
Abstract
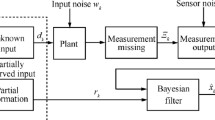
In this paper, the robust filter design problem is studied for a class of uncertain dynamical systems with finite-step correlated process noises and missing measurements. The dynamical system under consideration is subject to both deterministic norm-bounded uncertainties in the measurement output and stochastic uncertainties on the system states. The process noises are assumed to be finite-step correlated. The missing measurement phenomenon is modeled as a binary switching sequence. Based on the min-max game theory, a recursive robust filter is designed that is suitable for online application. A particular feature is that, as the proposed robust filters work in a recursive fashion, there is no need to investigate the existence issue of the filters. A simulation example is presented to illustrate the usefulness of the proposed filter.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
D.P. Bertsekas, I.B. Rhodes, Recursive state estimate for a membership description of uncertainty. IEEE Trans. Autom. Control 16(2), 117–128 (1971)
X. Chen, K. Zhou, H ∞ Gaussian filter on infinite time horizon. IEEE Trans. Circuits Syst. I, Fundam. Theory Appl. 49(5), 674–679 (2002)
Y.L. Chen, B.S. Chen, Minimax robust deconvolution filters under stochastic parametric and noise uncertainties. IEEE Trans. Signal Process. 42(1), 32–45 (1994)
J.M.C. Clark, P.A. Kountouriotis, R.B. Vinter, A new algorithm for GMTI tracking problems, subject to a Doppler blind zone constraint, in IET Seminar on Target Tracking and Data Fusion: Algorithms and Applications, vol. 1 (2008), pp. 51–58
S. Cong, L. Hong, J.R. Layne, Iterative robust filtering for ground target tracking. IET Control Theory Appl. 1(1), 372–380 (2007)
H. Gao, J. Lam, L. Xie, C. Wang, New approach to mixed H 2/H ∞ filtering for polytopic discrete-time systems. IEEE Trans. Signal Process. 53(8), 3183–3192 (2005)
H. Gao, X. Meng, T. Chen, A parameter-dependent approach to robust H ∞ filtering for time-delay systems. IEEE Trans. Autom. Control 53(10), 2420–2425 (2008)
H. Gao, Y. Zhao, J. Lam, K. Chen, H ∞ fuzzy filtering of nonlinear systems with intermittent measurements. IEEE Trans. Fuzzy Syst. 17(2), 291–300 (2009)
L.E. Ghaoui, State-feedback control of systems with multiplicative noise via linear matrix inequalities. Syst. Control Lett. 24(3), 223–228 (1995)
J.C. Geromel, J. Bernussou, G. Garcia, M.C. de Oliveira, H 2/H ∞ robust filtering for discrete-time linear systems. IEEE Conf. Decis. Control 1, 632–637 (1998)
E. Gershon, U. Shaked, I. Yaesh, H ∞ control and filtering of discrete-time stochastic systems with multiplicative noise. Automatica 37(3), 409–417 (2001)
Y.S. Hung, H.T. Ho, A Kalman filter approach to direct depth estimation incorporating surface structure. IEEE Trans. Pattern Anal. Mach. Intell. 21, 570–575 (1999)
Y.S. Hung, F. Yang, H ∞ versus Kalman filtering for depth estimation, in Proc. Int. Conf. Signal Processing Intelligent System, Guangzhou, P.R.C. (1999), pp. 276–281
V.S. Kouikoglou, Y.A. Phillis, Trace bounds on the covariances of continuous-time systems with multiplicative. IEEE Trans. Autom. Control 38(1), 138–142 (1993)
G. Liu, H. Wang, Fault detection and diagnosis for general stochastic systems using B-spline expansions and nonlinear filters. IEEE Trans. Circuits Syst. I, Regul. Pap. 52(8), 1644–1652 (2005)
N. Nhai, Optimal recursive estimation with uncertain observation. IEEE Trans. Inf. Theory 15(4), 457–462 (1969)
Y.A. Phillis, Estimation and control systems with unknown covariance and multiplicative noise. IEEE Trans. Autom. Control 34(10), 1075–1078 (1989)
A.H. Sayed, A framework for state-space estimation with uncertain models. IEEE Trans. Autom. Control 46(7), 998–1013 (2001)
D. Simon, Optimal State Estimation (Wiley/INC Press, New York, 2006)
E. Song, Y. Zhu, Z. You, The Kalman type recursive state estimator with a finite-step correlated process noises, in Proceedings of the IEEE International Conference on Automation and Logistics, Qingdao, China, Sept. 2008
A.M. Tekalp, G. Pavlovic, Image restoration with multiplicative noise: incorporating the sensor nonlinearity. IEEE Trans. Signal Process. 39(9), 2132–2136 (1991)
J.Y. Tourneret, M. Coulon, M. Doisy, Least-squares estimation of multiple abrupt changes contaminated by multiplicative noise using MCMC, in Proc. IEEE Workshop Higher Order Statistics (1999), pp. 1148–1152
Z. Wang, J. Lam, X. Liu, Robust filtering for discrete-time Markovian jump delay systems. IEEE Signal Process. Lett. 11(8), 659–662 (2004)
Z. Wang, Y. Liu, X. Liu, H ∞ filtering for uncertain stochastic time-delay systems with sector-bounded nonlinearities. Automatica 44(5), 1268–1277 (2008)
Z. Wang, D.W.C. Ho, Y. Liu, X. Liu, Robust H ∞ control for a class of nonlinear discrete time-delay stochastic systems with missing measurements. Automatica 45(3), 684–691 (2009)
Z. Wang, D.W.C. Ho, H. Dong, H. Gao, Robust H ∞ finite-horizon control for a class of stochastic nonlinear time-varying systems subject to sensor and actuator saturations. IEEE Trans. Autom. Control 55(7), 1716–1722 (2010)
Z. Wang, Y. Liu, X. Liu, Exponential stabilization of a class of stochastic system with Markovian jump parameters and mode-dependent mixed time-delays. IEEE Trans. Autom. Control 55(7), 1656–1662 (2010)
F. Yang, Z. Wang, Y.S. Hung, Robust Kalman filtering for discrete time-varying uncertain systems with multiplicative noise. IEEE Trans. Autom. Control 47(7), 1179–1183 (2002)
F. Yang, Z. Wang, Y.S. Hung, H. Shu, Mixed H 2/H ∞ filtering for uncertain systems with regional pole assignment. IEEE Trans. Aerosp. Electron. Syst. 41(2), 438–448 (2005)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Feng, J., Wang, Z. & Zeng, M. Recursive Robust Filtering with Finite-Step Correlated Process Noises and Missing Measurements. Circuits Syst Signal Process 30, 1355–1368 (2011). https://doi.org/10.1007/s00034-011-9289-6
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-011-9289-6