
Abstract
We used the uncontrolled manifold (UCM) approach to study the synergy formation during learning an unusual multi-finger task. The subjects produced accurate force ramps with challenging sets of four fingers (two per hand). We tested hypotheses on stabilization of the contributions of subsets of effectors to the task force (F TASK) and to the moment in the frontal plane (force-stabilization and moment-stabilization, respectively). Force signals were used to compute magnitudes of hypothetical independent signals, modes. The variance of the mode magnitudes across repetitions of the task was partitioned into two components, within the UCM (V UCM), which did not affect the average value of a selected performance variable (force or moment), and orthogonal to the UCM (V ORT), which affected the variable. Prior to practice, subjects showed high error indices and failed to show stabilization of each hand’s contribution to F TASK (V ORT≥V UCM), while the pronation-supination moment was stabilized by the fingers of each hand (V ORT<V UCM). The total forces produced by each of the two hands showed negative covariation across trials, which supported the force-stabilization hypothesis but not moment-stabilization hypothesis. Both force-stabilization and moment-stabilization hypotheses were supported by analysis of mode magnitudes to all eight fingers. Over 2 days of practice, the performance of the subjects improved considerably. This was accompanied by the emergence of within-a-hand force-stabilization for each of the two hands without deterioration of moment-stabilization. Quantitatively better within-a-hand force-stabilization was seen in male subjects as compared to females throughout the course of the experiment. Force-stabilization by all eight fingers improved quantitatively with practice. Practice also resulted in higher finger forces in maximal force production (MVC) trials and higher forces produced by unintended fingers in single-finger MVC trials (higher enslaving). We conclude that the UCM approach allows quantifying changes in the coordination of effectors during practice, and offers insights into the microstructure of this coordination with respect to different performance variables and different subsets of effectors. The approach can be used to test whether new synergies emerge in the process of practice.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The human motor system is notoriously redundant: The central nervous system (CNS) is confronted with a problem of selecting a solution from the apparent abundance of available solutions each time it generates a voluntary movement (Bernstein 1967; Turvey 1990). Gelfand and Tsetlin (1967) suggested that this problem may be solved by uniting elements of the neuromotor system into task-specific flexible structural units frequently addressed as synergies. Following this suggestion, an uncontrolled manifold (UCM) approach has been developed. It suggests that successful task performance is achieved not by selecting a single optimal solution, but by stabilizing certain combinations of elemental variables relevant to the task (Scholz and Schöner 1999; Scholz et al. 2002; reviewed in Latash et al. 2002c).
According to the UCM approach, the controller acts in a state space of independent elemental variables and selects in that space a sub-space (a manifold, UCM) corresponding to a value of a performance variable that needs to be stabilized. Then, it arranges covariations among the elemental variables such that their variance has relatively little effect on the selected performance variable, i.e. it is mostly confined to the UCM. If several attempts at a task are analyzed, variance of the elemental variables across the attempts can be partitioned into two components, within the UCM and orthogonal to it. If the elemental variables are indeed organized into a synergy stabilizing that performance variable, their variance orthogonal to the UCM is expected to be significantly smaller as compared to the variance within the UCM. As such, the UCM approach allows us to quantify synergies, for example as a particular relation between the variance within and orthogonal to the UCM (e.g., Scholz et al. 2003).
The UCM approach offers an opportunity to look into the process of formation of synergies during practice. There has been only one study that used this method to quantify changes in the structure of variance in the joint space during learning a two-hand pointing task when one hand moved the pointer and the other hand moved the target (Domkin et al. 2002). The study resulted in a somewhat surprising finding: After practice, the subjects showed a bigger reduction in the component of variance within the UCM, computed with respect to the distance between the pointer and the target, than in the variance component orthogonal to the UCM. In other words, subjects mostly reduced variance in the joint space that did not affect the important variable. Domkin and his colleagues suggested that this unexpected result was a consequence of overpracticing the task such that the subjects could not optimize further their performance of the task and reduced the apparently irrelevant variance for other reasons, not explicitly controlled in the study.
In another recent study, effects of a single session of practice on within-a-hand finger coordination during a three-finger ramp force production task have been reported (Latash et al. 2003). That study, however, did not use the UCM method but analyzed changes in the variances of individual finger forces and in the total force. It demonstrated a significant improvement in the multi-finger coordination during the first 100 trials followed by a further drop in the individual finger variances that was not accompanied by a drop in the variance of the total force, somewhat reminiscent of the mentioned findings by Domkin et al. (2002).
The present study is based on a series of experiments that used the UCM approach to analyze force and moment stabilization by a set of fingers within a hand (Latash et al. 2001, 2002b; Scholz et al. 2002). To have ample room for improvement in the course of practice, we designed an unusual multi-finger task and used the UCM approach to quantify the development of a multi-finger synergy. Our subjects were required to produce accurate force ramps with sets of four fingers (two per hand) that proved to be particularly challenging during pilot tests. The task was further complicated by a set of constraints that did not allow subjects “to cheat”, for example to press with all eight fingers or to press with only some of the explicitly involved fingers. We hypothesized that prior to practice the subjects would fail to show multi-finger UCM effects, i.e. relatively more variance within the UCM than orthogonal to it. Such effects were expected to emerge in the course of practice. UCM effects were studied with respect to two performance variables, the total force (an explicit component of the task) and the total moment produced by sets of fingers with respect to a midpoint between the two most lateral fingers. The latter can be viewed as an implicit task component since its stabilization has been shown in a variety of multi-finger tasks (Latash et al. 2001, 2002b). The analysis of force and moment stabilization by several subsets of effectors has allowed us to trace changes in the between-hands and within-a-hand finger interactions that occurred with practice.
Materials and methods
Subjects
Twelve healthy participants, six males and six females, took part in the experiment. Three male and three female subjects were right-handed, and the rest were left-handed, according to their preferential hand use during writing and eating. The average age of the participants was 23.4±1.1 years, the average weight was 62.4±2 kg, and their average height was 167.3±2.2 cm. The purpose of the study and involved procedures were explained to the participants according to protocols approved by the Office for Regulatory Compliance of the Pennsylvania State University. Participants were compensated for their participation in the study.
Apparatus
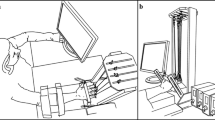
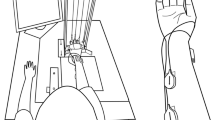
Eight unidirectional piezoelectric force sensors (model 208AO3; Piezotronic Inc.), with a diameter of 1.5 cm, were used to measure forces produced by each individual finger of both hands. Each sensor, covered with a cotton pad, was mounted on an aluminum post. Four units were placed within an aluminum frame (140 mm × 90 mm each) in a groove on a wooden board, assuring the stable position of the sensors. The sensors were medio-laterally distributed 30 mm apart within each frame. The position of the frames and sensors could be adjusted for differences in arm length, hand size and finger length. A custom-fitted support object was placed underneath each participant’s palm to provide support and assure a stable position of the hand with respect to the sensors (Fig. 1).

Illustration of the setup
During testing, the participant sat at the table in a comfortable position, with the upper arm at approximately 45° of abduction in the frontal plane and 45° of flexion in the sagittal plane, and the elbow at approximately 45° of flexion. The forearms rested on the board containing the sensors, and were strapped to the board with sets of Velcro straps. The midline of the wooden board was aligned with the midline of the participant’s body, and the positions of the hands were symmetrical with respect to the body midline. The subjects were also allowed to select comfortable positions of the thumbs. These positions were marked and reproduced throughout the experiment.
The surface electromyogram (EMG) of the finger flexor muscles and finger extensor muscles was recorded with bipolar electrodes (10 mm diameter, silver-silver chloride, 20 mm apart center-to-center) that were placed over the muscle bellies. The electrodes were placed according to Basmajian and Blumenstein (1989). For the flexor muscles, electrodes were centered around the 50% point on the line joining the medial epicondyle to the styloid process of the ulna. These electrodes measured the summed activity of the flexor digitorum profundus (FDP) and flexor digitorum superficialis (FDS). For the extensor muscles, electrodes were centered around the 25% point on a line drawn from the lateral epicondyle to the styloid process of the ulna. These electrodes measured the activity of the extensor digitorum communis (EDC). The surface EMG signals were amplified (×3,000) and band-pass filtered (10–500 Hz).
Analog output signals from the sensors were connected to separate AC/DC signal conditioners (Model 484B06; Piezotronic) and fed into a Gateway 450 MHz microcomputer. The data were collected at 1,000 Hz with a 12-bit resolution using National Instruments A/D board and LabView-based data acquisition software. Force traces were shown on-line on the monitor, located approximately 50 cm in front of the participant.
Procedures
The study involved a Pre-Test (day 1), 2 days of practice (days 2 and 3), and a Post-Test (day 4). The Pre-Test and Post-Tests consisted each of three major parts:
-
1.
Maximal force production (maximal voluntary contraction, MVC), with each individual finger from each hand separately (I—index, M—middle, R—ring and L—little), with four fingers from each hand acting together (IMRL), and with all eight fingers from both hands acting together (MVC-8);
-
2.
One finger ramp (Ramp-1), slowly increasing force with each individual finger from each hand following a ramp template shown on the screen; and
-
3.
Four-finger Ramp (Ramp-4), slowly increasing the total force produced by a set of pre-assigned four fingers (two from each hand: I, R from the left hand and M, L from the right hand; or vice versa) following a ramp template shown on the screen. The finger combinations in the Ramp-4 task were randomly assigned to the participants, with balanced numbers of male and female subjects, and right-handers and left-handers.
Each MVC trial started with a sound signal generated by the computer, the “get ready” signal. The experimenter also reminded the participant verbally to get ready. After a delay of 2 s, a trace started to move across the screen showing the participant the force produced by the task (master) finger(s). The participants had up to 10 s to reach maximal force with the master finger(s). They were told that possible force generation by other (slave) fingers was normal, and that they should not pay attention to it as long as the master finger(s) produced maximal force. The participants were not allowed to lift fingers off the sensors at any time. For each MVC task, two trials were performed, and the data for the trial with the highest force of the master finger(s) were used.
For the Ramp-1 test, one trial was performed for each finger. The screen showed the participant a thick red line. It was horizontal, corresponding to zero force for the first 5 s. Then, it became oblique going up to 10% of the participant’s MVC-8 over 3 s. Then, it stayed horizontal for 2 more seconds.
For the Ramp-4 test, 25 trials were performed. The target line was similar to the Ramp-1 tests but its height was set at 15% of the MVC-8 for each subject. However, the signal shown on the screen corresponded to the sum of the master finger forces of both hands from which the sum of all the slave finger forces was subtracted. We are going to address this variable as the task force (F TASK). The purpose of presenting the subjects with such a complex feedback was to make the task more difficult and not to allow the subjects to perform it by pressing with all eight fingers in parallel. After each trial, a numerical score was given to the subject reflecting the total deviation of the F TASK curve from the template. The score ranged from zero (worst) to 100 (best).
The first few pilot tests revealed that the subjects could use “cheat strategies”, in particular to press mostly with only one hand or to press with only one finger per hand during the Ramp-4 trials. To avoid such possibilities, the subjects were explicitly instructed to try to share the force naturally between the hands and between the fingers within each hand. If the ratio of the forces produced by the two master fingers within a hand became smaller than 25%:75% at any moment after the first 1-s segment of the ramp, an error was detected. In such cases, a major subtraction from the total score occurred (−20 points), and the subjects were shown their actual finger force curves with the moment when one of the fingers produced over 75% of the total hand force highlighted. Similarly, if the contribution of one of the hands to F TASK exceeded 75%, an error was detected with similar feedback provided to the subject after the trial. All the subjects managed to learn to avoid penalties for violations of the 25%:75% rule by the end of the first practice day.
Participants were tested four times on consecutive days. Days 2 and 3 were used for practice. On those days, the subjects performed the same MVC tasks, and Ramp tasks. These were followed by an additional session of 25 trials at the Ramp-4 task, ending up with another set of MVC and Ramp-1 tasks. Hence, for each practice day, two sets of data were available referred to as P11 and P12 for practice day #1, and P21 and P22 for practice day #2. The participants considered the experimental procedure as a competitive computer game. They never complained of being tired. Each participant was tested and practiced at approximately the same time of the day.
Data processing
Data processing was performed off-line using MatLab software. Signals from the force sensors were used to compute the following indices:
-
1.
Peak force (MVC) was measured as the time when the sum of the forces produced by the master finger(s) reached its peak; forces of individual fingers in multi-finger tasks were measured at that time;
-
2.
Force deficit (FD): The difference between the peak force of a finger in its single-finger MVC trial (F i,i ) and its peak force in the four-finger MVC task (F i,IMRL) was expressed in percent to the former value: FDi=100%*(F i,i –F i,IMRL)/F i,i . Total force deficit across the four fingers was computed as the difference between the sum of peak forces of individual fingers in their single-finger tasks (∑F i,i ) and their combined peak force during the IMRL task expressed in percent to the former value;
-
3.
Enslaving (E): The amount of force produced by a finger “i” in a task “j” when this finger was a slave finger was computed in percent to the peak force of this finger in its single-finger MVC test: E i,j =100%*F i,j /F i,i . E-indices were further averaged across different tasks“j”;
-
4.
EMG signals were full-wave rectified and integrated (∫EMGdt) over the duration of each ramp (3 s). Further, for across subjects comparisons, the EMG integrals were normalized using integrated EMG signals over 0.5 s (∫EMGMVC dt) around the peak of the EMG signal in MVC tasks for the flexors and extensors of each hand multiplied by six to match the integration intervals: IEMG=∫EMGdt/6*∫EMGMVC dt.
UCM analysis
Individual finger forces cannot be considered independent variables because of the phenomenon of enslaving (Zatsiorsky et al. 1998). In this study, similarly to previous studies of multi-finger coordination using the UCM approach (Latash et al. 2001, 2002b; Scholz et al. 2002), we transformed the force data into another set of variables, force modes (see also Danion et al. 2002) using appropriate enslaving matrices. The enslaving matrices were computed based on the control trials (Ramp-1) with ramp force production by one finger.
For each Ramp-1 trial, we performed linear regressions of the forces produced by individual fingers and of the total force produced by all four fingers of the hand over time. The onset of the ramp and time at which 10% of MVC-8 was reached were determined. The latter value was chosen to ensure that the relations between individual finger forces and the total force were linear within the actual range of forces used in the main portion of the experiment (Ramp-4 trials). The change of total force and of each individual finger force was determined over the defined time interval. A 4-by-4 one-hand (1H) enslaving matrix (ENSL) was then constructed for each hand of each subject as follows:
where Δf j,k and ΔF k are the changes of individual finger force j (j = index (i), middle (m), ring (r), and little (l)) and the change of total force, respectively, produced during the ramp when finger k (k = i, m, r, and l) was the instructed master finger. This matrix is a linear approximation of a matrix containing partial derivatives ∂f j,k /∂F k where ∂f j,k and ∂F k are the infinitesimal changes of individual and total finger forces.
We will use a term “mode” for a hypothetical independent variable corresponding to combinations of individual finger forces observed when a person tries to press with only one finger. Relations among changes in individual finger forces within a hand are assumed to be linear within the studied range of forces (cf. Z.-M. Li et al. 1998). Column k in the ENSL 1H matrix describes a set of forces produced by individual fingers when the subject tries to produce the total force of 1 N by pressing only with finger k; i.e., it corresponds to mode-k=1 N. Multi-finger force production is going to be considered as the process of specifying magnitudes of the modes for each of the explicitly involved fingers. A set of such magnitude factors may be viewed as a vector with the dimensionality equal to the number of explicitly involved fingers; we are going to address it as the m vector. Note that the introduced modes are measured in units of force and are not identical to dimensionless “force modes” described in earlier studies of multi-finger force production based on tests with maximal force production by one finger at a time (Danion et al. 2002).
Our pilot studies have shown that little if any enslaving effects could be seen between fingers of the two hands within the studied range of finger forces. Hence a 8×8 enslaving matrix that was used to define modes in two-hand (2H) tasks was composed of two non-zero 4×4 sub-matrices corresponding to within-a-hand enslaving effects for each hand and two zero 4×4 sub-matrices reflecting the lack of visible between-hand enslaving:
where subscripts D and ND refer to the dominant and non-dominant hand respectively.
We performed eight types of analysis that addressed the following questions:
-
1.
Do covariations of mode magnitudes within the dominant hand selectively stabilize a particular (average) time profile of the total contribution to F TASK produced by the hand?
-
2.
Do covariations of mode magnitudes within the dominant hand selectively stabilize a particular (average) time profile of the total moment produced by the fingers with respect to the functional longitudinal axis of the hand (cf. Z.-M. Li et al. 1998)?
-
3.
Do covariations of mode magnitudes within the non-dominant hand selectively stabilize a particular (average) time profile of the total contribution to F TASK produced by the hand?
-
4.
Do covariations of mode magnitudes within the non-dominant hand selectively stabilize a particular (average) time profile of the total moment produced by the fingers with respect to the functional longitudinal axis of the hand?
-
5.
Do covariations of all eight mode magnitudes in both hands selectively stabilize a particular (average) time profile of the F TASK produced by the hands?
-
6.
Do covariations of all eight mode magnitudes in both hands selectively stabilize a particular (average) time profile of the total moment produced by the hands in the frontal plane with respect to the midline of the trunk (cf. S. Li et al. 2001)?
-
7.
Do covariations of total forces produced by each hand selectively stabilize a particular (average) time profile of the task force?
-
8.
Do covariations of total forces produced by each hand selectively stabilize a particular (average) time profile of the total moment produced by the hands in the frontal plane with respect to the midline of the trunk?
We are going to address the odd questions as the force-stabilization hypotheses, while the even questions are going to be addressed as moment-stabilization hypotheses. The first four questions will be addressed as single-hand hypotheses, questions (5) and (6) as eight-finger hypotheses, and questions (7) and (8) as two-hand hypotheses.
Ignoring the effects of enslaving, the following formulation of the relationship between variations in individual finger forces within a hand and changes in a selected performance variable (PV) would apply:
where d j are coefficients. For force-stabilization hypotheses, coefficients d j for the master fingers were unity, while the coefficients for the slave fingers were –1 (since their force were subtracted to produce the task force, F TASK). For the moment-stabilization hypotheses, d j corresponds to the lever arm of individual fingers with respect to the assumed axis of rotation.
The enslaving effect, however, induces a structure in the variability of individual finger forces that may be unrelated to a particular task variable. To eliminate such enslaving-induced correlations, we transform the individual finger forces into a set of mode magnitudes, m:
Change in a performance variable can now be expressed as a function of these variables:
Equation 5 is analogous to Eq. 3, but it expresses a relation of a change in a performance variable to changes in modes rather than in forces. We tested a hypothesis that different PVs corresponding to the eight questions were stabilized against fluctuations in finger forces. Each of these hypotheses accounts for one degree of freedom, so that the space of the finger forces is redundant for each hypothesis. The analysis was performed at every 5% of the force ramp, defined from the beginning to the end of the ramp. At each time, we assume that the mean value of a selected PV across all trials represented the value that the nervous system tried to stabilize. These values were calculated from the means of the individual finger forces across all task repetitions at each percent of the ramp duration. The mean values of the individual mode magnitudes constitute the reference m configurations for each interval of analysis. The linearized model accounting for effects of enslaving is described by Eq. 5.
An uncontrolled manifold (UCM) was computed in the space of the mean-free mode magnitudes. It represents combinations of mode magnitudes that are consistent with a stable value of a performance variable. The manifold is approximated linearly by the null space spanned by basis vectors, e i, solving the following equation:
For each hypothesis, there is one null space basis vector, so that the null space has one dimension. The basis, e i, of the null space was computed numerically at each recorded sample using MATLAB. The vector of individual mean-free mode magnitudes, obtained at each sample of the force ramp, was resolved into projection onto the null space:
and the component perpendicular to the null space:
where n and k are the DOFs of the m vector and the performance variable, respectively. For each of the eight hypotheses, Eqs. 5–8 were adjusted to reflect the actual performance variable (total force or total moment), the involved subset of effectors, and the enslaving matrix.
The amount of variance per DOF within the UCM was estimated as:
where \( {\left| {{\mathop f\nolimits_{{\mathbf{||}}}^{} }} \right|}^{2} \)is the squared length of the deviation vector lying within the linearized UCM.
Analogously, the amount of variance per DOF perpendicular to the UCM was estimated as:
The primary dependent variables used in subsequent analyses are \( {\mathop \sigma \nolimits_{||}^2 } \) and \( {\mathop \sigma \nolimits_ \bot ^2 } \) per degree of freedom, and are referred to, respectively, as variance per DOF within the UCM (V UCM) and orthogonal to it (V ORT). Further, a variable (ΔV) reflecting the difference between the variance within the UCM and orthogonal to the UCM was computed as:
where all variance indices are computed per degree of freedom; V TOT means the total variance (Scholz et al. 2003).
Statistics
The data are presented in the text as means and standard deviations, while figures show means and standard error bars. Repeated-measures analysis of variance (ANOVA) was performed with factors Test [Pre-Test, Practice day-1/session-1 (P11), Practice day-1/session-2 (P12), Practice day-2/session-1 (P21), Practice day-2/session-2 (P22) and Post-Test], Time (initial, middle, and final corresponding to 1-s segments of the force ramp), Hand (left and right), Gender (male and female), Handedness [dominant hand (D) and nondominant hand (ND)], Finger group (IRRight+MLLeft and MLRight+IRLeft), Fingers (task fingers and other fingers), and Variance (VUCM and VORT). Because of the large number of factors, analysis typically involved collapsing the data over some of the factors before running ANOVA. Honest significant difference (HSD) Tukey’s tests were used to further analyze significant effects.
Results
Changes in indices of within-a-hand finger interaction with practice
Indices of within-a-hand finger interaction were quantified for each hand of each subject based on the performance in the single-finger and multi-finger maximal force production trials. Prior to practice, these tests failed to show significant differences between the subject groups and between the dominant and non-dominant hands. In particular, peak forces produced by all fingers pressing together were 58.9 N (±4.3) in males and 52.1 N (±3.6) in females. In single-finger tasks, all the fingers of the hand showed force generation (enslaving). It was quantified in percent with respect to the peak force of each finger in its single-finger MVC tests using an index E described in the “Materials and methods”. On average, E was 13.5% (±4.7) in males and 16.4% (±1.9) in females. It was 14.7% (±2.7) in the dominant (D) hand and 13.5% (±2.3) in the non-dominant (ND) hand. In four-finger MVC tests, each finger showed less force than in its single-finger MVC test. This phenomenon, force deficit, was quantified using an index FD introduced in the “Materials and methods”. On average, FD was 34.4% (±3.3) in males and 28.7% (±2.3) in females.
Practice led to a significant increase in the peak force produced by the subjects. In particular, during four-finger MVC tests, the peak force increased, on average, by about 15.6% from 55.5 (±2.8) at the Pre-Test to 65.8 (±4.0) at the Post-Test. This difference was significant according to the two-way ANOVA (Test × Handedness; the main effect of Test, F (1,11)=9.56; p<0.05). These findings are illustrated in Fig. 2A for the D and ND hand separately. The data were averaged over male and female subjects because no effects of Gender were found. There were no significant effects of Hand or Handedness.

A MVC; B enslaving (E); Cforce deficit (FD) in maximal force production tests (open bars Pre-Test, black bars Post-test). Averaged across subjects data are shown with standard error bars
No significant changes in force deficit were observed as a result of practice. On average, FD dropped from 31.5% (±2.1) at the Pre-Test to 29.7% (±1.8) at the Post-Test (Fig. 2B). Practice resulted in a significant increase in the enslaving by about 25% as illustrated in Fig. 2C. On average, E increased from 14.1% (±1.8) at the Pre-Test to 18.7% (±1.8) at the Post-Test. There were no significant effects of Gender, Hand or Handedness. Figure 3A illustrates changes in the index of enslaving (E) over the practice sessions. The index was averaged across all fingers. E increased significantly with practice according to a one-way ANOVA (significant effect of Test; F (5,11)=5.45;p<0.001). Post hoc tests showed that E increased significantly from the Pre-Test to the practice sessions P12 and P22 and to the Post-Test, while the E values at P22 and Post-Test were significantly larger than at the first practice session, P11.

Averaged across subjects enslaving (E) is shown for all fingers (A) separately for the fingers that were instructed to produce force in the Ramp-4 tests (the task fingers, solid lines), and for other fingers (dashed lines) for the IR hand(B), and for the ML hand (C). Standard error bars are shown
To check whether practice led to different changes in the enslaving in fingers that were explicitly involved in the Ramp-4 test (task fingers) as compared to other fingers, E was quantified separately for those finger sets. For the IR hand, E for the task fingers (IR) was significantly lower than for the other fingers (ML) across all tests (Fig. 3B). This was confirmed by a 2-way ANOVA (Test × Fingers) that showed a significant effect of Fingers (F (1,11)=7.13; p<0.05), as well as a significant Test effect (F (5,11)=3.76; p<0.01). For the ML hand, there was an opposite tendency: The task fingers (ML) showed higher enslaving as compared to the other fingers (IR); however, this difference was not significant. There was also a significant effect of Test (F (5,11)=4.55; p<0.005; Fig. 4C). Post hoc tests showed that E in the Post-Test was significantly larger than in the Pre-Test and the first practice session (P11) for the ML hand, while E in the IR hand was higher at the last practice session (P22) than in the Pre-Test.

Normalized RMS scores dropped significantly with practice (open bars Pre-test, solid barsPost-test). These were computed for comparisons between finger groups (A), genders (B), and left- and right-handers (C). Means across subjects are shown with standard error bars
Analysis of the index of integrated muscle activity computed for the EMG signal in the extrinsic flexor and extensor muscles (IEMG, see “Materials and methods”) failed to show significant changes with practice in either muscle.
Effects of practice on the Ramp-4 test
Prior to practice, subjects showed substantial errors in the performance of the force ramp tests with sets of four fingers from the two hands, IRRight + MLLeft or MLRight + IRLeft (Ramp-4 test). Errors in their performance were quantified using root mean square (RMS) index over the time of the ramp averaged across the trials of a set. For comparisons across subjects, the RMS index was divided by their MVC in the eight-finger MVC test. White bars in Fig. 4 show such normalized RMS values averaged across subjects for the Pre-Test. There were no significant differences in the RMS values related to the finger combination used in the Ramp-4 test (Fig. 4A), gender (Fig. 4B), or hand (Fig. 4C).
Practice resulted in a significant improvement in the performance of the Ramp-4 test. On average, the RMS indices dropped by about 65%. These changes are illustrated with the open and filled bars in Fig. 4. They were significant according to the one-way ANOVA (the main effect of Test, F (1,11)=38.74;p<0.001). There were no interactions between Test and any of the other factors, suggesting that the improvement was similar in the males and females, the left and right hand, and in subjects who practiced with different finger combinations.
Uncontrolled manifold analysis of finger coordination
UCM analysis was used to address a set of hypotheses related to selective stabilization of particular performance variables by covariations of magnitudes of hypothetical independent variables (modes) to individual fingers across trials. Two performance variables were tested, the total contribution to the task force (F TASK) produced by a set of effectors (force-stabilization) and the total moment produced by the set of effectors with respect to the midpoint between the two most lateral effectors (moment-stabilization). Analysis was run separately for each hand (four effectors), for all the fingers together (eight effectors), and for two hands considered as two effectors. In the force-stabilization analysis, stabilization of F TASK was analyzed, i.e. of the force signal corresponding to the visual feedback the subjects received. As a reminder, F TASK was equal to the sum of forces produced by the explicitly involved (task) fingers minus the sum of forces produced by the other four fingers. UCM was computed for a particular hypothesis and a particular set of effectors. Then, an index ΔV reflecting the difference in the amounts of variance per degree of freedom within a UCM and orthogonal to it was computed. Positive ΔV values mean selective stabilization of the performance variable by the effectors, while negative ΔV implies destabilization of that performance variable (see Scholz et al. 2003).
Force-stabilization hypotheses prior to practice
Analysis of covariation of mode magnitudes within each hand failed to show selective stabilization of the contribution of each hand to F TASK over the whole time of the ramp. This was true for both D and ND hands. However, this result was partly due to changes in the ΔV index over the time of the force ramp. When ΔV index was quantified separately for the three 1-s segments of the ramp, there were significant differences in its magnitude over the ramp duration. Namely, for the later segments of the ramp, the value of ΔV became more positive, suggesting the emergence of force stabilization by each hand over the trial duration. Figure 5 illustrates this finding for the D (panel A) and ND hand (panel B). These observations have been confirmed with a two-way Time × Variance ANOVA that showed a significant effect of Time (F (2,11)=5.97; p<0.01 for the D hand, and F (2,11)=4.01;p<0.05 for the ND hand). Post hoc tests showed that ΔV values for the middle and final segments were significantly larger than for the initial segment for the D hand, while only the difference between ΔV values for the final and the initial segments were significant for the ND hand.

Index of finger interaction (ΔV) computed as the difference betweenV UCM andV ORT per DOF for the force-stabilization hypotheses. The index was normalized by the MVC squared for each subject and averaged over three 1-s segments of the ramp: early (open bars), middle (striped bars), and late (solid bars). Further, averages across subjects were computed; standard error bars are shown. The index was computed for the single-hand hypothesis for the dominant hand (A) and non-dominant hand (B), for the eight-finger hypothesis (C), and for the two-hand hypothesis (D)
Analysis of the data illustrated in panels A and B of Fig. 5also revealed a significant difference between the female and male subjects. In particular, female subjects showed more negative values of ΔV that never went significantly above zero, even at high forces. In contrast, ΔV for the second and third ramp segments in the males were significantly higher than zero, supported by a two-way ANOVA (significant effect of Time, F (2,11)=5.28;p<0.05; and a significant Time × Variance interaction,F (2,11)=5.28;p<0.05). Gender effects were significant according to the two-way ANOVA Gender × Time (F (1,11)=16.37; p<0.005). This analysis also confirmed the significant Time effect (F (2,11)=8.46; p<0.005). Post hoc tests showed that ΔV values for the middle and final segments were significantly larger than for the initial segment. No significant differences were found between the D and ND hand.
Analysis of the hypothesis that mode magnitudes to all fingers covaried to stabilize an average (across trials) value of F TASK (the eight-finger hypothesis, see “Materials and methods”) revealed significantly positive values of ΔV over the second and third segments of the ramp, but not over the first segment (panel C of Fig. 5). These effects were confirmed with a two-way Variance × Time ANOVA (significant effects of Variance, F (1,11)=7.91;p<0.05; and Time, F (2,11)=21.51;p<0.001). There were no differences between the male and female subjects.
Similar results were obtained when each hand was viewed as an effector contributing to F TASK (two-hand hypothesis, panel D in Fig. 5).V UCM was significantly higher than V ORT (ΔV>0) for the later segments of the ramp, implying that the contributions of the hands to F TASK covaried to stabilize the average F TASK profile. These effects were confirmed with a two-way Variance × Time ANOVA (significant effects of Variance, F (1,11) = 14.38; p<0.005; and Time, F (2,11) = 16.23; p<0.001). There were no significant differences between the female and male subjects.
Moment-stabilization hypotheses prior to practice
Mode magnitudes within each hand covaried to stabilize the total moment the fingers produced with respect to the midpoint between the I and L fingers over the whole duration of the ramp. This was reflected in positive values of ΔV for both D and ND hands (panels A and B in Fig. 6). These effects were confirmed with a two-way Time × Variance ANOVA that showed a significant effect of Variance (F (1,11)=14.71; p<0.005 for the D hand, and F (1,11)=75.29; p<0.001 for the ND hand). There was a tendency for the ΔV values to drop over the ramp duration. This effect was significant for the ND hand (F (2,11)=6.86; p<0.005; post hoc tests confirmed significantly lower ΔV values for the final segment as compared to the initial segment); and was under the level of significance for the D hand (F (2,11)=3.03, p=0.069). No significant differences were found between the female and male subjects.

Index of finger interaction (ΔV) computed as the difference betweenV UCM andV ORT per DOF for the moment-stabilization hypotheses. The index was normalized by the MVC squared for each subject and averaged over three 1-s segments of the ramp: early (open bars), middle (striped bars), and late (solid bars). Further, averages across subjects were computed; standard error bars are shown. The index was computed for the single-hand hypothesis for the dominant hand (A) and non-dominant hand (B), for the eight-finger hypothesis (C), and for the two-hand hypothesis (D)
Analysis of all eight finger forces has revealed covariation of the eight mode magnitudes that stabilized the moment produced by all the fingers with respect to the midline of the trunk. For the eight-finger moment-stabilization hypothesis, V UCM was significantly higher than V ORT (ΔV>0) for the whole ramp duration (panel C of Fig. 6). These effects were confirmed with a two-way Time × Variance ANOVA that showed a significant effect of Variance (F (1,11)=36.21; p<0.001). No significant differences across the three ramp segments or between the female and male subjects were observed.
The two-hand hypothesis showed significantly negative values of ΔV for the second and third segments of the ramp, suggesting that covariations of the forces produced by the two hands destabilized the total moment produced by these forces with respect to the midline of the trunk. This finding was not surprising because the stabilization of the total force described in the previous subsection implied a negative covariation of the hand forces, which could only destabilize the total moment. These effects were confirmed with a two-way Time × Variance ANOVA that showed a significant effect of Variance (F (1,11)=9.64; p<0.05). There was also a significant Time effect (F (2,11)=15.22; p<0.001) showing that ΔV became progressively more negative over the duration of the ramp.
Effects of practice on finger coordination in the Ramp-4 test
Force-stabilization hypotheses
Improved performance of the Ramp-4 test (described earlier and illustrated in Fig. 4) was accompanied by significant changes in the indices of finger coordination. These changes were particularly pronounced with respect to the force-stabilization hypotheses. In general, practice led to an increase in the index (ΔV) of covariation of mode magnitudes corresponding to more selective stabilization of the average profiles of force produced by different sets of effectors.
The effects of practice were particularly striking for the single-hand force-stabilization hypotheses. As described earlier, prior to practice, the subjects failed to show selective stabilization of the contribution of each hand to F TASK. Practice resulted in the emergence of such effects, i.e. the four mode magnitudes for each hand started to covary to stabilize the average contribution of the hand toF TASK. This was reflected in a significant increase in the average ΔV from the Pre-Test to the Post-Test (panels A and B in Fig. 7). The increase was confirmed by a one-way ANOVA that showed a significant effect of Test(F (5,11)=7.24; p<0.001 for the D hand; and F (5,11)=4.52; p<0.005 for the ND hand). Over all the test sessions, a two-way Gender × Test ANOVA showed a significant Gender effect, reflecting higher ΔV values in male subjects as compared to female subjects (F (1,5)=22.78, p<0.005 for the ND hand, and F (1,5)=5.60, p=0.06 for the D hand), and a significant Test effect (F (5,5)=7.19, p<0.001 for the D hand; and F (5,5)=4.40, p<0.005 for the ND hand) (Fig. 7A, B). Post hoc tests confirmed a significant increase in ΔV from the Pre-Test to all other tests (P11, P12, P21, P22 and Post-Test) for the D hand; for the ND hand, ΔV was significantly higher in the P12, P22, and Post-Test as compared to the Pre-Test.

Changes with practice of the index of finger interaction (ΔV) computed as the difference between V UCM and V ORT per DOF for the force-stabilization hypotheses. The index was normalized by the MVC squared for each subject and averaged over the whole ramp duration. Further, averages across subjects were computed; standard error bars are shown. The index was computed for the single-hand hypothesis for the dominant hand (A) and non-dominant hand(B), for the eight-finger hypothesis(C), and for the two-hand hypothesis(D) (solid lines female subjects, dashed lines male subjects). One female subject showed atypical performance in the Post-Test. The data are shown including the subject’s data (thin line) and excluding her data (thick line)
Analysis of the magnitudes at all eight modes (the eight-finger force-stabilization hypothesis) has also shown a significant improvement in the index of stabilization of the task force over practice (Fig. 7C). Comparison of the ΔV indices across all the test sessions, using a two-way Gender × Test ANOVA, showed a significant Test effect (F (5,5)=13.63; p<0.001). Post hoc tests showed that ΔV values increased from the Pre-Test to all other sessions (P11, P12, P21, P22 and Post-Test). There was also a significant Gender effect corresponding to higher ΔV values in male than in female subjects (F (1,5)=7.27; p<0.05). V UCM was significantly higher than V ORT (ΔV>0) in the Post-Test over the whole ramp duration, confirmed by a two-way Variance × Time ANOVA (main effect of Variance, F (1,11)=164.68; p<0.001). There was also a significant Time effect (F (2,11)=19.12; p<0.001) corresponding to higher ΔV values over the second and third segments of the ramp than over the initial segment.
When each hand was viewed as a single effector (two-hand hypothesis), comparisons along all the test sessions revealed no significant changes with practice in ΔV computed for the force-stabilization hypothesis (Fig. 7D). A two-way ANOVA showed no significant Gender or Test effects. At the Post-Test, the total force was stabilized over most of the ramp duration as revealed by higher V UCM values as compared to V ORT over the second and third segments of the ramp. This was confirmed by a main effect of Variance in a two-way Variance × Time ANOVA (F (1,11)=25.02; p<0.001). A significant effect of Time (F (2,11)=55.54; p<0.001) was also seen. Post hoc tests showed that the ΔV values were significantly higher in the second and third segments of the ramp as compared to the initial segment.
Moment-stabilization hypotheses
Analysis of moment-stabilization hypotheses showed relatively minor changes over the course of practice. For all analyses over sets of more than two effectors no changes in the index of moment stabilization (ΔV) were seen in contrast to the significant changes that occurred in ΔV computed with respect to the force-stabilization hypotheses.
In particular, UCM analysis of moment-stabilization by fingers of each hand separately (single-hand hypotheses) revealed no significant changes with practice (panels A and B of Fig. 8) confirmed with a two-way Test × Gender ANOVA. There were no significant differences between female and male subjects, dominant and non-dominant hand, and right and left hands. During the Post-Test, V UCM was significantly higher than V ORT for each hand throughout the whole ramp duration. This was confirmed by a two-way Variance × Time ANOVA with significant effects of both Variance (F (1,11)=5.75; p<0.05 for the D hand; and F (1,11)=19.11;p<0.005 for the ND hand) and Time (F (2,11)=19.12; p<0.001 for the D hand; and F (2,11)=6.11; p<0.01 for the ND hand). Post hoc tests showed that ΔV for the D hand was significantly higher for the middle segment of the ramp as compared to the initial one, and for the final segment as compared to either the middle or the initial segment. For the ND hand, ΔV indices for the middle and final segments of the ramp were significantly higher than for the initial segment.

Changes with practice of the index of finger interaction (ΔV) computed as the difference between V UCMand V ORT per DOF for the moment-stabilization hypotheses. The index was normalized by the MVC squared for each subject and averaged over the whole ramp duration. Further, averages across subjects were computed; standard error bars are shown. The index was computed for the single-hand hypothesis for the dominant hand (A) and non-dominant hand (B), for the eight-finger hypothesis (C), and for the two-hand hypothesis (D) (solid linesfemale subjects, dashed lines male subjects). One female subject showed atypical performance in the Post-Test. The data are shown including the subject’s data (thin line) and excluding her data (thick line)
When the moment produced by all eight fingers with respect to the midline of the trunk was considered (eight-finger hypothesis), similar results were observed to those described for the single-hand hypotheses. In particular, practice did not lead to significant changes in the ΔV index (Fig. 8C) and there were no significant differences between females and males. At the Post-Test, V UCM was significantly higher than V ORT over the whole ramp duration (F (1,11)=61.59; p<0.001).
The only significant effects of practice on the ΔV index computed with respect to the moment-stabilization hypothesis were seen when the two hands were viewed as two effectors. A comparison over all the test sessions showed a decrease in the ΔV index (Fig. 8D). This was confirmed by a significant effect of Test in a two-way Gender × Test ANOVA (F (5,5)=3.16; p<0.05). Post hoc tests showed that ΔV at the first practice session P11 was significantly lower than at the Pre-Test. There were no significant Gender effects. In the Post-Test, V UCM was significantly lower than V ORT for the middle and final segments of the ramp duration. This was confirmed by a significant effect of Variance in a two-way Variance × Time ANOVA (F (1,11)=23.45; p<0.001). The effect ofTime was also significant (F (2,11)=55.56; p<0.001). Post hoc tests showed significantly lower ΔV values for the middle and final segments as compared to the initial segment.
Table 1 summarizes the main findings of the study. The upper part of the table shows results for more traditional indices of finger interaction such as MVC, enslaving, and the RMS error index for the main (Ramp-4) task. Results of the UCM analysis are presented separately for the force-stabilization (the middle part of Table 1) and the moment-stabilization (the bottom part of Table 1) hypotheses. Results that are going to be particularly important for the “Discussion” are shown in bold.
Discussion
To summarize the major findings (see Table 1), prior to practice the subjects failed to show stabilization of each hand’s contribution to the task force (F TASK), while they showed stabilization of the pronation/supination moment the fingers of each hand produced. Practice resulted in an improvement of the overall performance of the task. At the same time, fingers of each hand started to show stabilization of the hand’s contributions to F TASK. There were no changes in the index of moment stabilization with practice. The index of stabilization of F TASK by all eight fingers also improved with practice.
Results of the current study demonstrate the applicability of the UCM approach to analysis of synergy formation. Not only the approach allows the quantification of changes in the coordination of effectors during practice, but it also offers a set of tools with which to study the microstructure of this coordination with respect to different performance variables and different subsets of effectors. In particular, it has allowed within-a-hand and between-hands finger interactions to be contrasted with respect to stabilization of the explicit performance variable, the time profile of F TASK, and with respect to another variable, the total moment produced by the subsets of effectors.
Features of performance of an unusual multi-finger task
The task selected in the study was purposefully very unusual. It involved a combined action of asymmetrical finger pairs from the two hands to follow a time course (a ramp) of a task variable, F TASK, that was computed such that it did not allow the subjects to simplify the task and perform it by pressing with all eight fingers. As a result, the subjects struggled with the task prior to practice (at the Pre-Test) and performed it rather poorly. Their RMS error indices were nearly an order of magnitude higher than indices reported for a similar task performed by four fingers of one hand pressing in parallel (Latash et al. 2002a).
The poor performance at the Pre-Test was also reflected in the results of the UCM analysis of the finger interaction. Previous studies of multi-finger, one-hand ramp force production tasks (Latash et al. 2002b) showed preferential stabilization of the total force produced by the fingers by a covariation of variables (mode magnitudes) to individual fingers. Based on those studies, we originally expected to see force stabilization by fingers within each of the hands but problems in coordinating forces produced by each hand to stabilize F TASK. However, our results were opposite to the expectations. In the current study, the subjects were unable to stabilize the contribution of each hand to F TASK. This was particularly pronounced in female subjects (Fig. 5), but the males also failed to stabilize these variables consistently, particularly at early stages of the ramp force production. The failure was equally pronounced in the dominant and non-dominant hand. It was present in both the IR and ML hands.
The within-a-hand results were more similar to our earlier findings of force destabilization and moment stabilization by sets of fingers within a hand during fast force production tasks (Latash et al. 2001; Scholz et al. 2002). Indeed, each hand successfully stabilized the total moment by covariation of mode magnitudes of all fingers as in the cited studies. Moment stabilization was not part of the task, and the subjects did not get any instruction or feedback regarding the total pronation/supination moment the fingers produced. Nevertheless, this seemingly irrelevant variable was stabilized by mode magnitude covariations while F TASK was not. This observation supports an earlier conclusion that moment stabilization is a default mode of finger force covariation, which may be conditioned by everyday experience that typically imposes strict constraints on permissible moment variations (such as during writing, drinking from a glass, or eating with a spoon).
It is potentially important that earlier studies of multi-finger slow ramp force production used more natural finger combinations such as IM, IMR, and IMRL. Besides, the attention of the subject was not split between the two hands, and the force generation by uninstructed (slave) fingers did not affect their performance. These differences might have contributed to the lack of within-a-hand force stabilization despite the relatively slow force production in the current study. There is one more potentially important difference in the data analysis in the current study as compared to the cited earlier studies of multi-finger interaction. Because of the task complexity, we did not assume that the subjects would send zero modes to the slave fingers and analyzed the covariation of all four mode magnitudes for each hand, while in the earlier studies mode magnitudes sent to slave fingers were assumed to be zero. This difference is potentially important because if only two independent variables are available, force- and moment-stabilization become mutually exclusive since the former requires negative covariation of the two modes, while the latter requires their positive covariation. With four independent variables, however, the system is redundant enough to stabilize both force and moment, as we actually observed after practice.
Similarly to previous studies (Latash et al. 2002a, 2002b; Shim et al. 2003b), force-stabilization was particularly poor at low levels of F TASK and gradually improved with an increase in the force along the ramp. This was accompanied by a decline in the index ΔV for moment-stabilization although the pronation-supination moment tended to be stabilized throughout the trial.
Despite the fact that each hand failed to stabilize the average time profile of its contribution to F TASK, the strong negative covariation of forces between the two hands overcame this apparent deficiency and led to stabilization of F TASK by covariations of all eight mode magnitudes. These findings can be interpreted within a two-level hierarchical system for digit force production originally suggested for prehension tasks. According to this view, the upper level of the hierarchy defines forces produced by the thumb and the virtual finger (VF, a metaphorical finger that generates the same mechanical effect as a set of actual fingers; Zatsiorsky et al. 2002; Shim et al. 2003a). At the lower level, the force of the VF is distributed among the actual fingers. We would like to generalize this scheme for two-hand multi-finger force production. In particular, we suggest that the task of producing a pattern of F TASK by a subset of fingers from the two hands involves two hierarchical steps. First, F TASK is distributed between the two hands producing two variables, VFLeft and VFRight corresponding to the action of the left and right VFs. Second, the contributions of VFLeft and VFRight are distributed among the fingers of the hands. Within this scheme, prior to practice, the controller was able to arrange a negative covariation between VFLeft and VFRight, i.e. to establish a two-hand synergy that stabilized F TASK. However, the controller failed to create within-a-hand synergies that would stabilize each hand’s contributions to F TASK, which likely contributed to the overall poor performance at the Pre-Test.
We would like to emphasize that the purpose of the study was not to identify control variables used by the CNS. Bernstein (1967) emphasized that the CNS could not use performance variables, such as forces, for purposes of control. Several recent papers also cast doubt on force control schemes for the production of voluntary movements (Feldman et al. 1998; Ostry and Feldman 2003). Hence, the VF scheme in the previous paragraph should not be taken as a suggestion that the CNS uses VF forces as control variables for the action. The scheme implies that control variables, for example shifts of the positional thresholds for muscle activation (as in the equilibrium-point hypothesis, Feldman 1986; Latash 1993; Feldman and Levin 1995), can be computed in two steps: first, to assure required VF forces assuming unchanged external conditions for the action; second, to assure stabilization of the VF forces by covariation of control variables to hand muscles and muscle compartments that translate into an adequate covariation of finger modes.
Theoretically, practice could have resulted in changes at different steps involved in the production of finger forces. In particular, hand/finger practice has been shown to lead to plastic changes in the cortical representations of the effectors (Pascual-Leone et al. 1995; Pascual-Leone 2001; Latash et al. 2003). On the other hand, peripheral changes, including changes in the reflex loops, were less likely to contribute to the observed effects (Al-Falahe et al. 1990; Vallbo and Al-Falahe 1990). The data presented in the current paper do not allow the distinction among potential neurophysiological sources of the observed changes in indices of finger interaction.
Non-specific effects of practice
Prior to practice, our subjects demonstrated typical values of the indices of finger interaction with the only exception that the male subject group showed relatively low peak forces (MVC). As a consequence, the male and female subgroups did not differ in any of the indices, unlike previous studies, in which men were typically stronger, and showed larger enslaving and smaller force deficit (e.g., Shinohara et al. 2003).
Some of the effects of practice on indices of finger interaction look suboptimal and counterintuitive. In particular, although the attention of the subjects was fixed at the task of producing relatively modest levels of force in the force ramp task, practice led to a significant increase in the maximal finger force (MVC) and in the index of enslaving (E). Let us remember that enslaving was expressed in percent of MVC as in earlier studies (Z.-M. Li et al. 1998; Zatsiorsky et al. 1998), i.e. the forces produced by unintended fingers in single-finger MVC trials increased more than the forces produced by the intended (master) fingers. Enslaving, as quantified in single-finger MVC trials, increased in both task fingers (i.e. those fingers that were instructed to produce force in the Ramp-4 tests) and other, explicitly non-involved fingers. This is unexpected because the main task involved the production of F TASK which represented the difference between the combined task finger forces and combined forces produced by other fingers. Hence, one could expect the subjects to learn to decrease the enslaving, at least in the non-involved fingers. The results, however, are more reminiscent of earlier findings of the effects of practice in persons with Down syndrome (Latash et al. 2002a). In both studies, practice resulted in an increase in both MVC and E. There is a possibility that an increase in the enslaving is an unavoidable counterpart of an increase in finger forces. A study of indices of finger interaction in young and elderly persons has shown a close correlation between MVC and E and allowed the authors to suggest a “strength-dexterity trade-off” hypothesis (Shinohara et al. 2002). Besides, muscle fatigue has also been shown to lead to parallel changes (declines) in both MVC and E (a drop in both, Danion et al. 2000).
Emergence of within-a-hand finger synergies
Over practice, the subjects learned to perform the task better as reflected by a significant drop in the error index (RMS). This improvement was associated with the emergence of stabilization of the contributions of each hand to the F TASK. In other words, the four mode magnitudes sent to the fingers of a hand covaried to stabilize the average input of the hand into F TASK. Note that the emergence of within-a-hand force stabilization was accompanied by an unchanged moment stabilization. This is a non-trivial observation since force-stabilization and moment-stabilization may be viewed as competitive: The former requires predominantly negative covariation of finger forces while the latter requires positive covariation of forces produced by fingers acting at different sides of the axis of moment production.
The UCM analysis has shown improved force stabilization with practice for the two between-hand hypotheses as well. For the eight-finger hypothesis, improved force-stabilization was accompanied by unchanged moment-stabilization. For the two-hand hypothesis, however, moment-stabilization suffered as an unavoidable consequence of better force-stabilization in a system that has only two independent variables (cf. Latash et al. 2001).
Taken together, these observations stand in contrast to the earlier report by Domkin et al. (2002). Unlike that study, practice in our experiments induced a larger reduction in the component of finger force variance that affected the selected performance variable (V ORT) than in the component of force variance that did not (V UCM). These observations are more in line with results of a recent study of the effects of a brief single-session practice on force patterns in a three-finger ramp force production task (Latash et al. 2003). In that study, at early stages, the practice led to a larger drop in the component of finger force variance that affected the total force, while at later stages the other, seemingly irrelevant component of finger force variance showed a sharper decrease. Note, however, that the mentioned study did not use the UCM analysis, and its results could be contaminated by likely changes in the enslaving in the course of practice.
Effects of practice on motor performance in multi-element, redundant systems have been traditionally viewed as a staged process that involves freezing and releasing degrees-of-freedom (Bernstein 1996; Vereijken et al. 1992). The current approach views the process of motor learning as leading to adjustments in an interaction of independent variables sent to all effectors. These adjustments are not expected to lead to involvement of new variables into or purging some of the pre-existent variables out of the interaction, at least not within the used sets of effectors and tasks. These results are more in line with the idea of the existence of multiple flexible solutions to a variety of motor problems rather than selection of a single optimal solution (Gelfand and Tsetlin 1966). This view has recently gained support in both experimental and theoretical studies (Scholz et al. 2000; Todorov and Jordan 2002; Schieppati et al. 2002).
Motor practice is known to lead to plastic changes in neural representations in different brain structures including the motor cortex; such changes have been studied using transcranial magnetic stimulation (TMS), electroencephalography, and imaging techniques (Pascual-Leone et al. 1995; Classen et al. 1998; Liepert et al. 1999; Carroll et al. 2001; Sakai et al. 2002; Slobounov et al. 2002). In particular, practice of music, reading Braille, a particular thumb action, and multi-finger force production tasks has been shown to lead to plastic changes in neural structures involved in the generation of TMS induced responses (Pascual-Leone et al. 1995; Hamilton and Pascual-Leone 1998; Classen et al. 1998; Pascual-Leone 2001; Nordstrom and Butle 2002; McKay et al. 2002; Latash et al. 2003). It is conceivable, therefore, that changes in the interaction among the independent variables (mode magnitudes) are accompanied by plastic neural changes reflected, in particular, in changed patterns of finger responses to TMS of the primary motor cortex (Latash et al. 2003). Analysis of these data is to follow.
References
Al-Falahe NA, Nagaoka M, Vallbo AB (1990) Lack of fusimotor modulation in a motor adaptation task in man. Acta Physiol Scand 140:23–30
Bernstein NA (1967) The coordination and regulation of movements. Pergamon Press, London
Bernstein NA (1996) On dexterity and its development. In: Latash ML, Turvey MT (eds) Dexterity and its development. Erlbaum, Mahwah, NJ, pp 277–304
Carroll TJ, Riek S, Carson RG (2001) Corticospinal responses to motor training revealed by transcranial magnetic stimulation. Exerc Sport Sci Rev 29:54–59
Classen J, Liepert J, Wise SP, Hallett M, Cohen LG (1998) Rapid plasticity of human cortical movement representation induced by practice. J Neurophysiol 79:1117–1123
Danion F, Schöner G, Latash ML, Li S, Scholz JP, Zatsiorsky VM (2003) A force mode hypothesis for finger interaction during multi-finger force production tasks. Biol Cybern 88:91–98
Domkin D, Laczko J, Jaric S, Johansson H, Latash ML (2002) Structure of joint variability in bimanual pointing tasks. Exp Brain Res 143:11–23
Feldman AG (1986) Once more on the equilibrium-point hypothesis (λ model) for motor control. J Mot Behav 18:17–54
Feldman AG, Levin MF (1995) The origin and use of positional frames of reference in motor control. Behav Brain Sci 18:723–804
Feldman AG, Ostry DJ, Levin MF, Gribble PL, Mitnitski AB (1998) Recent tests of the equilibrium-point hypothesis (lambda model). Motor Control 2:189–205
Gelfand IM, Tsetlin ML (1966) On mathematical modeling of the mechanisms of the central nervous system. In: Gelfand IM, Gurfinkel VS, Fomin SV, Tsetlin ML (eds) Models of the structural-functional organization of certain biological systems. Nauka, Moscow (in Russian, a translation is available in 1971 edn by MIT Press), pp 9–26
Hamilton RH, Pascual-Leone A (1998) Cortical plasticity associated with Braille learning. Trends Cogn Sci 2:168–174
Latash ML (1993) Control of human movement. Human Kinetics, Urbana, IL
Latash ML, Scholz JP, Danion F, Schöner G (2001) Structure of motor variability in marginally redundant multi-finger force production tasks. Exp Brain Res 141:153–165
Latash ML, Kang N, Patterson D (2002a) Finger coordination in persons with Down syndrome: atypical patterns of coordination and the effects of practice. Exp Brain Res 146:345–355
Latash ML, Scholz JP, Danion F, Schöner G (2002b) Finger coordination during discrete and oscillatory force production tasks. Exp Brain Res 146:412–432
Latash ML, Scholz JP, Schöner G (2002c) Motor control strategies revealed in the structure of motor variability. Exerc Sport Sci Rev 30:26–31
Latash ML, Yarrow K, Rothwell JC (2003) Changes in finger coordination and responses to single pulse TMS of motor cortex during practice of a multi-finger force production task. Exp Brain Res 151:60–71
Li Z-M, Latash ML, Zatsiorsky VM (1998) Force sharing among fingers as a model of the redundancy problem. Exp Brain Res 119:276–286
Li S, Danion F, Latash ML, LiZ-M, Zatsiorsky VM (2001) Bilateral deficit and symmetry in finger force production during two-hand multi-finger tasks. Exp Brain Res 141:530–540
Liepert J, Terborg C, Weiller C (1999) Motor plasticity induced by synchronized thumb and foot movements. Exp Brain Res 125:435–439
McKay DR, Ridding MC, Thompson PD, Miles TS (2002) Induction of persistent changes in the organisation of the human motor cortex. Exp Brain Res 143:342–349
Nordstrom MA, Butle SL (2002) Reduced intracortical inhibition and facilitation of corticospinal neurons in musicians. Exp Brain Res 144:336–342
Ostry DJ, Feldman AG (2003) A critical evaluation of the force control hypothesis in motor control. Exp Brain Res 153:275–288
Pascual-Leone A (2001) The brain that plays music and is changed by it. Ann N Y Acad Sci 930:315–329
Pascual-Leone A, Dang N, Cohen LG, Brasil-Neto JP, Cammarota A, Hallett M (1995) Modulation of muscle responses evoked by transcranial magnetic stimulation during the acquisition of new fine motor skills. J Neurophysiol 74:1037–1045
Sakai K, Ramnani N, Passingham RE (2002) Learning of sequences of finger movements and timing: frontal lobe and action-oriented representation. J Neurophysiol 88:2035–2046
Schieppati M, Giordano A, Nardone A (2002) Variability in a dynamic postural task attests ample flexibility in balance control mechanisms. Exp Brain Res 144:200–210
Scholz JP, Schöner G (1999) The uncontrolled manifold concept: identifying control variables for a functional task. Exp Brain Res 126:289–306
Scholz JP, Danion F, Latash ML, Schöner G (2002) Understanding finger coordination through analysis of the structure of force variability. Biol Cybern 86:29–39
Scholz JP, Kang N, Patterson D, Latash ML (2003) Uncontrolled manifold analysis of single trials during multi-finger force production by persons with and without Down syndrome. Exp Brain Res 153:45–58
Shim JK, Latash ML, Zatsiorsky VM (2003a) Prehension synergies: trial-to-trial variability and hierarchical organization of stable performance. Exp Brain Res 152:173–184
Shim JK, Latash ML, Zatsiorsky VM (2003b) The central nervous system needs time to organize task-specific co-variation of finger forces. Neurosci Lett 353:72–74
Shinohara M, Li S, Kang N, Zatsiorsky VM, Latash ML (2003) Effects of age and gender on finger coordination in maximal contractions and submaximal force matching tasks. J Appl Physiol 94:259–270
Slobounov S, Chiang H, Johnston J, Ray W (2002) Modulated cortical control of individual fingers in experienced musicians: an EEG study. Clin Neurophysiol 113:2013–2024
Todorov E, Jordan MI (2002) Optimal feedback control as a theory of motor coordination. Nature Neurosci 5:1226–1235
Turvey MT (1990) The challenge of a physical account of action: a personal view. In: Whiting HTA, Meijer OG, van Wieringen PCW (eds) The natural-physical approach to movement control. VU University Press, Amsterdam, pp 57–92
Vallbo AB, al-Falahe NA (1990) Human muscle spindle response in a motor learning task. J Physiol 421:553–568
Vereijken B, van Emmerick REA, Whiting HTA, Newell KM (1992) Free(z)ing degrees of freedom in skill acquisition. J Mot Behav 24:133–142
Zatsiorsky VM, Li Z-M, Latash ML (1998) Coordinated force production in multi-finger tasks. Finger interaction, enslaving effects, and neural network modeling. Biol Cybern 79:139–150
Zatsiorsky VM, Gao F, Latash ML (2003) Prehension synergies: effects of object geometry and prescribed torques. Exp Brain Res 148:77–87
Acknowledgements
We are grateful to Jae Kun Shim and Halla Olafsdottir for their help with running the experiments and to John Scholz for many helpful discussions. The study was partly supported by NIH grants NS-35032 and AG-018751.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kang, N., Shinohara, M., Zatsiorsky, V.M. et al. Learning multi-finger synergies: an uncontrolled manifold analysis. Exp Brain Res 157, 336–350 (2004). https://doi.org/10.1007/s00221-004-1850-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-004-1850-0