
Abstract
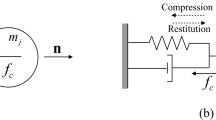
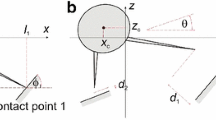
This paper presents a methodology in computational dynamics for the analysis of mechanical systems that undergo intermittent motion. A canonical form of the equations of motion is derived with a minimal set of coordinates. These equations are used in a procedure for balancing the momenta of the system over the period of impact, calculating the jump in the body momentum, velocity discontinuities and rebounds. The effect of dry friction is discussed and a contact law is proposed. The present formulation is extended to open and closed-loop mechanical systems where the jumps in the constraints' momenta are also solved. The application of this methodology is illustrated with the study of impact of open-loop and closed-loop examples.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Meirovich, L.,Methods of Analytical Dynamics, McGraw-Hill, NY, 1970.
Wittaker, E. T.,Analytical Dynamics, 4th ed., Cambridge University Press, London, 1937.
Pars, L. A.,A Treatise of Analytical Dynamics, William Heinemann, London, 1965.
Kane, T. R.,Dynamics, Holt, Rinehaut and Wilson, Inc., 1968.
Brach, R. M., ‘Rigid body collisions’,ASME Journal of Applied Mechanics 56, 1989, 133–138.
Haug, E. J., Wu, S. C., and Yang, S. M., ‘Dynamics of mechanical systems with Coulomb friction, stiction, impact and constraint addition and deletion — I’,Mechanism and Machine Theory 21, 1986, 401–406.
Lankarani, M. H. and Nikravesh, P. E., ‘Application of the canonical equations of motion in problems of constrained multibody systems with intermittent motion’, inAdvances in Design Automation, DE-Vol. 14, 1988, pp. 417–423.
Nikravesh, P. E.,Computer Aided Analysis of Mechanical Systems, Prentice-Hall, Englewood Cliffs, NJ, 1988.
Wittenburg, J.,Dynamics of Systems of Rigid Bodies, B. G. Teubner, Stuttgart, W. Germany, 1977.
Jerkovsky, W., ‘The structure of multibody dynamics equations’,Journal of Guidance and Control 1, 1978, 173–183.
Kim, S. D. S. and Vanderploeg, M. J., ‘A general and efficient method for the dynamics analysis of mechanical systems using velocity transformations’,ASME Journal of Mechanisms, Transmissions, and Automation in Design 108, 1986, 176–182.
Nikravesh, P. E. and Gim, G., ‘Systematic construction of the equations of motion for multibody systems containing closed kinematic loops’, inProceedings 15th Design Automation Conference, Montreal, Canada, ASME, New York, 1989, pp. 27–33.
Nikravesh, P. E., ‘Systematic reduction of multibody equations of motion a minimal set’,International Journal of Non-Linear Mechanics 25, 1990, 143–151.
Lanczos, C.,The Variational Principle of Mechanics, 4th ed., Dover, NY, 1986.
Jean, M. and Moreau, J. J., ‘Unilaterality and dry friction in the dynamics of rigid body collections’, inProceedings Contact Mechanics International Symposium, A. Curnier (ed.), PPUR, 1992, pp. 31–48.
Jean, M. and Moreau, J. J., ‘Dynamics of elastics or rigid bodies with frictional contact: Numerical methods’, Mécanique, Modelisation, Numérique et Dynamique des Materiaux, inRencontres Scientifiques du Cinquantenaire, 8–10 April 1991, pp. 9–29.
Smith, C. E., ‘Predicting rebounds using rigid body dynamics’,Transactions of the ASME 58, 1991, 754–758.
Stronge, W. J., ‘Rigid body collisions’,Proceedings of the Royal Society of London A 431, 1990, 169–181.
Keller, J. B., ‘Impact with friction’,Journal of Applied Mechanics 53, 1986, 1–4.
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Pereira, M.S., Nikravesh, P. Impact dynamics of multibody systems with frictional contact using joint coordinates and canonical equations of motion. Nonlinear Dyn 9, 53–71 (1996). https://doi.org/10.1007/BF01833293
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/BF01833293