
Abstract
Three experiments investigated the grip force exerted by the fingers on an object displaced actively in the near-body space. In one condition (unimanual) the object was held by one hand with the tripod grip and was moved briskly back and forth along one of the three coordinate directions (up–down, left–right, near–far). In the second condition (bimanual) the same point-to-point movements were performed while holding the object with the index and middle fingers of both hands. In the third condition (bimanual) the object was held as in the second condition and moved along a circular path lying in one of the three coordinate planes (horizontal, frontal, sagittal). In all conditions participants were asked to exert a baseline level of grip force largely exceeding the safety margin against slippage. Both grip forces and hand displacements were measured with high accuracy. As reported in previous studies, in the two point-to-point conditions we observed an upsurge of the grip force at the onset and at the end the movements. However, the timing of the transient increases of the grip force relative to hand kinematics did not confirm the hypothesis set forth by several previous studies that grip modulation is a pre-planned action based on an internal model of the expected effects of the movement. In the third condition, the systematic modulation of the grip force also for circular movements was again at variance with the internal model hypothesis because it cannot be construed as a pre-planned action aiming at countering large changes in dynamic load. We argue that a parsimonious account of the covariations of load and grip forces can be offered by taking into account the visco-elastic properties of the neuromuscular system.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Lifting inanimate, stationary objects with the precision finger grip involves two sequential and semi-independent controls. In the approach phase, in order to secure a stable grasp, fingers must be pre-shaped to fit the visually perceived size and form of the object (Jakobson and Goodale 1991; Jeannerod 1981, 1984, 1986; Jeannerod et al. 1995; Paulignan et al. 1990; von Hofsten and Rönnqvist 1988; Wallace and Weeks 1989). In the subsequent lifting phase, grasp force must be calibrated by taking into account the anticipated frictional contact forces and the load forces, which depend jointly on the weight of the object and on the acceleration of the movement.Footnote 1 Both cognitive and automatic processes contribute to the calibration of grasp force, their relative importance depending on the familiarity of the object. It is often assumed (e.g., Johansson 1998) that the interplay between these two processes is mediated by a parametric internal model embodying the assumed properties of the to-be-lifted object. The model specifies how the grasp force covaries with the force necessary to overcome gravity and to impress the required acceleration to the object without slippage. In adults a common finding is that during the initial phase of the lift of a familiar object, the two forces increase pari passu and that the former exceeds the latter by a safety margin, which depends on the estimated frictional properties of the object’s surface (Johansson and Westling 1984, 1987) and on its estimated fragility (Gorniak et al. 2010). Clinical studies (Forssberg et al. 1999; Gordon and Duff 1999; Duque et al. 2003) have shown that impaired anticipatory control and abnormal timing of grip-load force coordination result from brain lesion, suggesting that this functional coordination is subserved by a parallel distributed system. More recently, Raghavan et al. (2006) argued that lesion-induced deficits in grip-load coordination can be parsed into a motor planning and a motor execution component. Specifically, using a transfer paradigm with patients with right sensorimotor lacunal syndrome, these authors provided evidence of a selective impairment of anticipatory control independent of an execution deficit.
The default setting of the model parameters may turn out to be inadequate. According to the prevailing view, the required adjustment is not achieved by cortical reflexes activated by proprioceptive afferences, because the incurring delays (about 90 ms; Johansson and Westlings 1987; Cole and Abbs 1988) would be too long. Faster adjustments aimed primarily at maintaining a constant safety margin are instead possible by comparing (in a feed-forward control mode) actual and expected inputs from the cutaneous mechanoreceptors in the glabrous skin of the fingers (Johansson 1991; Johansson and Westling 1984, 1987; Johansson et al. 1992a, b, c; Macefield et al. 1996).
In everyday life situations lifting an object with a precision finger grip often involves rather modest accelerations. Thus, load and grasp forces are programmed mostly to cope with the expected weight of the object. Inertial forces may instead become a significant component of the total load when a grasped object is moved around (Flanagan et al. 1993; Flanagan and Wing 1993, 1995; Flanagan and Tresilian 1994; Gao et al. 2005; Kinoshita et al. 1993, 1995; Smith and Soetching 2005; Winges et al. 2007; Zatsiorsky et al. 2005). Flanagan and Wing (1993) investigated the relation between grip and load forces during vertical and horizontal point-to-point arm movements. The relative strength of inertial and gravitational components of the load was manipulated by varying velocity and direction of the movement. By showing that grip force is modulated in step with the total load, the results generalized the earlier finding by Johansson and Westling (1984) of a coupling between the two forces. During vertical movements inertial and gravitational forces are collinear and the total load is their algebraic sum. For upward movements they add in the initial accelerating phase and subtract toward the end of the movement. The opposite is true for downward movements. In both cases amplitude and timing of the total load were highly correlated with amplitude and timing of the grip forces. When movements are in the horizontal plane, gravity is orthogonal to the imposed accelerations and the total load results from the vector sum of the two corresponding forces. Thus, unlike the case of vertical movements, load force peaks were found to be similar at both movement ends. Grip force tended to remain high during the movement and was not as closely modulated by load force as in vertical movements. In all cases, however, the times of occurrence of grip and load forces maxima were closely correlated. Because the correlation was maintained across intentional modulations of movement velocity and acceleration, and because reflexive responses to load modulations would not be sufficiently fast to secure a safety margin against slippage, Flanagan and Wing (1993) argued that grip forces are planned along with the commands responsible for the movements according to an anticipatory control scheme.
The notion that grip force modulations result from a model-based prediction of the expected load gained support from later studies (Davidson and Wolpert 2005; Flanagan and Wing 1997; Flanagan et al. 1995; Witney and Wolpert 2007). Flanagan and Tresilian (1994) showed that grip and load forces remain linked when objects are moved while held with grips other than the usual index-thumb precision grip and also when load changes are induced by having the subject jump while holding the object, i.e., without involving the arm-hand effector system. Flanagan and Wing (1995) confirmed the linkage by contrasting the results when the baseline grip force was varied either indirectly, by using objects with rough or smooth contact surfaces, or directly, by instructing participants to do so. Finally, Flanagan and Wing (1997) measured grip forces when the manipulated object was coupled to a servo-controlled motor so that the load could be predominantly inertial, viscous or elastic. Parallel covariations of load and grip forces were observed in all three conditions. The correspondence between the time course of transport and grip forces in the unimanual case, where independent control is a priori possible, as well as the fact that the coordination between these two forces cannot be abolished voluntarily (Haggard 1992; Haggard and Wing 1991; Flanagan and Wing 1993), has been taken to suggest that they are jointly specified within a proactive control scheme integrating the dynamics of the object into an internal model of the motor apparatus as a whole (Flanagan and Tresilian 1994). Specifically, the output to the neuromuscular system responsible for transport would be forwarded also to the grasp controller so as to allow the controller to anticipate the load changes associated with the movement.
At least one line of research has questioned the validity of the internal model hypothesis (Feldman and Latash 2005; Feldman et al. 1998; Yang et al. 2007) suggesting that the findings that have motivated the hypothesis can be accounted for by considering the interaction between the biomechanics of the hand, the forces acting on the hand, and its neural control (Pilon et al. 2007). With more specific reference to the grasp control issue, we note that at least one published result seems inconsistent with the internal model hypothesis. As mentioned above, in their Experiment 3 Flanagan and Wing (1995) reported that the modulatory effect of the load persists even when the baseline grip force is intentionally set to a much higher value than required to avoid slippage. One may then wonder why a further increase in the grip force is deemed necessary.
In summary, across a variety of load conditions, grip forces were found to be calibrated in step with the weight of the object, the frictional properties of its surface, and the expected inertial forces (for a review, Zatsiorky and Latash 2008). It seems indisputable that, whenever the implicit constraint is to make sure that the object is either lifted or moved around in a stable way with a subjectively chosen security margin, the expected properties of the object set a baseline level of grasp force. When load forces depend mostly on the movements of the hand (inertial loads), the time-varying modulations around this baseline have suggested a further level of predictive feed-forward control. The general aim of our study is to explore the possibility that the interplay between load and grasp forces after lift-off can be accounted for without invoking this further control level. In doing so we will focus mainly on the temporal relationship between inertial and grip forces.
In the first experimental session (point-to-point movements, unimanual grip) we measure grip forces in response to very large variations of the inertial forces along the three main orientations (transversal, frontal and sagittal). As in the study by Flanagan and Wing (1995), the baseline grasp force was set to a very high value. Moreover, the possibility of an accidental slippage was totally eliminated by shaping appropriately the load to be moved. The goal of the second session (point-to-point movements, bimanual grip) was to extend the analysis of the temporal coordination of grasp and load forces to the case in which the movement involves the coordinated action of both hands. As in the first session, the risk of load slippage was minimized by the shape of the load and by asking the participants to exert a large baseline force. Inertial forces were again generated by moving the load along the three main orientations with fast point-to-point transport movements. The significant difference between the unimanual and bimanual condition is that in the first case active forces for moving and holding the load could in principle be controlled independently. By contrast, in the bimanual condition the total grip force is the sum of the contribution of both hands, and to move the load one must necessarily alter the balance between these two forces. Inevitably, the grip force acting on the load must change during the transport.
In the third main session we investigated bimanual grip when the required movement was continuous and circular rather than point-to-point and rectilinear. Here instead of having sharp peaks in a single direction, the components of the inertial load varied continuously with maxima alternating in the two directions defining the movement plane. Thus, we asked whether a concurrent modulation of the grip force was still present and, if so, which relation exists with the grip force changes measured in the first two sessions.
Taken together the results question the need to invoke a further level of on-line predictive control beyond the one that sets the baseline level of grasp force. With the help of a simulation, we argue in fact that the time-varying modulations of the grasp force around the baseline can be predicted more parsimoniously by taking into account the visco-elastic properties of the neuromuscular system.
Methods
Participants
Ten young male adults (age range 22–31) participated in the experiments and received 10 Euro for their services. All participants were right handed (as assessed by a short questionnaire based on the Edinburgh scale) and had no past history of neurological disorders. Participants gave written informed consent to procedures approved by the Institutional Review Board of Santa Lucia Foundation, in conformity with the Declaration of Helsinki on the use of human subjects in research. They were otherwise unaware of the purpose of the experiments.
Apparatus and protocol
The experiments were run in a quiet room with normal artificial illumination. Participants seated at 2.5 m from the device for measuring hand displacements (Optotrak, Northern Digital Inc., Waterloo, Canada, Mod. 3020; precision at ±3σ: 0.2 mm; RMS-accuracy: 0.1–0.15 mm in each direction according to manufacturer’s information). Grip force was measured with a 6-degrees-of-freedom force transducer (ATI Nano25-E, Apex, NC, USA). Within the operating range of the transducer (0–500 N for axial forces; 0–125 for transversal forces; 0–3 Nm for torques), resolution was 1/16 N for axial force and 1/48 N for transversal forces. Forces were measured with a 16-bit resolution. Displacement and force were sampled synchronously (500 samples/s) and stored for further processing.
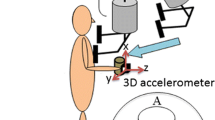
For the three main experimental sessions (see below), the force transducer and the Optotrak active markers were mounted on a plastic frame machined to allow either a comfortable three-finger grip with the right hand (first session, Fig. 1a) or a comfortable four-finger grip with the index and the medium fingers of both hands (second and third session, Fig. 1b). In the following, the unimanual condition will be referred to as U-grip and both bimanual conditions (point-to-point and continuous) as B-grip. In the U-grip session the neutral position of the plastic frame was to the right of the trunk, with the forearm flexed by about 90°. In the B-grip session the neutral position of the plastic frame was in the sagittal body plane at the height of the stomach, approximately 25 cm away from the trunk. In both point-to-point sessions, participants were asked to perform fast back-and-forth linear movements centered on the neutral position. The amplitude of the movement was indicated by physical markers spaced by 40 cm. It was stressed that transitions between movement end-points had to be as fast as possible and that the position at the end-points should be maintained as stable as possible. In the third session participants had to move continuously along a circular path the support frame held by both hands. The amplitude of the movement was indicated by physical markers placed along one axis (transversal, vertical and sagittal for movements in the horizontal, vertical and sagittal plane, respectively). Participants were instructed to try and equalize the two orthogonal diameters of the path.

Force transducer and Optotrak target mounted on the holding frame. a Unimanual grip (session 1). b Bimanual grip (sessions 2 and 3). c Holding frame mounted on a handle (control session)
The duration of a complete point-to-point movement cycle (left to right and back in the point-to-point sessions) was set at 2.4 s. Participants were free to choose how to phase-lock their movements to the beats, the only requirement being that a cycle had to include two beats. For circular movements participant had to complete one full rotation in 1.2 s. Timing was controlled by an electronic metronome. We asked participants to exert a constant grip force throughout the movement, so as to hold the manipulandum firmly and to keep its orientation in space as accurately as possible. In practice, the adopted baseline grip force was about 50 % of the maximum value of which each participant was capable. The baseline force varied considerably among participants (see Results), but in all cases it exceeded by far the level required to safely hold and move around the supporting frame.
Sessions included three series of 10 continuous recordings. Each recording lasted 15 s and included at least five complete movement cycles. Pauses were allowed between recordings to avoid fatigue. Series differed in the spatial orientation of the movements. In point-to-point sessions, the X (transversal), Y (vertical), and Z (sagittal) orientations were tested sequentially in this order. One half of the participants were tested first in the U-grip condition and then in the B-grip condition. The order was inverted for the remaining half. The continuous circular condition (third session) was tested on a subset of five participants after completing the point-to-point sessions. Circular counterclockwise movements lying in the three coordinate planes (XZ, horizontal; XY, frontal; YZ, sagittal) were performed sequentially in this order. Conditions were tested in different days. Note that in the X (transversal) sessions inertial and grasping forces were aligned and summated algebraically to yield the measured grip force. In the other two sessions, inertial and grasping forces are roughly orthogonal so that grip and grasp forces coincide.
After the third session, the same five participants were also tested in a control condition in which the B-grip point-to-point task was replicated by asking to hold the force transducer directly with the tips of the index and middle fingers, without the help of plastic frame. Finally, one participant served in a calibration session in which we measured the load force induced by the acceleration acting on the frame, when no external force was actually exerted on the transducer. To this end, the frame was fastened to a handle (Fig. 1c) and moved by the right hand along the three orientations with the same spatial and temporal constraints as in the main sessions.
Data processing and analysis
The transducer measured the three components of the force and the three torques acting on the manipulandum. However, we analyzed only the component of the force aligned with the X-axis of the transducer. Movements in the point-to-point conditions were not perfectly straight, but we analyzed only the displacement component aligned with the general direction of the movement. Complete movement cycles within each of the 10 continuous recordings were isolated by detecting the first velocity maximum (Phase 1) along the main movement direction. By convention, first time derivatives were set as positive when moving from left to right (X-series), from down to up (Y-series) and from near the body to away from the body (Z-series), and negative in the opposite cases. Within a movement cycle, there were always two positive and two negative extrema of the second derivative. By definition, a complete cycle of movement included the transition from one end-point to the other (Phase 1) and the transition in the opposite direction (Phase 2, cf Fig. 2). The first positive (in Phase 1) and the second negative peak (in Phase 2) corresponded to acceleration phases of the movement. The first negative (in Phase 1) and the second positive (in Phase 2) peak corresponded to deceleration phases. Movements in the continuous condition deviated significantly from the prescribed circular path and were not perfectly planar. However, the two main components for each orientation were always reasonably good approximations to harmonic functions. Complete cycles were again isolated by identifying the positive peaks of the X velocity component for horizontal and frontal planes and of the Y component for the sagittal plane. To verify that this choice did not bias the results, we repeated the analysis by using the Y component for the frontal plane and the Z component for the horizontal and sagittal plane. Aside from a quarter-period phase shift, the grip force profiles emerging from the two analyses were practically indistinguishable.

U-grip with holding frame (session 1, all participants). a transversal (X) direction. b vertical (Y) direction. c sagittal (Z) direction. Lower panels displacement (thick lines) and its second time derivative (thin lines). Upper panels grip force along the X axis normalized to the average computed over a movement cycle. 95 % confidence bands (thin lines) take into account both within-participant variability across all complete cycles of movement, and between-participants variability. In both panels time is normalized to the average movement period. Maxima (filled dots) and minima (circles) are shown for both force and second time derivative of the displacement. With the adopted sign convention, the first maximum and the second minimum of the second time derivative correspond to accelerations; the first minimum and the second maximum correspond to decelerations
In the next step of the processing, for all sessions we measured cycle duration (T) and peak-to-peak movement amplitude (A) for all complete cycles within each recording period (15 s). Both displacement and the corresponding force within each movement cycle were then resampled using linear interpolation, normalized to a unit duration, and averaged within and across recordings. For point-to-point sessions, we also performed a more detailed analysis by measuring individually timing and amplitude of the extrema of second time derivative of the average displacement. We also identified timing and amplitude of the minima and maxima of the relative force by detecting the zero crossing of its time derivative. Unlike displacement traces, in some cases force traces displayed several minima and maxima. However, one absolute maximum and one absolute minimum could always be identified unambiguously in both phases. The same procedure for detecting minima and maxima of acceleration and force was followed to summarize the results at the population level. In this case, displacement and force cycles were averaged across recordings and participants. The significance levels of the statistical tests were computed with ANOVA (General Linear Model with repeated measures) after applying the Greenhouse-Geisser correction for non-sphericity.
Results
Point-to-point movements
The main findings are summarized in Figs. 2 (U-grip) and 3 (B-grip) by the population averages of movement kinematics and grip force. Each pair of panels in both figures shows the results for one of the tested orientations of the movement (A: X, transversal, B: Y, frontal, C: Z, sagittal). In the lower panels, we plot one complete time-normalized cycle of movement and the corresponding acceleration profile. In the upper panels, we plot the grip force profile normalized to the average force across the cycle. Over and above the qualitative differences among conditions, the results show that grip force increased in correspondence with the transitions between target end-points. Note that force peaks are superposed to steady levels exceeding by far those sufficient to hold firmly the sensor-carrying frame.

B-grip with holding frame (session 2, all participants). Same format as Fig. 2
The population means of movement amplitude A and cycle duration T were extremely close to the corresponding target values (m A = 40.025 cm and m T = 2.400 s). Statistical analysis (two-way, 2 [Grip] × 3 [Orientation]) showed that movement amplitude was unaffected by either grip mode (unimanual vs. bimanual; F(1,9) = 0.029, P = 0.869) or orientation (F(2,18) = 1.858, P = 0.192). Moreover, neither grip nor orientation affected cycle duration (F(1,9) = 1.685, P = 0.230; F(2,18) = 2.629, P = 0.108, respectively). Significant differences emerged from the analysis of the transitions between movement end-points (four-way: 2 [Grip] × 3 [Orientation] × 2 [Acceleration sign] × 2 [Phase]). Peak (absolute) values of accelerations and decelerations were not statistically different (averaging over grip mode, direction and phase: 1038.30 vs. 1063.54 cm/s2, F(1,9) = 0.506, P = 0.495), and interacted only marginally with movement direction (F(2,18) = 5.002, P = 0.037). Movements tended to be more jerky (higher acceleration peaks) with the U-grip than with the B-grip (averaging over orientation, acceleration sign and phase, U-grip: 1246.70, B-grip: 854.14 cm/s2, F(1,9) = 5.171, P = 0.049). Accelerations depended on movement orientation (averaging over grip, acceleration sign and phase, X: 1077.37, Y: 1213.78, Z: 860.10 cm/s2, F(2,9) = 11.162, P = 0.001) and phases (averaging over grip mode, orientation and acceleration sign, Phase 1: 1225.21, Phase 2: 875.62 cm/s2, F(1,9) = 19.191, P = 0.002). Grip mode interacted with orientation (F(2,18) = 8.126, P = 0.003) and phase (F(1,9) = 6.871, P = 0.028) indicating that the acceleration difference between grips was larger in the X-orientation than in the other two orientations and also larger in Phase 1 than in Phase 2. A three-way analysis (2 [Grip] × 3 [Orientation] × 2 [Phase]) of the differences between the peak value times of decelerations and accelerations confirmed the above findings by showing that transitions were faster (F(1,9) = 77.894, P ≪ 0.001) in Phase 1 (0.207 s) than in Phase 2 (0.235 s). The analysis also demonstrated significant differences (F(2,18) = 13.315, P = 0.001) across movement orientations (X: 0.204 s, Y: 0.213 s, Z: 0.246).
Acceleration and deceleration differences between phases are likely to reflect an asymmetry in the action of the activated muscle groups. Moreover, at least in the case of vertical movements, the asymmetric action of gravity may also have played a role. To factor out the effects of these orientation-dependent asymmetries, we performed three additional analyses (2 [Grip] × 2 [Phase]), one for each orientation separately, in which accelerations and decelerations were averaged (see above). The [Grip] × [Phase] interactions showed that in the X orientation the drop in acceleration between Phase 1 and Phase 2 was far stronger (F(1,9) = 12.339, P = 0.007) with the U-grip than with the B-grip. This differential effect of the grip was smaller in the Z orientation (F(1,9) = 5.951, P = 0.037) and disappeared altogether in the Y orientation (F(1,9) = 0.091, P = 0.770).
Table 1 summarizes the salient performance parameters in U- and B-grip conditions. As noted above, the amplitude (Amp) and period (Per) of the movement, as well as both peaks of force (T fmax1, T fmax2), were virtually indistinguishable in the two conditions. This is emphasized in Fig. 4 showing the temporal relationship between the peaks of acceleration/deceleration and the peaks of the grip force. The two leftmost panels are relative to the U- and B-grip sessions, respectively. The rightmost panel is relative to the control session (see below). The data illustrate the high stability across participants of the points in time where accelerations and decelerations occurred within cycles. More importantly, they qualify the observation (see Figs. 2, 3) that grip force surged quite consistently within the fast transitions, almost always within the narrow time interval between acceleration and deceleration peaks. Table 2 reports the statistical tests on the relative timing of accelerations, decelerations and force. For movements along the transversal axis, the timing of the force peak (T fmax1/T fmax2) in both grip conditions was statistically indistinguishable from the timing of the deceleration (T dec1/T dec2) and significantly different from the timing of acceleration peaks(T acc1/T acc2). With two exceptions, the same pattern was found also for the vertical and sagittal axes.

Temporal relationship between force (filled dots) and acceleration/deceleration (circles) peaks for the indicated conditions and movement orientations (X transversal; Y vertical; Z sagittal). The vertical scale covers one complete movement cycle. Lower and upper pairs of data points are relative to left-to-right (Phase 1) and right-to-left (Phase 2) movements, respectively. Bars encompass the 95 % confidence intervals
The grip force surge was different in the two phases. The analysis (three-way, 2 [Grip] × 3 [Orientation] × 2 [Phase]) demonstrated a strong interaction between movement orientation and phase (F(2,18) = 8.414, P = 0.006) reflecting the fact the greatest surge occurred either in Phase 1 or in Phase 2. Thus, as confirmed by the absence of statistical correlation, the amount of grip force increase was independent of the peak acceleration values within the corresponding transition. Instead the results suggest a role of the postures associated with movement orientation.
The control condition (bimanual finger grip) tested whether the results in the first three main sessions were influenced by the presence of the holding frame. For all orientations, whether the transducer was held directly with the fingertips or with the help of frame, movement kinematics was virtually identical. Figure 5 contrasts in five participants the corresponding grip force profiles. A significant difference emerged in the average force (inset). The lower force in the finger B-grip condition may be due to the fact that, without the frame, participants were less confident in their ability to distribute evenly the contribution of the individual fingers. In spite of this difference, however, all idiosyncratic force profile features in the three orientations were clearly identifiable, irrespective of grip modality. Indeed, even the delayed absolute force peak in the first transition for vertical displacements was due to the slightly different size of two relative maxima, both of which, however, were clearly present in both conditions.

B-grip with fingers (session 3, matched participants). a Transversal (X) orientation; b vertical (Y) orientation. c sagittal (Z) orientation. Each panel compares the normalized force profile across a movement cycle when the transducer is either mounted on the holding frame or held by the fingertips. Same format as in the upper panels of Figs. 2 and 3
The calibration session estimated the contribution to the total axial force by the dynamical response of the transducer mounted on the holding frame. Figure 6 shows with the same format of Figs. 2 and 3 the results when the frame is displaced passively. For ease of comparison, inertial forces were normalized after adding the average forces measured in the U-grip session. The kinematics of the movement was similar to the one observed in all U- and B-grip sessions. By contrast, the inertial forces acting on the transducer along the X axis were of course dependent on the orientation. For vertical and sagittal movements X, force components were fairly small and reflected the acceleration profiles only through the inevitable oscillations allowed by the handle grip (see Fig. 1c). In the case of transversal movements, the inertial force was instead not negligible and mimicked closely the corresponding large acceleration, with minor discrepancies due to the strain within the transducer. The main result was the significant difference of the inertial forces with respect those measured in both U- and B-grip sessions.

Dynamical response of the force transducer mounted on the holding frame (see Fig. 1c). a Transversal (X) orientation; b vertical (Y) orientation; c sagittal (Z) orientation. Lower panels displacement (thick line) and its second time derivative (thin line). Upper panels internal force along the X axis induced by a passive displacement of the grip tool (thick line) and 95 % confidence bands (thin lines). (Values >1: compression; values <1: extension)
This is emphasized in Fig. 7 where absolute rather than relative values are displayed. For the two phases separately, we have plotted in the same scale the relationship between acceleration/deceleration and force. Inertial forces were either positive (compression of the transducer for movements from left to right, see Fig. 1c) or negative (for movements from right to left). The slope of normal regression lines through the data points (thin lines) afford an estimate of the mass (68.8 gram-mass) responsible for the inertial load. In the upper part of the plots is shown the acceleration/deceleration–force relationship that obtains when one subtracts the inertial contribution from the measured force, which estimates the active force grip. Congruent with the experimental assignment, active forces were always compressive and far greater than inertial ones. More importantly, the plots show that the force modulations around the average (Figs. 2, 3) do not follow the acceleration/deceleration profile. In Phase 1 voluntary grip force clearly peaks in correspondence with the maximum deceleration. In Phase 2 the correspondence is less marked, but nevertheless present.

Relation between acceleration/deceleration of the holding frame and both inertial and grasp forces for transversal movement in the U-grip session. The results for movement Phase 1 (left to right) and Phase 2 (right to left) are shown in separate panels. Inertial forces measured in the calibration session (see Fig. 6) are almost proportional to the second time derivative of the displacement along the X-axis (the internal strain of the transducer may contribute to the small, systematic deviations). The slope of the normal regression lines through the data points (thin lines) estimates the mass of the holding frame. Grasp forces were estimated by subtracting the inertial contribution from the measured grip force (see Fig. 2a)
Continuous circular movements
Cycle duration did not differ significantly from the target value (frontal plane: m T = 1.22 s; horizontal plane: m T = 1.24 s; sagittal plane: m T = 1.23 s). Movement paths deviated instead from the required circular shape (frontal plane: A X = 36.21 cm, A Y = 45.64 cm; horizontal plane: A X = 36.17 cm, A Z = 31.20 cm; sagittal plane: A Y = 47.13, A Z = 28.70 cm), distortion being particularly large in the sagittal plane (Fig. 9). Shape distortions were likely to reflect the difficulty to coordinate accurately the movements of the two limbs. Possibly for the same reason, the paths were actually three dimensional. Deviations from the assigned plane were estimated by the variance of the movement samples along the axis orthogonal to the best-fitting plane, normalized to the mean of the variances along the other two axes defining this plane (Table 3). Because deviations from planarity were quite small and unsystematic, the component orthogonal to the assigned movement plane was not analyzed. For all orientations, the orthogonal components within the plane were close approximations to harmonic functions. Therefore, movement cycles could be isolated reliably by detecting the displacement velocity peaks, as we did for the one-dimensional sessions (aside from a π/2 phase shift, equivalent results could be obtained by using either plane components). Figure 8 summarizes with the same format as Figs. 2 and 3 the main results from this session (population averages, see Methods). The lower panels show the X component for the frontal (XY) and horizontal (XZ) planes, and the Y component for the sagittal (YZ) plane along with their second derivatives for a complete movement cycle. The upper panels show the corresponding normalized modulation of the grip and the 95 % associated confidence intervals. Both accelerations and decelerations in these conditions were lower than in point-to-point sessions, and so was the grip force (average reported inset). Figure 9 illustrates the phase relationship between force and acceleration/deceleration for all three movement planes. Although the relative amplitude of the grip force modulation was of the same order of magnitude, an important difference with respect to both U- and B-grip rectilinear conditions emerged in the timing relative to accelerations and decelerations. In both XY and XZ planes grip force peaked well after the maximum acceleration in the X direction (98 and 386 ms, respectively). In the YZ plane force peak preceded instead the maximum acceleration in the Y direction by 181 ms. Thus, unlike what we observed in the point-to-point conditions, where a stable correspondence between grip force modulation and variations of the inertial load was maintained across different orientation in space, the force/load relationship depended on the movement plane.

Circular movements (all participants). a Frontal (XY) plane; b horizontal (XZ) plane; c Sagittal (YZ) plane. Upper panels Grip force along the X axis (thick lines) normalized to the average over movement cycles. 95 % confidence bands (thin lines) take into account both within-participant variability across all complete movement cycles and between-participants variability. Lower panels in a and b X displacement component (thick lines) and its second time derivative (thin lines) for movements in frontal and horizontal planes, respectively. Lower panel in c Y displacement component. Time is normalized to the average movement period

Circular movements (all participants). Population results. a Frontal (XY) plane; b Horizontal (XZ) plane; c Sagittal (YZ) plane. Outer plots: trajectory averaged over all complete cycles and all participants (thick lines). For the frontal and horizontal planes is also shown a polar representation of the second time derivative of the X movement component (thin lines). By convention (see caption to Fig. 2) points outside the trajectory (red areas) correspond to positive derivatives and points inside the trajectory (blue areas) to negative derivatives. Acceleration/deceleration scale indicated by the double arrow. Inner polar plots: normalized grip force (thick lines) and reference (force = 1) circle (thin lines). Points outside (red areas) and inside (blue areas) the reference circle correspond to grip force greater (smaller) than average
Discussion
We investigated the grip force exerted by the fingers on an object that is either repeatedly and swiftly displaced between two endpoints (rectilinear sessions: 1, 2, and control), or transported along circular paths (two-dimensional session 3). For rectilinear sessions the main experimental factors were the orientation of the displacement with respect to the body (transversal, frontal, and sagittal) and the grip mode (unimanual vs. bimanual). In the two-dimensional session the grip was bimanual and we controlled the movement plane (frontal, horizontal, sagittal). In all sessions the grip force was set at a baseline level that exceeded by far the safety margin against accidental slippage.
Point-to-point rectilinear movements
Previous studies on active displacements of grasped objects (see Introduction) have shown that kinematics modulates the force exerted on the object, and have interpreted the modulation as a strategy to maintain a stable grasp against the variations of the total load (inertial and gravitational). Reflexes afford the only stabilizing strategy when load variation are unexpected (e.g., Johansson and Westling 1988), but they are way too slow to play an effective role when load changes are due to swift voluntary displacements. In this case stabilization is instead achieved by a feed-forward control that anticipates and compensates in advance load changes by taking advantage of the causal relationship between motor commands and resulting movements (Wolpert and Flanagan 2001). The evidence from our experiments does not fully support this view. We begin by considering the results of the U-grip session.
Unimanual grip
In the unimanual condition, Flanagan and Wing (1993) reported a strong temporal linkage between the upsurge of grip and load forces with correlation coefficients between times-to-peak exceeding 0.96. Moreover, grip force started to rise even before load forces. The linkage was equally strong for both vertical displacements, where gravitational and inertial loads summate algebraically, and horizontal displacements where they summate vectorially. This indicates that non-gravitational forces were dominating and, therefore, that grip force peaks were phase-locked to acceleration peaks. A close correspondence between the time course of load and grip forces was confirmed by a later study (Flanagan and Wing 1995) in which participants were instructed to maintain an elevated grip force level throughout the movement.
More recently, considering again the unimanual grip, Smith and Soetching (2005) reached a significantly different result. For linear movements in the horizontal plane, the grip force measured by the transducer is the vector sum of the manipulating (inertial) force required to move the object and the force required to hold the object steady (grasping force). By dissociating these two components, the authors reported that during the initial accelerating phase of the movement the grasping force increased slowly if at all, reaching its maximum value only midway during the movement, i.e., at peak velocity (zero acceleration). A temporal coincidence between the peak of grasping force and the peak of velocity for horizontal movements was also reported by Gao et al. (2005) and by Winges et al. (2007). A dissociation between manipulating and grasping components of the grip was adopted in a double-step experiment (Danion and Sarlegna 2007) to ascertain whether grasp force corrections precede or follow arm movement corrections. At least in the case when the movement had to be reprogrammed to extend further than initially planned, the results were more in keeping with those of Flanagan and Wing (1993, 1995) than with those of Smith and Soetching (2005) because grasping force changes anticipated movement changes by about 70 ms.
We reported yet another pattern of results. As shown in Fig. 2 for the U-grip condition, grip force peaked well after acceleration for all orientations and phases. Actually, in four cases out of 6, the peak value of the grip occurred simultaneously with the time of maximum deceleration (Fig. 4). After the peaks, grip force returned fairly slowly either to the steady value (transversal and frontal movements, panels A and B in Fig. 2) or to an intermediate value (sagittal movements, Panel C). Similar results were again observed in the control session when only the fingers were used to hold the object (Fig. 5), suggesting that the delayed grip response was not due to the presence of the holding frame. Also, the delayed grip response did not reflect the contribution of the inertial (manipulation) contribution to the total force. In fact, factoring this component out (Fig. 7) confirmed and extended the results of Figs. 2 and 5, by demonstrating an inverse relation between movement acceleration and grasping force extending over the entire duration of the movement. The discrepancy between our results and those of Smith and Soetching (2005) and Danion and Sarlegna (2007) could be credited to the lower average velocity in both studies with respect to our condition. Velocity differences, however, cannot explain why an even larger discrepancy exists with the study of Flanagan and Wing (1993) where, at least for “fast” trials, velocities were comparable.
Unimanual versus bimanual grip
Quantitative differences emerged by comparing the results of the U- and B-grip sessions (cf Figs. 2, 3). Accelerations and decelerations were generally lower in B-grip than in U-grip sessions. At the same time, force variability, both within- and between-participants, was higher with the B-grip than with the U-grip. In essence, unlike the situation in which the B-grip is used only for lifting an object (Burstedt et al. 1997) producing a swift movement by coordinating the actions of both hands was somewhat more difficult than by using just one hand. One qualitative difference between grip modes emerged for up–down movements (Fig. 3b) where, in addition to the main grip force peak that follows the maximum deceleration at the end of the upward swing, there was a consistent secondary peak in coincidence with the initial acceleration peak. Thus, unlike in the unimanual case, in the B-grip condition there is some evidence of an earlier anticipatory component of the grasping reaction. Over and above the differences summarized above, the temporal relationship between grip and inertial forces was, however, quite similar in the two sessions (Fig. 4). This is somewhat remarkable if one considers that, with the U-grip, transport and object holding could, in principle, be controlled independently. Instead, with the B-grip a reliable grasping must be achieved by a precise differential control in the two hands of the synergies (i.e., sets of muscles recruited by a single neural command signal) responsible for the transport. It has been speculated (Arbib et al. 1985; Iberall and MacKenzie 1990) that the control of multifingered grasp is simplified by lumping the real digits in just two virtual digits acting in simpler opposition space. By analogy, it could be suggested that a precise grasp force control is achieved by lumping the three-element biomechanical chain [left arm]-[manipulandum]-[right arm] into a single virtual endpoint effector. At the same time, the increased difficulty of the bimanual task with respect to the unimanual task may partly due to the cross-coupling demonstrated at the level of the distal musculature when both hands are engaged in independent but coordinated actions (Serrien and Wiesendanger 2001a, b; Bracewell et al. 2003; Stucchi and Viviani 1993).
Flanagan and Tresilian (1994) reported more significant differences between grip modes than we did. With the precision unimanual grip (cf Fig. 3 in [Flanagan and Tresilian 1994]), force peaked in coincidence with the point of maximum acceleration for upward movements and with the point of maximum deceleration for downward movements.Footnote 2 Instead, with the bimanual grip (cf Fig. 4 in [Flanagan and Tresilian 1994]), the force profile was much shallower, the peak occurring in between acceleration and deceleration maxima, both for upward and downward movements. Note that in their study only the index fingers were used to hold the object. More importantly, the other fingers were interleaved and the tips of the thumbs were joined together. This methodological difference, however, seems insufficient to account for the discrepancy between their results and ours. Indeed, by rigidifying the biomechanical chain formed by the arms and the hands, the bimanual condition tested by Flanagan and Tresilian (1994) was actually somewhat similar to our unimanual condition in that it favored again a dissociation between holding and transport action.
Circular motion with bimanual grip
Marked modulations of grip force were present also in circular movements (Figs. 8, 9). However, peak values of the acceleration and of the associated inertial load along the X, Y, and Z axes were smaller than in the point-to-point condition and so was the average grip force. The amount of force modulation was comparable in the three planes, with only one clearly identifiable maximum and minimum. The most striking finding is the systematic modulation of the grip force also for movements in the sagittal plane (Fig. 8c) where, inasmuch as the movement is planar, the inertial load along the X-axis is zero. In the horizontal and vertical planes where systematic X-axis load components were present, maxima and minima of the grip force had no unique temporal relation with the inertial loads (accelerations), either along the X-axis or along the other axis defining the plane. Moreover, force modulation during circular motion cannot be predicted from the results of the point-to-point bimanual task. For instance, in the horizontal plane (Fig. 8b) force reaches a maximum well after the X component has reached the maximum deceleration when going toward the left side of the body. By contrast, in the point-to-point case (Fig. 3a) force is minimum even before movement has started going toward the left.
Our results (Fig. 9) agree in part with those reported recently in a detailed study on grip forces during circular motion (Figure 4 in Slota et al. 2011). To compare the findings of the two studies, a terminological difference must be noted. The grip (internal) force is defined by Slota et al. (2011) as the minimum between the force exerted by the thumb and the force exerted by a virtual finger that embodies the action of the other fingers holding the manipulandum; the (signed) excess above this minimum is the manipulation force producing the displacement. Therefore, the force in that study is actually what we call here grasp force and does not coincide with the grip force shown in Fig. 9. The difference, however, is not crucial. Because the mass of the manipulandum was modest, grasp force was far larger than manipulation force (Fig. 7) and, to a first approximation, grasp and grip forces can be confused. The first and most significant similarity between our findings and those of Slota et al. (2011) is the presence of a large grip/grasp modulation also when the circular motion is executed in a plane orthogonal to the normal axis of the sensor [i.e., the sagittal ZY plane in this study (Fig. 9c) and the frontal XY plane in Slota et al. (2011)]. As noted above, such a modulation cannot be construed as a pre-planned action aiming at countering large changes in dynamic load. Qualitative similarities can be observed also for movements in the frontal plane (Fig. 9a). Indeed, in both studies grip reached a maximum in the middle of lower left quadrant and was minimum in the middle of the upper right quadrant. A discrepancy exists concerning the force distribution in the horizontal plane (Fig. 9b) where we detected only one force maximum in the segment of the trajectory nearest to the body instead of two maxima placed symmetrically along the 25°–225° diameter. The most likely reason for the discrepancy is the grip mode (bimanual in this study, unimanual in Slota et al. (2011). However, the base level of force and the mass of the manipulandum, which were both higher in Slota et al. (2011) than in this study could also be significant factors.
Do we find evidence of pre-planned grip control?
Participants were aware that the risk of dropping the holding frame was minimal. Moreover, because of the high preloading of the grip, any further increase in the active (grasping) component in response to movement could hardly be construed as a compensatory strategy. Of course, any variation of the inertial load, particularly the brisk load upsurges occurring in point-to-point movements, may in principle be anticipated by feed-forward mechanisms on the basis of the motor commands responsible for the movement (Davidson and Wolpert 2005; Flanagan and Wing 1997; Wolpert and Flanagan 2001; Flanagan and Tresilian 1994; Danion and Sarlegna 2007; Witney and Wolpert 2007). However, if grip force modulations were proactive responses to anticipated load changes, triggered automatically even when their strategic value is questionable as in our conditions, one would expect a different pattern of results. Specifically, in fast point-to-point movements (sessions 1 and 2) grip force increases should anticipate, or at least be simultaneous with load increases. As shown in Fig. 4, they tend instead to occur near the breaking phase, at the end of the displacement. Moreover, contrary to what we observed, grip responses should be stronger for vertical movements when, at least in real-life situations, the risk of dropping the object is higher.
The results of the circular motion condition (session 3) were also inconsistent with the hypothesis that grasp modulations are strategically pre-planned responses to kinematic events. In the horizontal plane trajectories did not depart dramatically from the prescribed circular one (Fig. 9), the modulus of the velocity was fairly constant, and so was the modulus of the inertial load. Thus, the pre-planning hypothesis predicts no anticipatory modulation of the grip. Instead, the contribution of gravity to the total load in the vertical and sagittal planes introduced an asymmetry that could be anticipated and countered by an increase in the grip during the upswing phase of the movement. In conclusion, in the horizontal plane the component of the grip measured along the X (transversal) axis should vary as the cosine of the angle of the position vector with respect to this axis. In the vertical plane the effect of gravity on a counterclockwise rotation should reveal itself as an extra grip increase with respect to the horizontal plane in the right portion of the trajectory (upswing). In both cases peaks and troughs should occur at the right- and left-most ends of the trajectory. Finally, no modulation should be measured for movements in the sagittal plane (disregarding the small contribution due to deviations from planarity). The polar plots of Fig. 9 show clearly that the results do not confirm any of these predictions.
Can we do without predictive control?
In a recent review on the neural mechanisms subserving prehension Grafton (2010) acknowledged that the notion of model-based feed-forward predictions may be no more than a metaphor for what the nervous system actually does. More specifically, Winges et al. (2007) and Slota et al. (2011) questioned the notion of model-based predictions by suggesting that the modulation of grasp force can be explained more simply by taking into account the elastic forces arising from muscle co-contraction. Along similar lines we ask whether a parsimonious account of the experimental findings may be derived from the assumption that the forces generated in both point-to-point and circular movements can be described as the response of visco-elastic systems to appropriately tailored driving inputs. In particular we explore the hypothesis that grip force modulations originate from the low-pass filter nature of process translating motor commands into forces having as consequence that opposite commands that are adjacent in time produce overlapping forces (co-contractions).
The hypothesis must be qualified. Let us consider first the B-grip transversal point-to-point condition. Holding the manipulandum still at one movement endpoint while maintaining the required high level of grip force involves the co-activation of the flexors in the two arms. The brisk transition to the opposite endpoint requires reducing the force in one arm while increasing it in the opposite arm. At the end of the movement the position is stabilized again by restoring a balance between opposing forces. Thus, the overlap responsible for grip increase would occur between the decrease in the force generated by the flexors in one arm and the subsequent increase in the force generated by the flexors in the other arm. B-grip circular movements are essentially produced by keeping a stable 90° phase relationship between two orthogonal harmonic components, each component being in its turn the result of modulating opposing forces around a baseline level. No net grip force change would occur if the modulation were perfectly synchronous in the two arms. We assume that the observed changes reflect a phase difference between the force decrease in one arm and the force increase in the other arm. As in the rectilinear case, this phase difference would result from the low-pass nature of the force generators. Finally, the U-grip condition is different from both B-grip conditions in that different muscles are involved in maintaining the required high grip baseline and in stabilizing the limb at one end-point. There is evidence, however, that the stiffening of the arm and that of the fingers are actually correlated (Friedman and Flash 2007; Hu et al. 2012). One can then assume that the upsurge of arm agonist activity and the concomitant release of the antagonist activity marking the brisk onset of the movement is accompanied by a similar alteration of the force balance at the finger level. If so, the grip force increase at movement onset may again be credited to a temporal overlap between force levels similar to the one hypothesized for B-grip tasks.
Additional assumptions are required to account for the fact that in all three main sessions grip force increases transiently also along axes not involved in the movement. Specifically, in the vertical and sagittal point-to-point B-grip condition going from one endpoint to the other requires the simultaneous activation in both arms of agonist synergies generating forces orthogonal to the X axis along which grip forces are measured. At the same time, synergies generating forces along the X axis must remain active throughout the movement to secure the required grasp level. We assume that the transient grip force increase along this axis (Fig. 3b, c) is the indirect reflection of the transient stiffness increase in the synergies responsible for the movement. The assumption is justified by the results of several studies (Darainy et al. 2004; Gomi and Osu 1998; Perreault et al. 2002) showing that during the maintenance of posture the CNS has a limited ability to control differentially the axes of the stiffness ellipsoid. Thus, any transient increase along one axis of the ellipsoid is likely to affect also the other axes. The same assumption can also account for the grip force transients in vertical and sagittal, point-to-point B-grip conditions (Fig. 2b, c) and in circular movements executed in the sagittal plane (Fig. 8c).
For the sake of concreteness, we tested whether a satisfactory account of the results in both rectilinear and circular sessions can be derived from just three assumptions: (1) the outputs from the motoneuronal pools to each agonist/antagonist pair are programmed to switch independently in a pulse-like fashion between two steady values; (2) some low-pass filtering of the pulses intervenes as the commands are translated into forces; (3) displacements result from forces being applied to a mass-spring-viscosity mechanical system. In the Appendix we illustrate with representative examples how these assumptions do actually allow one to predict fairly accurately the time course of kinematic variables and grip force both for rectilinear and circular movements. Similar results can be obtained for the population data in the other tested conditions and also for individual performances.
It bears stressing that our simulation scheme is conceptual and cannot be construed as a plausible description of the biological system. Furthermore, it does not even begin to address the crucial issue of how the inputs driving the system are actually controlled. However, we argue that the simulation highlights a methodological issue. Because of the intrinsic properties of visco-elastic systems, complex behaviors emerge even from fairly unstructured driving inputs. By identifying the least structured input that accounts for a motor behavior, one sets an upper limit to the complexity of the hypothesis that can be put forward to explain that behavior. In our case, the simulation suggests that the temporal relation between kinematic variables and grip force can be predicted without the need to postulate that the grasp component of the grip force is planned along with the commands responsible for the movements, according to some anticipatory control scheme. The simulation demonstrates the compatibility of the model with the results when its parameters are given values that are not unrealistic. This of course does not exclude that a different mechanism may turn out to be equally compatible. The satisfactory adequacy of the predictions to the results only justifies a positive answer to the question “Can we do without predictive control?”. In essence we wanted to press a methodological point akin to Occam’s razor, namely that if a concept is not necessary to account for a given body of observations, a principle of parsimony suggests not to include it into an explanatory scheme.
Two more specific points are worth mentioning. The first point concerns the temporal relationship between grip force and transport kinematics in rectilinear movements. It is safe to assume that the average strength of the grasping component (the so-called stato-dynamic fraction, Zatsiorsky et al. (2005)) is set independently, either in response to the experimental assignment—as in Flanagan and Wing (1995) and in the present study—or to secure a safety margin against possible slippage. The question then is how to interpret the observed modulation of the grasping component around the average. The alignment of the force peak with the maximum acceleration has been cited as critical evidence in support of the hypothesis that grasping is functionally linked to the movement commands via an anticipatory mechanism (see Introduction). The simulation (Fig. 12) does not predict such alignment. Instead, in keeping with our results (Figs. 2, 3, 5), the predicted transient increase in the grip force near movement onset is actually closer in time to the point of maximum deceleration, and results from the same commands responsible for the concurrent variations of the inertial load.
The second point concerns circular movements. As discussed in the previous section, the pattern of results for these movements is inconsistent with the alleged stabilizing role of grip strengthening. It is instead well predicted by the hypothesis that along both axes defining the movement plane the driving inputs overlap partially so that the pulling action in one direction begins before the preceding pulling action in the opposite direction has ended. Thus, the simulations are compatible with the idea that one and the same mechanism is responsible in both continuous and point-to-point movements for systematic modulations of the grip force.
A recurring theme in the study of manual prehension has been the attempt to provide a unified framework for describing the processes that precede the lifting phase and the processes that intervene when, by moving around the seized object, one has to deal also with the associated dynamic load. Perhaps a more differentiated approach to these two phases might be in order. It seems indisputable that models and expectations about object properties have a paramount importance for calibrating grasp forces before lift-off. Indeed, clinical studies (Forssberg et al. 1999; Gordon and Duff 1999; Duque et al. 2003) have show that cortical and subcortical lesions do affect the grip-load force coordination during the initial phase of the grasp. Moreover, it has also been suggested that lesion-induced deficits can affect selectively how this coordination is planned, while sparing motor execution (Raghavan et al. 2006). We have argued that the case for a role of models and expectations during the subsequent movement phase is not equally strong. Of course, one cannot rule out that evidence from further studies may call for a more articulated and physiologically plausible account of the coordination between grip and transport after lift-off.
Notes
Note: In the relevant literature there are occasional terminological inconsistencies. Throughout this article we adopt the following terminology. Load force: total force acting on the manipulandum, i.e. the vector sum of the gravitational force and of the inertial force required to move. Grip force: total amount of force measured by the transducer along one axis. Following the convention adopted in robotics (Yoshikawa and Nagai 1991), grip force can be partitioned into two components: the inertial force vector aligned with the direction of the movement and the grasping force vector with which the manipulandum is held. The grasping force vector is aligned with the transducer axis along which stress is measured.
The sign convention in that figure is different from the one adopted here.
References
Arbib MA, Iberall T, Lyons D (1985) Coordinated control programs for movements of the hand. Exp Brain Res Suppl 10:111–129
Bracewell RM, Wing AM, Soper HM, Clark KG (2003) Predictive and reactive co-ordination of grip and load forces in bimanual lifting in man. Eur J Neurosci 18:2396–2402
Burstedt MKO, Edin BB, Johansson RS (1997) Coordination of fingertip forces during human manipulation can emerge from independent neural networks controlling each engaged digit. Exp Brain Res 117:67–79
Cole KJ, Abbs JH (1988) Grip force adjustments evoked by load force perturbations of a grasped object. J Neurophysiol 60:1513–1522
Danion F, Sarlegna FR (2007) Can the human brain predict the consequences of arm movement corrections when transporting an object? Hints from grip force measurements. J Neurosci 27:12839–12843
Darainy M, Malfait N, Gribble PL, Towhidkhah F, Ostry DJ (2004) Learning to control arm stiffness under static condition. J Neurophysiol 92:3344–3350
Davidson PR, Wolpert DM (2005) Widespread access to predictive models in the motor system: a short review. J Neural Eng 2:S313–S319
Duque J, Thonnard JL, Vandermeeren Y, Sebire G, Cosnard G, Olivier E (2003) Correlation between impaired dexterity and corticospinal tract dysgenesis in congenital hemiplegia. Brain 126:732–747
Feldman AG, Latash ML (2005) Testing hypotheses and the advancement of science: recent attempts to falsify the equilibrium point hypothesis. Exp Brain Res 161:91–103
Feldman AG, Ostry DJ, Levin MF, Gribble PL, Mitnitski AB (1998) Recent tests of the equilibrium-point hypothesis (λ model). Mot Control 2:189–205
Flanagan JR, Tresilian JR (1994) Grip-load force coupling: a general control strategy for transporting objects. J Exp Psychol Hum Percept Perform 20:944–957
Flanagan JR, Wing AM (1993) Modulation of grip force with load force during point-to-point arm movements. Exp Brain Res 95:131–143
Flanagan JR, Wing AM (1995) The stability of precision grip forces during cyclic arm movements with a hand-held’975 load. Exp Brain Res 105:455–464
Flanagan JR, Wing AM (1997) The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. J Neurosci 17:1519–1528
Flanagan JR, Tresilian JR, Wing AM (1993) Coupling of grip force and load during arm movements with grasped objects. Neurosci Lett 152:53–56
Flanagan JR, Tresilian JR, Wing AM (1995) Grip force adjustments during rapid hand movements suggest that detailed movement kinematics are predicted. Behav Brain Sci 18:753–754
Forssberg H, Eliasson AC, Redon-Zouitenn C, Nercuri E, Dubowitz L (1999) Impaired grip-lift synergy in children with unilateral brain lesions. Brain 122:1157–1168
Friedman J, Flash T (2007) Task-dependent selection of grasp kinematics and stiffness in human object manipulation. Cortex 43:444–460
Gao F, Latash ML, Zatsiorky VM (2005) Internal forces during object manipulation. Exp Brain Res 165:69–83
Gomi H, Osu R (1998) Task-dependent viscoelasticity of human multijoint arm and its spatial characteristics for interaction with environments. J Neurosci 18:8965–8978
Gordon AM, Duff SV (1999) Fingertip forces during object manipulation in children with hemiplegic cerebral palsy. I: anticipatory scaling. Dev Med Chil Neurol 41:166–175
Gorniak SL, Zatsiorsky VM, Latash LM (2010) Manipulation of a fragile object. Exp Brain Res 202:413–430
Grafton ST (2010) The cognitive neuroscience of prehension: recent developments. Exp Brain Res 204:475–491
Haggard P (1992) Multi-sensory control of motor control and learning. In: Summers JJ (ed) Approaches to the study of motor control and learning. Elsevier, New York, pp 195–231
Haggard P, Wing AM (1991) Responses to perturbation in human prehension. Neurosci Lett 122:103–108
Hu X, Murray WM, Perreult EJ (2012) Biomechanical constraints on the feedforward regulation of endpoint stiffness. J Neurophysiol 108:2083–2091
Iberall T, MacKenzie CL (1990) Opposition space and human prehension. In: Venkataraman ST, Iberall T (eds) Dextrous robot hands. Springer, New York, pp 32–54
Jakobson LS, Goodale MA (1991) Factors affecting higher-order movement planning. A kinematic analysis of human prehension. Exp Brain Res 86:199–208
Jeannerod M (1981) Intersegmental coordination during reaching at natural visual objects. In: Long J, Baddeley A (eds) Attention and performance, vol 9. Erlbaum, Hillsdale, pp 153–168
Jeannerod M (1984) The timing of natural prehension movements. J Motor Behav 16:235–254
Jeannerod M (1986) The formation of finger grip during prehension. A cortically mediated visuomotor pattern. Behav Brain Res 19:99–116
Jeannerod M, Arbib MA, Rizzolatti G, Sakata H (1995) Grasping objects: the cortical mechanisms of visuomotor transformation. Trends Neurosci 18:314–320
Johansson RS (1991) How is grasping modified by Somatosensory input? In: Humphrey DG, Freund H-J (eds) Motor control: concepts and issues, Dahlem Konferenzen. Wiley, Chichester, pp 331–335
Johansson RS (1998) Sensory input and control of grip. In: Bock GR, Goode JA (eds) Novartis foundation symposium 218. Sensory guidance of movement. Wiley, Chicester, pp 45–63
Johansson RS, Westling G (1984) Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp Brain Res 56:550–564
Johansson RS, Westling G (1987) Signals in tactile afferents from the fingers eliciting adaptive motor responses during precision grip. Exp Brain Res 66:141–154
Johansson RS, Westling C (1988) Programmed and triggered actions to rapid load changes during precision grip. Exp Brain Res 71:72–86
Johansson RS, Riso R, Häger C, Bäckström L (1992a) Somatosensory control of precision grip during unpredictable pulling loads. I. Changes in load force amplitude. Exp Brain Res 89:181–191
Johansson RS, Häger C, Riso R (1992b) Somatosensory control of precision grip during unpredictable pulling loads. II. Changes in load force rate. Exp Brain Res 89:192–203
Johansson RS, Häger C, Bäckström L (1992c) Somatosensory control of precision grip during unpredictable pulling loads. III. Impairments during digital anesthesia. Exp Brain Res 89:204–213
Kinoshita H, Ikuta K, Kawai S, Udo M (1993) Effects of lifting speed and height on the regulation of forces during lifting tasks using a precision grip. J Hum Mov Stud 25:151–175
Kinoshita H, Ikuta K, Kawai S, Teraoka T (1995) Individual finger forces acting on a grasped object during shaking actions. Ergonomics 39:243–256
Macefield VG, Häger-Ross C, Johansson RS (1996) Control of grip force during restraint of an object held between finger and thumb: responses of cutaneous afferents from the digits. Exp Brain Res 108:155–171
Martin JB, Chaffin DB (1972) Biomechanical computerized simulation of human strength in sagittal-plane activities. AIIE Trans 4:19–28
Ogden C, Fryar C, Carroll M, Flegal K (2004) Mean body weight, height, and body mass index, United States 1960–2002. Adv Data 347:1–17
Paulignan Y, MacKenzie C, Marteniuk R, Jeannerod M (1990) The coupling of arm and finger movements during prehension. Exp Brain Res 79:431–435
Perreault EJ, Kirsch RF, Crago PE (2002) Voluntary control of static endpoint stiffness during force regulation tasks. J Neurophysiol 87:2808–2816
Pilon J-F, De Serres SJ, Feldman AG (2007) Threshold position control of arm movement with anticipatory increase in grip force. Exp Brain Res 181:49–67
Raghavan P, Krakauer JW, Gordon AM (2006) Impaired anticipatory control of fingertip forces in patients with a pure motor or sensorimotor lacunal syndrome. Brain 129:1415–1425
Serrien DJ, Wiesendanger M (2001a) Dissociation of grp/load force coupling during a bimanual manipulative assignment. Exp Brain Res 136:417–420
Serrien DJ, Wiesendanger M (2001b) Bimanual organization of manipulative force: evidence from erroneous feedforward programming of precision grip. Eur J Neurosci 13:153–160
Slota GP, Latash ML, Zatsiorsky VM (2011) Grip forces during object manipulation: experiment, mathematical model, and validation. Exp Brain Res 213:125–139
Smith MA, Soetching JF (2005) Modulation of grasping forces during object transport. J Neurophysiol 93:137–145
Stucchi N, Viviani P (1993) Cerebral dominance and asynchrony between bimanual two-dimensional movements. J Exp Psychol HPP 19:1200–1220
von Hofsten C, Rönnqvist L (1988) Preparation for grasping an object: a developmental study. J Exp Psychol Hum Percept Perform 14:610–621
Wallace SA, Weeks DL (1989) Temporal constraints in the control of prehensile movement. J Mot Behav 20:81–105
Winges SA, Soechting JF, Flanders M (2007) Multidigit control of contact forces during transport of handheld objects. J Neurophysiol 98:851–860
Witney AG, Wolpert DM (2007) The effects of externally generated loading on predictive grip force modulation. Nerosci Lett 414:10–15
Wolpert DM, Flanagan JR (2001) Motor prediction. Curr Biol 11:R729–R732
Yang JF, Scholz JP, Latash ML (2007) The role of kinematic redundancy in adaptation of reaching. Exp Brain Res 176:54–69
Yoshikawa T, Nagai K (1991) Manipulating and grasping forces in manipulation by multifingered robot hands. IEEE Trans Robot Autom 7:67–77
Zatsiorky VM, Latash ML (2008) Multifinger prehension: an overview. J Mot Behav 40:446–476
Zatsiorsky VM, Gao F, Latash ML (2005) Motor control goes beyond physics: differential effects of gravity and inertia on finger forces during manipulation of hand-held objects. Exp Brain Res 162:300–308
Acknowledgments
We thank Dr. Mauro Carrozzo for help with the experiments and Prof. Andrea d’Avella for providing the force transducer. The work was supported by the Italian Ministry of University and Research (PRIN Grant 2010MEFNF7_002) and Italian Space Agency (COREA Grant).
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
We describe a simple mechanical model for simulating the experimental results. The central assumption is that the end-point position P is determined by the opposing forces generated by two mass-spring systems, where the springs have constant stiffness K and controllable resting lengths L 0 (Fig. 10a). Displacements of the end-point position P are generated by modulating appropriately the resting lengths. The scheme described here applies directly to the case where movement and grip forces are aligned. When they are not aligned (e.g., for vertical point-to-point movements) we assume that two such schemes are at work, one responsible for the displacement, the other for holding the manipulandum. Thus, as argued in the Discussion, the grip modulations measured in the holding scheme—within which the frame is not moving—are the indirect reflection of the modulations occurring in the moving scheme. A similar assumption is made in the case of circular motions where the role of the two schemes switches every half-period of the motion.

Modeling the performance. a A mass under the action of two opposite elastic forces F = K(x − L 0) can be moved from one equilibrium position P′ to a different equilibrium position P″ by controlling the resting length L 0 of one or both elastic elements, while keeping constant their stiffness. b A simple mechanical system. The displacement x(t) of a mass M is driven by controlling independently the effective lengths X 1(t) = L − L 01(t) and X 2(t) = L − L 02(t) of each spring. Because of the way the springs are attached to the mass, the total compressing force acting on the mass is G f(t) = K 1 X 1(t) + K 2 X 2(t) + x(t)(K 2 − K 1)
The system is depicted in Fig. 10b. A mass M moves under the joint pull of the springs with stiffness K 1 and K 2. The outer ends of the springs are attached at a fixed distance L from the 0 reference and time-varying resting length L 01(t) and L 02(t). Motion is damped by a linear viscous damper with coefficient C. The input to the system are the effective lengths of the springs, defined as X 1(t) = L − L 01(t) and X 2(t) = L − L 02(t). The equation of the motion is:
where x(t) is the signed distance of the mass for the 0 reference. Because of the way the springs are attached, the grip force acting on the mass during the motion is: G f(t) = K 1 X 1(t) + K 2 X 2(t) + x(t)·(K 2 − K 1).
To simulate the results for point-to-point linear movements, X 1(t) and X 2(t) were modeled by two sequences of low-pass-filtered pulses with the same period (T = 2.4 s), amplitude and baseline, each modulating in opposite directions the force exerted by the springs. The leading and trailing edges of the pulses were modeled by generalized sigmoid functions:
Figure 11 shows a normalized representation of the individual pulses X 1(t) and X 2(t) (baseline not shown). We assumed K 1 = K 2. Thus, the grip force is proportional to the sum X 1(t) + X 2(t), which is also shown in the upper part of the figure. In this scheme grip modulations emerge from the overlap between the leading edge of a pulse and the trailing edge of the previous pulse pulling in the opposite direction. Pulse amplitude and baseline were set to reproduce the average grip force and the prescribed displacement amplitude (40 cm). The grip force time course was simulated by choosing appropriately the slope difference for pulses in opposite directions. The kinematics of the mass was obtained by solving the equation of the motion with the best-fitting parameters M, C and K (see below). Figure 12 compares the simulation with the actual data in the case of transversal U-grip motions (see Fig. 2) where the peaks of the grip force (upper panel) and the acceleration profiles (lower panel) in the two phases of the movement were significantly different.

Lower panel: schematic representation of the driving input to the mechanical system depicted in Fig. 10. The modulations of the effective lengths X 1(t) = L − L 01(t) and X 2(t) = L − L 02(t) (colored lines) are modeled by a sequence of low-pass-filtered rectangular pulses. The net force acting on the mass is F(t) = K 1 X 1(t) − K 2 X 2(t). Upper panel the sum K 1 X 1(t) + K 2 X 2(t) (black line). When K 1 = K 2, this sum is equal to the grip force. The scheme shows how grip forces arise because of the overlap between the trailing edge of an impulse and the leading edge of the following impulse. The example illustrates a situation where the overlap for left-to-right movements is larger than the one in the opposite direction giving rise to a larger grip pulse (see Fig. 2). Scales for X 1(t) and X 2(t) and for the grip force are in arbitrary units

Point-to-point movements. U-grip with holding frame, movements in the transversal (X) direction. Comparison of real (black dots) and simulated (red lines) performance. The data points are an undersampled version of the experimental results already shown in Fig. 2a. a Grip force. The indicated average is relative to the simulation. b Displacement and acceleration
The model behavior was also compared with the results for the two main components of circular movements. We assumed that movement trajectories are generated by a combination of two mechanical systems as the one in Fig. 10b acting along orthogonal axes. For one system the effective lengths vary as X 1(t) = A x sin(ωt) + B x and X 2(t) = A x sin(ωt + θ x ) + B x . For the orthogonal system they vary as Y 1(t) = A y cos(ωt) + B y and Y 2(t) = A y cos(ωt + θ y ) + B y (ω = 2π/T). Thus, for the X-axis, the driving force K 1 X 1 − K 2 X 2 is an harmonic function F sin(ωt + ψ) where
As in the case of rectilinear movements, grip forces emerge because the phase difference θ produces a partial overlap between the components K 1 X 1 and K 2 K 2 of the driving force. The experimental results were simulated by making again for each axis separately the simplifying assumption K 1 = K 2 = K, so that the grip force is GF(t) = K(X 1 + X 2) = Gsin(ωt + φ) where
Because trajectories were not perfectly circular, the amplitude parameter A was estimated independently for each axis from the data. Then, we determined the model parameters affording the best fit to both the actual grip force profile and to the kinematics of the movement. Figure 13 compares experimental and simulated data in the case of the X-axis for movements in the frontal (X–Y) plane. The approximation was equally good for the Y axis in the frontal plane and for both X- and Z-axis for movements in the horizontal plane. Our scheme assumes that movements were strictly planar. Therefore, it cannot account for grip modulations measured in the sagittal plane (Figs. 8c, 9c), which may in part reflect the significant deviations of the movement from planarity.

Circular movements. B-grip with holding frame, Transversal (X) component of the movement in the frontal (XY) plane. Comparison of real (black dots) and simulated (red lines) performance. The data points are an undersampled version of the experimental results already shown in Fig. 9c. a Grip force. The indicated average is relative to the simulation. b Displacement and acceleration
The driving force is proportional to the stiffness K. Thus, in fitting the simulation to the data only the ratios C/M and K/M can be specified independently. However, we verified that the stiffness values required to mimic grip forces in linear and circular movements are at least realistic. From the average body mass for individuals in the age range of the participants (M b = 78.24 kg, Ogden et al. 2004), and the average ratio between arm and body mass (M a /M b = 0.062, Martin and Chaffin 1972), one obtains: M a = 4.85 kg. For linear U-grip movements, the fitting shown in Fig. 12 required a ratio K/M = 138.9, yielding an estimated stiffness K = 6736 N/m. The required ratio C/M = 9.69 yielded the estimate C = 470 N s/m. For circular movements (Fig. 13) the fitting required K/M = 55.56 and C/M = 8.33. Because both arms were involved, we assumed that the moving mass was twice as large as in single arm movements. This yielded an estimated equivalent stiffness K = 5384 N/m and an estimated equivalent viscosity C = 808 N s/m. Though approximate, stiffness estimates are well in keeping with those reported by Hu et al. (2012) for maximally stiffened arms in the horizontal plane.
Rights and permissions
About this article

Cite this article
Viviani, P., Lacquaniti, F. Grip forces during fast point-to-point and continuous hand movements. Exp Brain Res 233, 3201–3220 (2015). https://doi.org/10.1007/s00221-015-4388-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-015-4388-4