
Abstract
A comprehensive evaluation of Global Positioning System (GPS) Klobuchar, Galileo broadcast NeQuick2, international reference ionosphere (IRI) and global ionospheric map (GIM) models in estimating ionospheric total electron content (TEC) is performed using GPS-derived, constellation observing system for meteorology, ionosphere, and climate and JASON-2 TECs under various solar conditions in the Arctic and Antarctic. The performances of the four ionospheric models are first analysed for the overall polar regions. In addition, according to the temporal and spatial characteristics of the polar regions, the accuracies of the four models are evaluated for the polar days and nights, the Antarctic ice sheet (AIS) and the Arctic Ocean (AO), the Weddell Sea Anomaly (WSA) as well as for ionospheric storm. The results show that Klobuchar, NeQuick2, IRI2016 and GIM can mitigate the ionospheric delay by 28.69–29.41%, 44.57–56.09%, 43.38–55.99% and 67.17–77.56%, respectively. The performances of the four models during the polar days are obviously worse than those during the polar nights. In the AIS and AO, the Galileo broadcast NeQuick outperforms the GPS broadcast Klobuchar, and the root-mean-square error of IRI2016 performs almost the same as NeQuick2, but IRI2016 has a greater deviation. In addition, the GIM model can only mitigate the ionospheric delay by 46.81–56.72%, which is lower than other regions due to the lack of GPS ground station observations. Under the WSA conditions, the four models underestimate the real TEC to varying degrees, and the night-time deviations of the Klobuchar, NeQuick2 and IRI2016 models are significantly greater than the daytime deviations. The relative accuracy of four ionospheric models is lower during the ionospheric storm period than that in the ionospheric quiet period, especially the NeQuick2 and IRI2016 over the Antarctic.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
As human activity such as resource exploration, air and marine traffic and scientific research continues to increase in the polar regions, reliable Global Navigation Satellite System (GNSS) positioning navigation and timing (PNT) in the Antarctic and Arctic are becoming more and more important. Ionospheric delay is one of the major error sources in GNSS applications and is difficult to completely eliminate using ionospheric models due to the complex temporal and spatial variations of the ionosphere. The total electron content (TEC) is one of the basic ionospheric parameters used to characterize the ionosphere and is defined as the curvilinear integral of the electron densities along a given path from the receiver to the satellite (Davies and Hartmann 1997; Mannucci et al. 1999;). The ionospheric delay errors can be eliminated by combining concurrent multi-frequency measurements according to the dispersion properties of the ionosphere (Klobuchar 1991; Liu et al. 2011). However, the majority of single-frequency users can only correct the error using ionospheric models or additional ionospheric information. There are various ionospheric models that can be used to account for this ionospheric term, including broadcast models, empirical ionospheric models and grid ionospheric vertical delay (GIVD) models.
Broadcast models are driven by the ionospheric coefficients broadcasted by GNSS satellites, which mainly include the Global Positioning System (GPS) broadcast Klobuchar model (Klobuchar 1987), the Galileo broadcast NeQuick model (European Commission 2015; OS-SIS-ICD 2016; Wang et al. 2016a) and BeiDou broadcast Klobuchar model (Wu et al. 2013). Empirical ionospheric models, such as the international reference ionosphere (IRI) model (Bilitza et al. 2017) and the Bent model (Bent et al. 1975), can provide Earth’s ionospheric parameters and a climatological prediction. The GIVD model, like the global ionospheric maps (GIMs) provided by the International GNSS Service (IGS), can also be used to mitigate the ionospheric delay (Hernández-Pajares et al. 2009). The GIM models are constructed by the Ionosphere Associate Analysis Centers (IAACs) using TEC data derived from hundreds of GNSS stations worldwide.
Most of the existing studies mentioned above for ionospheric models were aimed at the low and middle latitudes (Leong et al. 2015; Jee et al. 2010; Orús et al. 2002; Venkatesh et al. 2014), while few studies have been done for high-latitude regions. However, at high latitudes, the spatial and temporal variations of TEC are unique because the ionosphere is influenced by magnetospheric processes (Kamide and Baumjohann 1979). Unlike the middle and low latitudes, where the ionosphere is affected more directly by solar activity level, the ionosphere of the polar region is also driven by electron precipitation and irregularities in electron densities (Liu et al. 2014a, b; Skone 1998). In addition, ionospheric disturbances can be severe at high latitudes due to their proximity to the polar cap, which is connected with the solar wind via open magnetic field lines (Liu et al. 2014a, b). Ionospheric irregularities causing GPS scintillations at high latitudes are often studied in the context of storm events (Basu et al. 2002). Furthermore, the scintillation index S4 increases for the GNSS satellites at low elevations observed at high latitudes (Aquino et al. 2009).
This study presents a comprehensive assessment of the GPS broadcast Klobuchar, Galileo broadcast NeQuick2, IRI2016 and GIM over the Antarctic and Arctic regions under various solar activities for the years 2014 and 2016. The performances of the four models are first analysed for the overall polar regions. In addition, according to the temporal and spatial characteristics of the polar regions, the accuracies of the four models are evaluated during the polar days and nights and over the Antarctic ice sheet (AIS), Arctic Ocean (AO), Weddell Sea Anomaly (WSA) and ionospheric storm.
For the overall polar regions, the four models are assessed using the GPS TEC at different seasons and geomagnetic latitudes, covering the middle and high geomagnetic latitudes. During the polar days and nights, the four models are also evaluated using the GPS TEC for January and July, which are the most representative periods of polar days and nights. Although the selected GPS stations cover most of the polar regions, there is a lack of availability of GPS stations and other ionospheric observations in the AIS and AO regions. The constellation observing system for meteorology, ionosphere and climate (COSMIC) TEC is used to assess the performances of the four models over the two regions. In addition, since the WSA mostly occurs in marine areas where GPS stations are not available, the JASON-2 observations can be used in the absence of GPS observations over the oceanic areas. For the WSA, we utilize the TEC of the GPS-derived and JASON-2 estimates to validate the four models. Finally, the performance of four ionospheric models is compared during ionospheric stormy (DOY 076, 2015) and quiet (DOY 075, 2015) periods based on GPS TEC. This work is the first time the four models have been evaluated under different typical polar ionosphere conditions.
2 Review of the ionosphere models
In this section, we give a brief introduction of the four models of Klobuchar, NeQuick2, IRI2016 and GIM, including their input and output parameters and their applications.
The Klobuchar model was proposed by Klobuchar (1987) in the 1980s based on simplifying the Bent model to correct the ionospheric delay errors for single-frequency GPS users. The diurnal variations of the ionosphere are depicted using a simple cosine function plus a constant offset of 5 ns. The amplitude and period of the cosine function are determined by a third-degree polynomial relative to a certain local time (LT) and geomagnetic latitude and consists of the eight coefficients transmitted in the GPS navigation message. In addition to the eight broadcast coefficients in the GPS navigation message, the model also needs the user location, satellite azimuth and elevation. GPS broadcast Klobuchar can mitigate the ionospheric delay by 50% at middle latitudes (Klobuchar 1987). According to a comparison with GPS and JASON TEC, the GPS Klobuchar can mitigate the ionospheric delay by 56.8 and 51.1% over continental and oceanic regions, respectively (Wang et al. 2016c). Over the polar region, the Klobuchar model fails to accurately depict the ionosphere due to the complicated temporal and spatial variations of the polar ionosphere. Therefore, Bi et al. (2016) proposed a modified Klobuchar model that improved the night-time term and the amplitude of the cosine term.
The NeQuick2 model is a 3D ionospheric electron density model that uses a modified profile formulation and was proposed by Di Giovanni and Radicella (1990). The International Telecommunication Union (ITU) recommended the model to correct the ionospheric delays for Galileo single-frequency users. NeQuick2 can be derived from the solar flux F10.7 or the effective ionization level Az, and the Az is used in this study. The Az value can be calculated using a second-order polynomial of the modified dip (MODIP) latitude of the user location, consisting of the three coefficients transmitted in the Galileo navigation message. The Az can be expressed as shown in Eqs. (1) and (2):
where μ is the modified dip; a0, a1, a2 are the broadcast coefficients from the Galileo navigation message; I is the magnetic inclination at a 300 km altitude; and ϕ is the geographic latitude of the user location. In addition to the Az value, the input parameters of NeQuick2 also include the time (year, month, day, UT) and locations of the receiver and satellite (latitude, longitude). According to specification of Galileo broadcast NeQuick model, the model can correct 70% of the ionospheric delay (OS-SIS-ICD 2016). Many studies assessed the accuracy of NeQuick by selecting global stations to calculate the model Az parameters due to lack of available Galileo broadcast coefficients (Bidaine and Warnant 2011; Wang et al. 2016a).
The International Reference Ionosphere (IRI) is the international standard empirical model for the terrestrial ionosphere and is recommended for international use by the Committee On Space Research (COSPAR) and the International Union of Radio Science (URSI) (Bilitza 2001). For a given location, time and date, IRI provides monthly averages of the electron density, electron temperature, ion temperature, ion composition in the ionospheric altitude range and TEC. IRI is annually updated during special IRI Workshops, and several steadily improved editions have been released. The most recent version, IRI-2016, is used in this study (Bilitza et al. 2017). The IRI model is widely studied and compared with the NeQuick2 model (Leong et al. 2015; Orús et al. 2002; Venkatesh et al. 2014). Over the Southeast Asian region, the IRI model is capable of predicting the TEC, showing a high correlation to the data in most cases (Leong et al. 2015). Compared to the TOPEX TEC over oceans and seas, the IRI model can mitigate the ionospheric delay by 59% (Orús et al. 2002).
The global ionosphere maps (GIMs) are provided by the Ionosphere Working Group of IGS and include three types of products: the final, rapid and predicted, respectively. Currently, there are seven IGS Associate Analysis Centres (IAACs) for the ionospheric products. These GIMs are computed by the IAACs with different approaches and are uploaded to IGS Ionosphere Product Coordinator (IPC) (Hernández-Pajares et al. 2017). The GIMs provided by the IAACs are weighted to obtain the official IGS combined products (Krankowski et al. 2010) as used in this study. The IGS GIMs are provided in the Ionosphere Exchange (IONEX) format with a spatial resolution of 2.5° × 5° in geographic latitude and longitude, and a temporal resolution of 15 min to 2 h. The ionospheric TEC values can be interpolated using the surrounding GIM grids based on the input parameters of the time and location of the user.
3 Data sets and processing methodology
To show a statistically representative result, the performances of multiple ionospheric models were validated for years of different levels of solar activity: low (2016) and high (2014). Figure 1 shows the time series of the levels of solar activity, F10.7 (in sfu), for the years 2014 and 2016. In addition, the performance of the models is also analysed during ionospheric storm that took place on 17 March 2015 (DOY 076, 2015).This study utilizes three types of model data and three types of observations.

Time series of the levels of solar activity, F10.7 (in sfu), for the years 2014 (blue line) and 2016 (red dotted line)
3.1 Model data
Four ionospheric models are evaluated over the polar regions, including the GPS Klobuchar, Galileo NeQuick2, IRI2016 and GIM models. The eight-coefficient data used by the Klobuchar model are obtained from the GPS broadcast ephemeris files provided by the Crustal Dynamic Data Information System (CDDIS) (ftp://cddis.gsfc.nasa.gov). The input parameter of NeQuick2 is the AZ value calculated using three coefficients in the Galileo broadcast ephemeris file. The GIM model used in this study is the official IGS combined final product named igsgxxxx.xxi provided by CDDIS.
3.2 Ionospheric observations
Three types of observations were used to assess model performance: the ground GPS observations, COSMIC TEC data and JASON-2 TEC data.
In the Arctic, the GPS observations were generated from the CDDIS archive of the IGS. However, in the Antarctic, the GPS observations were provided by the IGS and Polar Earth Observing Network (POLENET), as shown in Fig. 2.

Locations of the test sites (green circles), IGS sites (blue dots) and POLENET sites (red dots) in the Arctic (left) and Antarctic (right)
The COSMIC TEC is calculated via the integration of the electron density along the ray path tangent points. In addition, the vertical TEC above the top altitude of the ray path is estimated by extrapolation using the log-linear regression of the electron density profile for the uppermost 100 km of the tangent point heights. The COSMIC slant TECs are accurate to ~ 1–3 TECU after a correction of multipath and other errors (Yue et al. 2011). The COSMIC data are obtained from the COSMIC Data Analysis and Archive Center (CDAAC, http://cosmic-io.cosmic.ucar.edu/cdaac/index.html). For the present study, only the slant TEC data corresponding to the ray path tangent points of a profile with a top altitude greater than 800 km and bottom altitude less than 70 km were used.
The JASON satellite covers the global ocean within ± 66° in geographic latitude. The JASON TEC data are a product of the satellite radar altimetry missions that measure the surface heights of the global oceans from a dual-frequency radar altimeter that is self-consistently correcting the ionospheric delay effect by computing the total electron content along the ray path from the satellite to the sea surface. The orbit height of JASON satellite is up to 1300 km, including the full ionosphere and the most of the plasmasphere. The VTEC above 1300 km is just a small part of the plasmasphere with few TECUs only (Hernández-Pajares et al. 2017). The JASON satellite has a dual-frequency radar altimeter that operates simultaneously in C-band (5.3 GHz) and Ku-band (13.6 GHz), providing a reliable TEC measurements with a systematic bias of 2–5 TECUs (Orús et al. 2002).
3.3 Deriving TEC from GPS measurement and self-consistency analysis
The GPS-derived ionospheric TEC is calculated from the dual-frequency pseudo-range and carrier phase measurements at each station. Although the ionospheric TEC can be simply obtained by the geometry-free combination of pseudo-range observations, these values are affected by the noise and multipath effects (Wu et al. 2010). However, the carrier phase observations have high accuracies, but the unknown integer phase ambiguities are difficult to determine. The ionospheric TEC values can be obtained based on the approach of carrier-to-code levelling (CCL) applied to consecutive observations on a phase-continuous arc for an individual satellite, which are free of ambiguities and have lower noise and multipath effects than the pseudo-ranges (Komjathy 1997). In addition, the precise point positioning technique can also be used to retrieve the ionospheric observables from the single-frequency GNSS data (Zhang et al. 2017).
It should be noted that the derived ionospheric TEC also suffers from the satellite–receiver differential code biases (DCBs) (Wang et al. 2016b). To determine the actual slant TEC (STEC), the satellite DCBs are provided by the Center for Orbit Determination in Europe (CODE). In addition, the receiver DCBs are estimated in conjunction with ionosphere model parameters using the polynomial function (Lanyi and Roth 1988).
For this study, the sampling interval of the data was set to 300 s, and only the slant TEC data corresponding to the line-of-sight (LOS) with an elevation greater than 15° at the observation point were used to reduce the influence of the spatial gradients on ionospheric mapping (Jiang et al. 2018) and multipath effect.
In order to ensure the reliability of the evaluation, we check the consistency of the STEC between the reference used in this paper and the dual-frequency carrier phase combination LI = L1 − L2 of the raw dual-frequency GPS carrier phases (L1 and L2) by means of dSTEC test (Hernández-Pajares et al. 2017). The dSTEC is defined as the difference in the given STEC and the STEC at the highest elevation with accuracies ≤ 0.25 TECU, for each given pair of satellite and receiver, along a phase-continuous arc of observations (more details can be found in Hernández-Pajares et al. 2017 and Orús et al. 2005). In addition, we evaluated the reference ionospheric TEC derived from GPS observables based on 6 GNSS receivers (see Fig. 2) over the polar regions for the years 2014 and 2016, as shown in Fig. 3. It can be seen that the mean root-mean-square (RMS) errors are less than 1.46 TECUs under different conditions. However, the GIM model is the most accurate of the four models, with VTEC discrepancies (daily standard deviations) typically ranging from 3 to 10 TECUs based on VTEC-altimeter assessment, depending on the Solar Cycle phase (Hernández-Pajares et al. 2016). Therefore, the STEC derived from GPS observables is reliable as reference measurements.

Time series of the RMS for the dSTEC reference relative to the dSTEC observed for the years 2014 (top) and 2016 (bottom) over the polar regions
3.4 Evaluation indicators
In our study, we have computed the bias, RMS error and the relative correction accuracy (RMSrel) of the models regarding the GPS, COSMIC and JASON-2 TEC. The equations are shown as
where n is the total number of samples, TEC im is the vertical TEC (VTEC) calculated by the ionospheric models at the ith sample, TEC ir is the VTEC derived from observations at the ith sample, and \( \overline{{{\text{TEC}}_{\text{r}} }} \) is the mean value of reference TEC for selected period.
4 Results and discussion
In this section, the TEC computed from the Klobuchar, NeQuick2, IRI and GIM models is compared with the observational TEC derived from the GPS, JASON and COSMIC for the years 2014 and 2016 in the polar regions.
4.1 Overall evaluation of polar ionosphere modelling
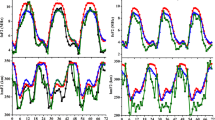
Figures 4 and 5 show the TEC difference maps between the models estimates and GPS-derived data for the years 2014 and 2016 in the Antarctic and Arctic, respectively. Each case has four ionospheric models: Klobuchar, NeQuick2, IRI2016 and GIM, shown from top to bottom of Figs. 4 and 5. The TEC maps are displayed in day of the year (DOY) and LT coordinates with a time resolution of 1 day × 0.5 h bins. The deviations of the four models have the same trends of change during high and low solar activity, but the deviations during high solar activity are significantly greater than those during low solar activity at the same local times. It can also be seen that the maximum deviations of the models occur between 12:00 and 16:00 LT each day. In addition, the differences of the TECs between the model and GPS observations present distinctly seasonal variation characteristics: in the Antarctic, the TEC computed from the models is less than the GPS-derived values in the summer, spring (October and November) and fall (March). However, in the winter, spring (September) and fall (April and May), the modelled TEC values are higher than the GPS-observed TECs. In the Arctic, each model presents different variation characteristics: the Klobuchar model obviously overestimates the TEC in the winter but underestimates the TEC in the spring, summer and autumn; the NeQuick2 model is opposite to the Klobuchar model, overestimating the TEC in the winter and underestimating the TEC in the other seasons. The IRI2016 model underestimates TEC throughout almost the entire year, with the maximum deviations occurring in the spring. The deviation of GIM is the smallest, with values varying from − 3.0 to 3.0 TECU without obvious seasonal variations.

Variations of the differences between the TEC estimates of the models and those that are GPS-derived, as a function of the day of year (x-axis) and the local time for the years 2014 and 2016 in the Antarctic

Variations of the differences between the TEC estimates of the models and those that are GPS-derived, as a function of the day of year (x-axis) and local time for the years 2014 and 2016 in the Arctic
To further analyse the seasonal variations of the model errors during years with different solar activities, Figs. 6 and 7 show the time series of the RMS for the Klobuchar, NeQuick2, IRI2016 and GIM TEC estimates compared to the GPS TEC in the Antarctic and Arctic, respectively. The RMS values on each day are calculated from the TEC differences between the model estimates and GPS-derived values at all of the ground stations. The RMS maxima of the four models are shown to appear around the March equinox and December solstice, and the minima appear between the June solstice and September equinox. The performance of each ionospheric model in the Arctic is superior to those in the Antarctic because there are more observations in the northern hemisphere to optimize the models. In addition, the level of solar activity has a considerable influence on the model error. In a high solar activity year, the maximum RMS of the Klobuchar, NeQuick2 and IRI2016 models can reach 20 TECU. However, in a low solar activity year, the NeQuick2 and IRI2016 errors are within 5 TECU, and the Klobuchar error is within 10 TECU. The RMS of the GIM is the smallest, varying by 2.0–6.0 TECU and 2.0–4.0 TECU during the years of high and low solar activities, respectively. The RMS time series trends of the IRI model are similar to those of the NeQuick2 model, and the accuracies of the two models are also similar. The GPS broadcast Klobuchar shows the largest modelling error.

Time series of the RMS for the Klobuchar, broadcast NeQuick2 and GIM TEC estimates relative to the GPS TEC for the years 2014 (top) and 2016 (bottom) in the Antarctic

Time series of the RMS for the Klobuchar, broadcast NeQuick2 and GIM TEC estimates relative to the GPS TEC for the years 2014 (top) and 2016 (bottom) in the Arctic
Table 1 shows the specific statistical results of the four models using the reference TEC and dSTEC method for the years 2014 and 2016 in the Antarctic and Arctic. As illustrated in Table 1, the four models in the Arctic outperform those in the Antarctic, and one of the possible reasons is that there are more observations in the northern hemisphere to optimize the models. As broadcast ionospheric models, the Galileo broadcast NeQuick model outperforms the Klobuchar model by approximately 20% during the test period, and the broadcast NeQuick model shows a lower deviation relative to the GPS TEC. As 3D ionospheric models, the IRI2016 model has a greater deviation than that of NeQuick2, which seriously underestimates the real TEC. Although the accuracy of the GIM model at low solar activity is visibly better than that at high solar activity (2.78 vs. 3.94 TECU and 2.25 vs. 3.43 TECU in the Antarctic and Arctic, respectively), at high solar activity, the model can mitigate larger proportion of ionospheric delay than it can at a low solar activity level (76.37 vs. 67.14% and 77.56 vs. 70.11% in the Antarctic and Arctic, respectively). In addition, the results show that the Bias and RMS of the Klobuchar, NeQuick2 and IRI models using dSTEC method is obviously smaller than that using reference TEC. The main reason for this feature is that dSTEC is applied to the three models; errors in terms of an entire bias infecting a whole phase-continuous arc cannot be distinguished due to differencing in dSTEC approach. For example, the Klobuchar model uses a constant (5 ns) to fit the ionospheric changes at night (Klobuchar 1987); when using dSTEC method to evaluate the model, the systematic error will be eliminated. However, the RMS of GIM model using dSTEC method is similar to that using reference TEC. The GIM model has higher precision relative to the other three models.
The TEC values of different latitudes vary widely at the same time and generally decrease as the latitude increases. To analyse the performances of the four models over these different latitudes, the relative accuracy index, RMSrel, of the differences between the model estimates and GPS-derived TEC values are calculated at each individual station and plotted in Fig. 8, with the ground stations aligned by geomagnetic latitude from north to south. The GPS observations are selected for the years 2014 and 2016. It is shown that the RMSrel is higher in the Arctic than in the Antarctic. In addition, the four models can mitigate larger proportion of the ionospheric delay in the mid-latitude regions than in the high-latitude regions.

Relative correction accuracy (\( {\text{RMS}}_{\text{relative}} \)) of the differences between the model TEC estimates and the GPS-derived TEC values at the individual ground stations for 2014 (top) and 2016 (bottom)
4.2 Evaluation of polar ionosphere modelling during the polar days and nights
The polar day and night are unique phenomenon that occurs only inside the polar circle. The polar night occurs when the night lasts for more than 24 h. The opposite phenomenon is that the polar day occurs when the Sun stays above the horizon for more than 24 h. The performances of the four ionospheric models were also analysed during the polar days and nights at all ground stations in the Antarctic and Arctic, respectively. January and July were selected for the years 2014 and 2016, which are the most representative of the polar days and nights.
The total number of selected TEC observations for the low and high solar activity levels exceeds 250 thousand in the Antarctic and Arctic. The normalized histograms of the TEC modelling errors relative to the GPS TEC are shown in Figs. 9 and 10 for the Antarctic and Arctic, respectively. Besides, the specific statistical results corresponding to Figs. 9 and 10 are given in Table 2. The four models are shown to have lower TEC modelling errors during low levels of solar activity than those during high solar activity. In addition, the accuracies of the four models in the Arctic are higher than those in the Antarctic. In the Antarctic, the performances of the four models during the polar days are obviously worse than those during the polar nights. However, in the Arctic, the model performances during the polar days are almost equal to those during the polar nights. Specifically, the accuracy of the Klobuchar model is the worst, and there is a large system deviation in addition to that of the polar days for the low solar activity in the Arctic. The main reason for this feature is that the Klobuchar model uses a constant (5 ns) to fit the ionospheric changes at night (Bi et al. 2016; Klobuchar 1987). Although the IRI2016 model has a relatively high accuracy, it has a significant negative bias relative to the GPS TEC values during polar days. The NeQuick2 and IRI2016 models have similar accuracies, but the NeQuick2 has a smaller bias than that of IRI2016 during the polar days. During the polar nights, the NeQuick2, IRI2016 and GIM present similar deviations relative to the GPS TEC in the Antarctic, but the model errors of NeQuick2 and IRI2016 are still slightly more scattered than that of GIM. As illustrated in Table 2, the four models have much better relative accuracies during the polar days than those of the polar nights. Although the RMS values of the four models are smaller during low solar activity than high solar activity (see Figs. 9 and 10), during high solar activity, the relative accuracy of IRI2016 and GIM is higher than that at low solar activity levels because the TEC is larger during the high solar activity than during the low solar activity. The statistical results show that the GIM performs best during both the low and high solar activity levels in the polar regions.

Histograms of the model errors for Klobuchar, broadcast NeQuick2 and GIM during the polar days (left) and polar nights (right) for the years 2014 (top) and 2016 (bottom) in the Antarctic

Histograms of the model errors for Klobuchar, broadcast NeQuick2 and GIM during the polar days (left) and polar nights (right) for the years 2014 (top) and 2016 (bottom) in the Arctic
4.3 Evaluation of the polar ionosphere modelling over the AIS and AO
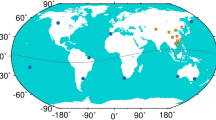
In this section, we quantitatively analyse the performance of the Klobuchar, NeQuick2, IRI2016 and GIM over the Antarctic ice sheet and Arctic Ocean regions using the TEC derived from COSMIC. There is a lack of continuous ground observations over these regions, and only COSMIC satellites can provide long-term continuous observations. Locations of the COSMIC sampling point (blue dots) are shown in Fig. 11 over the AIS and AO regions for the year 2014. Therefore, in order to show the applications of the models as much as possible throughout the polar regions, we utilize the COSMIC TEC for the years 2014 and 2016.

Locations of the COSMIC sampling point (blue dots) over the AIS and AO regions for the year 2014
Figures 12 and 13 show the TEC comparisons between the models estimates and COSMIC observations for the years 2014 and 2016 over the AIS and AO, respectively. To characterize the strength of relationship of TEC between COSMIC and ionospheric models, the Pearson correlation coefficient is provided in Table 3, for the years 2014 and 2016 over the AIS and AO. The TEC derived from the GIM model is shown to agree well with the COSMIC TEC data with relatively high Pearson correlation greater than 0.73 in the AIS, but in the AO the correlation coefficients are less than 0.6. The Klobuchar model does not reflect the basic ionospheric variability. The IRI2016 model underestimates the ionospheric TEC relative to the COSMIC observations in all cases. The TEC derived from NeQuick2 has a slight deviation relative to the COSMIC TEC but is relatively dispersed.

Model TEC estimates with respect to COSMIC TEC for the years 2014 and 2016 over the Antarctic ice sheet

Model TEC estimates with respect to the COSMIC TEC for the years 2014 and 2016 in the Arctic
Table 4 gives the statistical results of the Klobuchar, NeQuick2, IRI2016 and GIM over the Antarctic ice sheet and Arctic Ocean for the years 2014 and 2016. As shown in the table, the four models can mitigate much more of the ionospheric delay over Arctic Ocean than that over the Antarctic ice sheet. The Galileo broadcast NeQuick outperforms the GPS broadcast Klobuchar, and the relative RMS errors from the broadcast NeQuick model are 16.11 and 6.77% smaller than those from the Klobuchar model over the AIS for the years 2014 and 2016, respectively, as well as being 19.43 and 12.99% lower than those from the Klobuchar model over the AO for the years 2014 and 2016, respectively. Compared to the COSMIC TEC, the relative RMS errors of IRI2016 are almost the same as NeQuick2, but the IRI2016 values show a greater deviation. In these two regions, the GIM model has the lowest correction accuracy of any regions due to the lack of GPS ground station observations.
4.4 Evaluation of polar ionosphere modelling over the WSA
The WSA is a unique ionospheric phenomenon and occurs in the Antarctic Peninsula and Weddell Sea regions. It is shown that the night-time (18:00–02:00 LT) electron density is greater than the daytime (08:00–18:00 LT) density in the F region during local summer (Horvath 2006). In this section, we analyse the performances of the Klobuchar, NeQuick2, IRI2016 and GIM models under the WSA using the GPS-derived TEC and JASON-2 TEC. The GPS observations are selected during January, February and December of 2014 and 2016; however, JASON-2 data are available only in 2014. Locations of the selected GPS stations and JASON-2 sampling point are shown in Fig. 14 over the WSA region.

Locations of the selected GPS stations (red stars) and JASON-2 sampling point (blue dots) for 90 days from the DOY 001 to 59 and 335 to 365 in 2014 over the WSA region
Figure 15 shows the diurnal variations of the differences of the VTEC between the Klobuchar, NeQuick2, IRI2016 and GIM model estimates and the GPS-derived data from the selected ground stations. The difference of VTEC is an average value for 31 days from the DOY 001 to 031 in 2014 and 2016, respectively. The sites of SUGG and OHI3 are located in the WSA region, and the DAV1 station stands outside this region. As illustrated in Fig. 15, the peak of the bias of the four models occurs during local night (2 LT), and the daily minimum occurs during the local day between 12 and 16 LT at the selected stations of SUGG and OHI3, which is consistent with the characteristics of the ionospheric TEC in the WSA. In contrast, the difference VTEC from the site of DAV1 shows a typical mid-latitude diurnal behaviour, such that the maximum occurs at local noon and the minimum occurs during the local night.

Diurnal variations of the differences of the TEC between the Klobuchar, NeQuick2, IRI2016 and GIM model estimates and the GPS-derived at the selected ground stations for January 2014 (top) and 2016 (bottom)
To further analyse the performances of the Klobuchar, NeQuick2, IRI2016 and GIM models over the WSA, the bias, RMS and relative RMS errors of the four ionospheric models with respect to the GPS TEC values are given in Table 5. The statistical results are calculated from the observations of the six stations (PARC, OHI3, PALM, ROTH, SUGG and INMN) near the WSA for 89 days from DOY 335 to 365 and 001 to 58 in 2014 and 2016. It is shown that the performance of the GIM model varies little between the day and night. However, the deviation at night is twice that during the day for the Klobuchar, NeQuick2 and IRI2016 models. At night, the Klobuchar, NeQuick2 and IRI2016 models underestimate the ionospheric TEC, with an obvious negative deviation relative to the GPS-derived TEC. As three-dimensional models, the accuracy of IRI2016 is slightly higher than that of NeQuick2. In addition, as broadcast models for GPS and Galileo, the performance of the NeQuick2 model is obviously better than that of the Klobuchar model.
Although we compared the models with the GPS-derived TEC, the WSA also occurs in an oceanic area lacking GPS observations. The JASON-2 satellite data provide an excellent opportunity to study the WSA with the over-the-ocean JASON TEC data coverage. In this section, we have only 1 year of JASON-2 data for 2014 and are missing data for 2016 due to the end of the JASON-2 satellite mission occurring in 2015. An example of the TEC comparison between the Klobuchar, NeQuick2, IRI2016 and GIM model estimates and JASON-2 altimeter observations is shown in Fig. 16. It can be seen that the TEC computed from GIM agrees well with the JASON-2 TEC data with Pearson correlation coefficient 0.76. However, the Klobuchar, NeQuick2 and IRI2016 models underestimate the observed TEC. Specifically, the NeQuick2 and IRI2016 models can depict the ionospheric distributed characteristics, but the Klobuchar model has obviously deviations due to using a constant at night.

Model TEC estimates with respect to JASON-2 TEC for the year 2014
To perform a comprehensive comparison of the four models, the statistical results over the oceanic regions are shown in Table 6 during the period of the WSA in 2014. Compared to the JASON-2 TEC over the oceanic region of the WSA, the four models can mitigate much more of the ionospheric delay during day than at night, which is consistent with the results of the comparisons with the GPS TEC. However, the performances of the four models based on the JASON-2 TEC are worse with respect to the results from the GPS TEC values because of the lack of observations in marine areas to optimize the models.
4.5 Evaluation of the polar ionosphere modelling under geomagnetic storm
In this section, the performances of the four ionospheric models were also analysed during the stormy day over the Antarctic and Arctic, respectively. The reference STEC variability was compared during the selected 2 days (DOY 075-076, 2015) characterized by ionosphere quiet and stormy conditions. Figure 17 shows the disturbance storm time index (Dst), during quiet day (DOY 075) Dst remained in the range of 0–50 nT, while during stormy day (DOY 076) Dst dropped down to − 225 nT.

Variation of Dst indices during DOY 75–77, 2015
The normalized histograms and the specific statistical results of the TEC modelling errors relative to the GPS TEC are shown in Fig. 18 and Table 7 for the quiet and storm days over the Antarctic and Arctic, respectively. In the Antarctic, the four models have similar RMS errors during quiet day and stormy day, while the relative accuracy of four models is obviously higher during quiet day than that during stormy day. In the Arctic, the four models perform lesser TEC modelling errors in quiet day than in stormy day and have higher relative accuracy in quiet day than in stormy day.

Histograms of the model errors for Klobuchar, broadcast NeQuick2 and GIM during the geomagnetic storm day (left) and geomagnetic clam day (right) in the Arctic (top) and Antarctic (bottom)
5 Conclusions
This study assessed the performances of different kinds of ionospheric models using the ionospheric TEC observations derived from the GPS, COSMIC and JASON-2 altimeters under various solar conditions for the years 2014–2016 in the Antarctic and Arctic. The performance of the GPS broadcast Klobuchar, Galileo broadcast NeQuick2, IRI2016 and GIM models was first assessed for the overall polar regions. In addition, according to the unique temporal and spatial characteristics of the polar ionosphere, the accuracies of the four models were evaluated over the polar days and nights, Antarctic ice sheet, Arctic Ocean, Weddell Sea Anomaly (WSA) and ionospheric storm.
For the overall polar regions, according to comparing the four models with the GPS TEC values, the results show that the performances of the four models in the Arctic outperform those in the Antarctic. The TEC differences between the model and GPS-derived values present obviously seasonal variation characteristics, and the maximum deviations occur between 12:00 and 16:00 local time (LT) each day. Over the Antarctic, during the high solar activity, Klobuchar, NeQuick2, IRI2016 and GIM can mitigate the ionospheric delays by 28.73, 44.57, 43.38 and 76.37%, respectively; during the low solar activity, the four models can mitigate the ionospheric delays by 28.69, 49.26, 49.42 and 67.17%. In the Arctic region, during the high solar activity, Klobuchar, NeQuick2, IRI2016 and GIM can mitigate the ionospheric delay by 28.69, 49.26, 53.20 and 77.56%, respectively; during the low solar activity, the four models can mitigate 29.41, 56.09, 55.99 and 70.11% of the ionospheric delay.
Compared to the GPS TEC values, the four models have much better relative accuracies during the polar days than those during the polar nights. In the Antarctic, the performances of the four models during the polar days are obviously worse than those during the polar nights. However, in the Arctic, the modelling performances during the polar days are almost equal to those during the polar nights.
For the Antarctic ice sheet and Arctic Ocean, it is shown that the Galileo broadcast NeQuick2 obviously outperforms the GPS broadcast Klobuchar by 16.11, 6.77, 19.43 and 12.99% during the high and low solar activities, respectively. The relative RMS error of IRI2016 is almost the same as NeQuick2, but IRI2016 has greater deviations. In these two regions, the GIM model has a lower accuracy relative to any other region due to the lack of GPS ground station observations.
During the WSA, the four models show better daytime performances than those at night and underestimate the real TEC to varying degrees, especially in terms of the night-time deviations. The nightly RMS values of the Klobuchar, NeQuick2 and IRI2016 models are significantly larger than the daytime deviations.
Under the ionospheric storm conditions, the performance of four ionospheric models is reduced compared with the ionospheric quiet period. In the Antarctic, the relative accuracy of the Klobuchar, Galileo broadcast NeQuick, IRI2016 and GIM models is reduced by 4.02, 3.65, 8.55 and 8.33% during the stormy day, respectively. In the Arctic, the relative accuracy of the four models is reduced by 3.97, 13.34, 13.90 and 5.93% during the stormy day, respectively.
References
Aquino M, Monico JFG, Dodson AH, Marques H, Franceschi GD, Alfonsi L, Romano V, Andreotti M (2009) Improving the GNSS positioning stochastic model in the presence of ionospheric scintillation. J Geodyn 83(10):953–966
Basu S, Groves KM, Basu S, Sultan PJ (2002) Specification and forecasting of scintillations in communication/navigation links: current status and future plans. J Atmos Sol Terr Phys 64(16):1745–1754. https://doi.org/10.1016/S1364-6826(02)00124-4
Bent RB, Llewellyn SK, Nesterczuk G, Schmid PE (1975) The development of a highly-successful worldwide empirical ionospheric model and its use in certain aspects of space communications and worldwide total electron content investigations. In: Effect of the ionosphere on space systems and communications, pp 351–379
Bi T, An J, Yang J, Liu S (2016) A modified Klobuchar model for single-frequency GNSS users over the polar region. Adv Space Res 59(3):833–842
Bidaine B, Warnant R (2011) Ionosphere modelling for Galileo single frequency users: illustration of the combination of the NeQuick model and GNSS data ingestion. Adv Space Res 47(2):312–322
Bilitza D (2001) International reference ionosphere 2000. Radio Sci 36(2):261–275
Bilitza D, Altadill D, Truhlik V, Shubin V, Galkin I, Reinisch B, Huang X (2017) International reference ionosphere 2016: from ionospheric climate to real-time weather predictions. Space Weather 15(2):418–429
Davies K, Hartmann GK (1997) Studying the ionosphere with the global positioning system. Radio Sci 32(4):1695–1703. https://doi.org/10.1029/97RS00451
Di Giovanni G, Radicella S (1990) An analytical model of the electron density profile in the ionosphere. Adv Space Res 10(11):27–30
European Commission (2015) European GNSS (Galileo) Open service-ionospheric correction algorithm for Galileo single frequency users. 1.2
Hernández-Pajares M, Juan JM, Sanz J, Orus R, Garcia-Rigo A, Feltens J, Komjathy A, Schaer SC, Krankowski A (2009) The IGS VTEC maps: a reliable source of ionospheric information since 1998. J Geodyn 83(3–4):263–275. https://doi.org/10.1007/s00190-008-0266-1
Hernández-Pajares M, Roma-Dollase D, Krankowski A, GhoddousiFard R, Yuan Y, Li Z, Zhang H, Shi C, Feltens J, Komjathy A, Vergados P, Schaer S, Garcia-Rigo A, Gmez-Cama JM (2016) Comparing performances of seven different global VTEC ionospheric models in the IGS context. In: IGS workshop, 8–12 Feb 2016, Sydney, Australia, International GNSS Service (IGS). International GNSS Service (IGS), pp 1–31
Hernández-Pajares M, Roma-Dollase D, Krankowski A, García-Rigo A, Orús-Pérez R (2017) Methodology and consistency of slant and vertical assessments for ionospheric electron content models. J Geodyn 2:1–10. https://doi.org/10.1007/s00190-017-1032-z
Horvath I (2006) A total electron content space weather study of the nighttime Weddell Sea Anomaly of 1996/1997 southern summer with TOPEX/Poseidon radar altimetry. J Geophys Res 111(A12):99–103
Jee G, Lee HB, Kim YH, Chung JK, Cho J (2010) Assessment of GPS global ionosphere maps (GIM) by comparison between CODE GIM and TOPEX/Jason TEC data: ionospheric perspective. J Geophys Res 115(A10):161–168
Jiang H, Wang Z, An J, Liu J, Wang N, Li H (2018) Influence of spatial gradients on ionospheric mapping using thin layer models. GPS Solut 22(1):2. https://doi.org/10.1007/s10291-017-0671-0
Kamide Y, Baumjohann W (1979) Magnetosphere-ionosphere coupling. J Geophys Res 84(A12):7239–7246
Klobuchar JA (1987) Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans Aerosp Electron Syst 23(3):325–331
Klobuchar JA (1991) Ionospheric effects on GPS. GPS World 2(4):48–51
Komjathy A (1997) Global ionospheric total electron content mapping using the global positioning system. University of New Brunswick, Fredericton
Krankowski A, Wielgosz P, Hernándezpajares M, Garcíarigo A (2010) Present and future IGS ionospheric products. In: EGU General Assembly conference
Lanyi GE, Roth T (1988) A comparison of mapped and measured total ionospheric electron content using global positioning system and beacon satellite observations. Radio Sci 23(4):483–492
Leong SK, Musa TA, Omar K, Subari MD, Pathy NB, Asillam MF (2015) Assessment of ionosphere models at Banting: performance of IRI-2007, IRI-2012 and NeQuick 2 models during the ascending phase of Solar Cycle 24. Adv Space Res 55(8):1928–1940
Liu J, Chen R, Wang Z, Zhang H (2011) Spherical cap harmonic model for mapping and predicting regional TEC. GPS Solut 15(2):109–119
Liu J, Chen R, An J, Wang Z, Hyyppa J (2014a) Spherical cap harmonic analysis of the Arctic ionospheric TEC for one solar cycle. J Geophys Res 119(1):601–619. https://doi.org/10.1002/2013ja019501
Liu J, Chen R, Wang Z, An J, Hyyppä J (2014b) Long-term prediction of the Arctic ionospheric TEC based on time-varying periodograms. PLoS ONE 9(11):e111497
Mannucci A, Iijima B, Lindqwister U, Pi X, Sparks L, Wilson B (1999) GPS and ionosphere. URSI reviews of radio science. Jet Propulsion Laboratory, Pasadena
Orús R, Hernández-Pajares M, Juan JM, Sanz J, Garcı́A-Fernández M (2002) Performance of different TEC models to provide GPS ionospheric corrections. J Atmos Sol Terr Phys 64(18):2055–2062
Orús R, Hernández-Pajares M, Juan J, Sanz J (2005) Improvement of global ionospheric vtec maps by using kriging interpolation technique. J Atmos Sol Terr Phys 67(16):1598–1609
OS-SIS-ICD (2016). European GNSS (Galileo) Open service, signal-in-space interface control document, Issue 1.3, European Union and European Space Agency (ESA)
Skone S (1998) Wide area ionosphere grid modelling in the auroral region. Dissertation, University of Calgary
Venkatesh K, Fagundes PR, Jesus RD, Abreu AJD, Pillat VG, Sumod SG (2014) Assessment of IRI-2012 profile parameters by comparison with the ones inferred using NeQuick2, ionosonde and FORMOSAT-1 data during the high solar activity over Brazilian equatorial and low latitude sector. J Atmos Sol Terr Phys 121:10–23
Wang N, Yuan Y, Li Z, Li Y, Huo X, Li M (2016a) An examination of the Galileo NeQuick model: comparison with GPS and JASON TEC. GPS Solut 21(2):605–615
Wang N, Yuan Y, Li Z, Montenbruck O, Tan B (2016b) Determination of differential code biases with multi-GNSS observations. J Geodyn 90(3):209–228
Wang N, Yuan Y, Li Z, Huo X (2016c) Improvement of Klobuchar model for GNSS single-frequency ionospheric delay corrections. Adv Space Res 57(7):1555–1569
Wu Y, Jin SG, Wang ZM, Liu JB (2010) Cycle slip detection using multi-frequency GPS carrier phase observations: a simulation study. Adv Space Res 46(2):144–149
Wu X, Hu X, Wang G, Zhong H, Tang C (2013) Evaluation of COMPASS ionospheric model in GNSS positioning. Adv Space Res 51(6):959–968
Yue X, Schreiner WS, Hunt DC, Rocken C, Kuo YH (2011) Quantitative evaluation of the low Earth orbit satellite based slant total electron content determination. Space Weather 9(9):1–14
Zhang B, Teunissen PJG, Yuan Y, Zhang H, Li M (2017) Joint estimation of vertical total electron content (VTEC) and satellite differential code biases (SDCBs) using low-cost receivers. J Geod 92(4):401–413
Acknowledgements
The authors would like to acknowledge the International GNSS Services (IGS), the Polar Earth Observing Network (POLENET), the COSMIC Data Analysis and Archive Center (CDAAC) as well as the Center for Orbit Determination in Europe (CODE) for providing access to the observations. We would also like to acknowledge all the developers of the above-studied ionospheric models. Our deepest gratitude goes to the anonymous reviewers, editors and Professor Manuel Hernández-Pajares for their careful work and thoughtful suggestions that have helped improve this paper substantially. This research was supported by the Natural Science Funds of China (Nos. 41776195, 41231064, 41531069 and 41574015) and the National Key Research Development Program of China with Project No. 2016YFE0202300.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Jiang, H., Liu, J., Wang, Z. et al. Assessment of spatial and temporal TEC variations derived from ionospheric models over the polar regions. J Geod 93, 455–471 (2019). https://doi.org/10.1007/s00190-018-1175-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-018-1175-6