
Abstract
In this paper, the problem of exponential H ∞ output tracking control is addressed for a class of switched neutral system with time-varying delay and nonlinear perturbations. The considered system consists of different neutral and discrete delays. By resorting to the average dwell time approach, a new Lyapunov–Krasovskii functional is proposed to establish sufficient conditions for the exponential stability and H ∞ performance of switched neutral systems. Then, the problem of exponential H ∞ output tracking control is investigated, an explicit expression for the desired exponential tracking controller is also given. Finally, a numerical example is provided to demonstrate the potential effectiveness of the proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Studies on dynamic systems with complicated switching law which are called switched systems have arisen in various disciplines of science and engineering in recent years [1, 2, 4, 6, 19, 27, 28]. Switched system usually consists of a family of subsystems and a switching signal. Many real-world processes and systems can be modeled as switched systems, such as power electronics, embedded systems, networked control systems, chemical processes, computer-controlled systems, automotive industry, etc.
It is well known that time delay can be encountered in various industrial systems and may be a main source of instability and poor performance of a control system. Thus, the stability of time-delay systems has been widely considered by many researchers [8, 23, 25, 26, 31]. Neutral system as a special class of time-delay systems appears in many dynamic systems, which depends on the delays of state and state derivative. Some practical examples of neutral systems include distributed networks, heat exchanges, and processes including steam [20]. In view of the strong engineering background, switched neutral systems have attracted special attention during the past decade. Some useful results have been reported in the literature (see, e.g. [3, 5, 7, 9, 21] and the references therein), primarily on the investigation of stability.
Tracking control, which can be divided into state tracking and output tracking, is an important issue in control field and has wide applications in dynamic processes in industry, economics, and biology. The main objective of output tracking control is trying to minimize the error between the output of the plant and the output of a given reference model via a designed controller [32]. The problem of H ∞ output tracking control for neutral systems with time-varying delay and nonlinear perturbations was investigated in [33, 34], and provided a less conservative result than one in the reference [32]. The issue of robust output feedback tracking control for time-delay nonlinear systems using neural network is studied in [12], where the reference signal is a given continuous bounded signal.
On the other hand, with the great development of the switched system theory, the tracking control problems of switched systems have received increasing attention in the last few years. In addition, the importance of the study of tracking control for switched systems with time-delay arises from the extensive applications in robot tracking control [22]. The issue of observer-based state tracking control and robust state tracking control for switched linear systems with time-varying delay was investigated in [15, 18], respectively. Li et al. investigated the robust tracking control problem for switched linear systems with time-varying delays and some sufficient conditions for the solvability of the robust tacking control problem were developed in [17]. In [16], the output tracking control problem for switched linear time-varying delayed systems with stabilizable and unstabilizable subsystems is investigated and some sufficient conditions for the solvability of the tracking control problem are developed. Hou et al. considered the problem of exponential l 2−l ∞ output tracking control for discrete-time switched system with time-varying delay in [11], where a class of discrete-time state feedback tracking controllers was constructed. However, the aforementioned papers on the tracking problem focus mainly on the switched time-delay systems. It is well known that neutral systems play a very important role in time-delay systems. To the best of the authors’ knowledge, the problem of tracking control of switched neutral systems with time delay has not been investigated, and this constitutes the main motivation of the present study.
In this paper, we are interested in investigating the exponential H ∞ output tracking control for switched neutral system with time-varying delay and nonlinear perturbations. By resorting to the average dwell time approach and Newton–Leibniz formula, sufficient conditions for exponential stability and H ∞ performance of switched systems with time delay are derived. Then, the problem of exponential H ∞ output tracking control is investigated. Finally, a numerical example is provided to demonstrate the potential and effectiveness of the proposed method. Compared with the previous results, the proposed results have the following highlights: (1) a new Lyapunov functional candidate is constructed to investigate exponential stability and H ∞ performance; (2) the nonlinear perturbation in this paper is quite general that include the usual Lipschitz conditions as a special case; (3) the exponential H ∞ performance is firstly introduced to study the output tracking problem of switched neutral systems.
Notations
Throughout this paper, the superscript “T” denotes the transpose, and the symmetric terms in a matrices are denoted by *. The notation X>0 (X≥,<,≤0) means that X is a positive definite (positive semi-definite, negative definite, semi-negative definite, respectively). R n denotes the n dimensional Euclidean space. ∥x(t)∥ denotes the Euclidean norm. L 2[0,∞) is the space of square integrable functions on [0,∞). λ max(P) and λ min(P) denote the maximum and minimum eigenvalues of matrix P, respectively. I is an identity matrix with appropriate dimension. Matrices, if not explicitly stated, are assumed to have compatible dimensions.
2 Problem Formulation and Preliminaries
Consider the following switched neutral systems with time-varying delay:

where x(t)∈R n, u(t)∈R p, and z(t)∈R q are the state vector, input and output, respectively, w(t)∈R l is the noise input which is assumed to belong to L 2[t 0,∞),τ 1,τ 2 denotes the constant delay, d(t) denotes the time-varying state delay satisfying

with d and h being positive constant numbers, H=max{τ 1,τ 2,d,h},φ(θ) is a continuous vector-valued initial function. The function \(\sigma(t):[ t_{0}, \infty) \to\underline{N} = \{ 1,2, \ldots, N \}\) is the switching signal which is deterministic, piecewise constant and right continuous, corresponding to it, the switching sequence \(\sigma(t):\{ (t_{0},\sigma(t_{0})), (t_{1},\sigma(t_{1})), \ldots,(t_{k},\sigma(t_{k})) \ldots\},\sigma(t_{k}) \in\underline{N} ,k = 0,1, \ldots\,\), where t 0 is the initial time, and t k denotes the kth switching instant of the system. Moreover, σ(t)=i means that the ith subsystem is activated. N denotes the number of the subsystems. \(A_{i},B_{i},C_{i},D_{i},E_{i},C_{1i},C_{2i},D_{1i}, i \in\underline{N}\), are known constant matrices with appropriate dimensions. In addition, f i (⋅):R n→R n is nonlinear function satisfying
where Θ 1i ,Θ 2i are known real constant matrices.
Remark 1
The nonlinear function f i (x) satisfies the so-called sector condition in the sense that f i (x) belongs to the sector [Θ 1i ,Θ 2i ] (see Ref. [13]). Such a sector description is quite general and includes the usual Lipschitz conditions as a special case, and also covers several other classes of well-studied nonlinear systems (see the reference [10, 14]).
The reference model is given as
where z r (t)∈R q,x r (t)∈R n is the reference state and r(t) is energy bounded reference input belonging to L 2[t 0,∞),A r is a Hurwitz matrix with appropriate dimensions.
Here, we are interested in designing a state feedback controller described by the following equation:
where K 1σ(t) and K 2σ(t) are controller gain matrices. Applying this controller to system (1)–(3), results in the following closed-loop system:


where \(\hat{A}_{\sigma (t)} = A_{\sigma (t)} + D_{\sigma (t)}K_{1\sigma (t)},\hat{D}_{\sigma (t)} = D_{\sigma (t)}K_{2\sigma (t)}\),
Let \(\xi(t) = [ \begin{array}{c@{\quad}c} x^{T}(t) & x_{r}^{T}(t) \\\end{array} ]^{T},v(t) = [ \begin{array}{c@{\quad}c} w^{T}(t) & r^{T}(t) \\\end{array} ]^{T},e(t) = z(t) - z_{r}(t),y(t) = \dot{\xi} (t)\), we obtain the following augmented switched system:

where

Denote

then we have \(\bar{A}_{\sigma (t)} = \tilde{A}_{\sigma (t)} + \tilde{D}_{\sigma (t)}K_{\sigma (t)},\bar{C}_{1\sigma (t)} = \tilde{C}_{1\sigma (t)} + D_{1\sigma (t)}K_{\sigma (t)}\), and the controller (8) can be rewritten as
Before moving on to the next section, we need the following definitions.
Definition 1
The system (1)–(3) with w(t)≡0 is said to be exponentially stabilizable under the controller u(t) and the switching signal σ(t), if its solution satisfies \(\| x(t) \| \le\alpha\| x(t_{0}) \|e^{ - \beta (t - t_{0})}\), where α≥1,β>0,t≥t 0.
Definition 2
For any T 2>T 1>0, let N σ (T 1,T 2) denote the switching number of σ(t) on an interval (T 1,T 2), if

holds for given N 0≥0,τ a >0. Then the constant τ a is called the average dwell time and N 0 is the chatter bound.
Remark 2
The concept of average dwell time was originally proposed for continuous-time switched systems by Hespanha and Morse (see Ref. [19]), which has been shown to be an effective tool for the stability analysis of switched systems. As commonly used in the literature, we choose N 0=0 in this paper.
Definition 3
Consider system (11)–(12), if the following conditions hold.
- (1)
-
(2)
Under zero initial conditions, i.e. x(t)=0,x r (0)=0,t∈[−H,0], the system (11)–(12) satisfies \(\int_{t_{0}}^{\infty} e^{ - \alpha (t - t_{0})}e^{T}(t)e(t)\,dt \le\gamma^{2}\int_{t_{0}}^{\infty} v^{T}(t)v(t)\,dt\) when v(t)≠0.
Then system (11)–(12) is said to have exponential H ∞ performance γ, where α,γ>0 are positive constants.
Remark 3
The exponential H ∞ performance index was introduced for switched systems in [29] and was extended in [24]. In fact, the concept of exponential H ∞ performance index in the form of \(\sum_{s = k_{0}}^{\infty} (1 - \alpha)^{s}z^{T}(s)z(s) \le\sum_{s = k_{0}}^{\infty} \gamma^{2}w^{T}(s)w(s)\) is proposed for the discrete-time switched linear systems (see Definition 3 in [30]). In this paper, we modify the definition to adapt the tracking problem in switched neutral systems.
If there exists a state feedback controller (8) such that the resulting augmented switched system (11)–(12) is exponentially stable with an exponential H ∞ performance γ, then the controller (8) is said to be an exponential H ∞ output tracking controller.
The objective of this paper is to design an exponential H ∞ output tracking controller (8) such that system (11)–(12) is exponentially stable with an exponential H ∞ performance γ.
3 Main Results
3.1 Exponential Stability and H ∞ Performance Analysis
This subsection focuses on the analysis of the exponential stability and H ∞ output tracking performance.
Theorem 1
Consider the augmented system (11)–(12) with v(t)=0, if there exist positive definite matrices P i ,Q i ,R i ,S i ,T i >0, any matrices N i ,M i and scalar α>0 such that the following matrix inequality holds:

and the average dwell time satisfies

then the system is exponentially stable, where

and μ≥1 satisfying

Proof
For the ith subsystem, we define a Lyapunov functional candidate of the form
with
which is positive definite since P i ,Q i ,R i ,S i ,T i are positive definite matrices.
Along the trajectories of system (11) and (12), we have





It follows from the Newton–Leibniz formula that

Then for any matrices N i ,M i we have

The inequality (5) can be written as

Then combining (19)–(26) with v(t)=0, we have

where

and

Note that

By the Schur complement, (15) implies

Thus, it follows from (27)–(29) that

According to (17) and (18), we have

From (30)–(31) and k=N σ (t 0,t)≤(t−t 0)/τ a , for any t∈[t k ,t k+1), we have

Moreover, we obtain

Here

and

Therefore

By Definition 1, we know that system (11) and (12) is exponentially stable. This completes the proof. □
Now we are in a position to present the following theorem on the exponential H ∞ output tracking performance analysis.
Theorem 2
Consider the augmented system (11)–(12), if there exist positive definite matrices P i ,Q i ,R i ,S i ,T i >0, any matrices N i ,M i and scalar α>0 such that the following matrix inequality holds:

and the average dwell time satisfies (16), then the system (11)–(12) is exponentially stable with an exponential H ∞ output tracking performance γ. Here \(\phi_{11i}, \phi_{12i}, \phi_{22i}, \bar{\varTheta}_{1i}, \bar{\varTheta}_{2i}\) are given in (17).
Proof
From Theorem 1, we know that system (11)–(12) is exponentially stable with v(t)=0. In the sequel, we shall prove that the exponential H ∞ disturbance attenuation performance of system (11)–(12) is guaranteed for all nonzero v(t)∈L 2[t 0,∞) under the zero initial condition.
By (19)–(26), and using the same method in Theorem 1, we can obtain

when \(t \in[ \begin{array}{c@{\quad}c} t_{k} & t_{k + 1} \end{array} )\), the following matrix inequalities hold:

Let Δ(s)=e T(s)e(s)−γ 2 v T(s)v(s), from (18), (31) and (37), for \(t \in[ \begin{array}{c@{\quad}c} t_{k} & t_{k + 1} \end{array} )\), we have

Under zero initial conditions i.e. V(t 0)=0, (38) becomes

Multiplying both sides of (39) by \(e^{ - N_{\sigma} (t_{0},t)\ln \mu}\) yields

Note that N σ (t 0,s)≤(s−t 0)/τ a , and τ a >lnμ/α, we have

Therefore it follows from (40) and (41) that

Integrating both sides of (42) from t=t 0 to ∞ leads to

This means that system (11) and (12) achieves exponential H ∞ output tracking performance γ. This completes the proof. □
Remark 4
When μ=1 in (16), we have \(\tau_{a}^{*} = 0\), which implies that switching signals can be arbitrary.
Remark 5
Compared with the existing results, the proposed sufficient conditions are more general due to that the proposed Lyapunov–Krasovskii functional candidate includes the time-varying delay term d(t).
3.2 Exponential H ∞ Output Tracking Controller Design
In this subsection, we will solve the exponential H ∞ output tracking controller design problem.
Theorem 3
Consider system (1)–(3), there exists a state feedback controller of the form (13), such that the augmented closed-loop system (11)–(12) achieves the exponential H ∞ output tracking performance γ, if there exist matrices positive definite \(\bar{P}_{i} > 0,\bar{Q}_{i} > 0,\bar{R}_{i} > 0,\bar{S}_{i} > 0, T_{i} > 0\), any matrices \(\bar{N}_{i}, \bar{M}_{i},X_{i}\), and positive scalars α,γ>0 satisfying

where

and the average dwell time of the system satisfies (16), μ≥1 satisfying

Moreover, the gain matrices of a desired controller of the form (13) are given by

Proof
Performing a congruence transformation to (35) by \(\mathit{diag}\{ P_{i}^{ - 1},P_{i}^{ - 1},P_{i}^{ - 1},I,I,I,I,P_{i}^{ - 1},I,I \}\), denoting \(X_{i} = K_{i}\bar{P}_{i}\), together with the change of matrix variables defined by

and by the Schur complement, we find that (47) holds:

where \(\bar{\varPhi}_{11i} = \bar{P}_{i}\tilde{A}_{i}^{T} + \tilde{A}_{i}\bar{P}_{i} + \bar{R}_{i} + \alpha\bar{P}_{i} + \bar{N}_{i} + \bar{N}_{i}^{T} + X_{i}^{T}\tilde{D}_{i}^{T} + \tilde{D}_{i}X_{i} - \bar{P}_{i}\frac{\bar{\varTheta}_{1i}^{T}\bar{\varTheta}_{2i} + \bar{\varTheta}_{2i}^{T}\bar{\varTheta}_{1i}}{2}\bar{P}_{i}\).
Noticing that \(\bar{S}_{i},\bar{Q}_{i} > 0\), we have \((\bar{S}_{i} - \bar{P}_{i})\bar{S}_{i}^{ - 1}(\bar{S}_{i} - \bar{P}_{i}) \ge 0, (Q_{i} - \bar{P}_{i})\bar{Q}_{i}^{ - 1}(\bar{Q}_{i} - \bar{P}_{i}) \ge 0\) and \((\bar{\varTheta}_{1i} + \bar{\varTheta}_{2i})^{T}(\bar{\varTheta}_{1i} + \bar{\varTheta}_{2i}) \ge 0\), which are equivalent to



By combining (47)–(50), we readily obtain Theorem 3. This completes the proof of Theorem 3. □
Remark 6
From Theorem 3, it is easy to see that a smaller α will be favorable to the solvability of inequalities (44). On the contrary, a larger α is more desirable to relax τ a . Considering these, we can first select a smaller α to guarantee the feasible solution of inequalities (44), and then increase α to obtain the suitable α and τ a .
4 Numerical Example
In this section an example is given to illustrate the effectiveness of the proposed approach. Consider switched system (1)–(3) and reference system (6)–(7) with parameters as follows.
Subsystem 1:

Subsystem 2:


Reference system:
It is assumed that α=0.5,τ 1=0.3,τ 2=0.2,γ=1,d(t)=0.1+0.1sin(t), from (4) we can get d=0.2,h=0.1. The nonlinear functions \(f_{1}(x) = f_{2}(x) = [ \begin{array}{c@{\quad}c} f_{a}^{T}(x) & f_{b}^{T}(x) \end{array} ]^{T}\) with
It is easy to verify that
Solving the matrix inequalities in Theorem 3, we obtain
Then, according to (17), we can get μ=4, then \(\tau_{a}^{ *} = 2.7726\). In addition, the initial value of system (1)–(3) is assumed to be \(x(0) = [ \begin{array}{c@{\quad}c} 0.5 & - 0.5 \end{array} ]^{T}\), and the initial condition of reference model (6)–(7) is assumed to be \(x_{r}(0) = [ \begin{array}{c@{\quad}c} 0.1 & - 0.2 \end{array} ]^{T}\).
In the sequel, two kinds of reference signal r(t) are utilized to demonstrate the tracking results.
Case I: Sinusoidal reference signal
Let
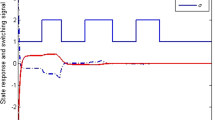
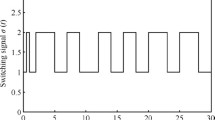
Obviously, we have v(t)∈L 2[0,∞). The switching signal σ(t) with average dwell time τ a =3 is shown in Fig. 1. The curves of output z(t) and z r (t) are shown in Fig. 2 under the sinusoidal signal. Figure 3 shows the error between the output of the system and the reference signal.

Switching signal

Output z(t) and z r (t) under case I

Tracking error under case I
Case II: Step reference signal
Let
The curves of output z(t) and z r (t) are shown in Fig. 4. Figure 5 shows the error between the output of the system and the reference signal.

Output z(t) and z r (t) under case II

Tracking error under case II
It can be observed from Figs. 1–5 that the designed controller can guarantee the exponential stability and H ∞ output tracking performance of the closed-loop system. This shows the effectiveness of the proposed design method.
5 Conclusions
In this paper, the problem of exponential H ∞ output tracking control of switched neutral system with time-varying delay and nonlinear perturbations has been addressed. A new exponential stability criterion has been obtained. Furthermore, the desired exponential H ∞ output tracking controller has been designed. A numerical example was provided to show the effectiveness of the obtained results.
References
L.I. Allerhand, U. Shaked, Robust stability and stabilization of linear switched systems with dwell time. IEEE Trans. Autom. Control 56(2), 381–386 (2011)
M.S. Branicky, Multiple Lyapunov functions and other analysis tools for switched and hybrid systems. IEEE Trans. Autom. Control 43(4), 475–482 (1998)
L. Crocco, Aspects of combustion stability in liquid propellant rocket motors, part I: fundamentals low frequency instability with monopropellants. J. Am. Rocket Soc. 21, 163–178 (1951)
D. Du, B. Jiang, P. Shi, S. Zhou, H ∞ filtering of discrete-time switched systems with state delays via switched Lyapunov function approach. IEEE Trans. Autom. Control 52(8), 1520–1525 (2007)
K.K. Fan, C.H. Lien, J.G. Hsieh, Asymptotic stability for a class of neutral systems with discrete and distributed time delays. J. Optim. Theory Appl. 114(3), 705–716 (2002)
N.H. El Farral, P. Mhaskar, P.D. Christofides, Output feedback control of switched nonlinear systems using multiple Lyapunov functions. Syst. Control Lett. 54(1), 1163–1182 (2005)
Y.A. Fiagbedzi, A.E. Pearson, A multistage reduction technique for feedback stabilizing distributed time-lag systems. Automatica 23(3), 311–326 (1987)
Q.L. Han, On stability of linear neutral systems with mixed time delays: a discretized Lyapunov functional approach. Automatica 41(7), 1209–1218 (2005)
Q.L. Han, A descriptor system approach to robust stability of uncertain neutral systems with discrete and distributed delays. Automatica 40(10), 1791–1796 (2004)
Q.L. Han, Absolute stability of time-delay systems with sector-bounded nonlinearity. Automatica 41(12), 2171–2176 (2005)
L. Hou, G. Zong, Y. Wu, Y. Cao, Exponential l 2−l ∞ output tracking control for discrete-time switched system with time-varying delay. Int. J. Robust Nonlinear Control (2011). doi:10.1002/rnc.1743
C. Hua, X. Guan, P. Shi, Robust output feedback tracking control for time-delay nonlinear systems using neural network. IEEE Trans. Neural Netw. 17(2), 495–505 (2007)
H.K. Khalil, Nonlinear Systems (Upper Saddle River, Prentice-Hall, 1996)
J. Lam, H. Gao, S. Xu, C. Wang, H ∞ and L 2/L ∞ model reduction for system input with sector nonlinearities. J. Optim. Theory Appl. 125(1), 137–155 (2005)
Q.K. Li, G.M. Dimirovski, J. Zhao, Robust tracking control for switched linear systems with time-varying delays, in Proceedings of the American Control Conference, Westin Seattle Hotel, Seattle, WA, USA (2008), pp. 1576–1581
Q.K. Li, G.M. Dimirovski, J. Zhao, Tracking control for switched time-varying delays systems with stabilizable and unstabilizable subsystems. Nonlinear Anal. Hybrid Syst. 3(2), 133–142 (2009)
Q.K. Li, J. Zhao, G.M. Dimirovski, Robust tracking control for switched linear systems with time-varying delays. IET Control Theory Appl. 2(6), 449–457 (2008)
Q.K. Li, J. Zhao, X.J. Liu, G.M. Dimirovski, Observer-based tracking control for switched linear systems with time-varying delay. Int. J. Robust Nonlinear Control 21(3), 309–327 (2011)
D. Liberzon, Switching in Systems and Control (Birkhäuser, Basel, 2003)
C.H. Lien, K.W. Yu, Non-fragile H ∞ control for uncertain neutral systems with time-varying delays via the LMI optimization approach. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 37(2), 493–499 (2007)
C.H. Lien, K.W. Yu, J.G. Hsieh, Stability conditions for a class of neutral systems with multiple time delays. J. Math. Anal. Appl. 245(1), 20–27 (2000)
Z.H. Qu, J. Dorsey, Robust tracking control of robots by a linear feedback law. IEEE Trans. Autom. Control 36(9), 1081–1084 (1991)
J.P. Richard, Time-delay systems: an overview of some recent advances and open problems. Automatica 39(10), 1667–1694 (2003)
X.M. Sun, J. Zhao, D.J. Hill, Stability and L 2-gain analysis for switched delay systems: a delay-dependent method. Automatica 42(5), 1769–1774 (2006)
Z. Wang, W.C.H. Daniel, Filtering on nonlinear time-delay stochastic systems. Automatica 39(1), 101–109 (2003)
S. Xu, T. Chen, Robust H ∞ control for uncertain discrete-time systems with time-varying delays via exponential output feedback controllers. Syst. Control Lett. 51(3–4), 171–183 (2004)
L. Yu, S. Fei, X. Li, Robust adaptive neural tracking control for a class of switched affine nonlinear systems. Neurocomputing 73(10–12), 2274–2279 (2010)
L. Yu, S. Fei, H. Zu, X. Li, Direct adaptive neural control with sliding mode method for a class of uncertain switched nonlinear systems. Int. J. Innov. Comput., Inf. Control 6(12), 5609–5618 (2010)
G.S. Zhai, B. Hu, K. Yasuda, A.N. Michel, Disturbance attenuation properties of time-controlled switched systems. J. Franklin Inst. 338(7), 765–779 (2001)
L.X. Zhang, E.K. Boukas, P. Shi, Exponential H ∞ filtering for uncertain discrete-time switched linear systems with average dwell time: a μ-dependent approach. Int. J. Robust Nonlinear Control 18(11), 1188–1207 (2008)
X.M. Zhang, Q.L. Han, Stability analysis and H ∞ filtering for delay differential systems of neutral type. IET Control Theory Appl. 1(3), 749–755 (2007)
D. Zhang, L. Yu, H ∞ output tracking control for neural systems with time-varying delay and nonlinear perturbations. Commun. Nonlinear Sci. Numer. Simul. 15(11), 3284–3292 (2010)
X.Q. Zhao, Y.Z. Liu, G.X. Zhong, M. Zhao, A less conservative result of H ∞ output tracking control for neutral systems with time-varying delay and nonlinear perturbations, in Proceedings of the Chinese Control and Decision Conference, Mianyang, 23–25 (2011), pp. 509–514
G.X. Zhong, Z.D. Xu, H.M. Wang, H ∞ output tracking control for neutral systems with time-varying delay and nonlinear perturbations: an LMI approach, in Proceedings of the Chinese Control and Decision Conference, Mianyang, 23–25 (2011), pp. 544–549
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Grant No. 60974027 and NUST Research Funding (2011YBXM26).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Liu, S., Xiang, Z. Exponential H ∞ Output Tracking Control for Switched Neutral System with Time-Varying Delay and Nonlinear Perturbations. Circuits Syst Signal Process 32, 103–121 (2013). https://doi.org/10.1007/s00034-012-9450-x
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-012-9450-x