
Abstract
In this paper, curved fronts are constructed for spatially periodic bistable reaction-diffusion equations under the a priori assumption that there exist pulsating fronts in every direction. Some sufficient and some necessary conditions of the existence of curved fronts are given. Furthermore, the curved front is proved to be unique and stable. Finally, a curved front with varying interfaces is also constructed. Despite the effect of the spatial heterogeneity, the result shows the existence of curved fronts for spatially periodic bistable reaction-diffusion equations which is known for the homogeneous case.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we consider spatially periodic reaction-diffusion equations of the type
where \(u_t=\frac{\partial u}{\partial t}\) and \(\Delta =\partial _{xx}+\partial _{yy}\) denotes the Laplace operator with respect to the space variables \((x,y)\in \mathbb {R}^2\). The reaction term f(x, y, u) is assumed to be periodic in (x, y) and bistable in u. More precisely, we assume throughout this paper that
-
(F1)
f(x, y, u) is continuous, of class \(C^{\alpha }\) in (x, y) uniformly in \(u\in [0,1]\) with \(\alpha \in (0,1)\), of class \(C^2\) in u uniformly in \((x,y)\in \mathbb {R}^2\) with \(f_{u}(x,y,u)\) and \(f_{uu}(x,y,u)\) being Lipschitz continuous in \(u\in \mathbb {R}\);
-
(F2)
f(x, y, u) is L-periodic with respect to (x, y) where \(L=(L_1,L_2)\in \mathbb {R}^2\), that is, \(f(x+k_1L_1,y+k_2L_2,u)=f(x,y,u)\) for any \(k_1\), \(k_2\in \mathbb {Z}\);
-
(F3)
for every \((x,y)\in \mathbb {R}^2\), 0 and 1 are stable zeroes of \(f(x,y,\cdot )\), that is,
$$\begin{aligned} f(x,y,0)=f(x,y,1)=0, \end{aligned}$$and there exist \(\lambda >0\) and \(\sigma \in (0,1/2)\) such that
$$\begin{aligned}&-f_u(x,y,u)\ge \lambda \hbox { for all}\\&\quad (x,y,u)\in \mathbb {R}^2\times [0,\sigma ]\hbox { and }(x,y,u)\in \mathbb {R}^2\times [1-\sigma ,1]. \end{aligned}$$
A typical example of f(x, y, u) is the cubic nonlinearity
where \(\theta _{x,y}\in (0,1)\) is a L-periodic function. The Eq. (1.1) is a special generalization of the famous Allen–Cahn equation [1]. For mathematical convenience, we extend f(x, y, u) out of the interval \(u\in [0,1]\) such that
Then, f(x, y, u) is globally Lipschitz continuous in \(u\in \mathbb {R}\).
Before proceeding further, we first recall some well-known results in the homogeneous case, that is,
where f is of bistable type, that is, \(f(0)=f(1)=f(\theta )\), \(f<0\) on \((0,\theta )\) and \(f>0\) on \((\theta ,1)\), for some \(\theta \in (0,1)\). For one-dimensional space, it follows from celebrated results due to Fife and McLeod [13] that (1.3) admits a unique (up to shifts) traveling front \(\phi (x-c_f t)\) satisfying
Moreover, the speed \(c_f\) has the sign of \(\int _0^1 f(u)du\) and the front is globally and exponentially stable. A trivial extension of the traveling front to higher dimensional spaces is the planar front \(\phi (x\cdot e- c_f t)\) where \(e\in \mathbb {S}^{N-1}\) denotes the propagation direction. Notice that every level set of a planar front is a plane. In addition to planar fronts, more types of fronts are also known to exist in high dimensional spaces, such as V-shaped fronts, conical shaped fronts and pyramidal fronts, see Hamel et. al. [19], Ninomiya and Taniguchi [21] and Taniguchi [24, 25]. All these fronts are transition fronts connecting 0 and 1 defined by Berestycki and Hamel [3]. The notions of transition fronts generalize the standard notions of traveling fronts. Roughly speaking, transition fronts connecting 0 and 1 are those entire solutions u(t, x) for which there is a set \(\Gamma _t\) (which is called interface and can be picked as a level set of entire solutions) splitting the space into two parts \(\Omega _t^{\pm }\) satisfying
For more conditions on \(\Gamma _t\) and \(\Omega _t^{\pm }\), we refer to [3]. For above fronts, their interfaces between 0 and 1 can be given by their level sets and different shapes of interfaces actually show some structures of the solutions. One can roughly imagine a global appearance of such solutions in the framework of transition fronts by noticing that the solutions are approaching to 1 and 0 on one side and the other of the interfaces, respectively.
As far as a spatially periodic bistable reaction-diffusion equation considered, the situation is more complicated than the homogenous case. Because of the effect of hetereogeneities, there may even not exist transition fronts connecting states 0 and 1, see Zlatoš [33]. However, what we are concerned with in this paper is the existence of curved fronts when there exist some fronts in every direction, that is, pulsating fronts. We now introduce the notion of pulsating front by referring to [2, 23, 28,29,30].
Definition 1.1
Denote a periodic cell by \(\mathbb {T}^2=[0,L_1]\times [0,L_2]\). A pair \((U_e,c_e)\) with \(U_e:\mathbb {R}\times \mathbb {T}^2\rightarrow \mathbb {R}\) and \(c_e\in \mathbb {R}\) is said to be a pulsating front of (1.1) with effective speed \(c_e\) in the direction \(e\in \mathbb {S}\) connecting 0 and 1 if the two following conditions are satisfied:
-
(i)
For every \(\xi \in \mathbb {R}\), the profile \(U_e(\xi ,x,y)\) is L-periodic in (x, y) and satisfies
$$\begin{aligned} \lim _{\xi \rightarrow +\infty } U_e(\xi ,x,y)=0,\ \lim _{\xi \rightarrow -\infty } U_e(\xi ,x,y)=1,\,\text { uniformly for}\quad (x,y)\in \mathbb {T}^2. \end{aligned}$$ -
(ii)
The map \(u(t,x,y):=U_e((x,y)\cdot e-c _e t,x,y)\) is an entire (classical) solution of the parabolic Eq. (1.1).
We now recall some existence results of pulsating fronts for the general reaction-diffusion equation in spatially periodic media
For one dimensional case of (1.5) when \(f(x,u)=g(x)f(u)\), Nolen and Ryzhik [22] proved the existence of pulsating fronts with nonzero speed by provided with some restrictions for g and f. Moreover, Ducrot, Giletti and Matano [9] also got some existence results of pulsating fronts with a positive speed, if the solutions of (1.5) with some compactly supported initial conditions can converge locally uniformly to 1 as \(t\rightarrow +\infty \). Still for one-dimensional case, Ding, Hamel and Zhao [7] applied the implicit function theorem and abstract results of Fang and Zhao [12] to get the existence of pulsating fronts for small period and large period. For higher dimensions, when the diffusivity matrix a is close to identity and f is independent of x, the existence of pulsating fronts is obtained by Xin [28,29,30] through refined perturbation arguments. Ducrot [8] also got some existence results of fronts connecting 0 and 1 in every direction for slowly varying medium and rapidly varying medium (that is, \(d<<1\) and \(d>>1\) respectively when the reaction term is f(dx, u)), in which the fronts are either moving pulsating waves or standing transition waves. Although such existence results are known, there may not exist pulsating fronts in general. Zlatoš [33] constructed a periodic pure bistable reaction such that there is no pulsating fronts of (1.1). We also refer to [7, 31, 32] for some nonexistence results.
In this work, we aim to construct curved fronts by using some pulsating fronts with nonzero speeds. Therefore, we need to assume a priori that
-
(H1)
\(\int _{\mathbb {T}^2\times [0,1]} f(x,y,u)dxdydu\ne 0\),
-
(H2)
for every unit vector \(e\in \mathbb {R}^2\), the Eq. (1.1) admits a pulsating front \(U_e((x,y)\cdot e-c _e t,x,y)\) with \(c_e\ne 0\).
From the results of Ducrot [8] and Guo [15], one knows that if (H1), (H2) hold, the propagation speed \(c_e\) of the pulsating front in every direction has the sign of \(\int _{\mathbb {T}^2\times [0,1]} f(x,y,u)dxdydu\). We assume, without loss of generality, that
which implies \(c_e>0\) for all \(e\in \mathbb {S}\). Otherwise, one can replace u, f, \(U_e(\xi ,x,y)\) by \(\tilde{u}=1-u\), \(g(x,y,u)=-f(x,y,1-u)\), \(\tilde{U}_e(\xi ,x,y)=1-U_e(-\xi ,x,y)\) and consider the new pulsating front \(\tilde{U}_e\) with speed \(-c_e\). From [3] and [15], the speed \(c_e\) and the profile \(U_e\) of the pulsating front are unique up to shifts in time for any direction e. We fix the pulsating front in every direction e by
From [15], we also know that \(\partial _{\xi } U_e<0\), the family \(\{c_e\}_{e\in \mathbb {S}}\) is uniformly bounded with respect to e and the minimum and maximum of \(c_e\) can be reached with the following inequality:
In the whole paper, we always assume that (F1)–(F3), (H1)–(H2) and (1.6) hold and we do not repeat it in the sequel. We now focus on construction of curved fronts by some pulsating fronts. To the best of our knowledge, few results of the existence of curved fronts are known for bistable reaction-diffusion in spatially periodic media. However, one can refer to [10, 11] for the existence of curved fronts of monostable and combustion reaction-diffusion equations with a periodic shear flow and refer to [4] for a space-time periodic monostable reaction-advection-diffusion equation. Although the pulsating front \(U_e((x,y)\cdot e-c_e t,x,y)\) is not exactly planar, every level set is still bounded with a plane. Thus, the pulsating front is also called almost-planar in the framework of transition fronts (see [17]). We try to apply the ideas of Ninomiya and Taniguchi [21] which they used for homogeneous bistable case, to construct the curved fronts. But, since the profiles \(U_e\) and speeds \(c_e\) of pulsating fronts are different in general with respect to the direction e, we have to update their ideas.
We then claim our results. Let \(\alpha \in (0,\pi )\). Then, by Assumption (H2), there exists a pulsating front in the direction \((\cos \alpha ,\sin \alpha )\), that is,
For any \(\alpha \), \(\beta \in (0,\pi )\), define
which is a subsolution of (1.1). Our first result shows the existence of a curved front which converges to pulsating fronts along its asymptotic lines under some conditions on angles \(\alpha \) and \(\beta \). The curved front is actually a transition front connecting 0 and 1 whose interfaces can be chosen as a V-shaped curve.
Theorem 1.2
For any \(\theta \in (0,\pi )\), let \(g(\theta )=c_{\theta }/\sin \theta \). For any \(0<\alpha<\beta <\pi \) such that
there exists an entire solution V(t, x, y) of (1.1) such that \(V_t(t,x,y)>0\) for all \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) and
Remark 1.3
In [15], Guo has shown that \(c_e\) is differentiable with respect to \(e\in \mathbb {S}\) and hence \(c_{\theta }=c_{(\cos \theta ,\sin \theta )}\) is differentiable with respect to \(\theta \). Obviously, \(g(\theta )\) is then differentiable with respect to \(\theta \in (0,\pi )\). Recently, Ding and Giletti [6] have shown that the set of admissible speeds \(c_e\) is rather large and it is conjectured that \(c_e\) could be any continuous sign-unchanging function. It means that conditions \(g'(\alpha )<0\) and \(g'(\beta )>0\) could be easily satisfied. We will also show that conditions \(g'(\alpha )<0\) and \(g'(\beta )>0\) are not empty later. It seems that in Theorem 1.2, conditions \(g'(\alpha )<0\) and \(g'(\beta )>0\) can not be removed by our methods. These conditions are actually true for homogeneous unbalanced bistable case with the reaction term having positive integration from 0 to 1 (\(\alpha \) has to be smaller than \(\pi /2\) in this case by symmetry and \(\beta =\pi -\alpha \)), but false for homogeneous balanced bistable case. Moreover, the V-shaped front exists in homogeneous unbalanced bistable case, but does not exist in homogeneous balanced bistable case, see [18]. Nevertheless, for the balanced case, there exist some fronts whose level sets have an exponential shape for 2-dimensional space and a paraboloidal shape for N-dimensional space with \(N\ge 3\), see [5, 26, 27].
Remark 1.4
One can easily check that the curved front V(t, x, y) in Theorem 1.2 is a transition front connecting 0 and 1 (see [17] for the definition) with sets
and
Notice that for any fixed t, \(\Gamma _t\) is a connected polyline since \(c_{\alpha }/\sin \alpha =c_{\beta }/\sin \beta \) and the shape of \(\Gamma _t\) is invariant with respect to t. Moreover, by the definition of the global mean speed [17], the curved front V(t, x, y) has a global mean speed equal to \(\min \{c_{\alpha },c_{\beta }\}\), in the sense that
Here, the distance d(A, B) between two subsets A and B of \(\mathbb {R}^2\), is defined by the smallest geodesic distance between pairs of points in A and B. Another definition of the distance \(\tilde{d}\) like
could be used. Then, there holds that \(d(A,B)\le \tilde{d}(A,B)\) and the global mean speed is equal to \(\max \{c_{\alpha },c_{\beta }\}\), in the sense that
This is different with the homogeneous case, in which the global mean speeds under these two definitions are the same, see [17] and see [16] for the underlying domains being exterior domains and domains with multiple branches.
We then show that the condition (1.8) is not empty, that is, it is satisfied when \(\alpha \) close to 0 and \(\beta \) close to \(\pi \), see Fig. 1.

An example of \(\alpha \) and \(\beta \) satisfying (1.8)
Corollary 1.5
There exist \(0<\alpha _1<\beta _1<\pi \) such that for any \(\alpha \in (0,\alpha _1)\), there is \(\beta \in (\beta _1,\pi )\) such that (1.8) holds for such \(\alpha \), \(\beta \) and there exists an entire solution V(t, x, y) of (1.1) satisfying (1.9).
Indeed, one can rotate the coordinate such that y-axis points to any direction. Although the periodicity is not preserved by rotation, the same proofs of Theorem 1.2 and Corollary 1.5 can be applied. Therefore, Corollary 1.5 implies that for any two pulsating fronts whose propagation directions are close to reversed with each other, one can use them to construct a curved front.
Corollary 1.6
There exist \(0<\rho <1\) such that for any directions \(e_1\), \(e_2\) with \(-1<e_1\cdot e_2<-1+\rho \), there exist a direction \(e_0\) such that
and there is an entire solution V(t, x, y) of (1.1) satisfying
where
By Theorem 1.2, one knows that (1.8) is a sufficient condition for the existence of V(t, x, y) satisfying (1.9). However, we cannot show that (1.8) is necessary, but can show that (1.8) without \(g'(\alpha )<0\) and \(g'(\beta )>0\) is necessary.
Theorem 1.7
If there are two angles \(\alpha \) and \(\beta \) of \((0,\pi )\) and a constant \(c_{\alpha \beta }>0\) such that there exists an entire solution V(t, x, y) of (1.1) satisfying (1.9), then it holds that
Now, we show the uniqueness and the stability of the curved front V(t, x, y).
Theorem 1.8
For any fixed \(0<\alpha<\beta <\pi \) satisfying
the entire solution V(t, x, y) of (1.1) satisfying (1.9) is unique; that is, if there is an entire solution \(V^*(t,x,y)\) satisfying (1.9), then \(V^*(t,x,y)\equiv V(t,x,y)\).
Theorem 1.9
Let \(\alpha \) and \(\beta \) be fixed angles satisfying (1.8) and V(t, x, y) be the entire solution of (1.1) satisfying (1.9). Let \(0\le u_0(x,y)\le 1\) be an initial value satisfying
Then, the solution u(t, x, y) of (1.1) for \(t>0\) with \(u(0,x,y)=u_0(x,y)\) satisfies
Next, we construct a transition front connecting 0 and 1 with varying interfaces. Such a kind of transition front is known in homogeneous case by [17], in which the solution is orthogonal symmetric with respect to y-axis and behaves as three planar fronts as \(t\rightarrow -\infty \). However, in our case, this transition front can not be symmetric in general.
Theorem 1.10
Let \(\alpha \) and \(\beta \) be fixed angles satisfying (1.8) and let \(V_{\alpha \beta }(t,x,y)\) be the entire solution of (1.1) satisfying (1.9). Denote \(e_\alpha =(\cos \alpha ,\sin \alpha )\) and \(e_\beta =(\cos \beta ,\sin \beta )\). Assume that there exist another angle \(\theta \in (\alpha ,\beta )\) and a direction \(e_{\theta }=(\cos \theta ,\sin \theta )\) such that
-
(i)
for \(e_{\alpha }\) and \(e_{\theta }\), there is a direction \(e_{\alpha \theta }\) such that (1.10) holds for \(e_1=e_{\alpha }\), \(e_2=e_{\theta }\) and \(e_0=e_{\alpha \theta }\), it holds \(h'(\alpha )<0\) where \(h(s)=c_{s}/(e_{\alpha \theta }\cdot (\cos s,\sin s))\) for \(0<s<\theta \) and there is an entire solution \(V_{\alpha \theta }(t,x,y)\) satisfying (1.11).
-
(ii)
for \(e_{\beta }\) and \(e_{\theta }\), there is a direction \(e_{\beta \theta }\) such that (1.10) holds for \(e_1=e_{\beta }\), \(e_2=e_{\theta }\) and \(e_0=e_{\beta \theta }\), it holds \(h'(\beta )>0\) where \(h(s)=c_{s}/(e_{\beta \theta }\cdot (\cos s,\sin s))\) for \(\theta<s<\pi \) and \(e_0=e_{\alpha \theta }\) and there is an entire solution \(V_{\beta \theta }(t,x,y)\) satisfying (1.11).
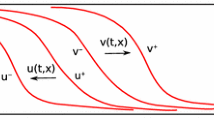
Then, there exists an entire solution u(t, x, y) of (1.1) such that
and
The convergence in above theorem is in the sense of \(L^{\infty }\) norm.
Remark 1.11
From the proof of Theorem 1.10, one can easily check that the entire solution u(t, x, y) is a transition front connecting 0 and 1 with the interfaces
and
see Fig. 2.

Left: interface when \(t<<-1\); Right: interface when \(t>>1\)
Finally, we give an example showing that Theorem 1.10 is not empty.
Corollary 1.12
Assume that \(e_*\) is the direction such that the family of speeds \(\{c_{e}\}_{e\in \mathbb {S}}\) reaches its minimum, that is, \(c_{e_*}=\min _{e\in \mathbb {S}}\{c_{e}\}\). Then, there exist \(e_1\) and \(e_2\) close to \(e_*\) such that (1.10) holds for \(e_0=e_*\) and there is an entire solution \(V_{e_1e_2}(t,x,y)\) of (1.1) satisfying (1.11). Moreover, there exist a direction \(e_3\) close to \(-e_*\) and a direction \(e_{**}\) such that there is an entire solution u(t, x, y) of (1.1) such that
as \(t\rightarrow -\infty \) and
rest of this paper as organized as follows: in Section 2, we first prove the existence of the curved front, that is, Theorem 1.2. Then, we give some examples showing that Theorem 1.2 is not empty. We also show a necessary condition for the existence of the curved front in this section. Section 3 is devoted to the proof of the uniqueness and stability of the curved front in Theorem 1.2. In Section 4, we construct a curved front with varying interfaces and give an example.
2 Existence of Curved Fronts
This section is devoted to the construction of a curved front satisfying Theorem 1.2. We will need some properties of the pulsating front, especially the differentiability of the profile \(U_e\) and the speed \(c_e\) with respect to the direction e.
2.1 Preliminaries
We will use the hyperbolic function \(\text {sech}(x)\) frequently in the sequel. Thus, we recall some known properties of it which can be checked easily.
Lemma 2.1
It holds that
and there is a positive constant p such that
Then, we need a smooth V-shaped curve with \(y=-x\cot \alpha \) and \(y=-x\cot \beta \) being its asymptotic lines.
Lemma 2.2
For any \(0<\alpha<\beta <\pi \), there is a smooth function \(\psi (x)\) for \(x\in \mathbb {R}\) with \(y=-x\cot \alpha \) and \(y=-x\cot \beta \) being its asymptotic lines and there are positive constants \(k_1\), \(k_2\) and \(K_1\) such that
Proof
Let \(0<\alpha<\beta <\pi \). Since \(\alpha <\beta \), there are two positive constants a, b and a smooth function \(\varphi (x)\) such that
An example of such a function is that one can take an incircle of the straight lines \(y=-x\cot \alpha \) and \(y=-x\cot \beta \) with tangent points \((-a,a\cot \alpha )\) and \((b,-b\cot \beta )\) and \(\varphi (x)\) is made of the line \(y=-x\cot \alpha \) for \(x\le -a\), the arc of the incircle between \(-a\) and b, and the line \(y=-x\cot \beta \) for \(x\ge b\). One can mollify \(\varphi (x)\) at \((-a,a\cot \alpha )\) and \((b,-b\cot \beta )\) such that \(\varphi (x)\in C^{\infty }(\mathbb {R})\), see Fig. 3. Define a smooth function \(\psi (x)\) as follows:
Here \(\rho >0\) is a constant. Since \(\text {sech}''(x)\) is bounded and by Lemma 2.1, one can make \(\rho \) small enough and a, b sufficiently large such that
Moreover, one can easily check that \(\psi (x)\) satisfies all properties in (2.1). This completes the proof.

The function \(\varphi (x)\)
We now recall some properties of the pulsating front \(U_e((x,y)\cdot e-c_e t,x,y)\). One can substitute the form \(U_e((x,y)\cdot e-c_e t,x,y)\) into (1.1) and get that \((U_e(\xi ,x,y),c_e)\) satisfies the semi-linear elliptic degenerate equation
From [15, Lemma 2.1], we have
Lemma 2.3
For any pulsating front \((U_e(\xi ,x,y),c_e)\) with \(c_e> 0\), there exist \(\mu _1>0\), \(\mu _2>0\), \(C_1>0\) and \(C_2>0\) independent of e such that
Then, by standard parabolic estimates applied to \(u(t,x,y)=U_e((x,y)\cdot e-c_e t,x,y)\), one can get that \(|\nabla _{x,y}u_t|,\ |u_{tt}|,\ |u_t|\le C u(t+1,x,y)\) for some constant \(C>0\) and \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\). Notice that \(u_t(t,x,y)=-c_e \partial _{\xi } U_e((x,y)\cdot e-c_e t,x,y)\) with \(c_e>0\). Then, by Lemma 2.3, we have the following lemma:
Lemma 2.4
For any pulsating front \((U_e(\xi ,x,y),c_e)\) with \(c_e> 0\), there exist \(\mu _3>0\) and \(C_3>0\) independent of e such that
We also need the following properties:
Lemma 2.5
For any \(C>0\), there is \(0<\delta <1/2\) independent of e such that
and there is \(r>0\) independent of e such that
Proof
Let \(u(t,x,y)=U_e((x,y)\cdot e-c_e t,x,y)\). One can easily check that u(t, x, y) is a transition front connecting 0 and 1 with set \(\{(t,x,y)\in \mathbb {R}\times \mathbb {R}^2; (x,y)\cdot e-c_e t=0\}\) being its interfaces. Then, by [3, Theorem 1.2], one immediately has that there is \(0<\delta <1/2\) such that
By continuity of \(U_e\) with respect to e (see [15]), one has that \(\delta \) can be independent of e.
The following proof for (2.4) can be simplified for the pulsating front \(U_e\). However, we do it in a general way in purpose that such idea can be used to prove that the curved front which we construct later has similar properties. Notice that \(u_t(t,x,y)>0\) satisfies
Assume that there is a sequence \(\{(t_n,x_n,y_n)\}_{n\in \mathbb {N}}\) of \(\mathbb {R}\times \mathbb {R}^2\) such that \(-C\le (x_n,y_ n)\cdot e-c_e t_n\le C\) and \(u_t(t_n,x_n,y_n)\rightarrow 0\) as \(n\rightarrow +\infty \). Since f(x, y, u) is periodic in (x, y), there is \((x',y')\in \mathbb {R}^2\) such that \(f(x+x_n,y+y_n,u)\rightarrow f(x+x',y+y',u)\) as \(n\rightarrow +\infty \). Let \(u_n(t,x,y)=u(t+t_n,x+x_n,y+y_n)\) and \(v_n(t,x,y)=u_t(t+t_n,x+x_n,y+y_n)\). By standard parabolic estimates, \(u_n(t,x,y)\) converges to a solution \(u_{\infty }(t,x,y)\) of
and \(v_n(t,x,y)\) converges to a solution \(v_{\infty }(t,x,y)\) of
Moreover, \(v_{\infty }(t,x,y)\) satisfies \(v_{\infty }(t,x,y)\ge 0\) and \(v_{\infty }(0,0,0)=0\). By the maximum principle, \(v_{\infty }(t,x,y)\equiv 0\). Since \(U_e(\xi ,x,y)\rightarrow 1\) as \(\xi \rightarrow -\infty \), there is \(R>0\) large enough such that
where \(\sigma \) is defined in (F3). Take \((x_*,y_*)\in \mathbb {R}^2\) such that \((x_*,y_*)\cdot e<-R-C\). Then, \(v_{\infty }(t,x,y)\equiv 0\) implies that \(u_t(t+t_n,x+x_*+x_n,y+y_*+y_n)\rightarrow 0\) as \(n\rightarrow +\infty \) locally uniformly in \(\mathbb {R}\times \mathbb {R}^2\). Notice that \((x_*+x_n,y_*+y_n)\cdot e -c_e t_n\le -R\) and hence, \(u(t_n,x_*+x_n,y_*+y_n)\ge 1-\sigma \). Also notice that 1 is the only equilibrium of (1.1) over \(1-\sigma \) from (F3) and (1.2). It further implies that \(u(t+t_n,x+x_*+x_n,y+y_*+y_n)\rightarrow 1\) locally uniformly in \(\mathbb {R}\times \mathbb {R}^2\). Since \((x_*,y_*)\) is fixed and \(-C\le (x_n,y_n)\cdot e -c_e t_n\le C\), it reaches a contradiction with (2.3). This completes the proof.
It follows from [15, Theorem 1.5] that \(U_e\) and \(c_e\) are differentiable with respect to e. Remember that \(U_e\) are normalized by \(U_e(0,0,0)=1/2\) for all \(e\in \mathbb {S}\). For any \(b\in \mathbb {R}^2\setminus \{0\}\), define
Define Banach spaces as follows:
and
and define their norms as
and
Lemma 2.6
Let \(U_b\) and \(c_b\) be defined in (2.5). Then, \(U_b\) and \(c_b\) are doubly continuously Fréchet differentiable at any \(b\in \mathbb {R}^N\setminus \{0\}\), that is, there exist linear operators \((U'_b,c_b'):\mathbb {R}^2\rightarrow L^2(\mathbb {R}\times \mathbb {T}^2)\times \mathbb {R}\) and \((U''_b,c''_b):\mathbb {R}^2\times \mathbb {R}^2\rightarrow L^2(\mathbb {R}\times \mathbb {T}^2)\times \mathbb {R}\) such that for any h, \(\rho \in \mathbb {R}^2\), \((U_{b+h},c_{b+h})-(U_b,c_b)=(U'_b,c'_b)\cdot h +o(|h|)\), \((U'_{b+\rho }\cdot h,c'_{b+\rho }\cdot h)-(U'_{b}\cdot h,c'_{b}\cdot h)=(U''_b\cdot h,c''_b\cdot h)\cdot \rho +o(|\rho |)\) as |h|, \(|\rho |\rightarrow 0\).
Let us denote the Fréchet derivatives up to second order of \(U_e\) and \(c_e\) with respect to e by \(U'_e\), \(U''_e\), \(c'_e\) and \(c''_e\). The Fréchet derivatives are all bounded in the sense that
and
The boundedness of \(c'_e\) and \(c''_e\) can be easily followed. Let \(h\in \mathbb {R}^N\) with \(|h|=1\). One can also easily get that \(\Vert U'_e\cdot h\Vert _{L^2(\mathbb {R}\times \mathbb {T}^2)}\) is uniformly bounded for any \(h\in \mathbb {R}^N\) with \(|h|=1\). By differentiating (2.2), it follows that
By rewriting (2.6) in its weak form in the variables (t, x, y) (namely \(\xi =(x,y)\cdot e -c_e t\)), it follows from parabolic regularity theory and bootstrap arguments that \(U'_e\cdot h\) is a bounded classical solution of (2.6) and the \(L^{\infty }\) bound of \(U'_e\cdot h\) is uniform for \(h\in \mathbb {R}^N\) with \(|h|=1\). Thus, \(U'_e\) is bounded in the above sense. Similar arguments can be applied to \(U''_e\). We also know from [15] that for any \(h\in \mathbb {R}^2\), \(\rho \in \mathbb {R}^2\), \(U'_e\cdot h\) and \((U''_e\cdot h)\cdot \rho \) are differentiable with respect to \(\xi \), x and y up to second order and these derivatives are bounded too. We then need the following properties of \(U_e'\):
Lemma 2.7
For any \(e\in \mathbb {S}\), there exist \(\mu _4>0\) and \(C_4>0\) independent of e such that
Proof
Take a smooth nonincreasing function \(p(\xi )\) such that
for some positive constants r and b. Here, one can make r and b to be small and large enough respectively such that
and
where \(\lambda >0\) is defined in (F3).
For every direction e, we define a function \(V_e(\xi ,x,y)\) by
By Lemmas 2.3, 2.4 and (2.7), one has
\(V_e(\xi ,x,y)\in L^2(\mathbb {R}^+\times \mathbb {T}^2)\), \(1-V_e(\xi ,x,y)\in L^2(\mathbb {R}^-\times \mathbb {T}^2)\) and all derivatives of \(V_e\) up to second order are in \(L^2(\mathbb {R}\times \mathbb {T}^2)\). Since \(U_e(\xi ,x,y)\) satisfies (2.2), one can get that \(V_e(\xi ,x,y)\) satisfies
From (F3) and (2.8), there is \(C>0\) such that
For any \(e\in \mathbb {S}\), define a linear operator
where \(\beta >0\) is a fixed real number and
The space D is endowed with the norm \(\Vert v\Vert _{D}=\Vert v\Vert _{H^1(\mathbb {R}\times \mathbb {T}^N)}+\Vert \partial _{\xi \xi }v+2\nabla _y\partial _{\xi }v\cdot e+\Delta _y v\Vert _{L^2(\mathbb {R}\times \mathbb {T}^N)}\). Then, by the similar proofs of Lemma 3.1, Lemma 3.2 and Lemma 3.3 in [7] (one can trivially extend the proofs to the high dimensional space), one knows that \(M_e\) satisfies all the properties in Lemma 2.7 of [15], such as invertibility and boundedness. For any \(e\in \mathbb {S}\), we then define
Notice that \(H_e(v)=\widetilde{H}_e(pv)/p\) with \(0<p(\xi )\le 1\), where
By Lemma 4.1 in [7], one knows that the operator \(\widetilde{H}_e\) and its adjoint operator \(\widetilde{H}^*_e\) have algebraically simple eigenvalue 0 and the kernel of \(\widetilde{H}_e\) is generated by \(\partial _{\xi } U_e\). Therefore, the operator \(H_e\) and its adjoint operator \(H^*_e\) also have algebraically simple eigenvalue 0 and the kernel of \(H_e\) is generated by \(p^{-1}\partial _{\xi } U_e\). Moreover, the property that the range of \(H_e\) is closed in \(L^2(\mathbb {R})\times \mathbb {T}^2\) can be proved in the same line of the proof of [7, Lemma 4.1] by using (2.9).
Now, for any \(e\in \mathbb {S}\), \(v\in H^2(\mathbb {R}\times \mathbb {T}^2)\), \(\vartheta \in \mathbb {R}\) and \(\eta \in \mathbb {R}^2\), define
and
By following the proof of [15, Lemma 2.10], one can get that for every \(e\in \mathbb {S}\), the function \(G_e:\ H^2(\mathbb {R}\times \mathbb {T}^N)\times \mathbb {R}\times \mathbb {R}^N\rightarrow D\times \mathbb {R}\) is continuous and it is continuously Fréchet differentiable with respect to \((v,\vartheta )\) and doubly continuously Fréchet differentiable with respect to \(\eta \). For any \(e\in \mathbb {S}^{N-1}\) and \((\tilde{v},\tilde{\vartheta })\in D\times \mathbb {R}\), define
which has the same form as \(\partial _{(v,\vartheta )} G_e(0,0,0)\). By the properties of \(H_e\) and the same line of the proofs of [7, Lemma 3.3] and [15, Lemma 2.11], one can get that \(Q_e\) satisfies all properties in [15, Lemma 2.11], such as invertibility and boundedness.
As soon as we have all these properties of these operators, we can follow the same proof of [15, Theorem 1.5] to get that \(V_b(\xi ,x,y)=p^{-1}(\xi ) U_b(\xi ,x,y)\) is doubly Fréchet differentiable at any \(b\in \mathbb {R}^2\setminus \{0\}\). Moreover, \(\Vert V_e'\Vert \) is bounded for any \(e\in \mathbb {S}\).
Thus, by the definition of Fréchet differentiation, we have
Therefore, there exists a positive constant \(C_4\) such that
By applying similar arguments to the other side, that is, \(\xi <0\), one can also get that there are positive constants \(C_5\) and \(\mu _5\) such that
Lastly, we differentiate (2.2) at e on \(h\in \mathbb {R}^2\) and get that
By changing variables \(\xi =(x,y)\cdot e-c_e t\), one has that \(u(t,x):=(U'_e\cdot h)((x,y)\cdot e-c_e t,x,y)\) satisfies a parabolic equation
By parabolic estimates, Lemma 2.4 and (2.10)-(2.11), one can get that there are positive constants \(C_6\) and \(\mu _6\) such that
that is,
This completes the proof.
2.2 Proof of Theorem 1.2
Take any two angles \(\alpha \), \(\beta \) of \((0,\pi )\) such that (1.8) holds. Let \(\psi (x)\) be a smooth function satisfying Lemma 2.2 for \(\alpha \) and \(\beta \). Take a constant \(\varrho \) to be determined later. For every point (x, y) on the curve \(y=\psi (\varrho x)/\varrho \), there is a unit normal
By Lemma 2.2, every component of e(x) is differentiable with respect to x and
its derivatives can be denoted by
and
Therefore, by Lemma 2.2, there exist \(K_2>0\) and \(K_3>0\) such that
Remember that \(U^-_{\alpha \beta }(t,x,y)\) defined by (1.7) is a subsolution of (1.1). Now, take a positive constant \(\varepsilon \) and we define
where
and \(c_{\alpha \beta }\) is defined by (1.8). We prove that \(U^+(t,x,y)\) is a supersolution of (1.1) for small \(\varepsilon \) and \(\varrho \).
Lemma 2.8
There exist \(\varepsilon _0>0\) and \(\varrho (\varepsilon _0)>0\) such that for any \(0<\varepsilon \le \varepsilon _0\) and \(0<\varrho \le \varrho (\varepsilon _0)\), the function \(U^+(t,x,y)\) is a supersolution of (1.1) with \(U^+_t>0\). Moreover, this satisfies
and
Proof
We divide the proof into three steps.
Step 1: \(U^+\) is a supersolution. We will pick \(\varepsilon _0>0\) and \(\varrho (\varepsilon )\) such that Lemma 2.8 holds. Assume that
where \(\sigma >0\) is defined in (F3). More restrictions on \(\varepsilon _0\) will be given later. One can compute that
where \(\partial _{\xi }U_{e(x)}\), \(\partial _{\xi \xi } U_{e(x)}\), \(\nabla _{x,y}\partial _{\xi } U_{e(x)}\), \(\Delta _{x,y}U_{e(x)}\), \(U''_{e(x)}\cdot e'(x)\cdot e'(x)\), \(U'_{e(x)}\cdot e''(x)\), \(\partial _{\xi }U'(e(x))\cdot e'(x)\), \(\partial _x U'_{e(x)}\cdot e'(x)\) are taking values at \((\xi (t,x,y),x,y)\) and \(U^+\), \(\xi _t\), \(\xi _x\), \(\xi _y\) are taking values at (t, x, y). By (2.15), it follows from a direct computation that
By noticing that \(\xi _y=e_2(x)\) and by (2.2), one has
where \(\partial _{\xi }U_{e(x)}\), \(\partial _{\xi \xi } U_{e(x)}\), \(\partial _{x}\partial _{\xi } U_{e(x)}\), \(U''_{e(x)}\cdot e'(x)\cdot e'(x)\), \(U'_{e(x)}\cdot e''(x)\), \(\partial _{\xi }U'(e(x))\cdot e'(x)\), \(\partial _x U'_{e(x)}\cdot e'(x)\), \(U_{e(x)}\) are taking values at \((\xi (t,x,y),x,y)\) and \(U^+\), \(\xi _t\), \(\xi _x\), \(\xi _y\) are taking values at (t, x, y). By Lemma 2.4, one has that \(|\partial _{\xi \xi }U_{e(x)}\xi ^2|\), \(|\partial _{\xi \xi } U_{e(x)} \xi |\), \(|\partial _{x}\partial _{\xi } U_{e(x)} \xi |\) and \(|\partial _{\xi } U_{e(x)} \xi |\) are uniformly bounded for \(\xi \in \mathbb {R}\), \((x,y)\in \mathbb {R}^2\). Then, by Lemmas 2.2 and (2.18), there is \(C_5>0\) such that
Since \(\Vert U'_{e}\Vert \), \(\Vert U''_{e}\Vert \), \(\Vert \partial _{\xi }U'_{e}\Vert \), \(\Vert \partial _xU'_e\Vert \) are bounded and by Lemma 2.7, (2.13), there is \(C_6>0\) such that
We make the following claim:
Claim 2.9
There is \(C_7>0\) such that
We postpone the proof of this claim after the proof of this lemma.
Then, it follows from (2.19), (2.20), (2.21), (2.22), Lemma 2.1 and \(\partial _{\xi } U_e<0\) that
By Lemma 2.3, there is \(C>0\) such that
uniformly for \((x,y)\in \mathbb {T}^2\) and \(e\in \mathbb {S}\). Then, for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(\xi (t,x,y)\ge C\) and \(\xi (t,x,y)\le -C\) respectively, one has that \(U^+(t,x,y)\le \sigma /2+\varepsilon \le \sigma \) and \(U^+(t,x,y)\ge 1-\sigma /2\) respectively since \(\varepsilon \le \varepsilon _0\le \sigma /2\) and hence, it follows from (1.2) that
Since \(\partial _{\xi } U_e<0\) and by (2.23), (2.25), one has that
by taking \(0<\varrho \le \varrho (\varepsilon )\) where \(\varrho (\varepsilon )>0\) is small enough such that
Finally, for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(-C\le \xi (t,x,y)\le C\), it follows from Lemma 2.5 that there is \(k>0\) such that
Notice that
where \(M:=\max _{(x,y,u)\in \mathbb {T}^2\times \mathbb {R}} |f_u(x,y,u)|\). Thus, it follows from (2.23), (2.26), (2.27) and (2.28) that
by taking \(\varepsilon _0=\min \{\sigma /2, kC_7/(\lambda +M)\}\) and \(0<\varepsilon \le \varepsilon _0\).
Therefore, \(LU^+\ge 0\) for all \(t\in \mathbb {R}\) and \((x,y)\in \mathbb {R}^2\). By the comparison principle, \(U^+(t,x,y)\) is a supersolution of (1.1). The property \(U^+_t>0\) comes from \(\partial _{\xi }U_e<0\) and \(c_{\alpha \beta }>0\).
Step 2: the proof of (2.16). Since \(e(x)\rightarrow (\cos \alpha ,\sin \alpha )\) as \(x\rightarrow -\infty \) and by the definition of \(U'_{e}\), there is \(R_1>0\) such that
Notice that \(1/\sqrt{\psi '^2(\varrho x)+1}\rightarrow \sin \alpha \) as \(x\rightarrow -\infty \) and \(c_{\alpha \beta }\sin \alpha =c_{\alpha }\). Then, by Lemma 2.2, one has that
Thus, there is \(R_2>0\) such that
By the definition of \(U^+(t,x,y)\) and together with (2.29), it follows that

Similarly, one can prove that there is \(R_3>0\) such that
Now, for \(-\max \{R_1,R_2\}\le x\le R_3\), we know that \(\psi (\varrho x)\) and \(\psi '(\varrho x)\) are bounded. Then, as \(y-c_{\alpha \beta } t\rightarrow +\infty \), one has that
Thus, there is \(R_4>0\) such that
and
for \(-\max \{R_1,R_2\}\le x\le R_3\) and \(y-c_{\alpha \beta }t\ge R_4\). Hence,
for \(-\max \{R_1,R_2\}\le x\le R_3\) and \(y-c_{\alpha \beta }t\ge R_4\). Similarly, since \(U_{e(x)}(-\infty ,x,y)=U_{\alpha }(-\infty ,x,y)=1\) uniformly for \((x,y)\in \mathbb {T}^2\), there is \(R_5\) such that
for \(-\max \{R_1,R_2\}\le x\le R_3\) and \(y-c_{\alpha \beta }t\le -R_5\).
On the other hand, since \(U_e(-\infty ,x,y)=1\) and \(U_e(+\infty ,x,y)=0\) for any \((x,y)\in \mathbb {T}^2\) and \(e\in \mathbb {S}\), it follows that there is \(C_{\varepsilon }>0\) such that
and
This then means that
For any fixed \(r\in \mathbb {R}\) and any point \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(x\cos \alpha +y\sin \alpha -c_{\alpha }t=r\), one has that
since \(-\pi<\alpha -\beta <0\) and \(c_{\alpha }/\sin \alpha =c_{\beta }/\sin \beta \). It implies that \(U_{\beta }(x\cos \beta +y\sin \beta -c_{\beta }t,x,y)\rightarrow 0\) as \(x\rightarrow -\infty \) uniformly for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(x\cos \alpha +y\sin \alpha -c_{\alpha }t=r\ge -C_{\varepsilon }\). While, by Lemma 2.5, there is \(\varepsilon '>0\) such that \(U_{\alpha }(r,x,y)\ge \varepsilon '\) for \(-C_{\varepsilon }\le r\le C_{\varepsilon }\). Thus, there is \(R_6>0\) such that
and
It follows that
For any point \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(x\cos \beta +y\sin \beta -c_{\beta } t =r\), one has that
This implies that \(U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha } t,x,y)\rightarrow 1\) as \(x\rightarrow -\infty \) uniformly for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(x\cos \beta +y\sin \beta -c_{\beta } t=r\le C_{\varepsilon }\). While, by Lemma 2.5, there is \(\varepsilon ''>0\) such that \(U_{\beta }(r,x,y)\le 1-\varepsilon ''\) for \(-C_{\varepsilon }\le r\le C_{\varepsilon }\). Thus, even if it means increasing \(R_6\), one can get that
and
It follows that
By (2.34)-(2.38), one gets that
and
for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(x\le -R_6\), \(x\cos \alpha +y\sin \alpha -c_{\alpha } t\ge C_{\varepsilon }\) and \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(x\le -R_6\), \(x\cos \beta +y\sin \beta -c_{\beta } t\ge -C_{\varepsilon }\). Above arguments also imply that
Similar proof can deduce that
Combined with (2.30), it follows that
Similarly, there is \(R_7>0\) such that
By (2.32), (2.33), (2.39) and (2.40), we have our conclusion (2.16).
Step 3: the proof of (2.17). We only have to prove that \(U^+(t,x,y)\ge U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t)\) and \(U^+(t,x,y)\ge U_{\beta }(x\cos \beta +y\sin \beta -c_{\beta }t)\) for all \(t\in \mathbb {R}\) and \((x,y)\in \mathbb {R}^2\).
Since \(U_e(-\infty ,x,y)=1\) and \(U_e(+\infty ,x,y)=0\) for any \((x,y)\in \mathbb {T}^2\) and \(e\in \mathbb {S}\), there is \(C>0\) such that
and
where \(\sigma \) is defined in (F3). By (2.16) and letting \(\varepsilon \le \sigma /4\), there is \(R>0\) such that
where
and
Notice that for any t, the boundaries of \(\Omega ^+_t\) and \(\Omega ^-_t\) are connected polylines since \(c_{\alpha }/\sin \alpha =c_{\beta }/\sin \beta \). By Lemma 2.5 and the definition of \(U^+(t,x,y)\), there is \(0<\sigma '\le \sigma \) such that
and
For any \(\tau \in \mathbb {R}\), let \(u_{\tau }(t,x,y)=U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t+\tau )\). Let
and
Notice that since \(\alpha <\beta \), one has that
and
Thus,
Then, by (2.16), \(U_e(-\infty ,x,y)=1\) and \(U_e(+\infty ,x,y)=0\), there is \(\tau _1\ge c_{\alpha }R+C\) large enough such that for any \(\tau \ge \tau _1\),
and
Moreover, since \(\tau \ge \tau _1\ge c_{\alpha }R+C\), one has that
Thus, it follows that
Also notice that
and f(x, y, u) is nonincreasing in \(u\in (-\infty ,\sigma ]\) and \(u\in [1-\sigma ,+\infty )\) for any \((x,y)\in \mathbb {T}^2\) by (1.2). By following similar proof as the proof of [3, Lemma 4.2] which mainly applied the sliding method and the linear parabolic estimates, one can get that
Combined with (2.41), one has that
Now, we decrease \(\tau \). Define
From above arguments, one knows that \(\tau _*<+\infty \). Since \(U^+(t,x,y)\rightarrow U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t,x,y)\) as \(x\rightarrow -\infty \), \(U_{\alpha }(\xi ,x,y)\) is decreasing in \(\xi \) and by the definition of \(u_{\tau }(t,x,y)\), one also knows that \(\tau _*\ge 0\). Assume that \(\tau _*>0\). If
then there is \(\eta >0\) such that
Then, one can apply the above arguments again and get that \(U^+(t,x,y)\ge u_{\tau _*-\eta }(t,x,y)\) for all \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) which contradicts the definition of \(\tau _*\). Thus,
Since \(\alpha <\beta \), there is a sequence \(\{(t_n,x_n,y_n)\}_{n\in \mathbb {N}}\) in \(\mathbb {R}\times \mathbb {R}^2\setminus (\omega ^-_{\tau _*}\cup \Omega _R^+)\) such that
and
Then, there is \(\xi _*\in \mathbb {R}\) such that \(x_n\cos \alpha +y_n\sin \alpha -c_{\alpha }t_n\rightarrow \xi _*\) as \(n\rightarrow +\infty \). Since \(U^+(t,x,y)\rightarrow U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t,x,y)\) as \(x\rightarrow -\infty \), \(U^+(t,x,y)\rightarrow U_{\beta }(x\cos \beta +y\sin \beta -c_{\beta }t,x,y)\) as \(x\rightarrow +\infty \) with \(\alpha <\beta \) and \(\tau _*>0\), one has that \(x_n\) is bounded and there is \(x_*\in \mathbb {R}\) such that \(x_n\rightarrow x_*\) as \(n\rightarrow +\infty \). Again by \(U^+(t,x,y)\rightarrow U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t,x,y)\) as \(x\rightarrow -\infty \) and by (2.30), there is \(R'>0\) such that
Let \(v(t,x,y)=U^+(t,x,y)-u_{\tau _*}(t,x,y)\). Then, \(v(t,x,y)\ge 0\) and
by (2.42), \(\tau _*>0\) and taking \(\varepsilon \) sufficiently small. Since \(U^+(t,x,y)\) is a supersolution and \(u_{\tau _*}(t,x,y)\) is a solution of (1.1), we have that v(t, x, y) satisfies
where b(x, y) is bounded. Since \(v(t_n,x_n,y_n)\rightarrow 0\) and by the linear parabolic estimates and \(x_n\) is bounded, one gets that
which contradicts (2.43). Thus, \(\tau _*=0\) and \(U^+(t,x,y)\ge U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t,x,y)\) for all \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\).
Similarly one can prove that \(U^+(t,x,y)\ge U_{\beta }(x\cos \beta +y\sin \beta -c_{\beta }t,x,y)\) for all \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\). In conclusion, \(U^+(t,x,y)\ge U^-_{\alpha \beta }(t,x,y)\) for all \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\).
Proof of Claim 2.9
Notice that
Let \(\hat{\theta }(x)=\arccos e_1(x)\). By Lemma 2.2, one can get that \(\alpha<\hat{\theta }(x)<\beta \) for all \(x\in \mathbb {R}\) and \(\hat{\theta }(-\infty )=\alpha \), \(\hat{\theta }(+\infty )=\beta \). Then, \(e(x)=(\cos \hat{\theta },\sin \hat{\theta })\) and
Thus,
Since \(c_{\alpha \beta }>c_{\theta }/\sin \theta \) for any \(\theta \in (\alpha ,\beta )\) and \(0<\min \{\sin \alpha ,\sin \beta \}\le \sin \hat{\theta }\le 1\), one only has to prove that
We only consider when \(x<0\) and similar arguments can be applied for \(x>0\). Define
Obviously, \(g(\theta )\) is a \(C^2\) function since \(c_{e}\) is doubly differentiable with respect to e. By (1.8), one has that \(g'(\alpha )<0\). Since \(\hat{\theta }(x)\rightarrow \alpha \) as \(x\rightarrow -\infty \), it then follows that
Moreover, by (2.1), one has that
One then can conclude (2.44) from (2.45) for x negative enough.
Now, we are ready to prove Theorem 1.2.
Proof of Theorem 1.2
Let \(u_n(t,x)\) be the solution of (1.1) for \(t\ge -n\) with initial data
By Lemma 2.8, one can get from the comparison principle that
Since \(U^-_{\alpha \beta }(t,x,y)\) is a subsolution, the sequence \(u_n(t,x,y)\) is increasing in n. Letting \(n\rightarrow +\infty \) and by parabolic estimates, the sequence \(u_n(t,x,y)\) converges to an entire solution V(t, x, y) of (1.1). By (2.46), one has that
Then, it follows from Lemma 2.8 that (1.9) holds.
By \(U_{\alpha \beta }^-(t,x,y)\) is increasing in t and the maximum principle, one has that \((u_n)_t(t,x,y)>0\) for all \(t\in (-n,+\infty )\) and \((x,y)\in \mathbb {R}^2\). By letting \(n\rightarrow +\infty \) and the strong maximum principle, one concludes that \(u_t(t,x,y)>0\) for all \(t\in \mathbb {R}\) and \((x,y)\in \mathbb {R}^2\). This completes the proof.
2.3 Proofs of Corollaries 1.5, 1.6 and Theorem 1.7
We then give some examples to show that Theorem 1.2 is not empty, that is, Corollaries 1.5, 1.6.
Proof of Corollary 1.5
Notice that \(c_{\theta }\) and \(c'_{\theta }\) are uniformly bounded for \(\theta \in [0,\pi ]\). Let \(g(\theta ):=c_{\theta }/\sin \theta \). Then,
Obviously, there are constants \(0<\alpha _1<\beta _1<\pi \) such that \(g'(\theta )<0\) for \(\theta \in (0,\alpha _1)\) and \(g'(\theta )>0\) \(\theta \in (\beta _1,\pi )\) since \(c'_e\) is bounded for any \(e\in \mathbb {S}\) and \(\sin \theta \rightarrow 0\) as \(\theta \rightarrow 0\) or \(\pi \). One can also notice that \(g(\theta )\rightarrow +\infty \) as \(\theta \rightarrow 0\) or \(\theta \rightarrow \pi \). By continuity, one can take any \(\alpha \in (0,\alpha _1)\) and there is \(\beta \in (\beta _1,\pi )\) such that \(g(\alpha )=g(\beta )\) and \(g(\theta )<g(\alpha )=g(\beta )\) for all \(\theta \in (\alpha ,\beta )\).
Then, the conclusion of Corollary 1.5 follows from Theorem 1.2.
Proof of Corollary 1.6
Take two directions \(e_1=(\cos \theta _1,\sin \theta _1)\) and \(e_2=(\cos \theta _2,\sin \theta _2)\) where \(\theta _1\), \(\theta _2\in (0,2\pi )\). Assume without loss of generality that \(\theta _2>\theta _1\). Rotate the coordinate by changing variables as
where \(\theta \) varies from \(\theta _2-\pi /2\) to \(\theta _1+\pi /2\). Assume without loss of generality that \(\theta _2-\theta _1<\pi \). Otherwise, if \(\theta _2-\theta _1>\pi \), we can take \(\theta \) varying from \(\theta _2\) to \(2\pi +\theta _1\). Then, under the new coordinate, directions \(e_1\) and \(e_2\) become \((\cos (\theta _1+\pi /2-\theta ),\sin (\theta _1+\pi /2-\theta ))\) and \((\cos (\theta _2+\pi /2-\theta ),\sin (\theta _2+\pi /2-\theta ))\) where \(0<\theta _1+\pi /2-\theta<\theta _2+\pi /2-\theta <\pi \). Since \(\sin \theta \) is increasing in \([0,\pi /2]\) and decreasing in \([\pi /2,\pi ]\), one has that
and
By continuity and for any \(0<\theta _2-\theta _1<\pi \), there is \(\theta ^*\in (\theta _2-\pi /2,\theta _1+\pi /2)\) such that
On the other hand, by the proof of Corollary 1.5, there is \(0<\alpha _1<\pi \) small enough such that for \(0<\pi -(\theta _2-\theta _1)<\alpha _1\), it holds
Now, under the new coordinate \((X,Y)=(x\cos \theta ^* +y\sin \theta ^*,-x\sin \theta ^*+y\cos \theta ^*)\), one can construct a curve \(Y=\psi (X)\) with \(x\cos \theta _1 +y\sin \theta _1=0\) and \(x\cos \theta _2+y\sin \theta _2=0\) (the half parts such that \(Y\ge 0\)) being its asymptotic lines and define normals e(X) for the curve \(Y=\psi (\varrho X)/\varrho \). Then, define a function
By following similar arguments of Lemma 2.8, Theorem 1.2 and Corollary 1.5, one can prove that \(U^+(t,X,Y)\) is a supersolution and there is an entire solution V(t, x, y) of (1.1) satisfying (1.11) for all \(\alpha _1\) small enough. By taking \(\rho =\cos (\pi -\alpha _1)-1\) and \(e_0=(\cos \theta ^*,\sin \theta ^*)\), the conclusion of Corollary 1.6 immediately follows.
Now, we show that condition (1.8) without \(g'(\alpha )<0\) and \(g'(\beta )>0\) is necessary for the existence of the curved front in Theorem 1.2.
Proof of Theorem1.7
We first prove that
Assume by contradiction that \(c_{\alpha }/\sin \alpha \ne c_{\beta }/\sin \beta \). Take a sequence \(\{t_n\}_{n\in \mathbb {N}}\) such that \(t_n\rightarrow +\infty \). Then, for the sequence
one has that \(x_n^2+(y_n-c_{\alpha \beta }t_n)^2\rightarrow +\infty \) as \(n\rightarrow +\infty \) for any \(c_{\alpha \beta }\in \mathbb {R}\) since \(c_{\alpha }/\sin \alpha \ne c_{\beta }/\sin \beta \). Notice that for any n, there are \(k^1_n\), \(k^2_n\in \mathbb {Z}\) and \(x'_n\), \(y'_n\in [0,L_2)\) such that \(x_n=k^1_n L_1+x'_n\) and \(y_n=k^2_n L_2+y'_n\). Moreover, up to extract subsequences of \(x_n\) and \(y_n\), there are \(x'_*\in [0,L_1]\) and \(y'_*\in [0,L_2]\) such that \(x_n'\rightarrow x'_*\) and \(y'_n\rightarrow y'_*\) as \(n\rightarrow +\infty \). Since \(f(x,y,\cdot )\) is L-periodic in (x, y), one has \(f(x+x_n,y+y_n,\cdot )\rightarrow f(x+x'_*,y+y'_*,\cdot )\) as \(n\rightarrow +\infty \). Let \(v_n(t,x,y)=V(t+t_n,x+x_n,y+y_n)\). By standard parabolic estimates, \(v_n(t,x,y)\), up to extract of a subsequence, converges to a solution \(v_{\infty }(t,x,y)\) of
By definitions of \(x_n\) and \(y_n\), one can also have that
where
Moreover, by (1.9) and \(x_n^2+(y_n-c_{\alpha \beta } t_n)^2\rightarrow +\infty \) as \(n\rightarrow +\infty \), one gets that
It implies that \(v_{\infty }(t,x,y)=\hat{U}^-_{\alpha \beta }(t,x,y)\) which is impossible since \(\hat{U}^-_{\alpha \beta }(t,x,y)\) is not a solution of (2.48). Therefore, (2.47) holds.
Then, we prove that
Assume by contradiction that \(c_{\alpha \beta }\ne c_{\alpha }/\sin \alpha \). Take a sequence \((t_n)_{n\in \mathbb {N}}\) such that \(t_n=L_2 n\sin \alpha /c_{\alpha } \rightarrow +\infty \) and consider the sequence
Notice that \(x_n^2+(y_n-c_{\alpha \beta }t_n)^2\rightarrow +\infty \) as \(n\rightarrow +\infty \) since \(c_{\alpha \beta }\ne c_{\alpha }/\sin \alpha \), \(t_nc_{\alpha }/\sin \alpha =nL_2\) and \(U^-_{\alpha \beta }(t+t_n,x+x_n,y+y_n)=U^-_{\alpha \beta }(t,x,y)\). Then, one can make the similar arguments as above to get a contradiction. Thus, (2.49) holds.
At last, we prove that
Assume by contradiction that there is \(\theta \in (\alpha ,\beta )\) such that \(c_{\theta }/\sin \theta \ge c_{\alpha \beta }\). Then, two cases may occur: (i) \(c_{\theta }/\sin \theta > c_{\alpha \beta }\); (ii) \(c_{\theta }/\sin \theta = c_{\alpha \beta }\).
For case (i), take \(t=0\) and by (1.9), for any \(\varepsilon >0\), there is \(R_{\varepsilon }>0\) such that
We claim that
Claim 2.10
There exist constants \(\tau \in \mathbb {R}\) and \(\delta >0\) such that
In order to not lengthen the proof, we postpone the proof of this claim after the proof of Theorem 1.7. Take a sequences \((t_n)_{n\in \mathbb {N}}\) such that \(t_n\rightarrow +\infty \) as \(n\rightarrow +\infty \) and \(y_n=c_{\alpha \beta } t_n +R\) where R is a constant. Then, since \(U_e(+\infty ,x,y)=0\) for all \(e\in \mathbb {S}\) and \((x,y)\in \mathbb {T}^2\), one can take R large enough such that
By (1.9) and even if it means increasing R, one has that
However, since \(c_{\theta }/\sin \theta >c_{\alpha \beta }\) and hence,
it follows from Claim 2.10 that
which contradicts (2.51). Case (i) is ruled out.
Now we consider case (ii). Since \(U_e(-\infty ,x,y)=1\) and \(U_e(+\infty ,x,y)=0\) for any \((x,y)\in \mathbb {T}^2\) and \(e\in \mathbb {S}\), there is \(C>0\) such that
and
where \(\sigma \) is defined in (F3). By (1.9), there is \(R>0\) such that
where
and
By a similar proof as of Lemma 2.5, there is \(0<\sigma '\le \sigma \) such that
and
For any \(\tau \in \mathbb {R}\), let \(u_{\tau }(t,x,y)=U_{\theta }(x\cos \theta +y\sin \theta -c_{\theta } t+\tau ,x,y)\). Let
and
Since \(\alpha<\theta <\beta \) and \(c_{\theta }/\sin \theta =c_{\alpha }/\sin \alpha =c_{\beta }/\sin \beta \), one can easily check that
Then, by (1.9), \(U_e(-\infty ,x,y)=1\) and \(U_e(+\infty ,x,y)=0\), there is \(\tau _1\ge c_{\alpha }R+C\) large enough such that for any \(\tau \ge \tau _1\),
and
Moreover, since \(\tau \ge \tau _1\ge c_{\alpha }R+C\), one has that
Thus, it follows that
Also notice that
and f(x, y, u) is nonincreasing in \(u\in (-\infty ,\sigma ]\) and \(u\in [1-\sigma ,+\infty )\) for any \((x,y)\in \mathbb {T}^2\) by (1.2). By following similar proof as the proof of [3, Lemma 4.2] which mainly applied the sliding method and the linear parabolic estimates, one can get that
Combined with (2.52), one has that
Let
By above arguments, one knows that \(\tau _*<+\infty \). On the other hand, for any fixed (t, x, y), \(u_{\tau }(t,x,y)=U_{\theta }(x\cos \theta +y \sin \theta -c_{\theta } t +\tau ,x,y)\rightarrow 1\) as \(\tau \rightarrow -\infty \) and \(V(t,x,y)<1\) by the maximum principle. By the definition of \(\tau _*\), one also has that \(\tau _*>-\infty \). Thus, \(|\tau _*|\) is bounded. If
there is \(\eta >0\) such that
Then, one can follow the above arguments again to get that
which contradicts the definition of \(\tau _*\). Thus,
Since \(V(t,x,y)\ge \sigma '\) in \(\mathbb {R}\times \mathbb {R}^2\setminus (\omega ^-_{\tau _*}\cup \Omega _R^+)\) and \(u_{\tau _*}(t,x,y)=U_{\theta }(x\cos \theta +y\sin \theta -c_{\theta }t+\tau _*,x,y)\rightarrow 0\) as \(x\cos \theta +y\sin \theta -c_{\theta }t\rightarrow +\infty \), there is \(R_1>0\) and there is a sequence \(\{(t_n,x_n,y_n)\}_{n\in \mathbb {N}}\) in \(\mathbb {R}\times \mathbb {R}^2\setminus (\omega ^-_{\tau _*}\cup \Omega _R^+)\) such that
and
Notice that \(x_n\) is bounded. Otherwise, if \(x_n\rightarrow -\infty \) as \(n\rightarrow +\infty \), then it follows from (2.53) and \(\theta >\alpha \) that
and \(x_n^2+(y_n-c_{\alpha \beta } t_n)^2\rightarrow +\infty \) as \(n\rightarrow +\infty \). It implies that \(V(t_n,x_n,y_n)\rightarrow U^-_{\alpha \beta }(t_n,x_n,y_n)\rightarrow 1\) as \(n\rightarrow +\infty \) which contradicts \(u_{\tau _*}(t,x,y)\le 1-\sigma '\) in \(\mathbb {R}\times \mathbb {R}^2\setminus \omega ^-_{\tau _*}\) and (2.54). Similarly, it is not possible that \(x_n\rightarrow +\infty \) as \(n\rightarrow +\infty \). Thus, there is \(x_*\in \mathbb {R}\) such that \(x_n\rightarrow x_*\) as \(n\rightarrow +\infty \). Let \(w(t,x,y)=V(t,x,y)-u_{\tau _*}(t,x,y)\). Then, by (2.54), \(w(t_n,x_n,y_n)\rightarrow 0\) as \(n\rightarrow +\infty \). Consider the point \((t_n-1,x_n-R',y_n-c_{\theta }/\sin \theta +R'\cos \theta /\sin \theta )\) for some constant \(R'\). Notice that by (2.53),
and
for any n. By taking \(R'\) large enough, one can let
Then, by noticing that \((t_n-1,x_n-R,y_n-c_{\theta }+R\cos \theta /\sin \theta )\) satisfies (2.53) and hence \(u_{\tau _*}(t_n-1,x_n-R,y_n-c_{\theta }+R\cos \theta /\sin \theta )\le 1-\sigma '\), one has that
However, since V(t, x, y) and \(u_{\tau _*}(t,x,y)\) are solutions of (1.1), we have that w(t, x, y) satisfies
where b(x, y) is bounded. By the linear parabolic estimates, one can get that
which contradicts (2.55). Therefore, case (ii) is ruled out.
In conclusion, \(c_{\theta }/\sin \theta <c_{\alpha \beta }\) for any \(\theta \in (\alpha ,\beta )\).
We finish this section by proving Claim 2.10.
Proof of Claim 2.10
Take \(\delta >0\) such that
where \(\sigma \) and \(\lambda \) are defined in (F3). Since \(U_{\theta }(-\infty ,x,y)=1\) and \(U_{\theta }(+\infty ,x,y)=0\) for \((x,y)\in \mathbb {T}^2\), there is \(C>0\) such that
From Lemma 2.5, there is \(k>0\) such that \(-\partial _{\xi }U_{\theta }(\xi ,x,y)\ge k\) for \(-C\le \xi \le C\) and \((x,y)\in \mathbb {T}^2\). Take \(\omega >0\) such that
where \(M=\max _{(x,y,u)\in \mathbb {T}^2\times \mathbb {R}} |f_u(x,y,u)|\). It follows from (2.50) and the definition of \(U^-_{\alpha \beta }\) that there is \(R_{\delta }>0\) such that
where
Define
where
and \(\hat{R}_{\delta }=R_{\delta } \sin \theta \max \{1/\sin \alpha ,1/\sin \beta \}\). We prove that \(v^-(t,x,y)\) is a subsolution of the problem satisfied by V(t, x, y) for \(t\ge 0\) and \((x,y)\in \mathbb {R}^2\).
Firstly, we check the initial data. Since \(\alpha<\theta <\beta \), one has that
Then,
For \((x,y)\in \mathbb {R}^2\) such that \(\xi (0,x,y)\ge C\), one has that
Thus, \(v^-(0,x,y)\le V(0,x,y)\) for all \((x,y)\in \mathbb {R}^2\).
We then check that
By some computation and (2.2), one has that
For \(t\ge 0\) and \((x,y)\in \mathbb {R}^2\) such that \(\xi (t,x,y)\ge C\), one has that \(0<U_{\theta }(\xi (t,x,y),x,y)\le \delta \) and hence \(v^-(t,x,y)\le 2\delta \le \sigma \). Thus, by (1.2), it follows that
Since \(\partial _{\xi } U_{\theta }<0\), it follows from (2.57) and (2.58) that
Similarly, one can prove that \(Nv\le 0\) for \(t\ge 0\) and \((x,y)\in \mathbb {R}^2\) such that \(\xi (t,x,y)\le -C\). Finally, for \(t\ge 0\) and \((x,y)\in \mathbb {R}^2\) such that \(-C\le \xi (t,x,y)\le C\), one has that \(-\partial _{\xi }U_{\theta }(\xi (t,x,y),x,y)\ge k\) and
where \(M=\max _{(x,y,u)\in \mathbb {T}^2\times \mathbb {R}} |f_u(x,y,u)|\). Then, it follows from (2.56), (2.57) and (2.59) that
By the comparison principle, one gets that
Then, the conclusion of Claim 2.10 follows immediately.
3 Uniqueness and Stability of the Curved Front
This section is devoted to the proofs of uniqueness and stability of the curved front in Theorem 1.2, that is, Theorems 1.8 and 1.9.
3.1 Proof of Theorem 1.8
The idea of the proof of the uniqueness is inspired by Berestycki and Hamel [3] who proved that for any two almost-planar fronts \(u_1(t,x,y)\) and \(u_2(t,x,y)\), there is \(T\in \mathbb {R}\) such that either \(u_1(t+T,x,y)>u_2(t,x,y)\) or \(u_1(t+T,x,y)=u_2(t,x,y)\).
Proof of Theorem 1.8
Assume that there is another curved front \(V^*(t,x,y)\) satisfying (1.9). By (1.9), there is \(R>0\) large enough such that
where \(\sigma \) is defined in (F3),
and
Since \(c_{\alpha }/\sin \alpha =c_{\beta }/\sin \beta \), one knows that \(\omega _t^+\) and \(\omega _t^-\) are connected. By a similar proof as of Lemma 2.5, there is \(0<\sigma '\le \sigma \) such that
Then, by taking \(\tau \) large enough, one has
and
Since
This means that
Since f(x, y, u) is nonincreasing in \(u\in (-\infty ,\sigma ]\) and \(u\in [1-\sigma ,+\infty )\) for \((x,y)\in \mathbb {T}^2\) and by the same line of the proof of [3, Lemma 4.2], one can get that
and hence,
Now, we decrease \(\tau \) and let
Since both V(t, x, y) and \(V^*(t,x,y)\) satisfy (1.9), one knows that \(\tau _*\ge 0\). Assume that \(\tau _*>0\). If
then there is \(\eta >0\) such that
By applying above arguments again, one can get that
which contradicts the definition of \(\tau _*\). Thus,
and there is a sequence \(\{(t_n,x_n,y_n)\}_{n\in \mathbb {N}}\) such that
Then, by following similar arguments as Step 3 of the proof of Lemma 2.8, one can get a contradiction. Thus, \(\tau _*=0\).
Therefore,
The same arguments can be applied by changing positions of V(t, x, y) and \(V^*(t,x,y)\), and then, we can get that
In conclusion, \(V^*(t,x,y)\equiv V(t,x,y)\).
3.2 Stability of the Curved Front
Take any \(0<\alpha<\beta <\pi \) such that Theorem 1.2 holds. Since \(g'(\alpha )<0\), one can take \(\alpha _1\in (0,\alpha )\) such that
Similar as Lemma 2.2, there is a smooth function \(\varphi _1(x)\) with \(y=-x\cot \alpha \) and \(y=-x\cot \alpha _1\) being its asymptotic lines and there are positive constant \(k_3\), \(k_4\) and \(K_4\) such that
Take a constant \(\varrho \) which will be determined later. For every point (x, y) on the curve \(y=\varphi _1(\varrho x)/\varrho \), there is a unit normal
For \((x,y)\in \mathbb {R}^2\) and \(t\in \mathbb {R}\), take a constant \(\varepsilon \) and we define
where
Lemma 3.1
There exist \(\varepsilon _0\) and \(\varrho (\varepsilon _0)\) such that for any \(0<\varepsilon \le \varepsilon _0\) and \(0<\varrho \le \varrho (\varepsilon _0)\), the function \(U_1^-(t,x,y)\) is a subsolution of (1.1). Moreover, this satisfies
and
Proof
Assume that
where \(\sigma >0\) is defined in (F3). More restrictions on \(\varepsilon _0\) will be given later. It follows from similar computation as Step 1 of the proof of Lemma 2.8 that
where \(U_{e(x)}\), \(\partial _{\xi }U_{e(x)}\), \(\partial _{\xi \xi } U_{e(x)}\), \(\nabla _{x,y}\partial _{\xi } U_{e(x)}\), \(\Delta _{x,y}U_{e(x)}\), \(U''_{e(x)}\cdot e'(x)\cdot e'(x)\), \(U'_{e(x)}\cdot e''(x)\), \(\partial _{\xi }U'(e(x))\cdot e'(x)\), \(\partial _x U'_{e(x)}\cdot e'(x)\) are taking values at \((\underline{\xi }(t,x,y),x,y)\) and \(U_1^-\), \(\underline{\xi }_t\), \(\underline{\xi }_x\), \(\underline{\xi }_y\) are taking values at (t, x, y). Similar as (2.20), (2.21) in the proof of Lemma 2.8, there are \(C_5>0\) and \(C_6>0\) such that
and
By a similar proof as of Claim 2.9, we can easily get that
and there is \(C_7>0\) such that
Since \(\varphi _1'(x)(\varrho x)\rightarrow -\cot \alpha _1\), \(e(x)\rightarrow (\cos \alpha _1,\sin \alpha _1)\) as \(x\rightarrow +\infty \) and \(c_{\alpha _1}/\sin \alpha _1>c_{\alpha }/\sin \alpha \), there is a constant \(c>0\) such that
For \(x<0\), one can make similar arguments as in the proof of Lemma 2.8 to get that \(NU^-_1\le 0\). For \(x\ge 0\), one can get from (3.5), (3.6), (3.7) and Lemma 2.1 that
For \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(\underline{\xi }(t,x,y)\ge C\) and \(\underline{\xi }(t,x,y)\le -C\) where C is defined by (2.24), it follows from (F3) and \(\varepsilon \le \varepsilon _0\le \sigma /2\) that
Since \(\partial _{\xi } U_e<0\), one has that
by taking \(\varrho (\varepsilon )>0\) small enough such that
and \(0<\varrho \le \varrho (\varepsilon )\). Finally, for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(-C\le \underline{\xi }(t,x,y)\le C\), there is \(k>0\) such that
Notice that
where \(M:=\max _{(x,y,u)\in \mathbb {T}^2\times \mathbb {R}} |f_u(x,y,u)|\). Thus, it follows from (3.8) and (3.9) that
by taking \(\varepsilon _0=\min \{\sigma /2, k c/(\lambda +M)\}\) and \(0<\varepsilon \le \varepsilon _0\).
By similar arguments as to those in Step 2 of the proof of Lemma 2.8, one gets that (3.3) holds. The inequality (3.4) can be gotten by comparing \(U_1^-(t,x,y)\) with \(U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t,x,y)\) through similar arguments as in Step 3 of the proof of Lemma 2.8. This completes the proof.
Similarly, since \(g'(\beta )>0\), one can take \(\beta _1\in (\beta ,\pi )\) such that
Similarly to as Lemma 2.2, there is a smooth function \(\varphi _2(x)\) with \(y=-x\cot \beta \) and \(y=-x\cot \beta _1\) being its asymptotic lines and there are positive constant \(k_5\), \(k_6\) and \(K_5\) such that
Take a constant \(\varrho \) which will be determined later. For every point (x, y) on the curve \(y=\varphi _2(\varrho x)/\varrho \), there is a unit normal
For \((x,y)\in \mathbb {R}^2\) and \(t\in \mathbb {R}\), take a constant \(\varepsilon \) and we define
where
Similarly to Lemma 3.1, we can prove the following lemma:
Lemma 3.2
There exist \(\varepsilon _0\) and \(\varrho (\varepsilon _0)\) such that for any \(0<\varepsilon \le \varepsilon _0\) and \(0<\varrho \le \varrho (\varepsilon _0)\), the function \(U_2^-(t,x,y)\) is a subsolution of (1.1). Moreover, this satisfies
and
Then, we need the following sub and supersolutions for the Cauchy problems of (1.1):
Lemma 3.3
For any function \(u(t,x,y)\in C^{1,2}(\mathbb {R}\times \mathbb {R}^2)\), if it is a subsolution of (1.1) for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) with \(u_t>0\) and for any \(0<\sigma _1<1/2\) there is a positive constant k such that
then for any \(0<\delta <\sigma /2\) where \(\sigma \) is defined in (F3), there exist positive constants \(\omega \) and \(\lambda \) such that
is a subsolution of (1.1) for \(t\ge 0\) and \((x,y)\in \mathbb {R}^2\). Similarly, if u(t, x, y) is a smooth supersolution satisfying (3.12), then for any \(0<\delta <\sigma /2\), there exist positive constants \(\omega \) and \(\lambda \) such that
is a supersolution of (1.1) for \(t\ge 0\) and \((x,y)\in \mathbb {R}^2\).
Proof
We only prove for the subsolution. Similar arguments can be applied for the supersolution. Take any \(0<\delta <\sigma /2\) where \(\sigma \) is defined in (F3). Let \(k>0\) such that \(u_t\ge k\) for \((t,x,y)\in \mathbb {R}\times \mathbb {R}^2\) such that \(\sigma /2\le u\le 1-\sigma /2\). Take \(\omega >0\) such that
where \(\lambda \) is defined in (F3) and \(M:=\max _{(x,y,u)\in \mathbb {T}^2\times \mathbb {R}} |f_u(x,y,u)|\).
We then check that
By computation, one can get that
For \(t> 0\) and \((x,y)\in \mathbb {R}^2\) such that \(1-\sigma /2 \le u(t+\omega \delta e^{-\lambda t} -\omega \delta ,x,y)\le 1\) and \(0\le u(t+\omega \delta e^{-\lambda t} -\omega \delta ,x,y)\le \sigma /2\) respectively, one has that \( \underline{u}(t,x,y)\ge 1-\sigma \) and \(\underline{u}(t,x,y)\le \sigma \) respectively. Then, by (1.2), it follows that
Thus, by \(u_t>0\), we have
For \(t> 0\) and \((x,y)\in \mathbb {R}^2\) such that \(\delta /2 \le u(t+\omega \delta e^{-\lambda t},x,y)\le 1-\sigma /2\), one has that
by the definition of \(\omega \).
This completes the proof.
Now, we are ready to prove the stability of the curved front of Theorem 1.2.
Proof of Theorem 1.9
Take any \(\delta \in (0,\sigma /2]\). Take \(\varepsilon _0\le \delta /4\) and \(\varrho (\varepsilon _0)\) such that Lemmas 2.8, 3.1 and 3.2 hold for any \(\varepsilon \in (0,\varepsilon _0]\) and \(\varrho \in (0,\varrho (\varepsilon _0)]\). Pick any \(\varepsilon \in (0,\varepsilon _0]\). Let \(U^+(t,x,y)\), \(U_1^-(t,x,y)\) and \(U_2^-(t,x,y)\) be defined by (2.14), (3.2) and (3.11) respectively. Let \(U^-_{12}(t,x,y)=\max \{U_1^-(t,x,y), U^-_2(t,x,y)\}\). Then, by Lemmas 3.1, 3.2 and similar arguments as Step 2 of the proof of Lemma 2.8, one can get that
and
By (1.12), there is \(R_{\delta }>0\) such that
By the definition of \(\psi (x)\) from Lemma 2.2, one has that
which implies \(U_{e(x)}(\xi (0,x,y),x,y)\rightarrow 1\) as \(\varrho \rightarrow 0\) for \(x^2+y^2\le R_{\delta }^2\), where e(x) is defined by (2.12). Then, take \(\varrho \in (0,\varrho (\varepsilon _0)]\) small enough such that
Similarly, since \(\varphi _1(0)<0\) and \(\varphi _2(0)<0\), one can take a \(\varrho \in (0,\varrho (\varepsilon _0)]\) such that
for \((x,y)\in \mathbb {R}^2\) such that \(x^2+y^2\le R_{\delta }^2\). Define
and
where \(\omega \), \(\delta \) and \(\lambda \) are defined in Lemma 3.3. It follows from (2.17) and (3.13) that
Together with (3.15) and (3.16), one has that
On the other hand, by Lemma 2.5, one knows that \(U_1^-(t,x,y)\), \(U^-_2(t,x,y)\) and \(U^+(t,x,y)\) satisfy (3.12). By Lemma 3.3 and the comparison principle, one can get that
Take a sequence \(t_n=L_2n/c_{\alpha \beta }\) where \(L_2\) is the period of y. Then, \(t_n\rightarrow +\infty \) as \(n\rightarrow +\infty \). By parabolic estimates, the sequence \(u_n(t,x,y):=u(t+t_n,x,y+L_2 n)\) converges, locally uniformly in \(\mathbb {R}\times \mathbb {R}^2\), to a solution \(u_{\infty }(t,x,y)\) of (1.1). Since \(U_1^-(t+t_n,x,y+L_2 n)=U_1^-(t,x,y)\), \(U_2^-(t+t_n,x,y+L_2 n)=U_2^-(t,x,y)\) and \(U^+(t+t_n,x,y+L_2 n)=U^+(t,x,y)\), one has that
and by passing to the limit \(n\rightarrow +\infty \), \(u_{\infty }(t,x,y)\) satisfies
Let \(u(t+t_0,x,y;u_0(x,y))\) denote the solution of the initial value problem
Then, by the comparison principle, one can get that
for \(t\ge t_0\) and \((x,y)\in \mathbb {R}^2\). By uniqueness of the curved front, one can easily prove that
Similarly,
Thus, for any fixed t and any \(t_0<t\),
By passing to the limit \(t_0\rightarrow -\infty \), then one has that
Since \(\delta \) can be taken arbitrary small, we have that \(u_{\infty }(t,x,y)\equiv V(t,x,y)\). Thus, for any \(\eta >0\), it follows from (1.9), (3.14), (3.17), Lemma 2.8 and taking \(\delta \) small enough that there is \(t_0>0\) large enough such that
Then, by \(V_t>0\) and a similar proof as of Lemma 2.5, one knows that V(t, x, y) satisfies (3.12). By Lemma 3.3 again and the comparison principle, one gets that
for \(t\ge 0\) and \((x,y)\in \mathbb {R}^2\). Then, since \(\eta \) can be arbitrary small, one finally has that
This completes the proof.
4 A Curved Front with Varying Interfaces
In this section, we construct a curved front with varying interfaces. It behaves as three pulsating fronts as \(t\rightarrow -\infty \) and as two pulsating fronts as \(t\rightarrow +\infty \). We can not apply the idea of Hamel [17] by considering a Neumann boundary problem in the half plane \(x<0\) since our problem is not orthogonal symmetric with respect to y-axis in general.
Let \(\alpha \), \(\beta \) and \(\theta \) satisfy Theorem 1.10. We will need the following properties:
Lemma 4.1
It holds that
and
with \(c_1>0\) and \(\hat{c}_1<0\). Moreover,
and
Proof
Assume by contradiction that \(c_{\alpha \theta }e_{\alpha \theta }\ne (c_1,c_2)\). Take a sequence \(\{t_n\}_{n\in \mathbb {N}}\) such that \(t_n\rightarrow +\infty \). Then, for the sequence
one has that \(((x_n,y_n)-c_{\alpha \theta }e_{\alpha \theta }t_n)^2\rightarrow +\infty \) as \(n\rightarrow +\infty \) since \(c_{\alpha \theta }e_{\alpha \theta }\ne (c_1,c_2)\). Notice that for any n, there are \(k^1_n\), \(k^2_n\in \mathbb {Z}\) and \(x'_n\in [0,L_1]\), \(y'_n\in [0,L_2)\) such that \(x_n=k^1_n L_1+x'_n\) and \(y_n=k^2_n L_2+y'_n\). Moreover, up to extract subsequences of \(x_n\) and \(y_n\), there are \(x'_*\in [0,L_1]\) and \(y'_*\in [0,L_2]\) such that \(x_n'\rightarrow x'_*\) and \(y'_n\rightarrow y'_*\) as \(n\rightarrow +\infty \). Since \(f(x,y,\cdot )\) is L-periodic in (x, y), one has \(f(x+x_n,y+y_n,\cdot )\rightarrow f(x+x'_*,y+y'_*,\cdot )\) as \(n\rightarrow +\infty \). Let \(v_n(t,x,y)=V_{\alpha \theta }(t+t_n,x+x_n,y+y_n)\). By standard parabolic estimates, \(v_n(t,x,y)\), up to extract of a subsequence, converges to a solution \(v_{\infty }(t,x,y)\) of
By definitions of \(x_n\), \(y_n\), \(c_1\) and \(c_2\), one can also have that
where
Moreover, since \(V_{\alpha \theta }(t,x,y)\) satisfies
one then gets that
This implies that \(v_{\infty }(t,x,y)=\hat{U}^-_{\alpha \theta }(t,x,y)\) which is impossible since \(\hat{U}^-_{\alpha \theta }(t,x,y)\) is not a solution of (4.1). Thus, \(c_{\alpha \theta }e_{\alpha \theta }= (c_1,c_2)\). Similarly, one can prove that \(c_{\beta \theta }e_{\beta \theta }=(\hat{c}_1,\hat{c}_2)\).
The signs of \(c_1\) and \(\hat{c}_1\) can be easily gotten from the facts \(\alpha<\theta <\beta \) and \(c_{\alpha }/\sin \alpha =c_{\beta }/\sin \beta >c_{\theta }/\sin \theta \).
Notice that the speed of the pulsating front \(U_{\theta _1}(x\cos \theta _1+y\sin \theta _1-c_{\theta _1}t,x,y)\) in direction \(e_{\alpha \theta }\) can be denoted by
By similar arguments as to those of Theorem 1.7, one has that
This completes the proof.
Let \(\varphi _1(x)\) be a smooth function such that there exist \(a_1<0<b_1\) such that
Let \(\varphi _2(x)\) be a smooth function such that there exist \(a_2<0<b_2\) such that
Let
and
By \(c_1>0\), \(\hat{c}_1<0\) and making \(|a_1|\), \(|a_2|\), \(b_1\), \(b_2\) large enough and \(\rho \) small enough, one can let \((\psi _1)_{xx}>0\) for t negative enough and \(x\le (c_1+\hat{c}_1)t/2\) and \((\psi _2)_{xx}>0\) for t negative enough and \(x\ge (c_1+\hat{c}_1)t/2\). Let
Take a constant \(\varrho \) to be determined. For every point on the curve \(y=\psi _1(\varrho t,\varrho x)\), there is a unit normal
For every point on the curve \(y=\psi _2(\varrho t,\varrho x)\), there is a unit normal
Take \(\varepsilon >0\) to be determined. For \(t\in \mathbb {R}\) and \((x,y)\in \mathbb {R}^2\), define
where
By the definition of \(\psi _1\), \(\psi _2\), \(c_1\), \(c_2\), \(\hat{c}_1\) and \(\hat{c}_2\), one can easily check that around \(x=(c_1+\hat{c}_1)t/2\),
for t negative enough. Thus, \(\widetilde{U}^+(t,x,y)\) is smooth for t negative enough and \((x,y)\in \mathbb {R}^2\).
Lemma 4.2
There exist \(\varepsilon _0\) and \(\varrho (\varepsilon _0)\) such that for any \(0<\varepsilon \le \varepsilon _0\) and \(0<\varrho \le \varrho (\varepsilon _0)\), the function \(\widetilde{U}^+(t,x,y)\) is a supersolution of (1.1) for t negative enough. Moreover, this satisfies
and
Proof
We only prove for the part \(x\le (c_1+\hat{c}_1)t/2\). Take \(0<\varepsilon _0\le \sigma /2\) and more restrictions on \(\varepsilon _0\) will be given later. Change variables \(X=x-c_1 t\) and \(Y=y-c_2 t\). Then,
and
One can compute that
This means that there exists a positive constant C such that the \(L^{\infty }\) norms of above derivatives of \(\psi _1(t,X)\) are bounded by \(C(\text {sech}(X)+\text {sech}(X+(c_1-\hat{c}_1)t))\). One can also compute that
and
where \((\psi _1)_X\), \((\psi _1)_{XX}\), \((\psi _1)_{XXX}\), \((\psi _1)_{tX}\) are taking values at \((\varrho t,\varrho X)\) in \(e_t\), \(e_X\), \(e_{XX}\). Let
where
We need to verify that
for t negative enough and \((x,y)\in \mathbb {R}^2\). By (2.2) and after some computation, one can get that
where \(\partial _{\xi } U_{e(t,X)}\), \(\partial _{\xi \xi } U_{e(t,X)}\), \(\nabla _{X,Y}\partial _{\xi } U_{e(t,X)}\), \( U'_{e(t,X)}\cdot e_t\), \(U''_{e(t,X)}\cdot e_X\cdot e_X\), \(U'_{e(t,X)}\cdot e_{XX}\), \(\partial _{\xi } U'_{e(t,X)}\cdot e_{X}\), \(\partial _{X} U'_{e(t,X)}\cdot e_{X}\), \(U'_{e(t,X)}\cdot e_{X}\), \(U_{e(t,X)}\) are taking values at \((\xi _1(t,X,Y),X,Y)\) and \(\widetilde{U}^+\), \((\xi _1)_t\), \((\xi _1)_X\), \((\xi _1)_Y\) are taking values at (t, X, Y). Similarly to the as those formulas of (2.18), one can also compute that
where \((\psi _1)_X\), \((\psi _1)_t\) \((\psi _1)_{XX}\), \((\psi _1)_{tX}\) are taking values at \((\varrho t,\varrho X)\). By Lemma 2.1, Lemma 2.4, Lemma 2.7, boundedness of \(\Vert U'_e\Vert \), \(\Vert U''_e\Vert \), \(\Vert \partial _{\xi }U'_e\Vert \), \(\Vert \partial _{x}U'_e\Vert \) and above formulas, there are constants \(C_8>0\) and \(C_9>0\) such that
and
Therefore, it follows that
We claim that
Claim 4.3
There exist positive constants \(C_{10}\) and \(C_{11}\) such that
In order to not lengthen the proof, we postpone the proof of Claim 4.3 after the proof of this lemma.
For \(\xi _1(t,X,Y)\ge C\) and \(\xi _1(t,X,Y)\le -C\) where C is defined by (2.24), it follows from (1.2) that
Then, by \(\partial _{\xi } U_e<0\), Lemma 2.4 and Claim 4.3, it follows that
where \(B_1=\sup _{e\in \mathbb {S}} \Vert \partial _{\xi } U_e \xi _1\Vert _{L^{\infty }}\) and \(B_2=\sup _{e\in \mathbb {S}} \Vert \partial _{\xi } U_e\Vert _{L^{\infty }}\), by taking \(0<\varrho \le \varrho (\varepsilon )\) where \(\varrho (\varepsilon )\) is small enough such that
For \(-C\le \xi _1(t,x,y)\le C\), there is \(k>0\) such that \(-\partial _{\xi }U_{e(t,x)}(\xi _1(t,x,y),x,y)\ge k\). Then, it follows from Claim 4.3 that
where \(M=\max _{(x,y,u)\in \mathbb {R}^2\times \mathbb {R}} |f_u(x,y,u)|\), by (4.7), taking \(0<\varepsilon \le \varepsilon _0\) and \(\varepsilon _0=\max \{\sigma /2,kC_{11}/(\lambda +M)\}\).
By the comparison principle, \(\widetilde{U}^+(t,x,y)\) is a supersolution of (1.1).
By the definition of \(\psi _1(x)\), \(\psi _2(x)\) and Lemma 4.1, one has that
and
Then, by similar arguments as in Step 2 of the proof of Lemma 2.8, one can get (4.3) and (4.4). The inequality (4.5) can be gotten by comparing \(\widetilde{U}^+(t,x,y)\) with \(U_{\alpha }(x\cos \alpha +y\sin \alpha -c_{\alpha }t,x,y)\), \(U_{\beta }(x\cos \beta +y\sin \beta -c_{\beta }t,x,y)\), \(U_{\theta }(x\cos \theta +y\sin \theta -c_{\theta }t,x,y)\) respectively for t negative enough through similar arguments as in Step 3 of the proof of Lemma 2.8. This completes the proof.
We then prove Claim 4.3.
Proof of Claim 4.3
From (4.6), one has that
Then, by Lemma 2.1 and the definition of \(\psi _1\), there is \(C_{10}>0\) such that
and
Let \(\theta (t,X)=\arccos (e_1(t,X))\). Then, \(e(t,X)=(\cos \theta (t,X),\sin \theta (t,X))\). By the definition of \(\psi _1(t,X)\), one has \(\alpha<\theta (t,X)<\theta \). It follows from Lemma 4.1 that
Notice that \(c_e>0\) for all \(e\in \mathbb {S}\). By Lemma 4.1, one has that
Let
Notice that \(h(\alpha )=c_{\alpha \theta }\). Also notice that \(e_1(t,X)\rightarrow \cos \alpha \) as \(X\rightarrow -\infty \) and \(\theta (t,X)\rightarrow \alpha \) as \(X\rightarrow -\infty \) for X being very negative. Then, one has that
Remember that \(h'(\alpha )<0\) by the assumptions of Theorem 1.10. Moreover, by the formulas in the proof of Lemma 4.2, there is \(C_{11}>0\) such that
By (4.8)-(4.12), we have our conclusion.
Now, we turn to prove Theorem 1.10.
Proof of Theorem 1.10
Let \(u_n(t,x,y)\) be the solution of (1.1) for \(t\ge -n\) with initial data
where
By Lemma 4.2, it follows from the comparison principle that
wherer T is a negative constant such that Lemma 4.2 holds for \(-\infty <t\le T\). Since \(U^-_{\alpha \theta \beta }(t,x,y)\) is a subsolution, the sequence \(u_n(t,x,y)\) is increasing in n. Letting \(n\rightarrow +\infty \) and by parabolic estimates, the sequence \(u_n(t,x,y)\) converges to an entire solution u(t, x, y) of (1.1).
By (4.13), u(t, x, y) satisfies
Moreover, by (4.3), (4.4) and since \(\varepsilon \) can be arbitrary small, one can get that u(t, x, y) satisfies
and
for t negative enough. Now, we consider the half plane \(H:=\{(x,y)\in \mathbb {R}^2; x<0\}\). Take any sequence \(\{t_n\}_{n\in \mathbb {N}}\) of \(\mathbb {R}\) such that \(t_n\rightarrow -\infty \) as \(n\rightarrow +\infty \). Notice that for any n, there are \(k^1_n\), \(k^2_n\in \mathbb {Z}\) and \(x'_n\in [0,L_1)\), \(y'_n\in [0,L_2)\) such that \(c_1 t_n=k^1_n L_1+x'_n\) and \(c_2 t_n=k^2_n L_2+y'_n\). Moreover, up to extract subsequences of \(c_1 t_n\) and \(c_2 t_n\), there are \(x'_*\in [0,L_1]\) and \(y'_*\in [0,L_2]\) such that \(x_n'\rightarrow x'_*\) and \(y'_n\rightarrow y'_*\) as \(n\rightarrow +\infty \). Let \(v_n(t,x,y)=u(t+t_n,x+c_1 t_n,y+c_2 t_n)\) and \(H_n=H-c_1 t_n\). Then, \(H_n\rightarrow \mathbb {R}^2\) as \(n\rightarrow +\infty \). Since \(f(x,y,\cdot )\) is L-periodic in (x, y), one has that \(f(x+c_1 t_n,y+c_2 t_n,\cdot )\rightarrow f(x+x'_*,y+y'_*,\cdot )\) By parabolic estimates, \(v_n(t,x,y)\), up to extract of a subsequence, converges to a solution \(v_{\infty }(t,x,y)\) of
By the definitions of \(c_1\) and \(c_2\), one can easily check that
where
By (4.15), it follows that
By the uniqueness of the curved front, one then has that \(v_{\infty }(t,x,y)\equiv \hat{V}_{\alpha \theta }(t,x,y)\) where \(\hat{V}_{\alpha \theta }(t,x,y)\) is the curved front of (4.17) satisfying
Thus, for any fixed t,
By (4.15), (4.18) and (4.19), the above convergence is uniform in \(\overline{H_n}\). Thus, for any fixed t,
which implies
By the above arguments applied to \(\hat{V}_{\alpha \theta }(t-t_n+t_0,x-c_1 t_n,y-c_2 t_n)\) for arbitrary \(t_0\in \mathbb {R}\), one can get that
Since \(t_0\) is arbitrary, the above convergence is also uniform for \(t\in \mathbb {R}\). Thus, by (4.20), one gets that
Similarly, one can prove that \(u(t,x,y)\rightarrow V_{\beta \theta }(t,x,y)\) as \(t \rightarrow -\infty \) uniformly in \(\mathbb {R}^2\setminus H\).
On the other hand, for fixed \(T<0\) such that Lemma 4.2 holds, one can easily check that
and
Since \(\varepsilon \) can be arbitrary small and by (4.14), one has that
By stability of the curved front, that is, Theorem 1.9, one has that
This completes the proof of Theorem 1.10.
Finally, we prove Corollary 1.12 which implies that Theorem 1.10 is not empty.
Proof of Corollary 1.12
Assume that \(e_*=(0,1)\). Since \(c_{e_*}=\min _{e\in \mathbb {S}} \{c_e\}\) and \(c'_e\) is bounded, there exist \(\alpha _1\in (0,\pi /2)\) and \(\beta _1\in (\pi /2,\pi )\) such that
and
Let \(g(\theta )=c_{\theta }/\sin \theta \). Then,
One can make \(\alpha _1\), \(\beta _1\) close to \(\pi /2\) such that
Thus, \(g(\theta )\) is decreasing from \(g(\alpha )\) to \(g(\pi /2)\) as \(\theta \) varying from \(\alpha _1\) to \(\pi /2\), and is increasing from \(g(\pi /2)\) to \(g(\beta )\) as \(\theta \) varying from \(\pi /2\) to \(\beta _1\). By continuity, one can pick \(\alpha \in [\alpha _1,\pi /2)\) and \(\beta \in (\pi /2,\beta _1]\) such that
Let \(e_1=(\cos \alpha ,\sin \alpha )\) and \(e_2=(\cos \beta ,\sin \beta )\). By Theorem 1.2, there is a curved front \(V_{e_1 e_2}(t,x,y)\) of (1.1) satisfying (1.11) with \(e_0=e_*\).
By the same arguments of Corollary 1.6, one can rotate the coordinate such that \(e_*\) can be any direction and for \(e_1\), \(e_2\) close to \(e_*\) enough, there is a curved front \(V_{e_1e_2}(t,x,y)\) of (1.1) satisfying (1.11).
Assume that \(e_*\) is denoted by \((\cos \theta _*,\sin \theta _*)\) where \(\theta _*\in (0,\pi /2)\) is small enough. Take \(e_1\), \(e_2\) close to \(e_*\) such that there exists a curved front \(V_{e_1e_2}(t,x,y)\) of (1.1). Let \(e_1\) and \(e_2\) be denoted by \((\cos \theta _1,\sin \theta _1)\) and \(\cos \theta _2,\sin \theta _2\) respectively, where \(\theta _1\) and \(\theta _2\) are close to \(\theta _*\). By Corollary 1.5 and since \(\theta _*\) is small enough which means that \(\theta _1\) is small enough, there is \(\theta _3\in (\pi /2,\pi )\) such that
and there is a curved front \(V_{\theta _1\theta _3}\) of (1.1) satisfying (1.9) with \(\alpha =\theta _1\), \(\beta =\theta _3\) and \(c_{\alpha \beta }=c_{\theta _1\theta _3}\). On the other hand, since \(\theta _1\) is small enough, this implies that \(\theta _3\) is close to \(\pi \) enough. Then, since \(\theta _2\) is also small enough, one has that \(\theta _3-\theta _2\) is close to \(\pi \) enough and hence, \((\cos \theta _2,\sin \theta _2)\cdot (\cos \theta _3,\sin \theta _3)=\cos (\theta _3-\theta _2)\) is close to \(-1\) enough. By Corollary 1.6, there is \(e_{**}\) such that (1.10) holds for \(e_1=(\cos \theta _2,\sin \theta _2)\), \(e_2=(\cos \theta _3,\sin \theta _3)\), \(e_0=e_{**}\) and there is a curved front \(V_{\theta _2\theta _3}\) of (1.1) satisfying (1.11).
Then, by Theorem 1.10, there is an entire solution u(t, x, y) of (1.1) satisfying (1.13) and (1.14) with \(\alpha =\theta _1\), \(\theta =\theta _2\), \(\beta =\theta _3\).
Change history
25 October 2021
A Correction to this paper has been published: https://doi.org/10.1007/s00205-021-01720-w
References
Allen, S.; Cahn, J.W.: A microscopic theory for antiphase boundary motion and its application to antiphase domain coarsening. Acta. Mettall. 27, 1084–1095, 1979
Berestycki, H.; Hamel, F.: Front propagation in periodic excitable media. Commun. Pure Appl. Math. 55, 949–1032, 2002
Berestycki, H.; Hamel, F.: Generalized transition waves and their properties. Commun. Pure Appl. Math. 65, 592–648, 2012
Bu, Z.-H.; Wang, Z.-C.: Curved fronts of monostable reaction-advection-diffusion equations in space-time periodic media. Commun. Pure Appl. Anal. 15, 139–160, 2016
Chen, X.; Guo, J.-S.; Hamel, F.; Ninomiya, H.; Roquejoffre, J.-M.: Traveling waves with paraboloid like interfaces for balanced bistable dynamics. Ann. Inst. H. Poincaré Non Linear Anal. 24, 369–393, 2007
Ding, W.; Giletti, T.: Admissible speeds in spatially periodic bistable reaction-diffusion equations, preprint. (arXiv:2006.05118)
Ding, W.; Hamel, F.; Zhao, X.: Bistable pulsating fronts for reaction-diffusion equations in a periodic habitat. Indiana Univ. Math. J. 66, 1189–1265, 2017
Ducrot, A.: A multi-dimensional bistable nonlinear diffusion equation in a periodic medium. Math. Ann. 366, 783–818, 2016
Ducrot, A.; Giletti, T.; Matano, H.: Existence and convergence to a propagating terrace in one-dimensional reaction-diffusion equations. Trans. Am. Math. Soc. 366, 5541–5566, 2014
Ei Smaily, M.: Curved fronts in a shear flow: case of combustion nonlinearities. Nonlinearity 31, 5643–5663, 2018
El Smaily, M.; Hamel, F.; Huang, R.: Two-dimensional curved fronts in a periodic shear flow, Nonlinear. Analysis 74, 6469–6486, 2011
Fang, J.; Zhao, X.-Q.: Bistable traveling waves for monotone semiflows with applications. J. Eur. Math. Soc. 17, 2243–2288, 2015
Fife, P.C.; McLeod, J.B.: The approach of solutions of nonlinear diffusion equations to traveling front solutions. Arch. Ration. Mech. Anal. 65, 335–361, 1977
Fisher, R.A.: The wave of advance of advantageous genes. Ann. Eugenics 7, 335–369, 1937
Guo, H.: Propagating speeds of bistable transition fronts in spatially periodic media. Calc. Var. Part. Diff. Equ. 57, 47, 2018
Guo, H.; Hamel, F.; Sheng, W.-J.: On the mean speed of bistable transition fronts in unbounded domains. J. Math. Pures Appl. 136, 92–157, 2020
Hamel, F.: Bistable transition fronts in \(\mathbb{R}^N\). Adv. Math. 289, 279–344, 2016
Hamel, F.; Monneau, R.: Solutions of semilinear elliptic equations in \(\mathbb{R}^N\) with conical-shaped level sets. Commun. Part. Diff. Equations 25, 769–819, 2000
Hamel, F.; Monneau, R.; Roquejoffre, J.-M.: Existence and qualitative properties of multidimensional conical bistable fronts. Disc. Cont. Dyn. Syst. A 13, 1069–1096, 2005
Kolmogorov, A.N.; Petrovskii, I.G.; Piskunov, S.N.: Étude de l equation de la diffusion avec croissance de la quantité de matière et son application à un problème biologique. Bull. Univ. État Moscou Ser. Intern. A 1, 1–26, 1937
Ninomiya, H.; Taniguchi, M.: Existence and global stability of traveling curved fronts in the Allen–Cahn equations. J. Diff. Equ. 213, 204–233, 2005
Nolen, J.; Ryzhik, L.: Traveling waves in a one-dimensional heterogeneous medium. Ann. Inst. H. Poincaré Analyse Non Linéaire 26, 1021–1047, 2009
Shigesada, N.; Kawasaki, K.; Teramoto, E.: Traveling periodic waves in heterogeneous environments. Theor. Pop. Bio. 30, 143–160, 1986
Taniguchi, M.: Traveling fronts of pyramidal shapes in the Allen–Cahn equation. SIAM J. Math. Anal. 39, 319–344, 2007
Taniguchi, M.: The uniqueness and asymptotic stability of pyramidal traveling fronts in the Allen–Cahn equations. J. Diff. Equ. 246, 2103–2130, 2009
Taniguchi, M.: Axially asymmetric traveling fronts in balanced bistable reaction-diffusion equations. Ann. Inst. H. Poincaré Analyse Non Linéaire, forthcoming
Taniguchi, M.: Axisymmetric traveling fronts in balanced bistable reaction-diffusion equations. Disc. Cont. Dyn. Syst. A 40, 3981–3995, 2020
Xin, X.: Existence and uniqueness of travelling waves in a reaction-diffusion equation with combustion nonlinearity. Indiana Univ. Math. J. 40, 985–1008, 1991
Xin, X.: Existence and stability of travelling waves in periodic media governed by a bistable nonlinearity. J. Dyn. Diff. Equ. 3, 541–573, 1991
Xin, J.X.: Existence of planar flame fronts in convective-diffusive periodic media. Arch. Ration. Mech. Anal. 121, 205–233, 1992
Xin, J.X.: Existence and nonexistence of traveling waves and reaction-diffusion front propagation in periodic media. J. Stat. Phys. 73, 893–926, 1993
Xin, J.X.; Zhu, J.: Quenching and propagation of bistable reaction-diffusion fronts in multidimensional periodic media. Phys. D 81, 94–110, 1995
Zlatoš, A.: Existence and non-existence of transition fronts for bistable and ignition reactions. Ann. Inst. H. Poincaré Analyse Non Linéaire 34, 1687–1705, 2017
Acknowledgements
We thank the anonymous referee for offering many helpful suggestions on revision and mentioning some problems which we did not notice initially.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by P. Rabinowitz.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Guo and Liu are partially supported by by NSF Grant 1826801. Guo is also partially supported by the fundamental research funds for the central universities and the National Natural Science Foundation of China under Grant 12101456. Li is supported by the National Natural Science Foundation of China under Grants 11731005 and 11671180. Wang is supported by the National Natural Science Foundation of China under Grant 12071193.
The original online version of this article was revised: In this article the affiliation “School of Mathematics and Statistics, Lanzhou University, Lanzhou, China” for Author Zhi-Cheng Wang was missing. Furthermore, in the footnote of the first page of this article the grant number relating to the National Natural Science Foundation of China given for Zhi-Cheng Wang was incorrectly given as 11371179 and should have been 12071193.
Rights and permissions
About this article

Cite this article
Guo, H., Li, WT., Liu, R. et al. Curved Fronts of Bistable Reaction-Diffusion Equations in Spatially Periodic Media. Arch Rational Mech Anal 242, 1571–1627 (2021). https://doi.org/10.1007/s00205-021-01711-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00205-021-01711-x