
Abstract
The BeiDou-3 system uses the BeiDou Global broadcast Ionospheric delay correction Model (BDGIM) to describe global vertical total electron content (VTEC) distributions and provide ionospheric delay mitigations in single-frequency positioning. The transmission of BDGIM correction parameters in the navigation message of BeiDou-3 started in mid-2015. The limited coverage of BeiDou-3 transmitted BDGIM parameters inhibits the evaluation of model performance during different levels of solar conditions. As such, we present a method to re-estimate BDGIM correction parameters and generate model parameters during the period 2010–2017 using a small global network of 20 global navigation satellite system (GNSS) stations. Tests covering the eight years demonstrate that BDGIM can reduce the ionospheric error to less than 25% for 98% of the examined samples when compared to global ionospheric maps (GIMs) provided by the International GNSS Service (IGS), and for 90% when compared to the observed VTECs from Jason-2/3 altimetry missions. Overall, BDGIM reduces residual ionospheric delays by 10–20% compared to the ionospheric correction algorithm (ICA) of the global positioning system (GPS), the empirical International Reference Ionosphere (IRI) 2016, and our fitted NeQuick-C model. The root-mean-square (RMS) error of BDGIM increases by 32 and 21% in comparison with GIM-derived and Jason-2 observed VTECs during the geomagnetic storm in March 2015, indicating the significant degradation of model performance during the disturbed geomagnetic period.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The application of space-based radio systems in L-band, like the Global Navigation Satellite System (GNSS), is severely affected by the signal propagation error induced by the earth’s ionosphere. While the first order of ionospheric range error can be mitigated by forming the ionospheric-free linear combination of simultaneous GNSS measurements at two or more frequencies due to the dispersive nature of the ionosphere, a large number of single-frequency GNSS applications are reliant on the prior ionospheric information to correct the ionospheric path delay. Among them, ionospheric correction parameters transmitted in the navigation message of the Global Positioning System (GPS), Galileo and BeiDou are commonly used for the ionospheric error mitigation in single-frequency positioning (Klobuchar 1987; Prieto-Cerdeira et al. 2014; Yuan et al. 2019).
GNSS broadcast ionospheric delay correction model is designed to provide a global description of ionospheric total electron contents (TEC), or even direct electron density distributions, using a limited set of transmitted parameters (Hoque and Jakowski 2015). The first category of ionospheric correction algorithm (ICA) is based on a thin-shell ionospheric approximation to estimate the vertical TEC (VTEC) of the ionospheric pierce point (IPP). The line-of-sight ionospheric delay is then calculated by multiplying an elevation-dependent mapping function. As an example, GPS ICA describes the diurnal variation of the vertical ionospheric delay as a half positive cosine wave plus a constant offset based on an assumed ionospheric layer at the height of 350 km (Klobuchar 1987). The eight ionospheric parameters of GPS ICA are selected from a sub-set of model coefficients, which were predetermined through the Bent empirical model (Klobuchar 1987). Since GPS ICA only corrects about 50% of the ionospheric range error, different methods have been proposed to improve the correction capability of GPS ICA by refining the original model coefficients (Yuan et al. 2008; Wang et al. 2019a) or extending the model structure (Wang et al. 2016a, b, 2019b) using the high-quality ionospheric TEC data derived from a global network of GNSS receivers. The second category of ICA provides a direct description of the time- and location-dependent electron densities. The slant TEC (STEC) can be determined by integrating the electron densities along the line of sight between the receiver and the GNSS satellite. Galileo is the first and presently the only system that adopts a three-dimensional model, i.e., the NeQuick-G, for single-frequency ionospheric corrections (Prieto-Cerdeira et al. 2014). For the transition from a climatological to a nowcast model with real-time ionospheric correction capability, the dependency on solar activities in the original NeQuick-1 and NeQuick-2 is substituted in NeQuick-G by three effective ionization level parameters that are routinely determined by the Galileo ground segment and transmitted to Galileo users (Nava et al. 2008; Orus-Perez et al. 2018). The three-dimensional nature of the NeQuick-G enables the computation of STEC for arbitrary user locations without the height limitation, and thus, in support of applications from the near-earth to space users (Montenbruck and González 2019). The assessment covering the period of solar maximum and minimum conditions shows that the NeQuick-G model can reduce the residual ionospheric slant error to less than 30% of the total STEC for more than 85% of the examined observations in both tests of terrestrial and space users (Orus et al. 2018; Montenbruck and González 2019).
Since the pseudorange-based dual-frequency positioning significantly suffers from the increased noise level of the ionospheric-free combination, the positioning error of the dual-frequency solution might be larger than that of the ionospheric-model-corrected single-frequency solution, in case the amplified pseudorange noise exceeds the residual ionospheric model error (Orus-Perez 2016). As such, efforts have been made on the reconstruction of alternative ionospheric models with increased correction capability and reduced computational complexity for the emerging GNSS. Based on the empirical Neustrelitz TEC global model (NTCM-GL, Jakowski et al. 2011), a broadcast version of the NTCM-GL model, i.e., NTCM-BC (Hoque and Jakowski 2015), is proposed by the German Aerospace Center (DLR) to mitigate ionospheric errors for single-frequency GNSS application. The NTCM-BC contains nine ionospheric broadcast parameters, which can be continuously updated using the global GNSS station network on a daily basis. Tests have demonstrated that NTCM-BC enables significant error mitigation compared to GPS ICA, and a comparable correction performance compared to NeQuick-G with a pronounced reduction in the computation time (Hoque and Jakowski 2015). As GNSS users have no access to the model parameters of NTCM-BC in the operational environment, the evaluation of using GPS and Galileo broadcast ionospheric parameters to drive the original NTCM-BC model was also performed for fast ionospheric corrections at the processing level of GNSS receivers (Hoque et al. 2017, 2019).
For BeiDou, different correction models are designed for single-frequency users of the regional BeiDou-2 and global BeiDou-3 systems. BeiDou-2 adopts a Klobuchar-like model, which resembles GPS ICA but is formulated in a geographic coordinate system, to provide ionospheric correction service in the Asia-Pacific region (Wu et al. 2013). The evaluation in the China region has shown that BeiDou-2 ICA can mitigate more than 65% of the ionospheric delay error and reduce about 5% in single-frequency positioning errors compared to GPS ICA (Wang et al. 2018). BeiDou-3 employs a newly designed correction model, i.e., BeiDou Global Ionospheric delay correction Model (BDGIM), to describe the two-dimensional distribution of global VTECs under a thin-shell ionospheric assumption (CSNO 2017a, 2017b). BDGIM is developed based on the spherical harmonic expansion with a reduced degree in model parameters to enable a reduction in model computation load. The nine broadcast parameters of BDGIM are determined by the BeiDou ground segment and updated every 2 hours in the BeiDou navigation message (Yuan et al. 2019). The transmission of BDGIM ionospheric correction parameters started in April 2015 with the construction of BeiDou-3 demonstration system (BeiDou-3S). Performance assessment of BDGIM during the BeiDou-3S phase was first presented in Yuan et al. (2019). It was reported that BeiDou-specific BDGIM can achieve an overall correction capability of 80% in the China region and reduces the residual ionospheric error by 12 and 17% in comparison with BeiDou-2 and GPS ICAs, respectively. Tests during the preliminary service phase of BeiDou-3, using the global ionospheric map (GIM) as VTEC reference, show that BeiDou-specific BDGIM can correct 65–80% of the ionospheric delay on global scales with a high dependence on the geographic locations (Zhu et al. 2019; Yang et al. 2020).
Obviously, the performance of BDGIM had only been evaluated during the recent low solar activity period. While ionospheric correction parameters of BDGIM have been transmitted in the navigation message of BeiDou-3S and BeiDou-3 satellites since mid-2015, these parameters are not publicly available as they, by the end of January 2020, are not recorded in the header of RINEX navigation files collected by the multi-GNSS network of the International GNSS Service (IGS) or other agencies. This can be partly attributed to the missing definition of BDGIM ionospheric parameters in the latest RINEX v3.04 standard. To assess the correction capability of BDGIM before the coming solar maximum condition of cycle 25, we focus on the model parameter estimation and performance evaluation of BDGIM during the past solar cycle 24. Considering the difficulty of the BeiDou ground segment in the maintenance of a global tracking network, the estimation of BDGIM correction parameters is only based on a small set of global GNSS receivers. Following this introduction, the model structure of BDGIM is briefly described, and the method is presented to determine BDGIM correction parameters. The data sets and processing strategies are then provided, followed by the analysis of model performance in comparison with the independent TEC references provided by the IGS-GIM and Jason-2/3 altimetry satellites. Finally, a summary and conclusions are given.
BDGIM description and model parameter estimation
BDGIM is a two-dimensional ionospheric correction model, which describes the global VTEC distribution on an assumed ionospheric thin shell at an altitude of 400 km (CSNO 2017a, 2017b). The model was developed by the Institute of Geodesy and Geophysics (IGG), the Chinese Academy of Sciences (CAS) in Wuhan (Yuan et al. 2019). Before the adoption of BDGIM as a broadcast ionospheric model of BeiDou-3, an empirical global TEC model called IGG Spherical Harmonics (IGGSH) was proposed to describe the climatological behavior of the global ionosphere based on the spherical harmonic expansion up to degrees 15 (Yuan et al. 2005). The reconstruction of IGGSH model relies on modeling each SH coefficient using harmonic expansion with identified periodicities. Given that ionospheric parameters of the broadcast model need to be continuously updated to describe changes of the ionosphere, BeiDou Spherical Harmonics (BDSSH) was proposed for real-time ionospheric error mitigation by the adaption of the empirical IGGSH model (Yuan et al. 2014). The first nine SH parameters in the BDSSH model, which contribute to the majority of the derived total ionospheric delay, can be estimated using ground GNSS receivers. The remaining model structure of IGGSH is kept but with a simplified periodicity for the computation of predicted SH parameters from degree 4 to 15. In this way, the nine ionospheric parameters in BDSSH can be routinely updated using the real ionospheric observation and transmitted to single-frequency GNSS users in the operational environment.
BDGIM can be considered as a simplified version of BDSSH with a reduction in model computational complexity. The model describes the global VTEC distribution in a sun-fixed geomagnetic reference frame using the spherical harmonic expansion. The vertical ionospheric delay Iv in TEC unit (TECU) in BDGIM is described as the sum of an estimation part, which needs to be continuously updated through the nine broadcast parameters, plus a prediction part, which comprises an empirical model depending on the time, user location and periodicity of the ionospheric behavior.
using \(\alpha_{i}\) for broadcast SH parameters transmitted as part of the navigation message of BeiDou-3,\(\beta_{j}\) for predicted SH parameters determined by the time- and periodicity-dependent harmonic expansion,\(\mu_{1}\) and \(\mu_{2}\) for the number of transmitted and predicted parameters equaling to 9 and 17, respectively, Ai and Bj for the normalized Legendre polynomial depending on the geomagnetic longitude and latitude of the IPP in a solar-fixed reference frame. Since BDGIM is a vertical delay model, an elevation-dependent mapping function is used for converting TEC from the vertical to the slant direction. For details on the model structure of BDGIM, as well as the comparisons between GPS ICA, NeQuick-G and BDGIM, we refer to Yuan et al. (2019).
Similar to BDS-2 ICA, the update interval of BDGIM broadcast parameters is 2 hours, which is higher than that of NeQuick-G (12 hours, Orus et al. 2018) or GPS ICA (few days, Klobuchar 1987). The estimation of BDGIM broadcast parameters is based on a 24-hour sliding window of STEC observations generated at individual BeiDou tracking stations maintained by the BeiDou ground segment (Yuan et al. 2019). Given that the correction parameters of BDGIM are presently not available from the public data repository, e.g., the IGS, a method is presented to re-estimate BDGIM parameters using a small network of global GNSS receivers. Since the total ionospheric delay in BDGIM comprises a continuously updating part estimated through broadcast SH parameters and an empirical predicting part through predicted SH parameters, the observation equation in the estimation of BDGIM parameters can be written in the matrix form as follows,
using \(Z_{{{\text{stec}}}}\) for the matrix of observed STECs,\(X_{{{\text{brd}}}}\) and \(X_{{{\text{fix}}}}\) for the vector of broadcast and predicted SH parameters in BDGIM as explained in (1),\(F_{{{\text{brd}}}}\) and \(F_{{{\text{fix}}}}\) for the corresponding design matrix, and \(\hat{X}_{{{\text{fix}}}}\) for the prior value of predicted parameters that are determined by a time- and periodicity-dependent empirical model.
In the case STEC observations are derived from a global network of GNSS receivers, the least-squares adjustment can be used to estimate the desired model parameter of BDGIM
where \(\hat{X}_{{{\text{brd}}}}\) denotes the model parameter estimate which provides the best overall fitting between modeled and observed STECs,\(D_{{\hat{X}_{{{\text{brd}}}} }}\) is the covariance matrix of the derived model parameters,\(P\) denotes the weight matrix, which describes the noise level of STEC observations and \(\sigma^{2}\) is the posterior variance of the least-square solution.
Other than the GPS and Galileo, it is difficult for the BeiDou ground segment to maintain a global tracking station network. As the estimation of global ionospheric parameters requires stations globally distributed for the generation of STEC observations, a limited set of GNSS stations outside of China are selected together with those located in mainland China to determine the correction parameters of BDGIM in the present study. Model parameters of BDGIM are estimated every 2 hours using a sliding window of 24-hour STEC observations to keep in proper accord with the processing strategy employed within the BeiDou ground segment.
Data sets and processing
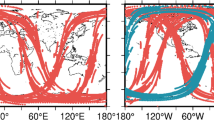
A total of 20 GNSS stations were selected to generate the required STEC observations for BDGIM parameter estimation. As depicted in Figure 1, nine of them are located outside of China, which are part of the IGS network. The remaining stations are within China and belong to the Crust Movement Observation Network of China (CMONOC). The selected ground stations are expected to provide STEC observations covering different latitudes of the global ionosphere.

Distribution of the selected GNSS receivers for the estimation of BDGIM correction parameters. The yellow squares and blue dots denote CMONOC and IGS stations, respectively. The dotted line denotes the geomagnetic equator
STEC is derived from the L1-L2 difference of code-leveled carrier phase observations of GPS and GLONASS systems. The derived STEC suffers from differential code biases (DCBs) in satellite and receiver parts, which need to be removed to obtain the bias-free STEC. As an Ionosphere Associate Analysis Center (IAAC) of the IGS, multi-GNSS DCBs are routinely generated by CAS using observation data from the IGS and its multi-GNSS networks (Wang et al. 2020). Here, satellite DCBs of GPS and GLONASS are fixed to CAS DCB products. While receiver DCBs of those IGS stations are compensated by CAS DCB solutions (Wang et al. 2016a, b), receiver DCBs of CMONOC stations are estimated as part of the station-specific VTEC modeling as described in Li et al. (2012). To reduce the uncertainty in satellite and receiver DCB estimates, we employ an automatic bias realignment method to generate the three-day aligned DCBs (Wang et al. 2019c), which then provide the compensation for satellite and receiver DCBs in the observed STEC. Given the different noise levels of STEC values obtained from GPS and GLONASS, separate weights are applied to the individual constellation aside from the use of a satellite-elevation-dependent stochastic model in the least-squares adjustment (Wang et al. 2019a). The estimation of BDGIM correction parameters is based on STEC observations of all selected stations with a 15-degree elevation mask and a 24-hour sliding window. The routine generation of BDGIM correction parameters was implemented at IGG/CAS in Wuhan. The re-estimated BDGIM parameters are provided in files in RINEX v3.04 format and publicly available from CAS repository (ftp://ftp.gipp.org.cn/product/brdion/).
The performance evaluation of BDGIM was presented during an 8-year period (2010–2017), which covers solar maximum and minimum conditions of cycle 24. The comparison was first performed by analyzing the model-based and IGS-GIM-derived VTEC values to evaluate the performance of BDGIM on global scales. IGS GIM is a weighted combination of GIMs generated independently by individual IAACs, which provides a good reference of the global ionosphere with an overall accuracy of 2.0–8.0 TECU depending on different levels of solar activities and geographic locations (Roma-Dollase et al. 2018). In addition, model-based VTECs are also compared to the reference VTECs obtained from Jason-2/3 altimetry satellites over the global ocean. Jason-series altimeters operate on a mean orbit altitude of about 1330 km with a Ku-band primary frequency and a C-band auxiliary frequency, which can provide TEC observations in the vertical direction between the ocean surface and altimeter orbit altitude. The raw data were smoothed by applying a smoothing procedure as described in Hernández-Pajares et al. (2017). Due to the lower orbit altitude of altimetry satellites, altimeter observed TECs should be smaller than GNSS-derived TECs, since the latter one also contains the contribution of plasmaspheric electron content up to the height of about 20,000 km. The observed VTECs from altimetry satellites have a systematic bias in the order of a few TECU, particularly at low-latitude and equatorial regions (Orus-Perez et al. 2002). As such, the analysis of standard deviations of the differences between model-based VTECs (e.g., GIM-VTECs) and VTECs obtained from dual-frequency altimeters is preferred (Hernández-Pajares et al. 2017; Roma-Dollase et al. 2018). Note that, the evaluation is presented in terms of VTEC errors by comparison with IGS-GIM and Jason-2/3 reference values. Residual ionospheric model errors in slant direction should increase by a factor of 2–3 because of the VTEC-to-STEC mapping under the single-layer ionospheric assumption (Hoque et al. 2017).
The comparison between BDGIM-based and IGS-GIM-derived VTEC values for the March equinox in 2017 (low solar condition) and 2014 (high solar condition) is depicted in Figure 2. Green, blue and pink colors identify data points within high (57.5°N–85°N and 57.5°S–85°S), middle (27.5°N–55°N and 27.5°S–55°S) and low (25°S–25°N) latitudinal regions in both cases. BDGIM-based VTEC shows a good agreement with GIM-derived VTEC in the low solar activity condition since a mostly balanced data distribution around the symmetry line is observed in the top panel. In the case of the high solar activity condition, as shown in the bottom panel, BDGIM appears to underestimate the reference VTEC on the selected day. The performance of BDGIM during high solar conditions will be examined and presented in the subsequent sections with more observation data. Note that, model-based and GIM-derived VTECs are shown with a minimum value of 2.0 TECU here. Since minus VTEC value might appear in the year of low solar activities, in particular for high-latitude regions, it is suggested to calculate the minimum vertical ionospheric delay (Iv,min in TECU) in BDGIM through the following relation

Comparison of model-based and GIM-derived VTECs on March equinox of 2017 (top) and 2014 (bottom). Green, blue and pink colors distinguish the result of high, middle and low latitudinal regions, respectively
where \(\alpha_{0}\) denotes the first transmitted parameter of BDGIM, and \(I_{v}\) is the vertical ionospheric delay referring to (1). BDGIM-based VTEC estimate is finally determined based on (1) and (4).
Results and discussion
This section starts with the performance evaluation of different ionospheric models by comparison with IGS-GIM VTECs, followed by a comparison with Jason-2/3 observed VTECs covering the time 2010–2017. Model performance under different geomagnetic conditions is finally presented during the selected disturbed (DOY 71–85) and quiet (DOY 140–154) periods in 2015. In addition to the BDGIM of interest, the involved correction models also include GPS ICA, our fitted NeQuick-C (Wang et al. 2017) and International Reference Ionosphere 2016 (IRI-2016, Bilitza et al. 2017). Among them, GPS ICA uses the eight ionospheric coefficients transmitted in the navigation message of GPS, whereas the correction parameters of BDGIM and NeQuick-C are computed using a global network comprising of 20 and 25 GNSS stations, respectively.
Comparison with IGS-GIM VTEC
Before the long-term evaluation of BDGIM, the performance of the Galileo specific NeQuick-G, our fitted NeQuick-C and BDGIM, as well as the empirical IRI-2016 model, was first evaluated in the fourth quarter of 2014 and 2017. Figure 3 depicts RMS (root-mean-square) differences of the above four correction models relative to GIM VTECs during the selected period. Comparable performance is observed between BDGIM and NeQuick-C in both time spans. During the period of low solar activities, RMS error of the IRI-2016 model is at the same level as BDGIM and NeQuick-C, while during the high solar activity condition, a notably large RMS error is found for IRI-2016. NeQuick-G exhibits worse performance in the comparison of NeQuick-G and NeQuick-C models. The correction parameters of NeQuick-G were retrieved from the navigation files collected by the IGS network in 2017, and by the international GNSS Monitoring and Assessment Service (iGMAS) network for the year 2014. Note that, NeQuick-G parameters are estimated using Galileo-derived STEC observations from 16 to 20 Galileo sensor stations (Prieto-Cerdeira et al. 2014), whereas NeQuick-C parameters are generated using GPS STEC data derived from a global network of 25 IGS receivers (Wang et al. 2019a). The difference in the performance of NeQuick-G and NeQuick-C largely relates to the different data sets and processing strategies used in the computation of the respective correction parameters.

RMS error of different correction models in comparison with the IGS-GIM in the fourth quarter of 2017 (top) and 2014 (bottom)
To check the time-dependent variation of model errors, we show in Figure 4 the monthly bias and standard deviation (STD) of differences between model-based and GIM-derived VTECs from 2010 to 2017. Top, middle and bottom plots correspond to the result of GPS ICA, NeQuick-C and BDGIM, respectively. The three correction models appear to underestimate the ionospheric VTEC, especially in the years of high solar activity. Biases of GPS ICA mainly vary within the range of −13 to 2 TECU, which are more scatted than those of BDGIM and NeQuick-C. The index of STD indicates the performance of different correction models in reproducing changes in the ionosphere while neglecting the bias. It is found that the STD index of BDGIM and NeQuick-C is at the same magnitude, which is notably smaller than that of GPS ICA across the entire period. Overall, STD errors of different correction models in high solar activity years are larger by a factor of 2–3 than those during a low level of solar conditions.

Bias and STD series of GPS ICA (top)-, NeQuick-C (middle)- and BDGIM (bottom)-based VTEC estimates relative to the IGS-GIM during 2010–2017. Dots denote the mean difference between model-based and reference VTECs of each calendar month, and the length of vertical lines describes the respective standard deviations
Using the daily RMS error of GPS ICA (RMSgps) as a reference, performance improvement or degradation (in percent) of different correction models in comparison with GPS ICA is defined through the relation
in which RMSmodel denotes the RMS error of other involved correction models compared with the reference VTECs. The generated daily percentage improvements are averaged for each calendar month and plotted in Figure 5. BDGIM enables a 24%–51% reduction in RMS errors compared to GPS ICA. There is no significant degradation in the model performance of BDGIM during different levels of solar conditions. While RMS errors of GPS ICA are significantly reduced in most of the examined time span after applying NeQuick-C and IRI-2016 for the ionospheric path delay correction, a notable drop in the index of percentage improvement is observed in 2016. Compared with GPS ICA, BDGIM can achieve an overall percentage improvement of 38.4% across the 8-year period, and the improvements of NeQuick-C and IRI-2016 reach 38.1% and 22.6%, respectively.

Improvement or degradation percentage of different correction models relative to GPS ICA in comparison with the IGS-GIM during 2010–2017
The index of relative correction capability was used in Prieto-Cerdeira et al. (2014) to assess the performance of NeQuick-G, which is designed to provide a targeted error of less than 30% of the total STEC or 20 TECU with a 68% probability over all observations. This index was also modified in the NeQuick-G performance evaluation for space-borne applications. Here, we follow the definition of relative model error as described in Montenbruck and González (2019)
to evaluate the correction capability of BDGIM on a statistical basis. The index is defined as the root sum square (RSS) of the relative error of model-based VTEC estimates over all observed/reference VTECs, based on the desired target that BDGIM can reduce the residual ionospheric vertical error to less than 25% or 8 TECU. The 32 TECU limit is selected to scale the relative error to 25% at 8 TECU, to avoid the inflated relative errors caused by small reference VTEC values during the period of low solar activities. The complementary value, i.e., \(1 - \varepsilon\), provides a description of the relative correction capability of different models to mitigate the ionospheric path delay.
The cumulative distribution of relative model errors generated by comparison with IGS-GIM VTECs, covering the whole test period, is depicted in Figure 6. It shows that BDGIM can achieve the desired relative error of less than 25% in more than 98% of the reference VTECs. The relative error of less than 25% is achieved in 99% of observed samples for NeQuick-C, 83% for IRI-2016 and 51% for GPS ICA. The correction capability of BDGIM is about two times better than that of GPS ICA. In this case, our fitted correction parameters are used to drive BDGIM.

Cumulative distribution of different correction model errors by comparison with the IGS-GIM covering the year 2010–2017. The vertical line corresponds to the targeted 25% error index
Comparison with Jason-2/3 VTEC
Altimeter VTEC observations provide an independent performance evaluation of different ionospheric models over the oceanic region. Based on the daily mean bias and standard deviation computed from the differences between model-based and Jason-derived VTECs (i.e., VTECmodel-VTECjason-2/3), we present in Figure 7 the bias and STD distributions of different correction models in comparison with Jason-2/3 VTECs during 2010–2017. BDGIM and NeQuick-C present narrower bias distributions than GPS ICA and IRI-2016. Except for NeQuick-C, the other three correction models exhibit notably negative bias deviations compared with Jason-2/3 observed VTECs. The mean biases are 0.15 TECU for NeQuick-C, -1.21 TECU for BDGIM, -2.08 TECU for IRI-2016 and -3.66 TECU for GPS ICA during the test period. Since altimeter observations do not include total electron contents present in the upper region of the ionosphere and plasmasphere, there exists a systematic bias in the order of a few TECU in altimeter-derived VTECs (Orus-Perez et al. 2002). If such a bias component was taken into account, those ionospheric models presenting higher negative biases here should have larger bias deviations, in particular in low-latitude and equatorial regions. As for the distribution of standard deviations, the mostly centered values are 5.86, 6.47, 6.64 and 8.06 TECU for BDGIM, IRI-2016, NeQuick-C and GPS ICA, respectively. The smaller STD error of BDGIM indicates a slightly better consistency between BDGIM-based and Jason-derived VTECs while neglecting the pronounced biases in Jason-derived VTEC data.

Normalized histogram of the bias (top) and STD (bottom) errors between model-based and Jason-2/3 reference VTECs during 2010–2017
Figure 8 depicts the latitudinal variation of model STD errors in a low (2017) and high (2014) solar activity year by comparison with Jason-2 observed VTECs. Obviously, model performance largely depends on the level of solar activities. STD errors of different correction models in 2014, a high level of solar condition, are 2–3 times larger than those in 2017, a year of low solar activity. Degraded model performance is observed in low-latitude regions compared with other regions. The inferior performance of different correction models in low-latitude and equatorial regions can be attributed to the pronounced ionospheric variation in the corresponding region as well as the inadequacy of model structure itself, e.g., the single-layer assumption, in the presence of large latitudinal gradients. The latitudinal gradient also affects the quality of NeQuick-C and IRI-2016 in low-latitude regions regardless of the three-dimensional nature of the two models. The hemispheric asymmetry in the latitudinal variation of RMS errors is recognized, in particular during the high solar activity period. It indicates the higher consistency between model-based and Jason-derived VTECs in the northern hemisphere than that in the southern hemisphere. Overall, BDGIM presents a comparable performance in middle-latitude regions and slightly better performance in low-latitude regions than NeQuick-C and IRI-2016 models.

Latitudinal variation of standard deviations of model-based VTEC estimates minus Jason-2 observed VTECs in 2017 (top) and 2014 (bottom). Results are generated from the daily STD value within each individual 3° latitudinal bin and averaged for the individual year
As defined in (6), the index of relative model error is also used to evaluate the quality of different ionospheric models relative to Jason-2/3 VTECs. Note that, the 29.6 TECU limit is selected in this case, considering the orbit altitude difference between Jason-2/3 altimetry and GNSS satellites. We show in Figure 9 the cumulative distribution of relative model errors obtained by comparison with Jason-2/3 observed VTECs. For BDGIM, a relative error of less than 25%, or equivalently a 75% correction, is achieved for 90% of observed samples during 2010–2017. The relative error within the desired 25% target is obtained in 80, 75 and 40% of the observations for NeQuick-C, IRI-2016 and GPS ICA, respectively. The correction capability of BDGIM increases by a factor of 2.25 compared to the Klobuchar model of GPS.

Cumulative distribution of different correction model errors by comparison with Jason-2/3 reference VTECs covering the year 2010–2017. The vertical line denotes the targeted 25% error index
The comparison of different ionospheric models to IGS-GIM- and Jason-2/3-derived VTECs is summarized in Table 1. The result is generated based on 8 years of data from 2010 to 2017. The relative RMS error here is calculated referring to the mean value of reference VTECs, i.e., RMSmod-ref/VTECref. The four correction models appear to underestimate the vertical ionospheric delay when compared to IGS-GIM-derived VTECs on global scales. As expected, GPS ICA exhibits the worst performance with a 47.5% relative RMS error. The relative RMS error is 29.1% for BDGIM, which is about 1.3% worse than NeQuick-C but 4.8% better than IRI-2016. When compared to Jason-2/3 observed VTECs over the ocean, no significant bias deviation is found for NeQuick-C, whereas the remaining three models present negative biases. BDGIM and GPS ICA show the best and worst performance in this case, with relative RMS errors of 29.6 and 41.3%, respectively. As for three-dimensional models, relative errors of NeQuick-C and IRI-2016 are around 1.9 and 4.1% larger than that of BDGIM. BDGIM enables a significant error reduction compared to GPS ICA and comparable performance with NeQuick-C. Overall, BDGIM can achieve a better than 75% correction capability for 98% of the observed samples compared to IGS-GIM VTECs and 90% compared to Jason-2/3 VTECs.
Performance during the geomagnetically disturbed period
Two separate periods were selected to assess the model performance under different levels of geomagnetic conditions, as shown in Figure 10. The first one corresponds to March 12-26, 2015, or DOY 71–85, during which period the F10.7 solar radio flux at 10.7 cm wavelength in solar flux unit (sfu, 1 sfu = 10–22Wm−2 Hz−1) varies between 108 and 137 sfu and the geomagnetic activity proxy Kp index exceeds the 4.0 threshold for two times indicating a disturbed geomagnetic condition. The second one also covers 15 days in 2015 from May 20 to June 3, or DOY 140–154, during which period F10.7 changes within the range of 95–121 sfu and Kp index does not exceed 2.0, indicating a quiet geomagnetic condition.

Variation of F10.7 and Kp index during the selected disturbed (DOY 71–85) and quite (DOY 140–154) periods in 2015
We first present in Figure 11, the analysis of different ionospheric models during the geomagnetically disturbed period, in terms of RMS errors compared with IGS-GIM and Jason-2 VTECs. A notably increased RMS error is observed in DOY 076 and 077, which keeps in proper accord with the date of Kp index exceeding the 4.0 threshold. In both comparisons, it is interesting that GPS ICA shows significant RMS errors on DOY 076, whereas IRI-2016 on DOY 077. The peak of RMS errors appears on DOY 077 for BDGIM and NeQuick-C in comparison with IGS-GIM VTECs, whereas compared to Jason-2 VTECs, the peak appears on DOY 076. Based on the results of three days ahead and after the geomagnetic event, i.e., DOY 53–75 and 78–80, the performance degradation of different models during the geomagnetic storm is examined. In the IGS-GIM VTEC assessment, the RMS error increases by 5% for GPS ICA, 15% for IRI-2016, 18% for NeQuick-C and 32% for BDGIM. In the case of the Jason-2 VTEC assessment, an increase of 10, 29, 15 and 21% is noticed in the RMS error of GPS ICA, IRI-2016, NeQuick-C and BDGIM, respectively.

RMS difference of different correction models compared with IGS-GIM (top) and Jason-2 (bottom) VTEC values during the disturbed geomagnetic condition in 2015
In the comparison of model performance during the two test periods, RMS difference of different models under disturbed conditions is more significant than that under quiet conditions. The model RMS error increases on average from 9.4 to 13.3 TECU for GPS ICA, 6.6 to 10.2 TECU for IRI-2016, 5.4 to 9.8 TECU for NeQuick-C, and 5.2 to 8.4 TECU for BDGIM. The magnitude of model RMS errors increases roughly by 42, 55, 83 and 60% for the respective models.
A global network of 50 IGS stations, which covers the high, middle and low latitudinal regions, are selected to evaluate the performance of different ionospheric models in single-frequency standard point positioning (SPP) solutions. For details on the implementation of GPS SPP solution based on L1 C/A code pseudoranges with different ionospheric corrections, we refer to Wang et al. (2018). We present in Figure 12 the dependence of 3D RMS position errors on the local time in GPS L1 C/A code-based SPP solutions. The results are generated from all test stations and averaged within each 30-minute bin for the disturbed (top panel) and quiet (bottom panel) conditions of geomagnetic activities, respectively. Without ionospheric correction, the positioning error shows a similar variation with the diurnal VTEC, which exhibits the largest errors around the local noon. The positioning errors significantly drop after applying ionospheric corrections, and the errors during the disturbed period are notably larger than those during quiet period. The positioning performance with BDGIM and NeQuick-C corrections is at a comparable level, which performs better than GPS ICA in both quiet and disturbed conditions.

GPS single-point positioning accuracy using L1 C/A code pseudoranges with different ionospheric correction models during disturbed (top) and quiet (bottom) periods. The 3D RMS position errors are computed from all involved test stations and averaged within each 30-minute local time bin
A comparison of SPP errors during the quiet and disturbed periods is shown in Figure 13. The positioning errors are calculated from the daily RMS position errors for each ionospheric model. Compared to GPS-ICA-corrected SPP solution, the positioning error is reduced by 10.7% for IRI-2016, 16.0% for NeQuick-C and 18.1% for BDGIM during the disturbed period. The RMS position errors are almost the same for IRI-2016, NeQuick-C and BDGIM during the quiet period, which is about 17.2% smaller than that of GPS ICA. In the comparison of model performance during the two test periods, the 3D positioning error under disturbed conditions increases by 17.3, 23.1, 18.2 and 16.9% for GPS ICA, IRI-2016, NeQuick-C and BDGIM, respectively.

3D RMS position errors of GPS single-point positioning using L1 C/A code pseudoranges with different ionospheric correction models during quiet and disturbed geomagnetic conditions
Summary and conclusions
Other than the modified Klobuchar model used in the regional BeiDou-2 system, the broadcast model called BDGIM is employed in BeiDou-3 to provide global ionospheric corrections. BDGIM is developed based on a simplified spherical harmonic expansion, which factorizes the vertical ionospheric delay into the product of a continuously updating part depending on the nine broadcast parameters, and a predicting part through time-, location- and periodicity-dependent empirical model. Given the limited coverage of BDGIM parameters routinely transmitted as part of the navigation message of BeiDou-3, a method for the re-estimation of BDGIM correction parameters was presented within the present study. A small set of global stations comprising of 20 GNSS receivers was selected to determine the model parameters. The performance of the derived BDGIM was assessed during the period of 2010–2017, which covers solar maximum and minimum conditions of cycle 24. BDGIM can achieve an overall correction capability of better than 75% for 98% of all observed samples compared to IGS-GIM VTECs and 90% compared to Jason-2/3 VTECs. In comparison with GPS ICA, BDGIM enables a 10–20% reduction of residual ionospheric errors. As for the involved three-dimensional models, BDGIM exhibits a comparable performance with our fitted NeQuick-C model and about 5% better than the empirical IRI-2016 model. In the analysis of BDGIM performance under disturbed and quiet geomagnetic conditions, the model RMS error increases by 60% in GIM/Jason-2 VTEC assessment, and the 3D positioning error increases by 17% in GPS SPP assessment. A pronounced degradation of model performance is confirmed during the geomagnetic storm period. Since the transmitted parameters of BDGIM are merely estimated from a regional tracking network maintained by the BeiDou ground segment, it is of interest to compare the model performance of BDGIM driven by BeiDou transmitted and our fitted parameters, which is the work we are focusing on.
References
Bilitza D, Altadill D, Truhlik V, Shubin V, Galkin I, Reinisch B, Huang X (2017) International reference ionosphere 2016: from ionospheric climate to real-time weather predictions. Space Weather 15(2):418–429
CSNO (2017a) BeiDou navigation satellite system signal in space interface control document – open service signal B1C (Version 1.0). China Satellite Navigation Office, Dec 2017
CSNO (2017b) BeiDou navigation satellite system signal in space interface control document – open service signal B2a (Version 1.0). China Satellite Navigation Office, Dec 2017
Hernández-Pajares M, Roma-Dollase D, Krankowski A, García-Rigo A, Orús-Pérez R (2017) Methodology and consistency of slant and vertical assessments for ionospheric electron content models. J Geod 91(12):1405–1414
Hoque MM, Jakowski N (2015) An alternative ionospheric correction model for global navigation satellite systems. J Geod 89(4):391–406
Hoque MM, Jakowski N, Berdermann J (2017) Ionospheric correction using NTCM driven by GPS Klobuchar coefficients for GNSS applications. GPS Solut 21(4):1563–1572
Hoque MM, Jakowski N, Orús-Pérez R (2019) Fast ionospheric correction using Galileo Az coefficients and the NTCM model. GPS Solut. https://doi.org/10.1007/s10291-019-0833-3
Jakowski N, Hoque MM, Mayer C (2011) A new global TEC model for estimating transionospheric radio wave propagation errors. J Geod 85(12):965–974
Klobuchar JA (1987) Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans Aero Electron Syst 23(3):325–331
Li Z, Yuan Y, Li H, Ou J, Huo X (2012) Two-step method for the determination of the differential code biases of COMPASS satellites. J Geod 86(11):1059–1076
Montenbruck O, González Rodríguez B (2019) NeQuick-G performance assessment for space applications. GPS Solut. https://doi.org/10.1007/s10291-019-0931-2
Nava B, Coïsson P, Radicella SM (2008) A new version of the NeQuick ionosphere electron density model. J Atmos Sol-terr Phy 70(15):1856–1862
Orus-Perez R, Hernández-Pajares M, Juan J, Sanz J, García-Fernández M (2002) Performance of different TEC models to provide GPS ionospheric corrections. J Atmos Sol-terr Phy 64(18):2055–2062
Orus-Perez R (2016) Ionospheric error contribution to GNSS single-frequency navigation at the 2014 solar maximum. J Geod 91(4):397–407
Orus-Perez R, Parro-Jimenez JM, Prieto-Cerdeira R (2018) Status of NeQuick G after the solar maximum of cycle 24. Radio Sci 53(3):257–268
Prieto-Cerdeira R, Orus-Peres R, Breeuwer E, Lucas-Rodriguez R, Falcone M (2014) Performance of the Galileo single-frequency ionospheric correction during in-orbit validation. GPS World 25(6):53–58
Roma-Dollase D, Hernández-Pajares M, Krankowski A, Kotulak K, Ghoddousi-Fard R, Yuan Y, Li Z, Zhang H, Shi C, Wang C (2018) Consistency of seven different GNSS global ionospheric mapping techniques during one solar cycle. J Geod 92(6):691–706
Wang N, Yuan Y, Li Z, Huo X (2016) Improvement of Klobuchar model for GNSS single-frequency ionospheric delay corrections. Adv Space Res 57(7):1555–1569
Wang N, Yuan Y, Li Z, Montenbruck O, Tan B (2016) Determination of differential code biases with multi-GNSS observations. J Geod 90(3):209–228
Wang N, Yuan Y, Li Z, Li Y, Huo X, Li M (2017) An examination of the Galileo NeQuick model: comparison with GPS and JASON TEC. GPS Solut 21(2):605–615
Wang N, Li Z, Li M, Yuan Y, Huo X (2018) GPS, BDS and Galileo ionospheric correction models: an evaluation in range delay and position domain. J Atmos Sol-terr Phy 170:83–91. https://doi.org/10.1016/j.jastp.2018.02.014
Wang N, Li Z, Huo X, Li M, Yuan Y, Yuan C (2019) Refinement of global ionospheric coefficients for GNSS applications: methodology and results. Adv Space Res 63(1):343–358
Wang N, Li Z, Yuan Y, Li M, Huo X, Yuan C (2019) Ionospheric correction using GPS Klobuchar coefficients with an empirical night-time delay model. Adv Space Res 63(2):886–896
Wang N, Li Z, Montenbruck O, Tang C (2019) Quality assessment of GPS, Galileo and BeiDou-2/3 satellite broadcast group delays. Adv Space Res 64(9):1764–1779
Wang N, Li Z, Duan B, Hugentobler U, Wang L (2020) GPS and GLONASS observable-specific code bias estimation: comparison of solutions from the IGS and MGEX networks. J Geod. https://doi.org/10.1007/s00190-020-01404-5
Wu X, Hu X, Wang G, Zhong H, Tang C (2013) Evaluation of COMPASS ionospheric model in GNSS positioning. Adv Space Res 51(6):959–968
Yang Y, Mao Y, Sun B (2020) Basic performance and future developments of BeiDou global navigation satellite system. Satell Navig. https://doi.org/10.1186/s43020-019-0006-0
Yuan Y, Huo X, Ou J (2005) Development of a new GNSS broadcast ionospheric time delay correction model (IGGSH). In: Proceedings of the International Symposium on GPS/GNSS, December 8–10, Hong Kong
Yuan Y, Huo X, Ou J, Zhang K, Yanju C, Debao W (2008) Refining the Klobuchar ionospheric coefficients based on GPS observations. IEEE Trans Aero Electron Syst 44(4):1498–1510
Yuan Y, Li Z, Huo X, Wang N (2014) A next-generation broadcast model (BDSSH) and its implementation scheme of ionospheric time delay correction for BDS/GNSS. In: Proceedings of the ION GNSS+ 2014, September 8–12, Tampa
Yuan Y, Wang N, Li Z, Huo X (2019) The BeiDou global broadcast ionospheric delay correction model (BDGIM) and its preliminary performance evaluation results. Navigation 66(1):55–69
Zhu Y, Tan S, Zhang Q, Ren X, Jia X (2019) Accuracy evaluation of the latest BDGIM for BDS-3 satellites. Adv Space Res 64(6):1217–1224
Acknowledgments
The authors acknowledge the Crust Movement Observation Network of China (CMONOC) and International GNSS Service (IGS) for providing GNSS data. This work was supported by the National Key Research Program of China (2017YFGH002206), the National Natural Science Foundation of China (42074043), the Alliance of International Science Organizations (ANSO-CR-KP-2020-12), the Youth Innovation Promotion Association and Future Star Program of the Chinese Academy of Sciences. The source codes of BDGIM are available from the first author (wangningbo@aoe.ac.cn) on request.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, N., Li, Z., Yuan, Y. et al. BeiDou Global Ionospheric delay correction Model (BDGIM): performance analysis during different levels of solar conditions. GPS Solut 25, 97 (2021). https://doi.org/10.1007/s10291-021-01125-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-021-01125-y