
Abstract
Grip force adaptation to Coriolis and centrifugal force perturbations was tested in healthy subjects. Eight subjects were seated in a rotating chamber in a rotating axis position. They each grasped an instrumented object resting on the thumb, which was stabilized by the other fingers from above. Subjects performed horizontal point-to-point movements with the grasped object away and towards the trunk. These movements were directed in a nonparallel fashion towards the axis of rotation prior (40 pre-rotational movements), during (80 per-rotational movements) and following (40 post-rotational movements) clockwise body rotation. During pre- and post-rotational movements two load force peaks of similar magnitude occurred during the acceleratory and deceleratory phases of the movements. Accordingly, a Coriolis force, which was orthogonal and proportional to the linear velocity of the moving arm, as well as a centrifugal force proportional to the system’s squared angular velocity and movement amplitude developed during per-rotational movements. The load perturbations altered the load force profile in a characteristic way. The first 10 per-rotational movement sequence revealed that there was a less precise coupling between grip and load force magnitudes and a reduced temporo-spatial co-ordination between grip and load force profiles. With increasing number of per-rotational movements, there was significant improvement in the temporo-spatial co-ordination and in the coupling in force magnitude between grip and load force profiles, indicating an ongoing adaptation process. The coupling between grip and load forces proved to be similarly precise for the last 10 per-rotational movements and for pre-rotational movements, suggesting complete adaptation. Significant effects were observed for the first post rotational movements following adaptation to the per-rotational load characteristics both for the temporal co-ordination between grip and load forces and for the coupling in force magnitudes. However, the last 10 post-rotational movements proved to be similarly precise with comparison to pre-rotational performance in terms of grip force regulation with movement-induced loads. The results are discussed within the context of the CNS ability to use internal models when planning and processing anticipatory grip force adjustments during manipulative tasks.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
When a grasped object is moved, grip force is modulated parallel to acceleration-dependent fluctuations in load force (the vectorial sum of all acceleration induced forces) without an obvious time delay (Flanagan et al. 1997; Flanagan and Wing 1995). This finding indicates that the central nervous system (CNS) is able to precisely predict movement-induced load fluctuations and to regulate grip force in anticipation. Anticipatory control refers to the use of internal models, which are thought to capture the relationships between the mechanical object properties, the limb mechanics and the kinematics of the task (Blakemore et al. 1988; Flanagan and Wing 1997; Wolpert et al. 1995, 1998, 2001). Sensory feedback is necessary to acquire, maintain and update internal models (Johansson and Edin 1993; Johansson and Westling 1984). This type of control is based on the comparison of actual sensory input ( i.e., mechanical events, such as displacements at the skin-object interface through object slipping) and the predicted sensory input. The predicted sensory outcome (corollary discharge) (Sperry 1950) of a movement is produced by sending a copy of the motor command (efference copy) (Von Holst 1950) to an internal forward model. Detection of a mismatch between predicted and actual sensory input due to erroneous movement execution triggers corrective responses and an update of relevant internal models used to predict sensory events and estimate the motor commands required (Flanagan and Johansson 2002; Johansson and Edin 1993; Wolpert and Flanagan 2001).
We examined the relationship between grip and load force when a grasped object was moved in a rotating environment. When we move a hand-held object while our torso is simultaneously rotating, an inertial force known as the Coriolis force (F Cor ) is generated when the object is moved nonparallel to the axis of rotation. The Coriolis force always acts orthogonal to the movement path. In a room rotating clockwise, an object moving away from the axis of rotation will be deviated leftward. Another force generated in a rotating environment is the centrifugal force (F Cent ). When the grasped object is moved away from the axis of rotation the increasing magnitude of the centrifugal force results in an increase of the object’s load, which is independent from the object’s linear velocity. In most tasks studying grip force compensation for unexpected load perturbations, subjects were constrained by an external mechanical apparatus (Blakemore et al. 1998; Flanagan et al. 2003; Flanagan and Wing 1997; Häger-Ross et al. 1996; Häger-Ross and Johansson 1996; Johansson et al. 1992a, 1992b). For example, subjects transported a hand-held object that was attached to an external robotic arm generating the load (Blakemore et al. 1998; Flanagan et al. 2003; Flanagan and Wing 1997). In this situation the perturbation acted primarily on the hand-held object and is comparable to holding the leash of a rambunctious dog. When transporting objects in a rotating environment the perturbing forces act on both the moving limb and on the external object. The Coriolis force is not activated upon motion commencement nor upon termination, but gains strength during the motion process itself. For example, during motion a Coriolis force orthogonal and proportional to the linear velocity of the moving arm is generated. For the very first movements the load perturbation at hand is not predictable, because the subject performing the task does not perceive the rotation being seated in the axis of rotation. In other words, internal predictions of the sensory consequence of the descending motor command and the actual sensory input are not consistent.
During point-to-point movements the object is held stationary in between each movement. When we perform horizontal point-to-point movements with a hand-held object in normal gravity, gravity acts perpendicular to the direction of movement and two inertial load peaks of similar magnitude result from the acceleratory and deceleratory phases of the movement. Flanagan and Wing demonstrated that under laboratory conditions, grip force is precisely modulated with load fluctuations due to movement (Flanagan and Wing 1993). The regular relationship between gravitational and inertial loads experienced during voluntary object transport in normal gravity is profoundly changed in a rotating environment. It is not known how grip force is adjusted to Coriolis and centrifugal force perturbations.
Recently, we studied the coupling between grip and load forces during vertical point-to-point movements with a grasped object in hyper- and microgravity induced by parabolic flight maneuvers (Nowak et al. 2002a). During vertical movements under normal and hypergravity, both gravitational and inertial forces were parallel to the direction of movement. Consequently, a maximum of load force occurred earlier or later in the course of motion depending on whether the movement was upward or downward. Hypergravity resulted in a near doubling of the object’s weight. In microgravity the gravitational force vector was absent and only inertial loads arose from the arm movements. Interestingly, the grip force profile was precisely modulated with the fluctuations in load force during both hyper- and microgravity. However, subjects established an increased ratio between grip and load forces during microgravity. These results indicate that the temporal regulation of the grip force profile is highly automatized and stable, whereas the planning of force magnitude is more flexible and reflects environmental demands.
Due to the unpredictable load perturbations arising from arm movements in a rotating environment, we expect the normally very precise temporo-spatial coupling between the grip and load force profiles to be initially impaired. Several studies demonstrated that predictive grip force control may rapidly be re-established when the external perturbation becomes predictable (Blakemore et al. 1998; Flanagan et al. 2003; Flanagan and Wing 1993). We therefore expected that the perturbing effects of Coriolis and centrifugal forces can be learned and that a temporary after-effect occurs when the rotation had ceased. The ratio between grip and load force can be considered a sensitive measure of the efficiency of produced grip force. An increase of this ratio is well documented when sensory motor processing is disturbed (Cole et al. 1999; Hermsdörfer et al. 2003; Nowak et al. 2001, 2002b; Nowak and Hermsdörfer 2003). We hypothesized that the force ratio will initially be elevated during arm movements with the hand-held object in a rotating environment.
Methods
Subjects
Eight healthy individuals (two females, six males) aged between 25 and 43 years (mean age 36.4 years) participated in the experiments. All participants were without vestibular or sensorimotor impairments that could have influenced their performance. All subjects were right-handed and used their right hand to grasp and move the object. Informed consent of all subjects was obtained according to the declaration of Helsinki. The study was approved by the local Ethics Committee.
Instrumented object
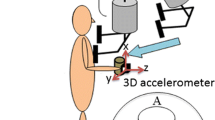
Subjects grasped a cylindrical and cordless instrumented object. The object and the configuration of the hand and fingers used to grasp it are illustrated in Fig. 1A. The object was grasped in such a way that the center of mass and the force sensor were in the axis of grip force. The mass of the object was 0.350 kg. The object had a diameter of 9.0 cm and a depth of 4.0 cm (Nowak et al. 2002b; Nowak and Hermsdörfer 2003). Grip surfaces were of polished aluminum in all trials performed. The object incorporated a force sensor for grip force registration and linear acceleration sensors for registration of acceleration signals in three dimensions (see Fig. 1A). The force sensor registered grip forces at two different sensitivities between 0–10 N (0.0025 N / Bit) and 0–50 N (0.0125 N/Bit). The linear acceleration sensors measured linear acceleration within a range of ±50 m/s2. The center of mass of the force transducer was halfway between the points at which the fingers contacted its surfaces. Recorded grip force and acceleration data were A/D-converted with a sampling rate of 100 Hz and stored within the object. Data were transferred to a personal computer for analysis following each experimental setting with a single subject.

A Illustration of the instrumented object and the configuration of the hand and fingers used to grasp it. The object incorporated a force sensor to register grip force and three linear acceleration sensors to measure accelerations in three dimensions (X-, Y- and Z-axes). The grip force (GF) exerted against the hand-held object had to counteract the load forces arising from the movements. The load force (LF) was calculated from the object’s mass and the vectorial summation of the inertial accelerations along the objects Y- and Z-axes. B A Coriolis force (FCor) is generated during movements away from the trunk while the body is rotated clockwise. Coriolis force is directed to the left and proportional to the angular velocity vector of the body (ω), the mass of the object (m) and the movement’s linear velocity vector (v) relative to the trunk [FCor=-2m · (ω×v)]. The centrifugal force (FCent) is proportional to the product of the squared system’s angular velocity vector (ω) and the position vector relative to the center of rotation (r) [FCent=-m · (ω× (ω×r)]. When the grasped object is moved away from the axis of rotation the increasing magnitude of the centrifugal force results in an increase of the object’s load, which is independent from the object’s linear velocity
Rotatable Chamber
A rotatable chamber was used for the experiments. The subjects were seated in a chair located in the axis of rotation so that the start position of the hand corresponded to the center of rotation. This positioning ensured that there were no significant unusual forces acting on the subject’s arm and hand at the beginning and end of the arm movements. The subject’s head was securely fixed in a contoured headrest that prevented head movements and vestibular input during the experiments. Head movements were not possible during the experiments.
Procedure
The experiment was divided into pre-rotation, per-rotation, and post-rotation components. The pre-rotation period contained 40 horizontal point-to-point arm movements with the hand-held object (20 movements away and 20 towards the trunk) performed by the right arm prior to rotation. The per-rotation period contained 80 point-to-point arm movements with the hand-held object (40 movements away from the trunk and 40 movements towards the trunk) performed with the right arm during rotation in a horizontal plane nonparallel to the axis of rotation. The left arm was not voluntarily moved at all during rotation. The post-rotation period involved 40 horizontal point-to-point movements with the grasped object (20 movements away and 20 towards the trunk) performed with the right arm when rotation has ceased. The total experimental time was about 45 min for each subject.
Prior to the experiments, an experimenter instructed the subjects to perform horizontal point-to-point arm movements and the subjects performed practice trials. The subjects were told to grasp the object with the tips of the thumb and other fingers on either sides and then rotate the forearm and hand into a pronation position. Their performing right arm was slightly abducted vertically with the forearm, wrist and hand unsupported and extending before them. The forearm and hand were constantly oriented in a pronation position with the object resting on the thumb and being stabilized by the tips of the other fingers from above (see Fig. 1A). Subjects were instructed to move the object on a straight horizontal line away from the trunk (centrifugal movements) and towards the trunk (centripetal movements). For sake of simplicity, movements away from the trunk are termed centrifugal and movements towards the trunk are termed centripetal, regardless of the rotation condition. Subjects were instructed to keep the orientation of the object constant during movement. Subjects were paced by an acoustic signal (tone of 200 ms duration) to move the object during a 0.2 s period in a centrifugal or centripetal direction and to hold it stationary for a period of 1.8 s (during which the acoustic signal paused) between each movement. The amplitude of the movements should be approximately 30 cm and was specified by simply holding a ruler beside the moving hand during several practice movements performed prior to the experiments. The horizontal movements were mainly achieved by flexion and extension of the elbow joint. Small adaptive movements at the wrist guided the motion of the object along a straight horizontal line. To protect against fatigue, short resting periods were introduced between sets of 8 to 10 paired arm movements away and towards the trunk during which the performing arm rested in the axis of rotation without being moved.
Prior to the experiments, subjects washed their hands with soap and water and dried them. They grasped the object and were seated in a chair located in the axis of rotation in a rotatable chamber with their head fixed in a headrest. The chamber lights were extinguished and remained out for the duration of the pre-, per-, and post-rotational experiments. Following the pre-rotational trials, the chamber was accelerated at 1°/s2 on a constant velocity of 300°/s (Fig. 1B). Two minutes were allowed to elapse at constant velocity before the subjects began the per-rotational movements so that the horizontal semicircular canals were back at their resting discharge levels. During this time subjects positioned the object and their resting hands on their lap close to the axis of rotation and told not to move their limbs. The chamber was rotated clockwise and during both centrifugal and centripetal movements a Coriolis force was generated that was directed leftward with respect to the subject (Fig. 1B). During the centrifugal per-rotational movement, the increasing radius of the moving hand results in an increase of the centrifugal force, which is independent from the object’s linear velocity (Fig. 1B). An opposite pattern occurred during the centripetal per-rotational movement. On deceleration to rest (after the per-rotation experiments), an additional 2 min were allowed to pass before the post-rotation movements were performed. Again, subjects were instructed to position the object and their hands on their lap (close to the axis of rotation) and told not to move their limbs. At the end of the experiments subjects were asked to rotate the forearm into an intermediate position between pronation and supination, and to slowly separate the thumb and other fingers until the object dropped from the grasp. This procedure was carried out three times for each subject to obtain an estimate of the minimal grip force necessary (slip force; see Johansson and Westling 1984) to prevent the object from slipping. The slip point was defined as the first detectable change in acceleration along the objects Z-axis and the minimum grip force was determined at this time point.
Data analysis
The kinematic acceleration (ACC) in the direction of the movement was measured along the object’s Z-axis (Fig. 1). Positive acceleration in the Z-axis was directed towards the trunk and towards the axis of rotation during the movements. Gravitational acceleration was measured along the object’s X-axis (compare Fig. 1A). The load force (LF) was calculated from the object mass and the vectorial summation of accelerations measured along the Y- and Z-axis (see Fig. 1A). This method included the measurement of Coriolis forces in the transversal (Y-axis) direction, the measurement of centrifugal and inertial loads in the direction of movement (Z-axis) and additional inertial loads, which arose from movement components along the Y-axis. Accelerations along the object’s X-axis (including gravity) were excluded as the object constantly rested on the subject’s thumb and loads acting in the direction of grip force (mainly the constant weight) attributed to less than 10% of the total load during pre-, per- and post-rotational performance.
Several time points within the movement course were determined: (1) grip force maximum (Max. GF), (2) first peak in load force at the time of maximum acceleration at the movement onset (coinciding with a minimum in the acceleration trace for centrifugal movements and with a maximum in the acceleration trace for centripetal movements), (3) second peak in load force at the time of maximum deceleration at the end of movement (coinciding with a maximum in the acceleration trace for centrifugal movements and with a minimum in the acceleration trace for centripetal movements), and (4) the trough between both load force peaks as determined at the time the acceleration signal along the Z-axis passes the zero-baseline in between maximum and minimum acceleration. In addition, the first time derivates of grip and load forces were calculated and (5) maximum grip force rate (Max. GF Rate) and (6) maximum load force rate (Max. LF Rate) were determined for each movement. In Figs. 2 and 3 the individual time points (except the maximum grip and load force rates) are indicated by circles within the grip force and load force traces of the last pre- and per-rotational movements performed by subject 02.

Performance of subject 02 (male, 32 years) during the last pre-rotational movements away and towards the trunk. Traces of grip forces, load force and the acceleration in the direction of movement are illustrated. The dashed vertical lines indicate the movement onset. Only inertial loads arose from the movements. The circles within the load force and grip force traces indicate the time points determined for data analysis. A correlation analysis between grip and load forces was performed for movements away and towards the trunk (gray boxes). In the bottom panel grip force is plotted against load force and the r 2 correlation coefficients and slopes of the linear regression lines are indicated

Performance of subject 02 during the last centrifugal and centripetal per-rotational movements. Traces of grip forces, load force and the acceleration in the direction of movement are illustrated. Individual forces contributing to the total load during rotation could be discerned within the load force traces: Inertial forces (FInert), Coriolis force (FCor), centrifugal force (FCent) and their combinations. See legend of Fig. 2 for further details
The ratio between grip and load forces (GF/LF) at the time of the two load force peaks and the trough between them was used to relate the magnitudes of the two forces directly. This force ratio is considered a highly sensitive measure of the economy of produced grip force in relation to the load force. We analyzed the maximum grip force rates in addition to peak grip forces because the former occur earlier during the movement and may provide a better index of the participants’ predictions of object loading, while maximum forces may be misleading since they may be influenced by reactive control mechanisms. A correlation analysis between maximum grip and load force rates was performed. In order to assess the temporal coordination of grip and load forces, we examined the timing of the grip and load force peaks, as well as the timing of the peak rates of increase in grip force and load force. A correlation analysis between the times to maximum grip and load force rates was performed. To describe the stability of the temporo-spatial modulation of the grip force profile with the load force profile, we performed a linear regression analysis between grip force and load force for the entire movement course. In the grip and load force panels of Figs. 2 and 3, the gray boxes indicate the periods obtained for linear regression analysis and the bottom panels denote grip force plotted against load force for these periods. The average r 2 correlation coefficients were calculated for each subject to assess the regularity and stability of the grip force modulation with the movement-induced load fluctuations during the movements. The average slopes and intercepts were calculated for each subject to describe the gain of modulation of the grip force profile with the load force profile. A repeated measures analysis of variance (ANOVA) was performed on the ratios between grip and load forces (calculated at the two peaks in load force and at mid-movement) and on the time lags between peak rates of force increase and peak forces of grip and load force with the factors “session” (pre-, per- and post-rotation), “movement direction” (centrifugal and centripetal movement), and “early-late” (first and last movements). T-tests were used for post-hoc comparisons of pairs. A P value of 0.05 was considered statistically significant. Group means and standard deviations are reported.
Results
Qualitative description
All subjects complied with the instructions and performed horizontal point-to-point arm movements prior, during, and following rotation without dropping the object. The qualitative observations for the coupling between grip and load forces during pre-, per- and post-rotational movements with the hand-held object were identical for all subjects.
Pre-rotational performance
In Fig. 2 acceleration, load and grip force traces are illustrated for consecutive pre-rotational centrifugal and centripetal movements performed by subject 02. During horizontal point-to-point movements performed prior to rotation, two peaks in load force occurred at the acceleratory and deceleratory phases of the movements. The grip force established against the hand-held object increased close to the onset of movement in parallel with the load force. The grip force remained elevated during the movement and decreased towards the end of the movement. A maximum peak in grip force coincided with one of the peaks in load force, and in about 80% of the movements two distinct grip force peaks could be discerned, which corresponded with both peaks in load force. When two peaks in grip force occurred, the grip force trace only dipped slightly between them. However, load force returned to the baseline level in between the two load peaks. Note that the load force during the phase of stationary holding the object prior to and in between the movements is above zero. This indicates that the subject tilted the object slightly along its Z- or Y-axis. In the bottom panel of Fig. 2 grip force is plotted against load force for centrifugal and centripetal movements. Grip and load force were highly correlated, indicating a very close modulation of grip force with load force. The described pattern of grip force modulation with the movement-induced load fluctuation was also observed during the last post-rotational movements. The close coupling between grip and load force during horizontal point-to-point movements with the grasped object suggests that the modulation of grip force is processed in anticipation of the load forces arising from voluntary arm movements (Flanagan and Wing 1993, 1995). Anticipation of the movement-induced loads was indeed possible in this situation as no unexpected load perturbations occurred.
Per-rotational performance
Figure 4 illustrates grip and load force signals obtained from the last pre-rotational movements, the first ten, fifteenth, twentieth, thirtieth, fortieth per-rotational and the first ten post-rotational movements of subject 06. During the first per-rotational movements the subject’s grip force was about four times higher than the movement-induced loads. However, a very rapid decrease of force overflow and a more precise modulation of grip force with the movement-induced load fluctuations occurred within ten centrifugal and centripetal movements. Indeed, the modulation of grip force with the load fluctuations was of similar precision during the fifteenth, twentieth, thirtieth and fortieth centrifugal and centripetal per-rotational movements. The grip force proved to be only slightly higher than the load force and a close temporal coupling between both force profiles could be shown (Fig. 4).

Performance of subject 06 (male, 42 years). Grip (black traces) and load forces (gray traces) are illustrated for the last pre- and selected per- and post-rotational movements. The dashed vertical lines represent zero force
Figure 3 illustrates acceleration, load force and grip force profiles obtained from the last per-rotational movements of subject 02. Note that the load force between the movements was above zero due to centrifugal force. Inertial loads arising from the object’s acceleration at the onset of the centrifugal movement lead to an increase in load force and exhibited a first peak that coincided with maximum acceleration of the object (minimum in the acceleration trace). In the middle of the centrifugal movement load force exhibited an inflection until a second peak coinciding with maximum deceleration (a maximum in the acceleration trace) occurred. The Coriolis force prevented the load force to drop between the two load force peaks. During the deceleratory phase of the movement, the load force peak was greater than the peak during the acceleratory phase of the movement. This difference resulted from additional loads arising from the movement in a rotating environment. During the deceleratory phase of the movement Coriolis and centrifugal forces added to the inertial load of the decelerated object. However, the load force decreased upon termination of the deceleratory phase of the movement and did not return to the baseline level prior to the movement onset. The load magnitude during the commencing phase of stationary holding was dependent on the centrifugal force. Following the phase of stationary holding, the object was moved centripetal to the axis of rotation. During the centripetal movement, the load force trace first exhibited a maximum peak at the acceleratory phase of the movement (combination of inertial, Coriolis and centrifugal loads), followed by a trough (depending on Coriolis force) and finally trailed by a smaller second peak at the deceleratory phase of the movement.
In the top panel of Fig. 3 the grip force established against the hand-held object is illustrated. The subject’s grip force increased right from the movement onset in parallel with the increase in load force and reached a maximum in the middle of the centrifugal movement close to the onset of the centripetal movement. Following the occurrence of maximum grip force, the grip force decreased in parallel with load force until reaching the baseline level during the phase of stationary holding again. In about 80% of per-rotational movements performed by all subjects we observed additional (often slight) inflections in grip force coinciding with the individual peaks in load force at the onset, middle and end of movement. During the last per-rotational movements the subject’s grip force was only a small amount higher than load force. These findings suggest adaptation of the grip force profile to the unusual load force profile. In the bottom panel of Fig. 3 grip force is plotted against load force during the centrifugal and centripetal movements indicated by shaded areas in the grip and load force panels. The r 2 correlation coefficients and slopes of the least square regression lines are indicated. Grip and load forces were highly correlated and the slopes of the least square regression lines were close to unity for both movements. This result suggests a very close modulation of grip force with load force.
Post-rotational performance
In Fig. 4 grip and load force traces are illustrated during the first ten post-rotational movements away and towards the trunk of subject 06. During the first three post-rotational movements the subject established inefficiently elevated grip forces (up to three times higher than the load force) against the hand-held object. This finding reflects a higher insecurity with the task, probably due to the after-effect following adaptation of the grip force profile to the load force profile during per-rotational performance. However, this effect rapidly vanished and grip force scaling and the coupling between grip and load force profiles became more efficient and precise during the first three post-rotational movements. Indeed, the modulation of the grip force profile with the load force profile was already of similar precision during the fourth centrifugal and centripetal post-rotational movements when compared to the last pre-rotational movements.
Quantitative analysis of the coupling between grip and load force magnitudes
The average slip forces obtained from the three slipping procedures for each subject ranged from 1.5 to 2.0 N (group mean 1.8±0.2 N). The ratio between grip and load force is considered a sensitive measure of the efficiency of produced grip forces and was calculated at three time points within the movement course (see circles in the load force traces of Figs. 2 and 3). Repeated measures ANOVAs were performed separately on the ratios between grip and load forces with the factors “session” (pre-, per- and post-rotation), “movement direction” (centrifugal and centripetal movement), and “early-late” (first and last movements) as main factors. For the ratios at the first and second peak in load force a significant effect of “session” (first peak: F (2,14)=12.1, P<.001; second peak: F (2,14)=37.2, P<.001), “movement direction” (first peak: F (1,7)=7.0, P<.05; second peak: F (1,7)=14.5, P<.001) and “early-late” (first peak: F (1,7)=17.4, P<.01; second peak: F (1,7)=14.9, P<.01) was found. For the ratio at mid-movement a significant influence of “session” (F (2,14)=8.4, P<.01) and “early-late” (F (2,14)=14.8, P<.01), but not of “movement direction” (F (1,7)=2.3, P=.17) was found. For ratios at the first and second peak in load force interactions “session”×”early-late” (first peak: F (1,7)=6.0, P<.02; second peak: F (1,7)=14.9, P<.01) and “session”×”direction” (first peak: F (2,14)=23.3, P<.001; second peak: F (2,14)=10.0, P<.01) were observed. For the ratio at mid-movement only an interaction “session”×”early-late” was found (F (2,14)=9.5, P<.01). In the following we describe the results of post hoc comparisons between force ratios and time lags.
Immediate effects of rotation and adaptation to Coriolis and centrifugal forces
In Table 1 the means and standard deviations of the ratios between grip and load force are illustrated for pre-, per- and post-rotational movements. Post hoc tests demonstrated that the ratio at the first peak in load force was significantly greater during the first per-rotational movements than during the last pre-rotational (P<.01) and last per-rotational movements, regardless of movement direction (all P<.05). Thus, during the first per-rotational trial, subjects employed inefficiently high grip forces, but improved by the last per-rotational trial. The force ratio at the second load force peak was similar (all P≥.05) for first per-rotational, last pre-rotational and last per-rotational centrifugal movements. However, for centripetal movements the force ratio at the second load peak was significantly greater for first per-rotational than for last pre-rotational and last per-rotational movements (all P<.01).
Thus, at least with regard to movements towards the trunk, subjects applied inefficiently high grip forces during the first per-rotational trial, but significantly improved by the last per-rotational trial. Interestingly, at mid-movement the force ratio was significantly smaller during first per-rotational than during last pre-rotational movements, regardless of movement direction (all P<.01). This difference results from differences in the load force profiles during pre- and per-rotational movements. During pre-rotational movements the load force dropped back to zero force in between both load peaks (see Fig. 2), whereas a Coriolis force occurred in between both load peaks during per-rotational movements (see Fig. 3). The ratio at mid-movement was greater during the first than during the last per-rotational movements (P<.05). This observation implies that subjects reduced their grip force during the last per-rotational movements.
Incomplete adaptation to Coriolis and centrifugal force perturbation
To assess whether complete adaptation occurred during per-rotational performance, the last pre-rotational movements were compared with the last per-rotational movements. The force ratio at the first load peak was significantly greater during the last per-rotational movements than during the last pre-rotational centrifugal movements (P<0.01). In addition, the force ratio at the second load peak were significantly greater during the last per-rotational centripetal movements than during the last pre-rotational centripetal movements (P<0.01). The force ratio at the first load peak was similar for last pre-rotational and last per-rotational movements in the centripetal direction. Accordingly, the force ratio at the second load peak was similar for last pre-rotational and last per-rotational movements in the centrifugal direction. The force ratios at mid-movement were constantly smaller during the last per-rotational when compared to the last pre-rotational movements, regardless of movement direction (all P<0.03).
After-effects following rotation
To study the persistence of adaptation we compared the last per-rotational with the first post-rotational movements. The force ratio at the first load peak was significantly greater (P<.05) for last per-rotational than for first post-rotational movements in the centrifugal direction. The force ratio was similar for last per-rotational and first post-rotational movements in the centripetal direction. For centrifugal movements, the ratio at the second load peak was smaller during last per-rotational than during first post-rotational movements (P<.04). For centripetal movements, the force ratio at second load peak was greater during last per-rotational than during first post-rotational movements (P<.01). In addition, force ratios at the first and second peak in load force were greater during first post-rotational than during last pre-rotational movements, regardless of movement direction (all P<0.05). The force ratio at mid-movement was greater for first post-rotational than for last per-rotational movements and last pre-rotational movements, regardless of movement direction (all P<.01). These findings suggest that subjects produced inefficiently elevated grip force levels after rotation had ceased. Thus, there was an obvious after-effect of the grip force adaptation to per-rotational performance that persisted during the first post-rotational movements. However, subjects improved to normal grip force values with increasing number of post-rotational movements, and all ratios were similar during the last post-rotational and last pre-rotational movements.
Temporo-spatial coupling between grip and load force profiles
The precision of the temporal coupling between grip and load force profiles was assessed by calculating the time lags between peak rates and peak forces in grip and load force (Table 1). Repeated measures ANOVAs were performed separately on the time lags between peak force rates and peak forces with the factors “session” (pre-, per- and post-rotation), “movement direction” (centrifugal and centripetal movement) and “early-late” (first and last movements) as main factors. For the time lags between peak force rates a single significant effect of “early-late” (F (1,7)=29.1, P<.001) and a significant interaction between “early-late”×”session” (F (2,14) =5.1, P<.05) were found. For time lags between force peaks a significant influence of “early-late” (F (1,7)=25.3, P<.01) and “session” (F (2,14)=6.6, P<.05), as well as significant interactions “early-late”×”rotation” (F (2,14)=4.6, P<.05) and “early-late”×”session”×”movement direction” (F (2,14)=4.5, P<.05) were found.
To describe the stability of the temporo-spatial modulation of the grip force profile with the load force profile, a linear regression analysis was carried out measuring grip force and load force during the movement course (compare Figs. 2 and 3). The r 2 correlation coefficients were calculated to assess the regularity and stability of the grip force modulation with the movement-induced load fluctuations during these phases. The slopes and the intercepts were calculated to describe the gain of modulation of the grip force profile with the load force profile. The group means of r 2 correlation coefficients, slopes and intercepts obtained from linear regression analyses are figured in Table 2. The following describes the results of post hoc analysis of the time lags performed on the statistical main effects as assessed by ANOVA, as well as the results of the linear regression analysis between grip and load force profiles.
Immediate effects of rotation and adaptation to the novel loading characteristics
The time lags between peak rates in grip and load force and between grip and load force peaks were significantly longer (all P<.04) for first per-rotational than for last pre-rotational movements (see Table 1). This finding suggests a disruption of the normally very close temporal coupling between grip and load force profiles during first per-rotational movements. In addition, the r 2 correlation coefficients between the times to peak force rates (P<0.04) and the times to peak forces (P<0.05) were significantly smaller for first per-rotational than for last pre-rotational movements (see Figs. 5 and 6). The r 2 coefficients between grip and load forces during the entire movement were smaller (P<0.04) and the slopes of the least square regression lines higher (P<0.04) for first per-rotational than for last pre-rotational movements (Table 2). All these observations suggest that the grip force profile is inaccurately modulated with the movement-induced loads and at a higher force level during the first per-rotational movements.

Plots of times to peak rates in grip force increase versus times to peak rates in load force increase for pre-, per- and post-rotational movements away from (centrifugal) and towards the trunk (centripetal). Data of all subjects are pooled. The r 2 correlation coefficients, slopes (sl.) and intercepts (int.) of the least square regression lines are indicated

Plots of times to grip force peaks versus times to load force peaks for pre-, per- and post-rotational movements away from (centrifugal) and towards the trunk (centripetal) Data of all subjects are pooled. The r 2 correlation coefficients, slopes (sl.) and intercepts (int.) of the least square regression lines are indicated
The time lags between peak rates of grip and load force increase and the time lags between grip and load force peaks were longer for the first than the last per-rotational movements (P<.01). The r 2 correlation coefficients between the times to peak rates (P<0.04) and the times to grip and load force peaks were smaller (P<0.02) during the first when compared to the last per-rotational movements (Figs. 5 and 6). The r 2 coefficients between grip and load forces for the entire movement were smaller (P<0.05) for the first than for the last per-rotational movements (Table 2). All these findings indicate that the temporal coordination between grip and load force profiles improved with increasing number of per-rotational movements performed. This suggests an ongoing adaptation to the rotation-induced loading requirements. The time lags between peak rates and peaks in grip and load forces were similar for the last pre- and the last per-rotational movements (P>0.2). In addition, the r 2 coefficients between grip and load forces for the entire movement were similar for last pre- and last per-rotational movements (P>0.5). The slopes of the least square regression lines, however, remained greater during the last per-rotational than during the last pre-rotational movements (P<0.01). These observations imply that during final per-rotational performance the grip force profile is modulated with similar precision with regard to the movement induced loads, but at a constantly higher force level when compared to pre-rotational performance.
Post-rotational after-effects
The time lags between peak rates in grip and load forces were longer during the first post-rotational than during the last per-rotational movements (P<0.01). However, the time lags between grip and load force peaks were similar for both first post-rotational and last per-rotational movements. The r 2 correlation coefficients between times to peak force rates (P<0.03) and times to peak forces (P<0.05) were smaller during the first post-rotational than during the last per-rotational movements (Figs. 5 and 6). These findings suggest impaired precision of the close temporal coupling between grip and load force profiles during the first post-rotational movements. The r 2 correlation coefficients between grip and load forces during entire movement were also smaller (P<0.01) during the first post-rotational than during the last per-rotational movements (Table 2). The slopes of the least square regression lines were similar during the first post-rotational and last per-rotational movements. These observations suggest that per-rotational adaptation produced an after-effect during post-rotational performance. This effect vanished with increasing number of post-rotational movements. All analyzed temporal parameters were similar for last post-rotational and last pre-rotational movements.
Discussion
The idea that we predict the consequences of our own actions has emerged as an important theoretical concept of sensorimotor control. Sensorimotor prediction refers to estimating future states of our motor system and is considered to involve representations of both our body segments and the environment (Blakemore et al. 1998; Flanagan and Johansson 2002; Flanagan and Wing 1997; Miall and Wolpert 1996; Wolpert and Flanagan 2001). Adapted to manual performance, predictive grip force control relies on internal models that capture the relationships between mechanical object properties and the forces required for their manipulation (Blakemore et al. 1998; Flanagan and Wing 1997; Wolpert and Flanagan 2001; Wolpert et al. 1995, 1998, 2001). Sensory feedback is used to acquire, maintain and update internal models (Flanagan and Johansson 2002).
We tested this theory by analyzing the time course of learning the load perturbations arising from a transport movement in a rotating environment. During per-rotational movements a Coriolis force and a centrifugal force were generated. The subjects were seated in the axis of rotation and did not perceive the rotation. They were therefore unaware of the load perturbations commencing during the first per-rotational movements. Referring to an internal forward model, the predicted sensory consequences of the voluntary movement and the actual sensory feedback experienced at the grasping fingertips were inconsistent. From this mismatch deficits of predictive grip force control must be suggested during the first per-rotational movements. However, the mismatch between predicted and actual sensory input should also trigger corrective responses along with an updating of the relevant internal models used to predict sensory events and estimate the motor commands required (Flanagan and Johansson 2002; Wolpert and Flanagan 2001). In other words, learning of the novel loading characteristics and successive adaptation, as well as persistence of this learning effect following rotation must be expected. All these expectations were found to hold true during the present experiments.
Coordination of grip and load force magnitudes
The coupling between grip and load forces during pre-rotational movements was consistent with the descriptions of Flanagan and Wing for horizontal point-to-point arm movements in normal gravity (Flanagan and Wing 1993). During per-rotational movements the movement-induced load profile changed dramatically. During initial per-rotational movements subjects established inefficiently elevated grip forces in relation to the loads. An inefficient increase in grip force is a provisional control strategy to ensure the grasp in situations of stress or when the sensorimotor system challenges external perturbations (Johansson and Edin 1993; Johansson et al. 1992a, 1992b; Johansson and Westling 1988; Nowak et al. 2001, 2002a). With increasing familiarity increasing precision in coupling between grip and load force magnitudes towards the last per-rotational movements was evident (see Fig. 4). For certain time points within the movement course the force ratio was similar during the last per-rotational and pre-rotational movements. These findings suggest adaptation of the grip force level to the novel loading requirements within 40 per-rotational movements.
Flanagan and Wing demonstrated that healthy subjects are able to learn various load characteristics imposed on a hand-held object (Flanagan and Wing 1997). Subjects pushed and pulled a manipulandum, on which different loads (inertial, viscous, and composite loads, including inertial, viscous and elastic components) were applied. The perturbation acted directly on the external object at hand. Thus, the question was if subjects learn to predict the object’s behavior as reflected in the grip force adjustments produced to establish a stable grasp. Indeed, subjects modulated grip force in parallel and following a learning period were able to anticipate fluctuations in load force for all loading conditions. A maximum of 10 to 20 trials were necessary to achieve a stable performance. This study demonstrates that we are able to learn the behavior of external objects when it becomes predictable. In a subsequent study on motor learning involving the manipulation of an object with novel dynamics, Flanagan and colleagues proved that subjects learned to predict the consequences of their movements before they master control over them. Results showed that subjects could predict the consequences of their movement, as measured by predictive grip force adjustments, but could not as rapidly master control over their action, as evident from persistent deviations of the arm movement trajectory from the intended movement path.
Interestingly, we also observed a rapid learning of the highly unfamiliar loads when transporting hand-held objects in a changing gravity environment (Hermsdörfer et al. 2000; Nowak et al. 2001). During parabolic flights the gravity changes occurred in a reproducible manner and thus, following a period of learning they became predictable. Here the perturbation acted on both the moving limb and on the external object at hand. Subjects accurately adjusted their grip force to the novel load profile within a few movements performed under micro- and hypergravity. The results of the present study are able to expand and modify this previous data by indicating that we are able to learn the behavior of an external force field as long as it is predictable.
Similarly, a fast and accurate motor adaptation to Coriolis force perturbation was described for reaching movements performed in a rotating environment (DiZio and Lackner 1995; Lackner and DiZio 1994, 1998). Lackner and DiZio reported almost complete adaptation of the arm trajectory to the Coriolis force perturbation within 10 reaching movements performed nonparallel to the axis of rotation in a rotating chamber (DiZio and Lackner 1995, 2000a; Lackner and DiZio 1994, 1998). This adaptation occurred even when visual information about the movement path was lacking as shown in the present experiments.
Temporo-spatial coupling between grip and load force profiles
Skilled manual performance involves feedforward and feedback mechanisms. When we manipulate objects that exhibit stable physical properties, predictive control mechanisms can effectively be exploited. However, when the object’s behavior is unpredictable, sensory feedback provides the most useful information to trigger corrective force responses (Häger-Ross and Johansson 1996; Johansson et al. 1992a, 1992b; Johansson and Westling 1984; Macefield et al. 1996). In the present experiments, the load profile during the first per-rotational movements was indeed unpredictable and grip force was probably modified in response to sensory feedback from the moving limb and grasping fingertips. Consequently, grip force tended to lag behind load force. This is indicated by the longer time lags between peak rates of increase and peak values of grip and load force during the first per-rotational movements.
The temporo-spatial coupling between grip and load force was described by correlation analyses between the times to peak rates of increase and times to force peaks in grip and load force. In addition, a correlation analysis between grip and load forces during the entire movement course was performed (Nowak et al. 2002b). The slopes of the least square regression lines are indicators for the gain of modulation between grip and load force profiles. The r 2 correlation coefficients describe the stability and regularity of the coupling between grip and load force profiles. Smaller correlation coefficients indicated impaired precision and stability of the temporo-spatial coupling between the grip and load force profiles during the first per- and post-rotational movements. This observation demonstrates that the highly automatized co-ordination between grip and load force profiles was disrupted by the substantial load perturbations imposed on the hand-held object moved in a rotating environment. However, with increasing number of per-rotational movements a more precise and stable coupling between grip and load force profiles occurred. Similar correlation coefficients during the last per-rotational and pre-rotational movements suggest a complete adaptation to the novel loading requirements during rotation. However, the gain of modulation of the grip force profile with the load profile (as expressed by the slopes of the least square regression lines) was constantly greater during per-rotational than during pre- and post-rotational movements. This difference indicates a disproportional increase of the grip force level in relation to the movement-induced loads during per-rotational performance. The fast temporal adaptation of grip force profile to Coriolis and centrifugal force perturbations may result from our experience with grasp and transport movements performed during simultaneous torso rotations in everyday life. For example, our sensorimotor experience with turning and reaching movements could have established an internal model related to Coriolis force perturbations. Indeed, efficient anticipation of self-generated Coriolis forces during natural turning and reaching movements has recently been demonstrated (Bortolami et al. 1999; Pigeon et al. 2003).
After-effects following adaptation to Coriolis force perturbation
When healthy subjects rotating in an enclosed room performed reaching movements to a visual target, substantial curvilinear deviations from the desired movement path and endpoint errors occurred in the direction of the Coriolis force generated during the reaching movements (Lackner and DiZio 1994, 1998). Within 10 reaches, subjects adapted almost completely to the Coriolis perturbation and moved in straight paths to the target position. When rotation ceased, subjects again made reaching errors with the adapted arm. The endpoints and movement paths were initially deviated in the direction opposite to the Coriolis perturbation indicating a persistent after-effect. We observed a similar after-effect of grip force adaptation to the per-rotational loading requirements. The ratio between grip and load force was significantly greater during the first post-rotational than during the pre- and last post-rotational movements, suggesting inefficiently high grip force levels. In addition, correlation analyses of the temporo-spatial coupling between grip and load force profiles revealed a less precise coordination during the first post-rotational when compared to the last per-rotational and the pre-rotational movements.
Mechanisms of registration and integration of novel environmental demands
Knowledge about the state of our body (for example, the position and velocities of our upper limbs) and of external objects we interact with are both essential for accurate control of grip force. This knowledge is most likely provided by internal models that give an estimate of the future state by predicting the sensory input generated by a voluntary movement (Flanagan and Johansson 2002; Wolpert and Flanagan 2001). Disturbances of the intended movement by external perturbation cause a mismatch between predicted and actual sensory inputs. Such a mismatch results in corrective movements and in an updating of the relevant internal models. Cutaneous mechanoreceptors of the grasping digits seem to play a major role to sense external load perturbations during restraint of an object that imposes sudden and unexpected load perturbations to the grasp (Johansson et al. 1992a, 1992b; Johansson and Westling 1988).
However, proprioceptive feedback from muscle and joint receptors could supply provisional information (Häger-Ross et al. 1996; Häger-Ross and Johansson 1996). This suggestion has been given ample support by anaesthesia studies. These studies provide evidence that precise temporal coupling between grip and load force profiles during arm movements with a hand-held object is not disturbed by digital anaesthesia applied to the grasping fingers (Nowak et al. 2002a). During the present experiments, both cutaneous and proprioceptive feedback from the moving limb segments may have contributed to sensing the rotation-induced load perturbations necessary to adjust the grip force profile accordingly.
Information from vestibular organs was not available in the present experiments and thus, could not contribute to sensing the load perturbations imposed on a hand-held object during transport movements in a rotating environment. DiZio and Lackner recently demonstrated an equally complete adaptation of the movement curvature during reaching movements in a rotating environment for healthy and labyrinthine defective subjects (DiZio and Lackner 2000a). Visual information was not provided during the present experiments. This information is obviously not of major importance for motor adaptation to Coriolis force perturbation since congenitally blind subjects performed complete trajectory and endpoint adaptation to Coriolis force perturbation when carrying out reaching movements in a rotating environment (DiZio and Lackner 2000b).
Conclusion
This study contributes further proof to the theory that predictive grip force control relies on internal models that capture the relationships between mechanical object properties and the forces required for their manipulation (Flanagan and Johansson 2002; Wolpert and Flanagan 2001). We tested the ability of healthy subjects to learn a novel force field when moving a hand-held object in a rotating chamber. During the first per-rotational movements the produced grip force profile did not match the rotation-induced alterations in the load profile. However, a predictive grip force scaling was established after a few practice moves. This finding suggests that subjects learned the novel loading characteristics and implemented them inside the relevant internal models used to regulate grip force accordingly. A significant after-effect was observed for the first movements performed after rotation had ceased, implicating persistence of the learned adaptation.
References
Blakemore SJ, Goodbody SJ, Wolpert DM (1998) Predicting the consequences of our own actions: the role of sensorimotor context estimation. J Neurosci 18:7511–7518
Bortolami SB, Pigeon P, Lackner JR, DiZio P (1999) Self-generated Coriolis forces on the arm during natural turning and reaching movements. Soc Neurosci Abstr 25:1912
Cohn JV, DiZio P, Lackner JR (2000) Reaching during virtual rotation: context specific compensations for expected Coriolis forces. J Neurophysiol 83:3230–3240
Cole KJ, Rotella DL, Harper JG (1999) Mechanisms of age-related changes for fingertip forces during precision gripping and lifting in adults. J Neurosci 19:3238–3247
Dichgans J, Brandt T (1994) The psychophysics of visually induced perception of self-motion and tilt. In: Schmidt FO, Worden FG (eds) The neurosciences. MIT Press, Cambridge, MA, pp 123–129
DiZio P, Lackner JR (1995) Motor adaptation to Coriolis force perturbations of reaching movements: endpoint but not trajectory adaptation transfers to the non-exposed arm. J Neurophysiol 74:1787–1792
DiZio P, Lackner JR (2000a) Congenitally blind individuals rapidly adapt to Coriolis force perturbations of their reaching movements. J Neurophysiol 84:2175–2180
DiZio P, Lackner, JR (2000b) Coriolis-force-induced trajectory and endpoint deviations in the reaching movements of labyrinthine-defective subjects. J Neurophysiol 85:784–789
Flanagan JR, Johansson RS (2002) Hand movements. In: Ramshandran VS (ed) Encyclopedia of the human brain, vol 2. Academic Press, San Diego, pp 399–414
Flanagan JR, Vetter P, Johansson RS, Wolpert DM (2003) Prediction precedes control in motor learning. Curr Biol 13:146–150
Flanagan JR, Wing AM (1993) Modulation of grip force with load force during point-to-point movements. Exp Brain Res 95:131–143
Flanagan JR, Wing AM (1995) The stability of precision grip force during cyclic arm movements with a hand-held load. Exp Brain Res 105:455–464
Flanagan JR, Wing AM (1997) The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci 17:1519–1528
Häger-Ross C, Cole KJ, Johansson RS (1996) Grip-force responses to unanticipated object loading: load direction reveals body- and gravity-referenced intrinsic task variables. Exp Brain Res 110:142–150
Häger-Ross C, Johansson RS (1996) Nondigital afferent input in reactive control of fingertip forces during precision grip. Exp Brain Res 110:131–141
Hermsdörfer J, Marquardt C, Zierdt A, Philipp J, Nowak DA, Mai N (2000) Moving weightless objects: Grip force control during microgravity. Exp Brain Res 132:52–64
Hermsdörfer J, Hagl E, Nowak DA, Marquardt C (2003) Grip force control during object manipulation in cerebral stroke. Clin Neurophysiol 114:951–929
Johansson RS, Edin BB (1993) Predictive feedforward sensory control during grasping and manipulation in man. Biomed Res 14:95–106
Johansson RS, Riso R, Häger C, Bäckström L (1992a) Somatosensory control of precision grip during unpredic pulling loads. I. Changes in load force amplitude. Exp Brain Res 89:181–191
Johansson RS, Häger C, Riso R (1992b) Somatosensory control of precision grip during unpredictable pulling loads. II. Changes in load force rate. Exp Brain Res 89:192–203
Johansson RS, Westling G (1984) Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp Brain Res 56:550–564
Johansson RS, Westling G (1988) Programmed and triggered actions to rapid load changes during precision grip. Exp Brain Res 71:72–80
Lackner JR, DiZio P (1994) Rapid adaptation to Coriolis force perturbation of arm trajectory. J Neurophysiol 72:299–313
Lackner JR, DiZio, P (1998) Adaptation in a rotating artificial gravity environment. Brain Res Rev 28:194–202
Macefield VG, Häger-Ross C, Johansson RS (1996) Control of grip force during restraint of an object held between finger and thumb: Responses of cutaneous afferents from the digits. Exp Brain Res 108:155–171
Miall RC, Wolpert DM (1996) Forward models for physiological motor control. Neural Networks 9:1265–1279
Nowak DA, Hermsdörfer J, Philipp J, Marquardt C, Glasauer S, Mai N (2001) Effects of changing gravity on anticipatory grip force control during point-to-point movements of a hand-held object. Motor Control 5:231–253
Nowak DA, Glasauer S, Meyer L, Mai N, Hermsdörfer J (2002a) The role of cutaneous feedback for anticipatory grip force adjustments during object movements and externally imposed variation of the direction of gravity. Somatosens Motor Res 19:49–60
Nowak DA, Hermsdörfer J, Marquardt C, Fuchs HH (2002b) Grip and load force coupling during vertical arm movements with a grasped object in cerebellar atrophy. Exp Brain Res 145:28–39
Nowak DA, Hermsdörfer J (2003) Digit cooling influences grasp efficiency during manipulative tasks. Eur J Appl Physiol 89:127–133
Pigeon P, Bortolami SB, DiZio P, Lackner JR (2003) Coordinated turn-and reach movements. I. Anticipatory compensation for self-generated Coriolis and interaction torques. J Neurophysiol 89:276–289
Sperry RW (1950) Neural basis of spontaneous optokinetic responses produced by visual inversion. J Comp Physiol Psychol 43:482–489
Von Holst E (1950) Relations between the central nervous system and the peripheral organs. Brit J An Behav 2:89–94
Wolpert DM, Flanagan JR (2001) Motor prediction. Curr Biol 11:729–732
Wolpert DM, Ghahramani Z, Jordan MI (1995) An internal model for sensorimotor integration. Science 296:1880–1882
Wolpert DM, Miall RC, Kawato M (1998) Internal models in the cerebellum. Trends Cogn Sci 2:338–347
Wolpert DM, Ghahramani Z, Flanagan JR (2001) Perspectives and problems in motor learning. Trends Cogn Sci 5:487–494
Acknowledgements
This research was supported by a grant of the European Neurological Society (ENS Fellowship stipend) to Dennis A. Nowak. The authors are indebted to John C. Rothwell for his valuable comments on an earlier draft of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Nowak, D.A., Hermsdörfer, J., Schneider, E. et al. Moving objects in a rotating environment: rapid prediction of Coriolis and centrifugal force perturbations. Exp Brain Res 157, 241–254 (2004). https://doi.org/10.1007/s00221-004-1839-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-004-1839-8