
Abstract
This paper deals with the stability of nonlinear continuous-time positive systems with delays represented by the Takagi–Sugeno (T-S) fuzzy model. A simpler sufficient condition of stability based on linear copositive Lyapunov functional (LCLF) is derived which is not relevant to the magnitude of delays. Based on the result of stability, the problem of controller design via the so-called parallel distributed compensation (PDC) scheme is solved. The control is under a positivity constraint, which means that the resulting closed-loop systems are not only stable, but also positive. Constrained positive control is also considered, further requiring that the trajectory of the closed-loop system is bounded by a prescribed boundary if the initial condition is bounded by the same boundary. The stability results are formulated as linear programs (LPs) and linear matrix inequalities (LMIs), and the control laws can be obtained by solving a set of bilinear matrix inequalities (BMIs). A numerical example and a real plant are studied to demonstrate the efficiency of the proposed method.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Many physical systems in the real world involve variables that are nonnegative, e.g., population levels, absolute temperature and concentration of substances. Such systems are referred to as positive systems [1, 4, 6], which means that their states and output are nonnegative whenever the initial conditions and input are nonnegative, and have numerous applications in areas such as economics, biology, sociology, and communications. The states of positive systems are confined within a cone located in the positive orthant rather than in the whole space. This feature makes analysis and synthesis of positive systems a challenging and an interesting job [1, 12, 18]. However, due to the difficulty of nonlinearity [13], some key results in linear positive systems are not applied to nonlinear positive systems. For example, the key Lemma 4 which is widely used to obtain the desirable results in [15] cannot apply to nonlinear system. Thus, there is rare research on nonlinear positive systems [14, 15].
The T-S fuzzy model suggests an efficient way to represent complex nonlinear systems by fuzzy sets and fuzzy reasoning. In the past two decades, fuzzy systems of the Takagi–Sugeno (T-S) model [7, 20] have attracted great interest from the control community, then the issue of stability and controller synthesis of fuzzy systems has been studied extensively [5, 21]. Recently, some authors in [2, 3] use the discrete-time T-S fuzzy model to investigate the stability and stabilization of discrete-time nonlinear positive systems based on quadratic Lyapunov functions.
It is well known that time delays appear in many practical control systems. Since time delays usually result in unsatisfactory performance and are frequently a source of instability, their presence must be taken into account in practical analysis and synthesis of systems. However, to the best of our knowledge, up to now, there has been no literature studying the problems of the stability and the constrained control of fuzzy positive systems with delays. Since fuzzy positive systems with delays are a special class of delayed fuzzy systems, the relevant methods applicable to delayed fuzzy systems are also suitable for fuzzy positive systems with delays. These methods, such as the popular quadratic Lyapunov–Krasovskii functional (QLKF) used in [10], however, generally fail to capture the nature of a positive system. When the stability of positive systems is considered, it is natural to adopt the LCLF. The approach of LCLF relies on the following fact: a positive system is stable if there is a function V(x) that is positive definite and its derivative (for continuous-time systems) or difference (for discrete-time systems) taken along the system’s trajectories is negative definite when x is in the positive orthant. This approach captures the nature of positivity and has been shown to be a powerful tool for treating positive systems. As pointed out in [11, 17], using the LCLF, we can get the sufficient and necessary stability conditions both for continuous-time and discrete-time positive linear systems with delays and their stability is not affected by the magnitude of delays. This motivates us to utilize the LCLF in stability analysis and constrained controller design, which will make the results less conservative and the computation less demanding.
To get more elegant results as positive linear systems, we will not adopt the popular quadratic Lyapunov–Krasovskii functional (QLKF) as widely used in [10] to analyze the fuzzy positive system with delays, while a new LCLF is constructed. In terms of constrained control, the controller should satisfy two conditions: (1) the closed-loop systems are positive and asymptotically stable, (2) the closed-loop systems are bounded by a prescribed boundary. In fact, constrained controller design for general systems has been extensively studied in the past years. And recently, [19] discussed positivity control (i.e., controller design under the positivity constraint) of positive linear systems without delays. Reference [16] investigated positivity control of discrete-time positive linear systems with delays.
The main contribution of this paper lies in the following aspects. First, a less conservative sufficient condition of stability is obtained based on LCLF compared with the result based on QLKF. Second, a sufficient condition is provided, which determines the existence of a controller that makes the closed-loop systems to be stable, positive and their states are bounded by a prescribed boundary, if the initial condition is bounded by the same boundary. Moreover, the stability checking results can be obtained by solving a set of linear matrix inequalities (LMIs) or linear programs (LPs), and the control laws can be cast in the form of solutions of a set of BMIs [8] that are numerically tractable with commercially available software.
The rest of this paper is organized as follows. System descriptions and preliminaries are presented in Sect. 2. Stability analysis of fuzzy positive systems with delays is presented in Sect. 3. Section 4 is devoted to constrained control of positive delayed fuzzy systems. In Sect. 5, a numerical example and a real plant are studied to demonstrate effectiveness of our results. Finally, conclusions are given in Sect. 6.
The following notation of matrices and vectors will be used throughout this paper: P>0(P<0) stands for a square positive define matrix (square negative define matrix). I is the identity matrix with appropriate dimensions. \(\underline{p} = \{1,2, \ldots, {p}\}\) with p∈N, \(\underline{p}_{0} = \{0\} \cup \underline{p}\). For two vectors x,y∈R n,x⪯y if x i ≤y i , i=1,2,…,n, and x≺y if x i <y i , i=1,2,…,n. The definition is similarly applied to matrices: A⪰B or A≻B where A,B∈R n×m.
2 System Descriptions and Preliminaries
Takagi and Sugeno have proposed a fuzzy model to represent nonlinear systems. This fuzzy dynamic model is described by fuzzy IF-THEN rules which represent local linear input-output relations of a nonlinear system. It is proved that the Takagi–Sugeno fuzzy model is a universal approximator.
Now consider the following fuzzy model system described by its ith rule as follows:
Plant rule i, \({i}\in{\underline{r}}\)
IF z 1(t) is M i1 and … and z e (t) is M ie THEN,
where z 1(t),z 2(t),…,z e (t) are the premise variables, and M ip (p=1,2,…,e) are fuzzy sets, x(t)∈R n is the state vector of the fuzzy system, x(t−τ l )∈R n is the delay state vector with delays: 0<τ 1<⋯<τ d ,u(t)∈R q is the control signal. A il ∈R n×n,B i ∈R n×q are coefficient matrices. φ:[−τ d ,0]→R n is the vector-valued initial function, r is the number of IF-THEN rules.
Through the use of “fuzzy blending” the final fuzzy system is inferred as follows:

with \({\omega_{i}}(t) = \prod_{p = 1}^{e} {{M_{ip}}({z_{p}}(t))}\), \(h_{i}(t) = \omega_{i}(t) / \sum^{r}_{i=1}\omega_{i}(t)\) and M ip (z p (t)) is the grade of the membership function of z p (t) in M ip . It is assumed that ω i (t)≥ 0 for all t≥0,i=1,2,…,r. Therefore the normalized membership function h i (t) satisfies \({h_{i}}(t) \ge 0, \sum_{i = 1}^{r} {{h_{i}}} (t) = 1, t \geq0\).
For convenience, system (2) with u(t)≡0 is introduced.
The following definitions and lemma will be used throughout the paper.
Definition 1
System (3) is said to be positive if for any φ(⋅)⪰0, the corresponding trajectory x(t)⪰0 holds for all t≥0.
Definition 2
System (2) is said to be controlled positive relative to any φ(⋅)⪰0, if there exists a control strategy such that the corresponding trajectory remains in the positive orthant for t≥0.
Lemma 1
System (3) is positive if A i0∈M,A il ⪰0 for any φ(⋅)⪰0, \({i}\in\underline{r}\), \({l}\in\underline{d}\).
Proof
Let x(0)=0, positivity implies \(\dot{x}(0) = \sum_{i = 1}^{r} {{h_{i}}(0)} \sum_{l = 1}^{d} {{A_{il}}\varphi(\cdot)} \ge0\) for φ(⋅)≥0. Now, suppose that there exists x(0)=x∈R n such that x i =0 and \(\dot{x}_{i}(0) < 0\) with x i is the ith element of vector x, \(\dot{x}_{i}(0)\) is the ith element of vector \(\dot{x}(0)\). Then it follows from the continuity of \(\dot{x}(t)\) that there exists a sufficiently small h>0 such that \(\dot{x}(t) < 0\) for t∈[0,h). Thus x i (t)<0 for t∈[0,h), which contradicts the positivity assumption.
To end this section, we define matrix A l for system (2) and (3) which is useful for proving the main results in the subsequent sections, whose (m,n) element satisfying:
where a il,mn is the (m, n) element of matrix A il and a l,mn is the (m, n) element of matrix A l . □
3 Stability Analysis
In this section, we consider the stability analysis for the fuzzy positive systems with delays described in the previous section. The stability condition for fuzzy positive system (3) can be summarized in the following theorem.
Theorem 1
(Stability Analysis)
The system (3) is positive and asymptotically stable, if it satisfies the condition in Lemma 1, and the equivalent statements (i) and (ii) hold.
-
(i)
(LP problem) Suppose there exists a vector \(\lambda\in\boldsymbol{R}_{+}^{n}\) such that
$$ {\lambda^{\mathrm{T}}} \Biggl( {{A_{i0}} + \sum _{l = 1}^d {{A_l}} } \Biggr) \prec0,\quad i \in\underline{r}.$$(5) -
(ii)
(LMI problem) Suppose that there exist r+1 matrices satisfying
$$ \begin{array}{l}P = \mathrm{diag} \{ {{\lambda_1}, \ldots,{\lambda_n}} \} > 0, \\[6pt]{K_i} = \mathrm{diag} \{ {{k_1},{k_2}, \ldots,{k_n}} \} < 0\quad i \in\underline{r},\end{array}$$(6)where k j =λ T a i,j with a i,j is the jth column vector of matrix \(A_{i0}+\sum^{d}_{l=1}A_{l}\) and λ T=[λ 1,…,λ n ].
Proof
Consider the following linear copositive Lyapunov function V(t) for the system (3):
If the condition in Lemma 1 is satisfied, the system (3) is positive system, which implies x(t)⪰0. Vector \(\lambda\in\boldsymbol{R}^{n}_{+}\) exists, thus V(t) is positive define. From (4), we know that \(A_{l}\succeq A_{il},{i}\in\underline{r}, l \in\underline {d}\). Then one has

From (8) we know that if (5) holds for all \({i}\in\underline {r}\), then \(\dot{V}({t}) < 0\) for all t≥0 and thus the open loop fuzzy positive system (3) is asymptotically stable.
Next, we prove that (ii)⇔(i); this is straightforward. Suppose that (i) holds. Thus, there exists vector \(\lambda = [\lambda_{1}, \ldots, \lambda_{n}]^{\mathrm{T}}\in\boldsymbol{R}_{+}^{n}\), such that (6) holds. Let P=diag{λ 1,λ 2,…,λ n } and one immediately sees that (ii) holds if and only if (i) holds. Then the proof is completed. □
Remark 3.1
Compared with the popular QLKF method used in the analysis and synthesis of delayed systems, LCLF captures the nature of positive systems. By the novel LCLF adopted above we get a simpler sufficient stability condition for the delayed fuzzy positive system which is not relevant to the magnitude of delays, and the result is less conservative.
Remark 3.2
Condition (i) in Theorem 1 is a linear programming problem and thus can be numerically solved by the linear programming optimal toolbox with slight computational effort. Meanwhile, (ii) is a linear matrix inequalities problem, which can be solved by the linear matrix inequalities toolbox.
4 Constrained Fuzzy State-Feedback Controller Design
In this section, the design of a constrained state-feedback controller for this class of T-S fuzzy system (2) is presented. Our goal is to design controller to ensure asymptotic stability, positivity of the system (2) and their state x(t) can be bounded by prescribed boundary. Recall that the PDC technique was presented by [7]; the control law can be given as follows:
Plant rule i, \({i}\in\underline{r}\)
IF z 1(t) is M i1 and … and z e (t) is M ie THEN,
Then the closed-loop system (2) is rewritten as follows:
This section studies the constrained state-feedback controller design of continuous-time fuzzy positive system with delays, beginning with following lemmas.
Lemma 2
System (10) is controlled positive for any φ(⋅)⪰0 if
Proof
The proof is similar to that of Lemma 1; here it is omitted □
Lemma 3
For the system (10), if it satisfies the condition in Lemma 2 and there exists vector \(\lambda = [\lambda_{1}, \lambda_{2},\ldots, \lambda_{n}]^{\mathrm{T}}\in\boldsymbol{R}^{n}_{+}\) satisfying
it is asymptotically stable.
Proof
We adopt the same LCLF (7) used in the proof of Theorem 1. If system (10) satisfies the condition in Lemma 2, we know it is controlled positive. And \(\lambda\in\boldsymbol{R}^{n}_{+}\), thus V(t) is positive define. One has

From (13), we know that if (12) holds for all \(({i}, m)\in\underline{r}\times\underline{r}\), then \(\dot{V}({t})< 0\) for all t≥0, and thus the closed-loop positive system (10) is asymptotically stable. □
Lemma 4
For the system (10) satisfying the condition in Lemma 2 and given vector \(\mu = [\mu_{1}, \mu_{2}, \ldots, \mu_{n}]^{\mathrm{T}}\in\boldsymbol{R}^{n}_{+}\) satisfying
then 0⪯φ(⋅)⪯μ implies 0⪯x(t)⪯μ, t≥0.
Proof
From Lemma 2, we know system (10) is controlled positive. Set x k (t) as the kth state variable of state vector x(t) for system (10) and μ k as the kth element of vector μ, \(k \in\underline{n}\). Suppose there exists t s >0 such that 0⪯x(t)⪯μ, t∈[−τ d ,t s ] and x k (t s )=μ k . We get \(0 \preceq x(t_{s} - \tau_{l}) \preceq\mu, l \in \underline{d}\). From (14), one has \(\dot{x}_{k}(t_{s}) < 0\), thus we have 0⪯x(t)⪯μ, for all t≥0, the proof is completed. □
The constrained controller design for system (10) can be summarized as the following theorem.
Theorem 2
Consider a closed-loop system (10) and given \(\mu\in\boldsymbol{R}^{n}_{+}\), if there exist r×d+1 matrices:


and state-feedback law (9) such that the LMIs (17), (19), and BMIs (18) shown in the following are satisfied:



The system (10) is globally asymptotically stable and 0⪯x(t)≺μ when 0⪯φ(⋅)⪯μ for all t ≥0, where \({\theta_{im,k}} = {\lambda^{\mathrm{T}}}{a_{im,k}}, {\rho_{im,k}} ={b}^{\mathrm{T}}_{im,k}\mu\), λ=[λ 1,λ 2,…,λ n ]T with β im,s⋅t is (s,t) element of matrix \(A_{i0}+B_{i}F_{m0}, \forall(i,m) \in\underline {r}\times\underline{r}, \alpha_{il, s\cdot t}\) is (s,t) element of matrix \(A_{il}, \forall(i,l) \in\underline{r}\times\underline {d}, a_{im,k}\) is kth column vector of matrix \(A_{i0} + B_{i}F_{m0}+ \sum^{d}_{l=1}A_{l}\), and \(b^{\mathrm{T}}_{im,k}\) is kth row vector of matrix \(A_{i0} + B_{i}F_{m0} + \sum^{d}_{l=1}A_{il}, \forall(i,m) \in \underline{r}\times\underline{r}\).
Proof
It is obvious that when (15) and (17) hold, Lemma 2 is satisfied, thus system (10) is positive. If (16), (18) and (19) hold, then \(\lambda\in\boldsymbol{R}^{n}_{+}\) exists, Lemmas 3 and 4 are satisfied. Therefore, it can be concluded from Lemmas 2, 3 and 4 that the closed-loop control system (10) is positive, asymptotically stable and state x(t) can be bounded by prescribed boundary μ. Thus, the proof is completed. □
Based on the aforementioned theorem, the following algorithm can be developed [9] though its solution cannot be guaranteed in general.
Algorithm 1
Initialization Step. Use pole placement design technique or any other state-feedback controller design technique to determine a set of initial controller gains.
V-Step
Given a fixed controller gain F m0, \({m}\in\underline{r}\), solve the following optimization problem:
for series of matrices P il ,Q,R im ,S im and \(T_{im}\forall(i, m, l) \in\underline{r} \times\underline{r}\times \underline{d}\), which are defined in (15)–(19), respectively.
K-Step
Using the vector λ T obtained in V-Step, solve the following optimization problem:
for a set of matrices \(F_{m0}, {m}\in\underline{r},P_{il}, Q, R_{im}, S_{im}\) and \(T_{im}\forall(i, m, l) \in \underline{r} \times\underline{r}\times\underline{d}\), which are defined in (15)–(19), respectively.
The previous iteration of V-Step and K-Step stop when γ<0.
Remark 4.1
The solution cannot be guaranteed in general. For example, if the pole is not placed well, computation will be much demanding.
Remark 4.2
In the above theorem, if we neglect the condition (19), the controller design is reduced to positive stabilization which only guarantees the system is positive and asymptotically stable. Its feedback gains \(F_{m0}, m \in\underline{r}\) can also be solved by an algorithm similar to Algorithm 1 in which \(T_{im} < 0,\forall(i, m) \in\underline{r} \times\underline{r}\) is not required.
5 Examples
To illustrate our approaches, two examples will be considered.
Example 1
(Stability analysis)
First of all, we introduce the following continuous-time nonlinear positive system with delay
Next, we consider its fuzzy model as follows. Let \({z}({t}) = \sin^{2}({x}_{1}({t})), {x^{\mathrm{T}}}(t) =[x^{\mathrm{T}}_{1}(t) x^{\mathrm{T}}_{2}(t)]\).
- Rule 1: :
-
IF z(t) is 0, THEN
$$\dot{x} ( t ) = {A_{10}}x(t) + {A_{11}}x(t - 1) +{A_{12}}x(t - 2).$$ - Rule 2: :
-
IF z(t) is 1, THEN
$$\dot{x} ( t ) = {A_{20}}x(t) + {A_{21}}x(t - 1) +{A_{22}}x(t - 2).$$
Its normalized membership functions: h 1(t)=1−sin2(x 1(t)),h 2(t)=sin2(x 1(t)), then parameters matrices of the system (20) in form of fuzzy model are given as follows:

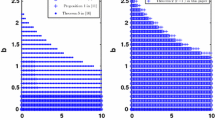
We will compare the feasible regions for the result in Theorem 1 (LCLF) and the result based on QLKF which is introduced in Lemma 1 in [10] by changing a and b, where a takes a value between 1.2 and 1.8 by step of 0.05 and b takes a value between 0.773 and 0.7734 by step of 0.00005. The simulation in Fig. 1 (‘.’ denotes LCLF, ‘O’ denotes QLKF) shows the result in Theorem 1 is relaxed.

Feasible area for LCLF and QLKF
Example 2
([2])
First of all, let us consider process composed of two linked tanks of capacity of 221 each. This system can be described by the following balance equations:
where x i (t) holds for the level in the liter of the tank i. u j (t) represents the flow in liter/min of pump j and Q 12 is the variation of the flow between the two tanks, Q i the loss flow of each tank. Applying the Torricelli law, one obtains \(Q_{1} = \gamma_{1}S_{1}\sqrt{2gx_{1}}, Q_{2} = \gamma_{1}S_{2}\sqrt{2gx_{2}}, Q_{12}= \gamma_{12}S_{1}\sqrt{2g|x_{1} - x_{2}|}\operatorname{sign}(x_{1} - x_{2})\) where γ i and γ ij are physical constants, S i is the tank section and g the gravity acceleration. Then the process model (21) is rewritten as follows:
The obtained model is then nonlinear. Note that the level x i must always be positive.
To obtain a T-S fuzzy representation for this nonlinear system, the classical transformation \(\sqrt{x_{i}(t)} = x_{i}z_{i}\) with \(z_{i}(t)= 1/\sqrt{x_{i}(t)}\) is used. Consider time-delay in real plant, its corresponding process model with time-varying delay is gotten as follows: \(\dot{x}(t) = A(t)x(t) + {A_{d}}x ( {t - d} ) + Bu(t)\), where we have the matrices

By considering that z i (k)∈[a i ,b i ], the four following rules are taken into account:
- IF:
-
z 1(t) is about a 1 and z 2(t) is about a 2, THEN, A(t)=A(a 1,a 2)=A 1.
- IF:
-
z 1(t) is about a 1 and z 2(t) is about b 2, THEN, A(t)=A(a 1,b 2)=A 2.
- IF:
-
z 1(t) is about b 1 and z 2(t) is about a 2, THEN, A(t)=A(b 1,a 2)=A 3.
- IF:
-
z 1(t) is about b 1 and z 2(t) is about b 2, THEN, A(t)=A(b 1,b 2)=A 4.
The membership functions are given by h 1(t)=f 11(t)f 21(t), h 2(t)=f 11(t)⋅f 22(t), h 3(t)=f 12(t)f 21(t), h 4(t)=f 12(t)f 22(t), with f i1(t)=(z i (t)−b i )/(a i −b i ), f i2(t)=1−f i1(t),i=1,2.
Here we are interested in designing a controller by state-feedback PDC method which ensures that the system is asymptotically stable and state x i always remain positive and can be bounded by prescribed boundary η which η is maximum height for admission of the level in the tank.
The parameters R 1, R 2, R 12 are experimentally estimated as R 1=R 2=0.95, R 12=0.52. For a 1=0.2236,b 1=0.4472, a 2=0.2582,b 2=0.4082 and boundary η=[4,4]T, where η is accommodated maximum height for level x=[x 1,x 2]T in the liter of the tank. Using the pole placement design technique, the initial controller gains are chosen as

which are corresponding to the nearby closed-loop pole [−0.0005, −0.0005] for the delayed system. Then by Theorem 2 and using Algorithm 1 after two iterations, the feedback gain F m0 and λ have been obtained shown as follows:

Figure 2 well illustrates our result with initial condition satisfying 0⪯φ(⋅)⪯η.

Phase plots under different initial conditions
6 Conclusions
This paper addressed the stability and constrained control of a class of fuzzy positive systems with delays based on a novel LCLF. Its sufficient condition of asymptotic stability is obtained. A constrained state-feedback fuzzy controller is designed such that the states have positivity and asymptotic stability and are upper-bounded. The stability condition is given under LMI formulations and LP formulations, and the control design conditions are given in the form of BMIs. A constructive controller design algorithm is given based on BMI techniques. A numerical example and a real plant are studied to illustrate the results obtained. It is expected that the idea and technique in this paper will be helpful for further research in this field such as robust H ∞ of fuzzy positive systems, stochastic positive systems and so on.
Abbreviations
- A⪰0:
-
All entries of matrix A are nonnegative
- A⪯0:
-
All entries of matrix A are nonpositive
- A≻0:
-
All entries of matrix A are positive
- A≺0:
-
All entries of matrix A are negative
- A T :
-
The transpose of matrix A
- \(\boldsymbol{R}^{n}_{+}\) :
-
n-dimensional positive vector space
- R n :
-
n-dimensional nonnegative vector space
- R n :
-
n-dimensional real vector space
- R n×m :
-
The set of all real matrices of (n×m)-dimension
- N :
-
The set of the natural numbers
- M :
-
the set of Metaler matrices whose off diagonal entries are nonnegative
References
L. Benvenuti, L. Farina, Positive and compartmental systems. IEEE Trans. Autom. Control 47(2), 70–373 (2002)
A. Benzaouia, A. Hmamed, A.EL. Hajjaji, Stabilization of controlled positive discrete-time T-S fuzzy systems by state feedback control. Int. J. Adapt. Control Signal Process. 24, 1091–1106 (2010)
A. Benzaouia, D. Mehdi, A.El. Hajjaji, M. Nachidi, Relaxed stabilization of controlled positive discrete-time T-S fuzzy systems, in 18th Mediterranean Conference on Control Automation Congress Palace Hotel (2010), pp. 23–25
A. Berman, M. Neumann, R.J. Stern, Nonnegative Matrices in Dynamic Systems (Wiley, New York, 1989)
H. Dong, Z. Wang, W.C.Ho. Daniel, H. Gao, Robust H ∞ fuzzy output-feedback control with multiple probabilistic delays and multiple missing measurements. IEEE Trans. Fuzzy Syst. 18(4), 712–725 (2010)
L. Farina, S. Rinaldi, Positive Linear Systems (Wiley Interscience Series, New York, 2000)
G. Feng, A survey on analysis and design of model-based fuzzy control systems. IEEE Trans. Fuzzy Syst. 14(5), 676–697 (2006)
G. Feng, C.L. Chen, D. Sun, Y. Zhou, H ∞ controller synthesis of fuzzy dynamic systems based on piecewise Lyapunov functions and bilinear matrix inequalities. IEEE Trans. Fuzzy Syst. 13(1), 94–103 (2005)
K.C. Goh, L. Turan, M.G. Safonov, G.P. Papavassilopoulos, J.H. Ly, Biaffine matrix inequality properties and computational methods, in Proc. Amer. Control Conf, Baltimore, MD (1994), pp. 850–855
X. Guan, C. Chen, P. Shi, On robust stability for uncertain time-delay systems: a polyhedral Lyapunov–Krasovskii approach. Circuits Syst. Signal Process. 24(1), 1–18 (2005)
W.M. Haddad, V. Chellaboina, Stability theory for nonnegative and compartmental dynamical systems with time delay. Syst. Control Lett. 51(5), 355–361 (2004)
D. Hinrichsen, N.K. Son, P.H.A. Ngoc, Stability radii of higher order positive difference systems. Syst. Control Lett. 49(5), 377–388 (2003)
J. Hu, Z. Wang, H. Gao, A delay fractioning approach to robust sliding mode control for discrete-time stochastic systems with randomly occurring non-linearities. IMA J. Math. Control Inf. 28(3), 345–363 (2011)
T. Kaczorek, Locally positive nonlinear systems. Int. J. Appl. Math. Comput. Sci. 13(4), 505–509 (2003)
X. Liu, C. Dang, Stability analysis of positive switched linear systems with delays. IEEE Trans. Autom. Control 56(7), 1684–1690 (2011)
X. Liu, L. Wang, W. Yu, S. Zhong, Constrained control of positive discrete-time systems with delays. IEEE Trans. Circuits Syst. II, Analog Digit. Signal Process. 55(2), 193–197 (2008)
X. Liu, W. Yu, L. Wang, Stability analysis for continuous-time positive systems with time-varying delays. IEEE Trans. Autom. Control 55(4), 1024–1028 (2010)
B. Nagy, M. Matolcsi, A lower bound on the dimension of positive realizations. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 50(6), 782–784 (2003)
M.A. Rami, F. Tadeo, Controller synthesis for positive linear systems with bounded controls. IEEE Trans. Circuits Syst. II, Analog Digit. Signal Process. 54(2), 151–155 (2007)
T. Takagi, M. Sugeno, Fuzzy identification of systems and its application to modeling and control. IEEE Trans. Syst. Man Cybern. 15(11), 116–132 (1985)
H.B. Zhang, C.Y. Dang, Piecewise H ∞ controller design of uncertain discrete-time fuzzy systems with time delays. IEEE Trans. Fuzzy Syst. 16(6), 1649–1655 (2008)
Acknowledgements
The work described in this paper was partially supported partly by a grant from the National Natural Science Foundation of China (Grant No. 60904004), partly by a grant from the Fundamental Research Funds for the Central Universities (Grant No. ZYGX2009J020), and partly by a grant from the Research Grants Council of the Hong Kong Special Administrative Region, China [Project No.: CityU 112809], the grant from Chengdu Administration of Science and Technology (10GGYB184GX-023).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Mao, Y., Zhang, H. & Dang, C. Stability Analysis and Constrained Control of a Class of Fuzzy Positive Systems with Delays Using Linear Copositive Lyapunov Functional. Circuits Syst Signal Process 31, 1863–1875 (2012). https://doi.org/10.1007/s00034-012-9401-6
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-012-9401-6