
Abstract
The initiation of photogrammetry that arrived in late 90’s permitted the 3D stereoscopic vision for the acquirement of information. A number of methodologies were embraced by several researchers to discover the innumerable aspects of photogrammetry, digital photography and image processing. Among these technologies UAV addressed tools were also employed in fast capturing of substantial areas in the efficient time slot this method was used by conventional aircrafts for efficient capturing. The expansion of unmanned aerial vehicles (UAV) in various fields has expanded comprehensively towards 3D modeling of ancient buildings. This expansion leads to the burden of obtaining highly precise information at multi-angle level and it becomes difficult for traditional technology to solve the 3D reconstruction problems of ancient buildings. To solve the problem of high precision 3D information acquisition and multi-angle real texture feature acquisition, this article proposes a new method of 3D reconstruction of ancient buildings combined with 3D laser scanning and tilt photogrammetry. The new method modifies the advantages of the two technologies and uses the feature point matching algorithm to realize the accurate fusion of multisource data, to gather the construction of a complete three-dimensional model inside and outside the ancient building. Considering the traditional ancestral hall of China as an example, the relative median error is computed for the constructed3D model, which is found to be minimized to 5 mm. The modeling efficiency is greatly improved by the proposed method when compared with the traditional method. The accuracy is relatively high and meets the requirements of modeling accuracy. Because the 3D model, elevation data of ancient buildings constructed in this study are derived from high precision point cloud data extraction. The accuracy of the model can also reach the millimeter level from the calculation results of error and relative middle error. Therefore, the 3D model constructed in this study has a high accuracy. It is revealed that this method provides significant technical support for the restoration and protection of ancient architectural cultural heritage.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
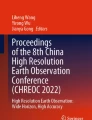
In the ancient buildings the study of modeling is referred as archaeology. It specifically deals with exploring the human culture and analyzing the material evidences for the explanation of the origin of human civilization (Hussain and Will 2020). Traditionally, carbon dating methods were used to extract the valuable historical information from these sites and building (Cowley and Stichelbaut 2012; Sun et al. 2021). These methods are relatively challenging due to the deficiency of professionally specialized Archaeometallurgy experts (Nakamura et al. 2001; Ren et al. 2021). The documentation of the availability of such records is essential for the reinterpretation of some hypothesis studies (Blakelock et al. 2009; Arooj et al. 2021). Thus, in the early nineteenth century, the advent of photogrammetry came into existence to allow 3D stereoscopic vision for information acquisition (Charlton et al. 2012; Kothai et al. 2021). The complete schematic of the photogrammetry technique for 3D modeling of ancient buildings is being depicted in Fig. 1.

Schematic of photogrammetry technique for 3D modeling of ancient buildings
Chinese ancient architecture has a long history and cultural value, and with its unique style, it plays an important role in social cohesion in Chinese traditional society, occupies an important position in the history of world architecture, and has extremely high artistic achievements and scientific value (Marín-Buzón et al. 2021). Protection is of great significance. Like all other historical relics, the value of ancient architecture is that it is a cultural heritage left over from history, cannot be reproduced and built, once destroyed, it is irreparable, it is the material manifestation of the traditional social and cultural spirit (Ren et al. 2019a; Pérez et al. 2014). It contains rich historical value. In the new period, Chinese traditional ancient architecture bears the inheritance and continuation of Chinese culture and has high cultural value and research value. Therefore, the protection of Chinese ancient architecture is particularly important. The traditional manual point measurement method cannot record the building information completely and may cause damage to the building in the process of measurement. Therefore, it is urgent to use a fast and noncontact method to extract information and model the ancient building in three dimensions (Pavlidis et al. 2007).
As a new technology, 3D laser scanning can break through the limitation of single point measurement of traditional measurement method and has the advantages of noncontact, high efficiency and high precision acquisition of 3D point cloud data on the object surface. This technology has been widely used in digital cultural heritage protection and restoration, intelligent city building, information extraction and so on. First, the technology can provide a high-precision database for building monitoring, protection and reconstruction, and building modeling in the Republic of China. Through these related applications, it is found that the disadvantage of this technology is that it is difficult to realize the omnidirectional three-dimensional modeling of buildings because of the inability to obtain the top data. The Use of UAV photogrammetry in 3D modeling also shows a dynamic role in building future smart cities with the assistance of drones it may help us to monitor the traffic controlling, environmental situation, road investigations etc. Also UAV technology can be imbibed with the ubiquitous computing model for efficient processing and computing since in the ubiquitous computing model processing can be done any time anywhere therefore computational time is very efficient and provides the benefit in the real time for critical applications like military surveillances, medical applications.
2 Contribution
This article contributes in addressing the issue of high precision 3D information acquisition and multiangle real texture feature acquisition by proposing a new method of 3D reconstruction of ancient buildings. The proposed method modifies and combines the 3D laser scanning methodology with tilt photogrammetry to obtain the data of ancient buildings. The data acquired using this technique is then combined using data processing with multisource data. This study takes the traditional ancestral hall of Jingshan as the research object and computes the relative median error is computed for the constructed 3D model. Complete two-dimensional information extraction and three-dimensional model reconstruction restore the traditional ancestral hall building information and model. The modeling efficiency is greatly improved by the proposed method when compared with the traditional method and significant technical support can be provided for the restoration and protection of ancient architectural cultural heritage.
Organization: of this article is as follows; Literature review of traditional restoration and protection methodologies for ancient architectural cultural heritage is provided in Sect. 2. Section 3 discusses the material and methods required for the investigation. Results and discussion are presented in Sect. 4 followed by the conclusion and future research scope in Sect. 5.
3 Literature review
The information acquisition on large-scale has become an important research area for feature extraction from the ancient building. By several researchers numerous methodologies have implemented to explore the aspects of digital photography, image processing and photogrammetry. These digital imaging and photogrammetry-based techniques are being utilized for various applications related to building archeology (Luo et al. 2018). The utilization of online archeological information in this environment is being done for different social applications and also being used for research purposes (Kumar and Mutanga 2018). Various other digital mapping platforms like Google Earth is also being utilized by the researchers for obtaining a clearer view of the ancient buildings of cultural heritage, large-scale elevation information, and improve the classification of land cover in the entire ecosystem (Verde et al. 2020; Colomina and Molina 2014).
In conventional aircrafts UAV based technology has employed for allowing convenient and fast capturing of significant areas in the reasonably time slot, that is cost efficient at the same time (Yan et al. 2021; Mozas-Calvache et al. 2012). The usage of UAV has become widespread due to the utilization of aerial photogrammetry for performing potential archaeological surveys (Ratta et al. 2021; Tang and Shabaz 2021). The robust technique of modern photogrammetry has varying requirements and the complexity of tasks is substantially reduced while using cost-effective analytics (Leon et al. 2020; Deshmukh et al. 2021). The UAV based schemes can be used in domains like archeology, agriculture, and forests (Zaman et al. 2018; Perea-Moreno et al. 2016).
Tilt photogrammetry technology has been gradually applied to various field measurements and increasing industry recognition and application. For a large building, the terrain is complex, the surface conditions are complicated, and the visual conditions are poor. Researcher has proposed an approach using UAV aviation tilt photographic measurement technology and real three-dimensional modeling technology, combined with traditional completion measurement techniques for urban cell completion measurements. The results show that the quality of the outcomes is fully met to meet various specification requirements, which can extend to other surveying fields (Novas et al. 2019; Thakur et al. 2021). UAV tilt photographic measurement is a high-tech that the remote sensing and surveying and mapping field has developed in recent years. It has the advantages of strong, high resolution, high precision, high efficiency, and low cost. In this article performed a geological environment survey in Guangdong Province that greatly improved the working efficiency, reduced production costs, and enhanced investigation accuracy. The authors realized the application of drone photography in geological environment surveys, and the results obtained can be similar to the future mining geology environment (Ren et al. 2019b).
The survey conducted from the literature indicates that the data collection using the UAV based approach is determined by various factors like changes in slope, surface and border and the photogrammetry-based method provide a platform for data collection at continuous surface points. The digital photography-based methods are also cost-effective, but they lack in adjusting the geometrical distortions and calibration. However, if digital photography as well as photogrammetry goes hand in hand, then this combination may provide a robust and flexible solution for 3D modeling of ancient buildings.
4 Material and methods
4.1 Cloud data acquisition of ancient buildings
Three-dimensional laser scanner is mainly composed of laser ranging and laser scanning system, the surface point cloud data of the object is obtained by transmitting the laser pulse. Data acquisition using Tianbao SX10 3D scanner, to ensure high accuracy and integrity of point cloud data of ancient buildings. A total of 18 site data were collected after a site survey of the building layout and structure, including 10 inside and 8 outside the building. Among them, the interior texture of the ancient building is complex. Adjacent scan sites ensure no more than 5 m distance, when the overlap rate is not less than 50 (Chen et al. 2021; Wakeford et al. 2019). The houses near the outside of the ancient buildings are dense. The overlap rate during external scanning is not less than 30. Select the standard scan (12.5 mm points at 50 m). Scan range 360 × 300, About 50 min of time, each site cloud number is about 3 × 107. Scanner site location map, as shown in Fig. 2.

Map of scanner site location
4.2 Data on tilt photography of ancient buildings
In this study, Dajiang Phantom4RTK UAV was used to obtain image-free tilt photography data of ancient buildings (Fig. 3). Aircraft carrying 1 inch CMOS, Effective pixel, 20 million, 50 km/h; in positioning mode with the RTK navigation module. Provides real-time centimeter positioning data, which improve the accuracy of image metadata. For this study area, the tilt photography area of UAV is 0.04 km2. Actual aerial photography and modelling area 420 m2. The aerial area is shown in Fig. 3. The drone's course is set in the east–west direction, camera angle − 45. The aerial overlap of the image is greater than 80%. The degree of lateral overlap is greater than 80. In this study, 472 images were obtained. Of which 458 were valid images, 3 h in time through the relationship between altitude (H) and ground resolution (GSD). As shown in formula (1), the best altitude of flight can be calculated.
H is the relative altitude, f is the focal length of the photographic lens, GSD is the ground resolution of the image, and α is the size of the pixel (Remondino et al. 2012; Chakraborty et al. 2021). The optimum relative flight height is 68 m, and the resolution is less than 5 cm. The final resolution of the model is up to 3 cm, which meets the requirements of 1:500 two-dimensional drawing and subsequent data processing.

A schematic diagram of the aerial range
In a word, the characteristics and advantages of 3D laser scanning and UAV tilt photogrammetry are combined. The acquisition of ancient building data can be divided into three parts: the ground 3D laser scanner is used to obtain the high precision point cloud data, the roof part of the ancient building is obtained by UAV low altitude photogrammetry. Two kinds of data fusion can obtain the complete and omnidirectional ancient building space data information.
4.3 Methodology
In this study, the new method of 3D laser scanning and tilt photogrammetry is used to obtain the data of ancient buildings, and the multisource data of laser point cloud data and tilt photography data are fused based on the feature point matching algorithm. To obtain the complete spatial data model of ancient architecture; secondly, the 3D model of ancient architecture is constructed. Finally, a high-precision and complete three-dimensional model of ancient architecture is obtained. The technical route of data processing is shown in Fig. 4 where improved Feature point Matching Algorithm is used to process two further steps (a. selecting the feature points of same name, b. Calculating the rough rotation and translocation matrices) then 3rd step is to make improvements in the above results by further two processes (a. Kd-Tree Neighborhood Search, b. Plane fitting, normal vector calculation) 4th step is optimizing feature points of same name then calculating the rotation and translocation matrix is done to finally obtain Multi-source data fusion model.

Flowchart of improved feature point matching algorithm
4.3.1 Point cloud data processing
Three-dimensional laser scanning has a large amount of data and many sites. The model needs to be constructed after a series of data registration and splicing, texture mapping and denoising filtering. Firstly, the point cloud data and image data are fused; secondly, the point cloud data of each station are registered, and the residual error between adjacent stations is not more than 2 mm. When registration is carried out the result of point cloud data registration in this study is that the point cloud to point cloud error is 1 mm, the registration error between each station ≤ 2 mm, the average of confidence water is ≥ 50, which meets the requirements of ancient building reconstruction. Finally, the point cloud is de-noised and filtered. The original point cloud data contains unnecessary noise data outside the ancient building, such as noise points generated by indoor moving objects, outdoor trees, wires and other houses, etc., excluding the noise points outside the ancient building and the point cloud data not needed inside the building, but only retaining the main body of the ancient building (Sharma et al. 2021). The laser point cloud data model of the traditional ancestral hall can be obtained after the above processing, as shown in Fig. 5.

Schematic diagram of the point cloud model
4.3.2 Tilt data processing
The oblique image data is processed by even light and uniform color before generating the model (Moreira et al. 2021). In the calculation of aerial triangulation, the aerial triangulation is different from the conventional digital aerial photogrammetry because of the characteristics of large inclination angle, large image deformation, unable to unify the scale, many overlaps and so on. In this study, the vertical image and the inclined image are imported into the calculated beam method to obtain the spatial position and attitude information of the local area network adjustment. Through the dense matching of multiview images, the ultra-high density point cloud based on tilt photography real image can be generated, and the high-resolution real scene 3D model based on real image can be generated (Huang et al. 2020). The generation of tilt model has the problems of matching errors, flaw, and vulnerabilities. The model quality can be improved by model refinement, and then the modified model can be mapped to obtain accurate 3D model data (Dash et al. 2021).
4.3.3 Fusion of point cloud data and tilt data
Because the 3D laser scanner on the ground cannot obtain the data of the cornice and the upper part of the ancient building, and the houses around the ancient building are dense, the image data of the building side obtained by the UAV are less, and the inclined model data are generated (Sookoo et al. 2021). To obtain the building information that meets the precision requirement, this study combines the laser point cloud data with the tilt data to obtain the three-dimensional model data of the ancient architecture that meets the requirements. Based on the improved feature point registration algorithm, the basic principle of feature point matching algorithm is to calculate the rotation matrix and translation matrix by manually selecting the feature points of the same name. The main process is as follows:
-
1.
The manual extraction of feature point pairs with the same name, the rotation matrix R1 and the translation matrix are calculated T1 and the data of the two are spliced.
-
2.
M nearest data point to point T (x, y, z) is obtained by using the Kd-Tree nearest neighbor search algorithm, and the least square plane of point cloud coordinate is established to calculate the normal vector of least square plane \(\overrightarrow {{a_{1} }}\).
-
3.
Using Kd-Tree nearest neighbor search method, M/2 nearest data points are obtained from each data, and the least square plane of point T is constructed to calculate the normal vector of the least square plane \(\overrightarrow {{a_{2} }}\).
-
4.
Calculate the angle between the normal vector, Calculate the angle between the normal vector 1 and the zenith direction, respectively, and the zenith direction, respectively \(\alpha_{1}\),\(\alpha_{2}\) and calculate the difference value of \(\alpha_{1}\),\(\alpha_{2}\), when the difference value is less than or equal to the threshold value, calculate the average value of the M point coordinates. When the difference value is greater than the angle threshold T the feature point of the same name is eliminated, the transformation matrix is recalculated, and all the feature points of the same name meeting the requirements are cycled to improve the registration accuracy.
The steps of feature point registration algorithm are as follows: in the process of two kinds of data fusion, let the original coordinate of laser point cloud data be A, the tilt photogrammetry data coordinate is B, according to the coordinate value of the same name point in A and B. The rotation matrix R and translation matrix a can be obtained by formula (2).
The \(P_{A} = RP_{B} + T\) (2)
The PA represents the coordinate value of the same name point A the laser point cloud model, PB the coordinate value of the same name point B the tilt photogrammetry model. R is the rotation transformation matrix between the two models. Secondly, the 3D spatial coordinate values of the three groups of feature points of the same name in the B of the laser point cloud model A and tilt photogrammetry model can be obtained by using the least square method to obtain the 6 parameters needed for coordinate transformation of the two data registration (α, β, γ, t1, t2, t3). The values of rotation matrix R and translation matrix T are obtained are obtained transformation matrix is finally transformed \(Q = \left[ {\left. R \right|T} \right]\).
According to the numerical value of the transformation matrix obtained, the coordinates (\(X_{Bi} ,Y_{Bi} ,Z_{Bi}\)) of each point in the B of the tilt photography model are substituted into the conversion formula (4) between the two stations, respectively. The coordinate values of the B data in the A of the laser point cloud model can be obtained (\(X_{Ai} ,Y_{Ai} ,Z_{Ai}\)). That is to complete the data registration fusion A the tilt photography model, B the point cloud model.
Therefore, this study uses the feature point registration algorithm to obtain high precision cornice model data. After the fusion of the algorithm in this study, the missing data of the laser point cloud data model in the building roof, as well as the phenomenon of pulling flowers and breaking holes in the inclined photography data model, are improved. Finally, the multisource data fusion before and after comparison, as shown in Fig. 6.

source data fusion
Comparison of multi-
5 Results and discussion
5.1 Results
5.1.1 Multi-source data fusion results
In this study, to compare the accuracy of multisource data fusion point error is used. The 12 feature points in the data fusion are shown in Fig. 7. Based on the laser point cloud data, the fusion accuracy of multisource data is shown in Table 1. \(\Delta x,\Delta y,\Delta z\) of 12 points can be obtained by coordinate comparison. According to the point error formula (5), the point error of each point can be calculated. The maximum point error is 3.00 cm, the minimum point error is 1.00 cm, and the average point error is 1.60 cm. Because the resolution of tilt photogrammetry data is centimeter level, the error of multisource data fusion in this study is small.

Characteristics of buildings
5.1.2 Two-dimensional Information Extraction of Ancient Buildings
According to the point cloud model, tilt model and multisource data fusion model, the information extraction of building plan and elevation map is carried out. Based on the high-precision point cloud model, the two-dimensional information such as the inner facade, the outer facade and the interior plan of the ancient building are extracted; the plane slope map of the area above the eaves of the ancient building is drawn based on the tilt model; the multisource data model which combines the point cloud data with the tilt data can extract the architectural details such as the eaves and cornice of the ancient building. First of all, the view of any angle of the building can be obtained by using the processed model data. The orthophoto image is constructed based on the model data of the exterior facade, interior facade and overlooking surface of the building, and the two-dimensional information extraction of all kinds of elevation plans and plans of ancient buildings is carried out.
Secondly, because the model data has accurate three-dimensional spatial coordinate values, the distance between any points of ancient buildings can be calculated according to the building contour and building structure extracted by orthophoto image, and the relationship between various kinds of building structures and the amount of different building materials can provide reliable and accurate spatial coordinate information for the restoration and reconstruction of ancient buildings. The building facade and plan are provided in Fig. 8.

Building facade and plan
5.1.3 3D Modeling of Ancient Architecture
The three-dimensional modeling of ancient buildings mainly includes the following steps: first, each elevation map extracted based on high precision point cloud data is spliced, and the white model is constructed according to the characteristic line of the building. Secondly, texture mapping is carried out to make the model change from a geometric entity to a true 3D model. In the process of collecting data, the 3D laser scanner acquires the image information of different angles in each direction of the ancient building. By mapping and rendering the image, the effect of the texture picture can reach the most consistent state with the model. Finally, the three-dimensional model of the ancient architecture after texture mapping and rendering, as shown in Fig. 9, can be displayed on the network platform.

3D model of ancient architecture
3D printing is to present the spatial form of the three-dimensional model in proportion to the three-dimensional entity. For the complex three-dimensional model of ancient architecture, its advantages are more prominent, and the complex solid model can be made efficiently. For cultural relic repair and monitoring. In this study, polymer materials are used for printing, which are easy to form, more economical, and have good ductility and impact resistance. Model printing time is affected by model size, fineness and printing quality. In addition, before the model is printed, it is necessary to check whether the model structure is stable or not, and to set the position strengthened by the model for the unstable situation. This study prints two three-dimensional models of different sizes, with scales of 1:30 and 1:130, respectively. According to the needs of the model, the roof part of the model is printed separately, which is convenient to observe the internal details of the ancient building model. 3D print completed 3D model as shown in Fig. 10. From the figure, we can see that the 3 D printing model completely and truly restores the accurate 3D model of the ancient building of Li's family temple, which can be displayed intuitively, and has a positive effect on the restoration and protection of the ancient building and the spread of clan culture.

Printing model 3D ancient building
5.2 Discussion
5.2.1 Comparison of modeling accuracy
Accuracy verification is essential for 3d modeling. To verify the accuracy of the model, this study uses the actual measurement length of the Leica-d2 laser rangefinder and the comparison of the constructed model to verify the accuracy results 0.8 objects of the ancient building model are selected to compare the actual laser rangefinder data with the actual laser rangefinder data (Fig. 11).

Measurement schematic
In this study, the error and relative median error are used to compare and analyze the accuracy of the target object. The average difference between the 8 objects of the 3D model of the building can be obtained |ΔS| Mean: 4.33, 4.83, 4.67, 3.17, 4.83, 4.00, 5.67 and 4.50 mm, the average error of 8 objects is 4.50 mm.At the same time, the maximum distance difference between the measured length and the model length is the building height |ΔS|Max = 14 mm. Minimum distance difference |ΔS|min = 1 mm.The modeling accuracy should not exceed 20 cm, and the building height difference should not exceed 1.0 m. According to the accurate modeling requirements of the building the error of the 3D model is within the requirement of accurate modeling of the building, and the error is small. Secondly, the relative median error δ, as shown in formula (6), can be further calculated to verify the accuracy of each object.
Among them: Δ = Δs,n is the number of observations. For this study n, calculation results of 6, the relative median errors are shown in Table 2. The relative median errors of 8 objects in the 3D model of buildings are 4.43, 6.72, 5.48, 3.67, 5.08, 4.24, 5.83 and 4.98 mm, The average relative median error of 8 objects is 5.05 mm. It can be the error of each object in this study is small. In summary, from the accuracy analysis of error and relative middle error, this study proposes an improved feature point matching algorithm to realize the accurate fusion of multisource data and the construction of three-dimensional model of ancient architecture. The accuracy is relatively high and meets the requirements of modeling accuracy. Because the 3D model, elevation data of ancient buildings constructed in this study are derived from high precision point cloud data extraction. The accuracy of the model can also reach the millimeter level from the calculation results of error and relative middle error. Therefore, the 3D model constructed in this study has high accuracy.
5.2.2 Modeling efficiency analysis
To verify that the 3D modeling based on this study is more efficient than the traditional measurement methods, the modeling efficiency is analyzed. The laser point cloud data of ancient buildings were collected from 18 stations, the scanning time of a single station was 50 min, and h; a total of 15 UAV tilt photogrammetry acquisition data were synchronized, which took about 3 h. To obtain the data because the 3D laser can be observed all time, it takes only 1 day to obtain the data. Registration and stitching of laser point cloud data, denoising and simplification of laser point cloud data of tilt photogrammetry data, and multisource data fusion of point cloud data and tilt photography data h, A total of 5 building plans and elevation map extraction drawing about 3 h. Due to the complexity of the main entrance structure, doors and windows and internal structure of the ancient architecture, it takes some time to process the model carefully in the later stage of 3D solid modeling, but both 3D laser and tilt photography collect the image of the building and save the time of texture acquisition. Finally, this study uses 3 days to complete the construction of three-dimensional model of ancient architecture.
3D in the acquisition of building size information using traditional manual modeling and manual use of tape measures or laser rangefinder; Secondly, due to the limited building information collected, the time required for 3D modeling of subsequent buildings is greatly increased, and it takes about 1 week to use traditional manual modeling. Available traditional modeling is time-consuming and laborious and the data obtained are inefficient; In the process of manual measurement, frequent contact with the components of ancient buildings is easy to cause damage to ancient buildings. Therefore, the modeling efficiency of this research method is more efficient than that of the traditional method, and of 3D laser point cloud data and UAV tilt photography data can reduce the error rate of internal and external industries in the modeling process. The cost of returning site supplementary measurement data is avoided. At the same time, the 3D laser point cloud data and the ancient building data obtained by UAV tilt photogrammetry are more abundant and complete, which is the original 3D spatial model data that can be archived. It can provide the most original data support for scientific research personnel. To sum up, this research method has great benefit in constructing three-dimensional models of ancient architecture.
6 Concluding remarks
This paper takes the traditional ancestral hall of Jiushan Village, a traditional Chinese village, as the research object, and uses the noncontact measurement technology combined with 3D laser scanning technology and tilt photography technology to carry out the comprehensive and fine 3D modeling application of ancient buildings. The following three conclusions are obtained:
-
1.
The improved feature point matching algorithm is proposed to realize the accurate fusion of multisource data, which can quickly obtain the complete and omnidirectional three-dimensional space data of ancient buildings and provide data support for the modeling of ancient buildings.
-
2.
Average error of fusion accuracy between laser point cloud data and tilt photogrammetry data constructed in this study is 1.6 cm, and the data fusion accuracy is high, which indicates that multisource data fusion has high accuracy.
-
3.
Constructed 3D model compared with the actual measurement, the relative median errors of the eight objects of the constructed 3D model are 4, 7, 5, 4, 5, 4, 6 and 5 mm, and the average value is 5 mm, which meets the requirements of accurate modeling accuracy. Moreover, the relative median error of each object of the model is small and the modeling accuracy is high.
Application results show that this study can provide fine, omni-directional, complete two-dimensional information and data support of three-dimensional models for the restoration of ancient buildings. It can be displayed intuitively by 3D printing model, which has a positive effect on restoration, protection of ancient buildings, and the spread of clan culture. The scopes which should be revealed as a future perspective of this research work are: This study should be tested for large amount of data and more redundant data and the improvement should be investigated further for the extraction of some complex structures. In the future, the development direction is to improve the ability of information extraction and to build a big data platform with the integration of real-time data acquisition, transmission and information extraction, to further enhance the value of data acquisition, information extraction and archiving. Therefore, the modeling efficacy of the method used in this research is extra resourceful compared to the traditional method, At the same time, the 3D laser point cloud data and the ancient building data obtained by UAV tilt photogrammetry are more ample and complete, which is the original 3D spatial model data that can be recorded. This approach can provide the most original data support for scientific research personnel. This research method is determined to have a great benefit in constructing three-dimensional models of ancient architecture.
References
Arooj A, Farooq MS, Akram A, Iqbal R, Sharma A, Dhiman G (2021) Big data processing and analysis in internet of vehicles: architecture, taxonomy, and open research challenges. Arch Comput Methods Eng. https://doi.org/10.1007/s11831-021-09590-x
Blakelock E, Martinón-Torres M, Veldhuijzen HA, Young T (2009) Slag inclusions in iron objects and the quest for provenance: an experiment and a case study. J Archaeol Sci 36(8):1745–1757. https://doi.org/10.1016/j.jas.2009.03.032
Chakraborty C, Sarkar C, Sinha D (2021) Design of a priority based local energy market using blockchain technology. Michael Faraday IET International Summit 2020 (MFIIS 2020). Michael Faraday IET International Summit 2020 (MFIIS 2020). https://doi.org/10.1049/icp.2021.1168
Charlton MF, Blakelock E, Martinón-Torres M, Young T (2012) Investigating the production provenance of iron artifacts with multivariate methods. J Archaeol Sci 39(7):2280–2293. https://doi.org/10.1016/j.jas.2012.02.037
Chen H, Lan YK, Fritz B, Clint Hoffmann W, Liu S (2021) Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV). Int J Agric Biol Eng 14(1):38–49. https://doi.org/10.25165/j.ijabe.20211401.5714
Colomina I, Molina P (2014) Unmanned aerial systems for photogrammetry and remote sensing: a review. ISPRS J Photogramm Remote Sens 92:79–97. https://doi.org/10.1016/j.isprsjprs.2014.02.01
Cowley DC, Stichelbaut BB (2012) Historic aerial photographic archives for european archaeology. Eur J Archaeol 15(2):217–236. https://doi.org/10.1179/1461957112y.0000000010
Dash S, Chakraborty C, Giri SK, Pani SK (2021) Intelligent computing on time-series data analysis and prediction of COVID-19 pandemics. Pattern Recogn Lett 151:69–75. https://doi.org/10.1016/j.patrec.2021.07.027
Deshmukh S, Thirupathi Rao K, Shabaz M (2021) Collaborative learning based straggler prevention in large-scale distributed computing framework. Secur Commun Netw 2021:1–9. https://doi.org/10.1155/2021/8340925
Huang C, Zhang H, Zhao J (2020) High-efficiency determination of coastline by combination of tidal level and coastal zone DEM from UAV tilt photogrammetry. Remote Sens 12(14):2189. https://doi.org/10.3390/rs12142189
Hussain ST, Will M (2020) Materiality, agency and evolution of lithic technology: an integrated perspective for palaeolithic archaeology. J Archaeol Method Theory 28(2):617–670. https://doi.org/10.1007/s10816-020-09483-6
Kothai G, Poovammal E, Dhiman G, Ramana K, Sharma A, AlZain MA, Gaba GS, Masud M (2021) A new hybrid deep learning algorithm for prediction of wide traffic congestion in smart cities. Wirel Commun Mob Comput 2021:1–13. https://doi.org/10.1155/2021/5583874
Kumar L, Mutanga O (2018) Google earth engine applications since inception: usage, trends, and potential. Remote Sens 10(10):1509. https://doi.org/10.3390/rs10101509
Leon I, Pérez JJ, Senderos M (2020) Advanced techniques for fast and accurate heritage digitisation in multiple case studies. Sustainability 12(15):6068. https://doi.org/10.3390/su12156068
Luo L, Wang X, Guo H, Lasaponara R, Shi P, Bachagha N, Li L, Yao Y, Masini N, Chen F, Ji W, Cao H, Li C, Hu N (2018) Google earth as a powerful tool for archaeological and cultural heritage applications: a review. Remote Sens 10(10):1558. https://doi.org/10.3390/rs10101558
Marín-Buzón C, Pérez-Romero A, López-Castro JL, Ben Jerbania I, Manzano-Agugliaro F (2021) Photogrammetry as a new scientific tool in archaeology: worldwide research trends. Sustainability 13(9):5319. https://doi.org/10.3390/su13095319
Moreira BM, Goyanes G, Pina P, Vassilev O, Heleno S (2021) Assessment of the influence of survey design and processing choices on the accuracy of tree diameter at breast height (DBH) measurements using UAV-based photogrammetry. Drones 5(2):43. https://doi.org/10.3390/drones5020043
Mozas-Calvache AT, Pérez-García JL, Cardenal-Escarcena FJ, Mata-Castro E, Delgado-García J (2012) Method for photogrammetric surveying of archaeological sites with light aerial platforms. J Archaeol Sci 39(2):521–530. https://doi.org/10.1016/j.jas.2011.10.007
Nakamura T, Taniguchi Y, Tsuji S, Oda H (2001) Radiocarbon dating of charred residues on the earliest pottery in Japan. Radiocarbon 43(2B):1129–1138. https://doi.org/10.1017/s0033822200041783
Novas N, Alvarez-Bermejo JA, Valenzuela JL, Gázquez JA, Manzano-Agugliaro F (2019) Development of a smartphone application for assessment of chilling injuries in zucchini. Biosys Eng 181:114–127. https://doi.org/10.1016/j.biosystemseng.2019.03.009
Pavlidis G, Koutsoudis A, Arnaoutoglou F, Tsioukas V, Chamzas C (2007) Methods for 3D digitization of cultural heritage. J Cult Herit 8(1):93–98. https://doi.org/10.1016/j.culher.2006.10.007
Perea-Moreno A-J, Aguilera-Ureña M-J, Meroño-De Larriva J-E, Manzano-Agugliaro F (2016) Assessment of the potential of UAV video image. Analysis. https://doi.org/10.3390/w8120584
Pérez JA, Bascon FM, Charro MC (2014) Photogrammetric usage of 1956–57 usaf aerial photography of Spain. Photogram Rec 29(145):108–124. https://doi.org/10.1111/phor.12048
Ratta P, Kaur A, Sharma S, Shabaz M, Dhiman G (2021) Application of blockchain and internet of things in healthcare and medical sector: applications, challenges, and future perspectives. J Food Qual 2021:1–20. https://doi.org/10.1155/2021/7608296
Remondino F, Barazzetti L, Nex F, Scaioni M, Sarazzi D (2012). UAV photogrammetry for mapping and 3d modeling—current status and future perspectives. Int Arch Photogram, Remote Sens Spatial Inf Sci. XXXVIII-1/C22, 25–31. https://doi.org/10.5194/isprsarchives-xxxviii-1-c22-25-2011
Ren H, Zhao Y, Xiao W, Hu Z (2019a) A review of UAV monitoring in mining areas: current status and future perspectives. Int J Coal Sci Technol 6(3):320–333. https://doi.org/10.1007/s40789-019-00264-5
Ren J, Chen X, Zheng Z (2019b) Future prospects of UAV tilt photogrammetry technology. IOP Conf Ser Mater Sci Eng 612:032023. https://doi.org/10.1088/1757-899x/612/3/032023
Ren X, Li C, Ma X, Chen F, Wang H, Sharma A, Gaba GS, Masud M (2021) Design of multi-information fusion based intelligent electrical fire detection system for green buildings. Sustainability 13(6):3405. https://doi.org/10.3390/su13063405
Sharma C, Bagga A, Singh BK, Shabaz M (2021) A novel optimized graph-based transform watermarking technique to address security issues in real-time application. Math Probl Eng 2021:1–27. https://doi.org/10.1155/2021/5580098
Sookoo A, Garg L, Chakraborty C (2021) Improvement of system performance in an IT production support environment. Int J Syst Assur Eng Manag 12(3):461–479. https://doi.org/10.1007/s13198-021-01092-0
Sun H, Fan M, Sharma A (2021) Design and implementation of construction prediction and management platform based on building information modelling and three-dimensional simulation technology in industry 4.0. IET Collab Intell Manuf. https://doi.org/10.1049/cim2.12019
Tang S, Shabaz M (2021) A new face image recognition algorithm based on cerebellum-basal ganglia mechanism. J Healthc Eng 2021:1–11. https://doi.org/10.1155/2021/3688881
Thakur D, Singh J, Dhiman G, Shabaz M, Gera T (2021) Identifying major research areas and minor research themes of android malware analysis and detection field using LSA. Complexity 2021:1–28. https://doi.org/10.1155/2021/4551067
Verde N, Kokkoris IP, Georgiadis C, Kaimaris D, Dimopoulos P, Mitsopoulos I, Mallinis G (2020) National scale land cover classification for ecosystem services mapping and assessment, using multitemporal copernicus eo data and google earth engine. Remote Sens 12(20):3303. https://doi.org/10.3390/rs12203303
Wakeford ZE, Chmielewska M, Hole MJ, Howell JA, Jerram DA (2019) Combining thermal imaging with photogrammetry of an active volcano using UAV: an example from Stromboli. Italy Photogramm Rec 34(168):445–466. https://doi.org/10.1111/phor.12301
Yan Z, Yu Y, Shabaz M (2021) Optimization research on deep learning and temporal segmentation algorithm of video shot in basketball games. Comput Intell Neurosci 2021:1–10. https://doi.org/10.1155/2021/4674140
Zaman S, Chakraborty C, Mehajabin N, Mamun-Or-Rashid Md, Razzaque Md. A (2018). A deep learning based device authentication scheme using channel state information. In: 2018 International conference on innovation in engineering and Technology (ICIET). https://doi.org/10.1109/ciet.2018.8660937
Funding
There is no funding support to carry this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest and all ethical issues including human or animal participation has been done. No such consent is applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Guo, Q., Liu, H., Hassan, F.M. et al. Application of UAV tilt photogrammetry in 3D modeling of ancient buildings. Int J Syst Assur Eng Manag 13 (Suppl 1), 424–436 (2022). https://doi.org/10.1007/s13198-021-01458-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-021-01458-4