve a changing temporal structure that would be revealed by an increased time constant. An increased time constant reflects a reduced average rate of displacement from an upright equilibrium position and thus should also appear as a decrease in mean sway frequency. According to these investigators, and others (Adolph 2002), developmental changes in such a mechanical characterization should result from changing anthropomorphic constraints of the infant’s body (e.g., height, body proportions) as well as modifications of control strategies to incorporate a greater number of degrees of freedom to expand the permissible sway region. There have yet to be any studies of infant posture that provide empirical data to support or refute these hypothesized types of change. More importantly, this knowledge gap leaves little room for understanding the nature and sources of developmental change in the sensorimotor control of posture.
Recent work on the sensorimotor control of posture in adults suggests avenues of investigation that may provide new insights into the development of upright stance. For example, adult participants who lightly (<1 N) touch a stationary surface with their fingertip while standing quietly show a dramatic attenuation of sway variance without modifying the rate constants that describe their pattern of sway displacements (Kiemel et al. 2002). Similar results were obtained by Riley and colleagues (1997), who, using a non-rigid touch surface, found haptic influences on the magnitude of sway variance without a corresponding change in the critical time used to distinguish short versus long time-scale control regimes. According to Kiemel et al. (2002), such results may be interpreted as touch enhancing sensory estimates of self-motion without modifying control parameters of the postural system such as stiffness and damping.
For infants just beginning to stand upright, however, it is questionable whether touch information is integrated with the control of quiet stance in the same manner as it is for adults. For example, a longitudinal study of the relationship between hand contact and body sway (Barela et al. 1999) revealed that the use of touch for informational purposes emerges during the first months following the transition to independent locomotion. This finding suggests that walking experience facilitates the development of the ability to use touch information for estimation of self-motion. Further, in a follow-up cross-sectional study of infants with 1–12 months of walking experience (Metcalfe and Clark 2000), a reduction in sway variance was found when infants touched a static surface that afforded a limited amount of mechanical support. These investigators also revealed a concurrent reduction in the correlation between displacements of upper and lower body segments (i.e., medial–lateral head vs approximate center of mass movements) while touching as compared with the correlations observed during the same task performed without touch. The reduced correlations were interpreted as the infants capitalizing on the stability provided by touch to facilitate exploration of their postural coordination. However, this decreased intersegmental coordination may also indicate an effect of touch on total body stiffness, that is, a reduction in the muscular co-contractions typically seen in newly standing infants (see also Sveistrup and Woollacott 1996). An extension from these results is that touch may have an influence on control system parameters in addition to enhancing feedback information for estimation of self-motion. The potential for a joint influence of somatosensory information on both estimation and control processes in infants, where this has not been suggested in adults, provides an open window for investigating sources of change in postural development.
To address these issues in infants, we looked to the advances brought about by the past decade of research in adult postural control, with specific reference to studies focusing on unperturbed quiet stance. In particular, Collins and De Luca (1993) developed a method known as stabilogram-diffusion analysis (SDA) that allows the characterization of the temporal organization of unperturbed stance under a variety of sensory manipulations. Using SDA, it was suggested that adult postural sway is best characterized as a stochastic process as opposed to an instance of deterministic chaos, indicating long-range correlations between past and future sway displacements (Collins and De Luca 1994). Further, the implications of the time-evolving structure revealed through SDA, as well as other analytic techniques (e.g., Lestienne and Gurfinkel 1988; Zatsiorsky and Duarte 2000), have led to more than a decade of debate regarding potential control architectures for upright stance (Chow et al. 1999; Collins and De Luca 1993; Dijkstra 2000; Kiemel et al. 2002; Peterka 2000). As such, the use of an approach that focuses on characterizing the temporal organization of sway provides an important first step towards the ultimate goal of understanding sources of change in postural development.
The focus of this study, therefore, was to characterize the temporal organization of infant postural sway in a quiet stance task during the first year of independent walking. Using the method of SDA combined with a touch manipulation, namely, hand contact with a stationary surface, we sought to describe the time evolutionary properties of unperturbed infant sway, the influence of touch on those properties, and the nature of changes associated with increased walking experience. Specifically, this analysis was designed to test the two hypothesized types of change: whether the expected decrease in sway variance can be demonstrated during this period of early postural development and, further, whether the theoretical prediction of an increased time constant can be validated empirically.
Materials and method
The data analyzed in this study were collected as part of a larger longitudinal study that was designed to fully characterize the development of sensorimotor integration in infant posture. The current analysis focuses only on characterizing the time evolutionary properties of quiet stance while the infants were standing either independently or touching a stationary surface. Thus, only the procedures relevant to this analysis are presented in detail. A summary of the full experimental protocol is provided to describe the overall context within which these data were obtained, and the remaining data and procedures are presented elsewhere (cf. Metcalfe et al. 2004).
Participants
Six infants (three female and three male; including three Caucasian, one African-American, and two Asian infants) were included in this analysis. All infants were healthy, full-term, and without developmental delay as validated by the Bayley Scales of Infant Development, 2nd edition (Bayley 1993) at 6, 9, and 12 months of age. Infants entered the study when they were able to sit independently (mean age 6.14±0.86 months) and were tested monthly until they reached 9 months of independent walking experience or approximately 20 months of chronological age, as the mean age at walk onset was 10.97±1.22 months. For the purpose of this investigation, the infant’s posture was assessed only at ages when they could maintain upright stance independently: specifically, from walk onset onward. Each infant’s caregiver provided written informed consent prior to inclusion in the longitudinal protocol and a small payment was given to the caregiver at the end of each laboratory visit. The Institutional Review Board at the University of Maryland approved all experimental procedures for this study.
Apparatus
The data were remotely acquired using a National Instruments A/D board (BNC-2090) and custom LabView software (National Instruments Inc.; Austin, TX). All signals were sampled at 50.33 Hz in real time and synchronized to a manual trigger at trial onset. Figure 1 illustrates the experimental set-up wherein each participant stood on a pedestal in a parallel stance with eyes open either independently (hands free) or touching a stationary surface.

An infant standing on the small pedestal in a hands free condition. To the right is the instrumented touch apparatus. Behind the infant is the Logitech receiver and the small triangles on the infant’s torso are transmitters for the six-dimensional position tracking system. The caregiver and second experimenter are excluded for simplicity of presentation
Touch apparatus
An instrumented contact surface, mounted on a support frame, was positioned to the right of each infant, at the approximate level of the iliac crest (as illustrated in Fig. 1). This was composed of a 4.4-cm-diameter convex surface that was formed by the top half of a 45.7-cm-long PVC tube. The purpose of this surface was to be “touchable” without being “graspable” by the infants. The contact surface was attached atop two support columns, each instrumented with force transducers (Interface MB-10; Scottsdale, AZ) for resolving applied hand contact forces.
Postural sway
Center of pressure in the medial–lateral (CPML) and anterior–posterior (CPAP) directions were calculated from ground reaction forces measured by a force platform (Kistler 9261A). Three-dimensional shoulder girdle and approximate center of mass displacements were sampled using a Logitech six-dimensional position tracking system (VR Depot; Boony Doon, CA), but are not reported in this analysis.
Video
All testing sessions were displayed on a remote monitor and video taped with a standard sVHS recorder (Panasonic AG-7350) for online observation of trials during acquisition as well as later behavioral coding. The video tape records were synchronized with the analog data using an event synchronization unit (PEAK Performance Technologies; Englewood, CO) and time-stamped with an SMPTE code generator (Horita RM-50 II; Mission Veijo, CA).
Design and procedure
Upon entering the laboratory, the infant was provided a few minutes to become acclimated to the testing environment and experimenters. During this time, an experimenter questioned the child’s caregiver about the infant’s health and developmental progress. Following the acclimation period, the infant was taken to a small testing room (2.1 m × 5.5 m) that was enclosed by heavy black curtains and was introduced to a small pedestal (10 cm deep × 20 cm long × 11 cm tall) to the left of the touch apparatus and affixed to the force platform. The height of the pedestal was determined through pilot testing as sufficient to discourage infants from attempting to walk during testing, but did not interfere with their willingness to stand independently. The infant’s shoes were removed and, once the infant had been placed on the pedestal, the two Logitech trackers were affixed and the position of the touch apparatus was adjusted such that the infant’s arm was abducted approximately 45° and the hand was held at the approximate height of the iliac crest.
During the testing session, the infant completed five conditions including: independent stance (without touch), touching a stationary surface, and three conditions of touching a surface that was oscillating in the medial–lateral direction (frequencies = 0.1, 0.3, and 0.5 Hz; amplitudes = 1.6, 0.59, and 0.36 cm, respectively). Three trials were collected in each condition and each trial lasted 60 s, with the exception of the 0.1-Hz trials, which were 90 s. The 15 trials were presented in a randomized order with the exception that the independent stance condition never occurred within the first five trials. This is based on previous experience with this paradigm, which has shown that infants tend not to participate in touch conditions when independent stance trials are presented first. One to three short breaks were taken between trials when needed and the total testing session lasted for 25–50 min, depending on the infant.
This analysis focused only on the conditions in which the infants (1) stood independently and (2) touched the stationary surface. Figure 1 demonstrates the general task in the independent stance condition. To facilitate participation, an experimenter sat in front of the infant and attempted to maintain his or her attention with a variety of toys or books. The caregiver was always present and helped prepare the infant for each trial as well as prevent possible falls. To ensure that the infant performed the appropriate touch condition, a second experimenter was positioned to the infant’s right and monitored hand contact with the touch apparatus.
Data reduction, measures, and analysis
Behavioral coding and signal processing
Following data acquisition, all trials were independently examined for valid segments of quiet posture by two trained coders. For all conditions, criteria for valid segments were: (1) standing independently from the caregiver and experimenters, (2) no dancing or bouncing movements, (3) no falling or stepping movements, and (4) minimum length of 10 s. Additionally, touch had to be appropriate for the experimental condition; that is, continuously touching but not grabbing the contact surface in the touch condition and hands completely free in the independent stance condition. Small head/trunk movements (i.e., turning) and upper-limb movements (i.e., pointing) that did not disrupt the performance of the task were considered as valid postural data and were not excluded. However, any movements resulting in a disruption, such as a complete turn and lean toward the caregiver or experimenter (effectively, self-generated perturbations), were completely excluded from further analyses. Coders were instructed to record start and end times of segments to the nearest second and these times were assessed by a third experimenter. Only those segments that were in complete agreement (overlapping times) were used in subsequent analyses.
Once segments of quiet stance had been determined, they were extracted from the raw files using an interactive data extraction program. Prior to further analysis, the mean was removed from each segment and these data were subsequently low-pass filtered using a recursive second-order Butterworth filter (f 3db =5 Hz). To account for edge effects of filtering, 0.75 s (~38 samples) of data was removed from each end of all segments. As a final criterion, because the amount of time is an important variable in the computation of the parameters describing the time evolutionary properties of sway, only the ages and conditions for which there was a minimum of 20 s of valid data after signal processing were included in further analyses. A summary of descriptive stance time variables is presented in the Results section. All data extraction, signal processing, and reduction were performed using custom software written in MATLAB, v. 6.0 (Mathworks, Inc; Natick, MA).
Task measures
Vertical touch force
Mean vertical touch force (TFV) was used as a global index of the extent to which infants were using the touch apparatus for mechanical support. Reduction of the raw touch force signal included removal of analog spikes (i.e., data points exceeding four within-trial standard deviations from the mean were reduced to the perimeter of that range) followed by low-pass filtering with a recursive second-order Butterworth filter (f 3db =5 Hz). Absolute TFV was then calculated in units of Newtons as the mean touch force during the segment minus a baseline that was determined when the infant’s hand was not on the touch apparatus in the same trial. TFV was calculated for 60% of the static touch trials with valid postural data because some of the infants never removed their hands from the contact surface in a given trial and thus had no valid baseline. As continuous contact was a criterion for valid segments in the touch condition, baseline data were never included in the segments analyzed for the touch condition. The values for TFV that were subjected to statistical analysis were evenly distributed across infants and walk ages (infants χ25=0.36; walk age χ29=0.29, both p>0.9).
Stance time measures
To provide general indices of standing performance, two measures of stance duration were assessed. Mean segment time (MST) was the time elapsed during a segment selected by two independent coders as quiet stance (see “Behavioral coding and signal processing”, above) and was chosen as a measure of how long an infant would perform a single epoch of unperturbed standing. To examine the cumulative amount of time spent standing in a given testing session, the MSTs for all analyzed segments (independent stance, static touch) were summed within condition and represented as total stance time (TST). Both measures were computed in units of seconds.
Stabilogram-diffusion analysis
In the current study, we applied stabilogram-diffusion analysis (SDA) to the problem of characterizing longitudinal change in the temporal organization of infant postural sway. While a number of methods have been proposed to explore the time evolutionary properties of posture, we chose SDA primarily because of the short data segments that are typically obtained from infants. Specifically, because SDA relies on averaging and does not require stationary time-series, it is possible to record multiple short data segments and obtain repeatable estimates of parameters that describe the time evolutionary properties of sway.
The stabilogram-diffusion function
Stabilogram-diffusion functions (SDFs) were computed on CPML and CPAP displacements for each data segment as described in previous work (Collins and De Luca 1993; Newell et al. 1997; Riley et al. 1997). Specifically, the diffusion coefficient at a particular time-increment (dτ) was defined as the average squared displacement between all data points (X t ) separated by the length of time τ in seconds. By computing d across a range of values of τ, one obtains a diffusion function for a single-component time-series. Explicitly,
where τ=0, 0.02,..., 10 s and the values for X t and Xt+τ are individual samples in the time-series of sway (the angled brackets denote averaging across all samples separated in time by τ). Thus, as shown in Eq. 1, the diffusion function represents the mean squared displacement, or variance, between current and future CP positions as a function of increasing time separation. Within both CPML and CPAP, the SDFs were computed as the mean of the individual diffusion functions from each data segment. Because the length of the data segments varied owing to behavioral coding, a weighting procedure was used to compute the averaged SDFs as follows:
where i=1, 2,..., m, with m being the number of data segments. The weighting factor, nτ(i), was the number of data points used to compute the value of dτ for the ith data segment. A two-dimensional resultant (SDFRES) was determined as the sum of the SDFs computed on the individual CPML and CPAP sway components (SDFRES=SDFML+SDFAP). Because previous literature (Collins and De Luca 1993) as well as preliminary analyses indicated that this resultant provides the most stable estimates, we restrict our attention to the SDFRES through the remainder of this presentation. Therefore, one infant with all conditions and testing days from walk onset to 9 months post-walking would contribute 20 SDFs for computation of the parameters describing the time evolutionary properties of their sway.
Characterizing the structure of the SDF
While computation of the SDF is straightforward, there has been considerable debate regarding the extraction of parameters that describe its shape (Chiari et al. 2000; Delignières et al. 2003; Newell et al. 1997; Riley et al. 1998; Peterka 2000). One of the main points of contention has been that the original characterization developed by Collins and DeLuca (1993), which involved the piecewise fitting of two discrete linear segments to the SDF, implied discontinuities in the control of stance where continuous characterizations could provide more parsimonious explanations of the observed structure (Chiari et al. 2000; Newell et al. 1997; Peterka 2000). To date, however, the selection of a given approach has been based largely on conceptual reasons with few direct comparisons between continuous and piecewise methods. When comparisons have been made (Chiari et al. 2000; Newell et al. 1997), authors have concluded in favor of the continuous characterization.
In the current study, we chose to use a continuous characterization of the SDF. Specifically, we fit the infant SDFs with an exponential function representing the time-evolving variance of the linear, first-order Ornstein-Uhlenbeck process advocated by Newell et al. (1997). Our selection of this approach was based on both conceptual and empirical reasons. Conceptually, this procedure was preferred because it is derived from a continuous dynamic modelFootnote 1 that explicitly accounts for both stochastic and deterministic influences on sway displacements as they unfold in time. More importantly, it provides a parsimonious means of testing the two hypothesized types of change in the development of stance control; that is, decreased variance and/or an increased time constant. Empirically, our selection was based in a comparison of both piecewise linear and exponential methods on these same data. In this comparison, we did not find strong qualitative or quantitative evidence for the preference of either method as a means of characterizing the shape of the SDFs and, in addition, we observed the same pattern of statistical results for touch condition and walk age (see Appendix) with both methods. With the knowledge that the pattern of results held regardless of analytic method and that both methods provided similar descriptions of the SDF, we chose to proceed with the continuous approach on the basis of interpretability.
For this characterization, an exponential function (Newell et al. 1997) of the form
was fit using a Nelder-Mead direct search algorithm (function fminsearch.m; Matlab, v. 6.0, Matworks, Inc.; Natick, MA). In this equation, the averaged diffusion function \( \overline{d} _{\tau } \) is predicted to increase exponentially as a function of both time interval (τ) and a rate constant denoted as k. This rate constant represents an average time-scale over which the sway trajectory decays towards maximal variance between present and future states and reflects similar changes as the previously discussed time constant (McCollum and Leen 1989). That is, either an increased time constant or a decreased rate constant would reflect an increased influence of relatively long time-scale displacements on the overall structure of the time-series of sway. The diffusion coefficient, D, is related to the amount of noise contributing to each incremental displacement on the sway trajectory. The ratio D/2k is the expected value of the SDF as τ approaches infinity and, because the SDF represents the growth of variance (mean squared displacement; Eq. 1) over increasing time intervals, D/2k represents the maximal variance in the time-series.
Statistical analysis
All hypothesis tests were conducted using linear mixed-model analysis of variance and covariance techniques (Proc Mixed; SAS, version 8.02; Cary, NC). This method was selected because it differentially accounts for fixed (e.g., experimental manipulations) and random (e.g., among- and within-subject) sources of variation as well as provides tools to control variance heterogeneity and correlated measures. This method also allows for random patterns of missing cells and thus is well suited for analysis of longitudinal data where missing values occur. The analysis proceeded in two general steps which involved (1) the selection of an appropriate statistical model followed by (2) the application of the selected mixed-model to linear regression.
In the first step, the initial model included Walk Age represented in monthly intervals (the interval of data acquisition), Condition (independent stance, static touch) and their interaction as class level fixed effects. Random effects were specified as Infant and the Infant × Walk Age and Infant × Condition interactions, thus controlling for among- and within-subject sources of variation. Subsequently, more complex models were assessed wherein subsets of random effects parameters as well as different covariance structures were used to account for variance heterogeneity and correlated measures amongst levels of the independent variables (Walk Age and Condition). Using a goodness-of-fit statistic, the Bayesian Information Criterion (BIC; Gagne and Dayton 2002; Schwarz 1978), these various models were compared with one another and the best overall statistical model was selected for use in the regression analysis. Residuals were pooled within subject and condition when the BIC indicated that it was appropriate to do so.
With the variance–covariance structure and random effects parameters selected in the first step, a regression model was constructed to more precisely examine individual developmental change as a continuous function of Walk Age represented in days from walk onset, rather than months of data acquisition. In this step, a procedure similar to backwards selection was used to determine which fixed effects parameters (Walk Age, Condition and Walk Age × Condition) were most strongly related to the dependent variables. For all variables, second-order functions of Walk Age were also considered; however, with the exception of one dependent variable (total stance time, see below), no second-order trends reached significance.
The dependent variables for this analysis included: (1) measures of stance duration: mean segment time, MST, and total stance time, TST; (2) measures of sway variance: the diffusion coefficient, D, and maximal variance, D/2k; and (3) the rate constant, k. For the measures of sway variance, because the residuals of prediction scaled with the range of observations, all values were transformed with a natural logarithm prior to statistical analysis. Finally, because vertical touch force (TFV) was recorded only in the static touch condition, it was analyzed only as a function of Walk Age in days. All hypothesis tests were conducted using α=0.05 as the nominal level of statistical significance. Throughout the remaining presentation, main effects for Condition are presented as means ± standard errors and effects for Walk Age are discussed as regression effects (slopes ± standard errors).
Results
Task measures
Vertical touch force
TFV was included as a global index of the extent to which the infants applied force to the contact surface for mechanical support. A regression model that included Walk Age as the only fixed effect revealed no significant change in TFV (F(1, 25.6)=0.06, p>0.5). Across all infants and walk ages for which TFV was computed, an average of 3.81±0.23 N of downward force was applied in the static touch condition.
Stance time measures
Of the measures of quiet stance duration (mean segment time, MST; total stance time, TST), significant effects were only observed for TST. Specifically, the final regression included significant first-order (F(1, 50.3)=15.81, p<0.001) and second-order (F(1, 46.9)=12.66, p<0.001) terms for Walk Age, but no significant effect for Condition. With increasing Walk Age, there was a concurrent linear increase in TST at a rate of 0.67±0.17 s/day. However, this rate slowed with increased walking experience as indicated by the significant second-order term of −0.002±0.001 s/day2, resulting in a downward curvilinear trend in TST across Walk Age. Table 1 provides descriptive statistics for TST pooled across condition and within each level of Walk Age in months. From this table it can be seen that, with the exception of the month of walk onset (walk age = 0 months), the amount of time used for computation of the SDFs ranged from 82 to 121 s with a mean of 98.99±4.41 s. For MST, data segments averaged 28.37±1.14 s and ranged from 12.99 to 58.12 s. By means of comparison, the amount of postural data used in previous SDA investigations has varied from 15-s trials and 45 s of total stance time (Newell et al. 1997) to 90-s trials (Collins and De Luca 1994, 1995) and 500 s of total stance time (Chiari et al. 2000). Thus, while the difficulties inherent in studying infant postural control impose important constraints on the amount of data that can be obtained, both the MST and TST durations from this study are within the range of what has previously been used to estimate diffusion parameters.
Stabilogram-diffusion analysis
Exemplar SDFs along with the exponential fits are presented in Fig. 2. These SDFs were computed on the same infant at 1 month (36 days; A, B) and 9 months (288 days; C, D) of walking age in both independent stance and static touch conditions. These exemplars have been provided as a demonstration of how the three parameters (D, D/2k, and k) characterize the shape of the SDF. First, one will note that the amount of variance (based on the height of the “plateau” in the SDF) in the independent stance condition (left column) is approximately twice that corresponding to the static touch condition (right column). This scaling is reflected both in the diffusion coefficient (D), which provides an index of the amount of variance per unit time, as well as in the maximal variance (D/2k) in the infant’s postural sway, both of which indicate a reduction of sway variance in the touch condition. Second, the rate constant (k) provides an index of the rate of change as the SDF decays towards maximal variance. Because of the subtlety of differences in this rate constant, the gray shaded regions have been provided for illustration. Of these four exemplars, the SDF for the independent stance condition at 1 month (Fig. 2A) appears to increase more sharply (more narrow gray region) than the others, reflecting an interaction between touch condition and walking experience.

Exemplar stabilogram-diffusion functions (SDFs) computed on one infant at 1 month (A, B) and 9 months (C, D) of walking age. Independent stance condition is plotted on the left (A, C) and static touch is on the right (B, D). The solid line is the averaged SDFRES (\( \overline{d} \)) and the dashed line is the exponential fit; both are plotted as a function of the time interval (τ) in seconds. Insets for each plot list the parameters determined through the exponential fitting procedure
Measures of sway variance
Mixed-model regression analysis of the log-transformed diffusion coefficient (D), representing the amount of noise contributing to each successive sway displacement, revealed a significant effect for Condition (F(1, 14.3)=143.59, p<0.001) but not Walk Age. When the infants touched the stationary surface, the diffusion coefficient was significantly attenuated. In the independent stance condition, the untransformed mean value for D was 855.00±81.43 mm2/s as compared with 329.25±81.84 mm2/s in the static touch condition. Similar to the diffusion coefficient, the log-transformed representation of maximal sway variance (D/2k) tended to decrease across Condition, but showed no trends across Walk Age. In the independent stance condition, the untransformed mean value for D/2k was 502.09±70.70 mm2 whereas in the static touch condition it was 418.88±70.77 mm2. However, this trend was non-significant (F(1, 4.97)=5.38, p=0.068).
Rate constant
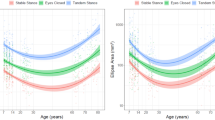
For the estimated rate constant (k), the mixed-model regression revealed significant effects for Condition (F(1, 21)=22.58, p<0.001), Walk Age (F(1, 33.8)=19.67, p<0.001) and the Condition × Walk Age interaction (F(1, 24.1)=6.11, p<0.03). Figure 3 illustrates that this interaction was due to a significant decrease in the rate constant in the independent stance condition (Fig. 3A) at −0.003±0.001 s−1/day (t(33.8)=−4.44, p<0.001) while no change was observed in the static touch condition (Fig. 3B). The mean rate constant in the static touch condition remained at 0.69±0.11 s−1 across all walk ages, a value that was equivalent to that observed in the independent stance condition at 9 months of walking experience.

Illustration of main effects for the rate constant, k, in the independent stance (A) and static touch (B) conditions plotted as a function of Walk Age in days. Dashed lines indicate regression estimates from the linear mixed-model analysis. Separate markers (★, ▼, ▲, ◆, ■, ●) indicate within-subject data corresponding to each individual infant
Finally, because the estimation of the SDF can be influenced by the amount of data used and because there was a significant change in TST over the range of walk ages observed, we performed a regression analysis of k that included TST as a possible predictor variable. This analysis revealed a nearly identical pattern of results for Walk Age (p<0.001), Condition (p<0.001) and Walk Age × Condition (p<0.02) as presented above, but provided no evidence for an influence of TST on k (F(1, 89.2)=1.17, p>0.2).
Discussion
Stabilogram-diffusion analysis was used to characterize changes in the temporal organization of infant postural sway during the first year of independent walking experience. The present evidence indicates that early developmental change in continuous epochs of quiet stance involves decreasing the rate constant of sway rather than a progressive attenuation of sway variance. Further, the use of a static contact surface led to a fundamentally different pattern of results than is typically observed in adults. That is, while in adults it has been shown that touch leads to attenuation of variance without changing rate constants, here it was shown that hand contact with a static surface influenced both the variance and the average rate constant in infants. Taken in the context of previous research, these results support our conclusion that the early acquisition and refinement of postural control embodies changes in the control system as well as calibration of sensorimotor relations for estimation of self-motion.
Sway variance: amount vs structure
Based on previous reports in the literature, two types of change in infant posture were expected: a reduced amount of variance and/or an increased time constant (reduced rate constant). The data examined in this study suggest that during the first year of independent walking, infants change the rate constant of their sway with no detectable change in the magnitude of variance. Specifically, a strong reduction in the rate constant was observed for the independent stance condition, indicating a slowed progression towards maximal variance between current and future postural states. In the language of Collins and De Luca (1993), this would be interpreted as increased “memory” in the postural control system with increased walking experience. Another way of discussing this, however, is to consider what a reduced rate constant means. That is, a reduced rate constant indicates a slowed initial rise of the SDF (Fig. 2), which means that less variance is accounted for in the initial portion of the SDF where the time-scale of sway displacements is relatively short. A reduction in the rate constant thus indicates a shift towards an increased proportion of sway variance accounted for by displacements occurring at relatively longer time-scales. This suggests that, for unperturbed independent standing, infants are learning to make less frequent postural corrections with increased walking experience.
The interesting implication of an increased influence of longer time-scale displacements comes from a robust finding in the adult literature of two major components of the postural trajectory. It has been well established that adult postural sway is well characterized on at least two time-scales including a slowly drifting mean position upon which rapid oscillations are superimposed (cf. Collins and De Luca 1993; Kiemel et al. 2002; Lestienne and Gurfinkel 1988; Zatsiorsky and Duarte 2000). The slower of these two components tends to dominate the amount of sway variance in adults and has commonly been attributed to processes involving the estimation of an internal model or a desired reference position based on the current system state (Kiemel et al. 2002; Lestienne and Gurfinkel 1988; Zatsiorsky and Duarte 2000). The faster oscillations around the slowly drifting mean, on the other hand, have been interpreted as corrective actions akin to a damped oscillatory feedback control process. The extension of this in reference to the current study is that early postural control may be characterized by a stronger influence of relatively rapid corrections, indicating a primacy of short time-scale feedback control. However, with increased walking experience, infants may be learning to use sensory information to more precisely estimate an internal model specifying their body position in space and thus rely less on short time-scale feedback for the maintenance of stability—a suggestion that we have put forward in previous studies (Barela et al. 1999; Metcalfe and Clark 2000; Metcalfe et al. 2004).
The influence of a static contact surface
The second major finding was that, unlike in adults, touching a static surface influenced both the amount of variance and the rate constant of sway at younger walk ages. As already discussed, it is known that touch attenuates the sway variance of adults and infants (e.g., Jeka and Lackner 1994; Metcalfe and Clark 2000). The interpretation of this result for adults has typically been that haptic contact facilitates estimation of self-motion through enhanced somatosensory feedback (Jeka and Lackner 1994) and, in particular, improved quality of sensory information regarding sway velocity (Kiemel et al. 2002; Oie et al. 2002). Further, studies examining the influence of touch manipulations on the temporal organization of adult sway have shown that the additional information changed neither the rate constants that described the pattern of sway displacements (Kiemel et al. 2002) nor the critical time used to distinguish short versus long time-scale control regimes (Riley et al. 1997). A mechanistic interpretation of this pattern of results has been that the system control parameters, such as stiffness and damping, were the determinants of the underlying rate constants of sway whereas changes in sway variance were due to enhancement of sensory estimates of self-motion.
In the current study, however, when infants with the least walking experience touched the static surface, shifts in the rate constant were observed, indicating an overlapping influence of touch and walking experience on the temporal organization of stance. Specifically, for these infants, in addition to a dramatic effect on amount of variance, touch also lengthened the amount of time (reduced rate) of decay towards maximal sway variance. The interpretation of the reduced rate constant with touch at early walking ages is that the use of the static surface led to a change consistent with modifications in the parameters of the control system (i.e., stiffness, damping). Further support for this interpretation comes from the study of Metcalfe and Clark (2000) in which, with the use of a static contact surface, infants reduced the correlations between upper and lower body segments, which might have been due to reduced overall body stiffness.
Of course, that the infants reduced their rate constant with the use of a touch surface is interesting, particularly because this does not happen with adults. However, the more difficult question is what such a pattern of results means for postural development. Previous studies have suggested that the development of posture involves a calibration or “mapping” (Bertenthal et al. 1997) of sensory information to motor action. Indeed, this is consistent with the notion that changes in sway variance with touch are due to enhancement of sensory information for estimation of self-motion. However, a quandary arises when one considers that touch has not been shown to influence the rate constants of sway in adults (Kiemel et al. 2002), but did have such an effect on the infants in the current study. These data call into question either (1) the hypothesis derived from the adult literature, that touch does not influence system control parameters, or (2) the hypothesis derived from the developmental literature, that ontogenetic change in postural control is restricted to sensory “calibration” without considering the necessity of identification and tuning of the properties of the neuromuscular control system.
Because it has been shown that, with walking experience, infants refine the timing and sequencing of muscular activation in response to postural perturbations (Forssberg and Nashner 1982; Sveistrup and Woollacott 1996) and modify their postural behavior in response to altered dynamic and static sensory contexts (Barela et al. 1999; Bertenthal et al. 1997; Delorme et al. 1989; Metcalfe and Clark 2000), and that some of these changes imply improvements in estimation of self-motion (Barela et al. 1999; Metcalfe et al. 2004), we suggest that it is the developmental hypothesis that should be reconsidered. Explicitly, it is an incomplete explanation to assume that the development of posture is only a process of calibrating sensorimotor relations. This is because the developmental state of the effector system (e.g., growth, strength) imposes constraints on the ability to form a stable internal model. It is plausible that, during early postural development, sensory information has parallel roles in identification and tuning of neuromuscular (control) system properties as well as calibration or “mapping” sensation with motor action [see Adolph (2002) and Metta et al. (1999) for a similar discussion].
Conclusion
Overall, this study reveals two new insights into the development of unperturbed quiet standing. First, developmental change is shown in the rate constant, rather than the amount of variance, of unperturbed postural sway. Further, the reduced rate constant implies an increasing influence of long time-scale sway corrections on overall sway trajectory and is consistent with the hypothesis of a developing ability to estimate self-motion (Barela et al. 1999; Metcalfe and Clark 2000; Metcalfe et al. 2004). Second, at early walk ages, the use of the touch surface serves to attenuate sway variance and, unlike in adults, shift the temporal structure of sway displacements towards an increasing influence of long time-scale corrections. The results observed at the youngest walk ages replicate our previous finding that relatively low-level touch forces are sufficient to attenuate sway as early as the onset of walking (Metcalfe and Clark 2000). Such an effect can be attributed, at least in part, to somatosensory information enhancing estimates of self-motion. Further, this study extends the understanding of somatosensory contributions in that touch appears to have an additional role involving identification and tuning of system control parameters during the first year of independent walking experience.
Notes
The first-order Ornstein-Uhlenbeck process is defined by the linear stochastic differential equation \( {x}'_{t} = - kx_{t} + {\sqrt D }\xi _{t} \). The deterministic part of this model specifies a stabilizing influence on velocity \( {\left( {{x}'} \right)} \) at each time step as an inverse proportion of current position (-kx t ). The stochastic influence is characterized by white noise (ξ t ) that is scaled by the square root of the diffusion coefficient (\( {\sqrt D }\xi _{t} \)), representing variance or noise at each time step.
To reduce the computational load, the algorithm proceeded in four passes through progressively focused portions of the SDF. On the first pass, a relatively large step size (SS; 20 samples) was used to find the general region around the possible inflection point (poss. infl. ± SS). On subsequent passes, SS was reduced (10, 5, 1) and the procedure was again performed using values within the smaller region of the SDF for the fitting of the two separate lines. The final value of T c was the one determined using SS=1.
References
Adolph KE (2002) Learning to keep balance. In: Kail R (ed) Advances in child development and behavior. Elsevier Science, Amsterdam, pp 1–40
Barela JA, Jeka JJ, Clark JE (1999) The use of somatosensory information during the acquisition of independent upright stance. Infant Behav Dev 22:87–102
Bayley N (1993) Bayley scales of infant development. The psychological corporation, San Antonio, TX
Bertenthal BI, Rose JL, Bai DL (1997) Perception–action coupling in the development of visual control of posture. J Exp Psychol Hum Percept Perform 23:1631–1643
Chiari L, Cappello A, Lenzi D, Della CU (2000) An improved technique for the extraction of stochastic parameters from stabilograms. Gait Posture 12:225–234
Chow CC, Lauk M, Collins JJ (1999) The dynamics of quasi-static posture control. Hum Mov Sci 18:725–740
Clark JE, Phillips SJ (1993) A longitudinal study of intralimb coordination in the first year of independent walking: a dynamical systems analysis. Child Dev 64:1143–1157
Collins JJ, De Luca CJ (1993) Open-loop and closed-loop control of posture: a random-walk analysis of center-of-pressure trajectories. Exp Brain Res 95:308–318
Collins JJ, De Luca CJ (1994) Random walking during quiet standing. Phys Rev Lett 73:764–767
Collins JJ, De Luca CJ (1995) Upright, correlated random walks: a statistical-biomechanics approach to the human postural control system. Chaos 5:57–63
Delignières D, Deschamps T, Legros A, Caillou N (2003) A methodological note on nonlinear time series analysis: Is the open- and closed-loop model of Collins and De Luca (1993) a statistical artifact? J Mot Behav 35:86–96
Delorme A, Frigon J, Lagacé C (1989) Infants’ reactions to visual movement of the environment. Perception 18:667–673
Dijkstra TMH (2000) A gentle introduction to the dynamic set-point model of human postural control during perturbed stance. Hum Mov Sci 19:567–595
Forssberg H, Nashner LM (1982) Ontogenetic development of postural control in man: adaptation to altered support and visual conditions during stance. J Neurosci 2:545–552
Foster EC, Sveistrup H, Woollacott MH (1996) Transitions in visual proprioception: a cross-sectional developmental study of the effect of visual flow on postural control. J Mot Behav 28:101–112
Gagne P, Dayton CM (2002) Best regression using information criteria. J Modern Statistical Methods 1:479–488
Jeka JJ, Lackner JR (1994) Fingertip contact influences human postural control. Exp Brain Res 100:495–502
Kiemel T, Oie KS, Jeka JJ (2002) Multisensory fusion and the stochastic structure of postural sway. Biol Cybern 87:262–277
Ledebt A, Bril B (2000) Acquisition of upper body stability during walking in toddlers. Dev Psychobiol 36:311–324
Lee DN, Aronson E (1974) Visual proprioceptive control of standing in human infants. Percept Psychophys 15:529–532
Lestienne FG, Gurfinkel VS (1988) Postural control in weightlessness: a dual process underlying adaptation to an unusual environment. Trends Neurosci 11:359–363
McCollum G, Leen TK (1989) Form and exploration of mechanical stability limits in erect stance. J Mot Behav 21:225–244
Metcalfe JS, Clark JE (2000) Somatosensory information affords the exploration of posture in newly walking infants and toddlers. Infant Behav Dev 23:391–405
Metcalfe JS, McDowell K, Chang T-Y, Chen LC, Jeka JJ, Clark JE (2004) The development of somatosensory-motor integration: an event-related analysis of infant posture in the first year of independent walking. Dev Psychobiol (in press)
Metta G, Sandini G, Konczak J (1999) A developmental approach to visually-guided reaching in artificial systems. Neural Netw 12:1413–1427
Newell KM (1998) Degrees of freedom and the development of postural center of pressure profiles. In: Newell KM, Molenaar PCM (eds) Applications of nonlinear dynamics to developmental process modeling. Lawrence Erlbaum, Mahwah, N.J., pp 63–84
Newell KM, Slobounov SM, Slobounova ES, Molenaar PC (1997) Stochastic processes in postural center-of-pressure profiles. Exp Brain Res 113:158–164
Oie KS, Kiemel T, Jeka JJ (2002) Multisensory fusion: simultaneous re-weighting of vision and touch for the control of human posture. Cognit Brain Res 14:164–176
Peterka RJ (2000) Postural control model interpretation of stabilogram diffusion analysis. Biol Cybern 82:335–343
Riach CL, Hayes KC (1987) Maturation of postural sway in young children. Dev Med Child Neurol 29:650–658
Riley MA, Wong S, Mitra S, Turvey MT (1997) Common effects of touch and vision on postural parameters. Exp Brain Res 117:165–170
Riley MA, Balasubramaniam R, Mitra S, Turvey MT (1998) Visual influences on center of pressure dynamics in upright posture. Ecological Psychol 10:65–91
Schwarz G (1978) Estimating the dimension of a model. Ann Stat 6:461–464
Stoffregen TA, Schmuckler MA, Gibson EJ (1987) Use of central and peripheral optical flow in stance and locomotion in young walkers. Perception 16:113–119
Sveistrup H, Woollacott MH (1996) Longitudinal development of the automatic postural response in infants. J Mot Behav 28:58–70
Zatsiorsky VM, Duarte M (2000) Rambling and trembling in quiet standing. Mot Control 4:185–200
Acknowledgements
This research was supported by National Science Foundation Grant #9905315 (J. Clark). Portions of this research were presented at the annual meetings of the North American Society for the Psychology of Sport and Physical Activity (NASPSPA) in Baltimore, MD, 2002 and Savannah, GA, 2003 and the International Conference on Infant Studies, Chicago, IL, 2004.
The authors wish to thank Tim Kiemel for discussions regarding mathematical implications and applications of SDA methods, Larry Douglass for guidance on the statistical analysis and all of our research assistants who helped collect and code the data included in this paper. Finally, we wish to express special gratitude to the parents and infants who gave willingly of their time and effort throughout the duration of this study.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
As there has been some controversy regarding the appropriate method for characterizing the shape of the SDF, both piecewise linear (Collins and De Luca 1993; Riley et al. 1997) and exponential (Newell et al. 1997) methods were assessed. For this comparison, we chose to assess the two methods in three ways. First, as has been done previously (Newell et al. 1997), we performed a qualitative analysis of how well each method fit the shape of the SDF by using the proportion of variance explained (R2). Second, to determine whether differences in the R2 were due to a differing number of parameters required to describe the shape of the SDF, we used a goodness-of-fit statistic (Bayesian Information Criterion; BIC) that explicitly penalizes more highly parameterized models. Finally, we examined the statistical pattern of results from each method with respect to the dependent variables in this study (touch condition and walk age) to assess the sensitivity of each for detecting the effects of interest. In what follows, we first summarize how the piecewise linear (PWL) method was applied and then present the PWL results in comparison with the exponential (EXP) procedure, which was computed as described in the Materials and method section.
For the PWL method, two segments were used, providing measures of effective stochastic activity, or variance, as the half-slopes of the first (D1) and second (D2) portions of the linear fit. The point of inflection between the two linear regions, denoted as critical time T c , served as a measure of the average time constant indicating the point at which the SDF begins to plateau at maximal variance. A difference between our method and that previously employed lies in the way in which T c was determined. In original applications of this technique, the linear fits were typically constrained such that T c was found at small values of τ (<~1.5 s). Because infant posture has not been as well characterized as adult posture, we developed an algorithm (described in the next paragraph) for determination of the point of inflection that considered a majority of the values of τ as possible locations of T c .
To ensure that there were always enough data points available to fit each region of the PWL model, small portions at each end of the SDF were not considered as possible locations of T c . The first possible point of inflection was determined by differentiating the SDF into its velocity signal and then taking the first peak. The last possible point of inflection was set at τ=9 s, leaving 50 points for fitting the second region. Within the remaining portion of the SDF, the algorithm proceeded iteratively by computing PWL fits using each valueFootnote 2 of τ as a possible inflection point. Two lines were fit on each iteration, one from 0 to τ and another from τto 10 s, and the point where the two lines intersected served as the inflection point. Because the SDF always begins at zero (d0=0), the initial intercept was fixed at zero and only the slope was estimated for the first linear segment. Both slope and intercept for the second segment were free to vary. To assess which combination of segments produced the best fit, a single line was created by concatenating the two individual lines at the inflection point and then the residual mean squared error was computed against the SDF. The PWL fit with the lowest mean squared error was taken as the best piecewise representation of the SDF.
As found by Newell et al. (1997), both methods explained a relatively high proportion of the variance in the SDF, with little difference (~2%) between the two. For the PWL method, an overall average R2 of 0.89±0.01 (mean±SE) was observed, as compared with 0.87±0.01 for the EXP method. While these values are lower than those reported by Newell et al. (1997) (~0.96–0.98 for PWL and ~0.91–0.94 for the EXP), this was not unexpected given the variability inherent in shorter segments of infant postural data.
To determine whether the slightly better fits with the PWL method were due to a larger number of parameters, we also compared the two methods using the BIC. When using the BIC, the standard approach is to select the method producing the lower value. As such, we compared the two methods by subtracting the BIC values computed on the PWL fits from those computed with the EXP method (BICDIFF = BICEXP−BICPWL). Thus, when BICDIFF was positive, the PWL model was preferred. The mean BICDIFF was small and positive (BICDIFF=85±43), suggesting that the better fits were not necessarily due to higher parameterization in the PWL method. However, a two-tail t test indicated that this difference, although closely approaching significance, was marginally different from zero (t(95)=1.98, p=0.051).
Finally, to assess the sensitivity of both methods for detecting the effects of interest in this study, we compared the pattern of statistical significance across analogous measures. The noise term, D, from the EXP method was compared with D1 from the PWL method, since both are related to the initial slope of the SDF. The representation of maximal variance from the EXP method (D/2k) was compared with the intercept of the second linear segment (D 2 int) from the PWL fit and the rate constant (k) was compared with the PWL critical time (T c ). For this last comparison, the reciprocal of T c was used in order to compare the two parameters in the same units (s−1). Table 2 summarizes the results of this comparison as discussed in the Materials and method section.
Rights and permissions
About this article
Cite this article
Metcalfe, J.S., Chen, LC., Chang, TY. et al. The temporal organization of posture changes during the first year of independent walking. Exp Brain Res 161, 405–416 (2005). https://doi.org/10.1007/s00221-004-2082-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-004-2082-z