
Summary
The aim of this paper is to show that multibody systems with a large number of degrees of freedom can be efficiently modelled, taking conjointly advantage of a recursive formulation of the equations of motion and of the symbolic generation capabilities.
Recursive schemes are widely used in the field of multibody dynamics since they avoid the “explosion” of the number of arithmetical operations in case of large multibody models. Within the context of our field of applications (railway dynamics simulation), explicit integration schemes are still prefered and thus oblige us to compute the generalized accelerations at each time step. To achieve this, we propose a new formulation of the well-known Newton/Euler recursive method, whose efficiency will be compared with a so-called “O(N)” formulation.
A regards the symbolic generation, often decried due to the size of the equations in case of large systems, we have recently implemented recursive multibody formalisms in the symbolic programme ROBOTRAN [1]. As we shall explain, the recursive nature of these formalisms is particularly well-suited to symbolic manipulation.
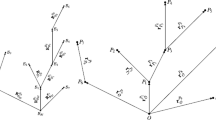
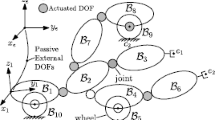
All these developments have been successfully applied in the field of railway dynamics, and in particular allowed us to analyse the dynamic behaviour of several railway vehicles. Some typical results related to a completely non-conventional bogie will be presented before concluding.
Article PDF
Similar content being viewed by others
Avoid common mistakes on your manuscript.
References
Maes, P.;Samin, J. C.;Willems, P. Y.: ROBOTRAN. In: Schiehlen, W. (ed.) Multibody System Bandbook, pp. 225–245. Berlin: Springer 1989
Andrzejewski, Th.;Bock, H. G.;Eich, E.;von Schwerin, R.: Recent advances in the numerical integration of multibody systems. In: Schiehlen, W. (ed.) Advanced Multibody System Dynamics, pp. 49–66. Dordrecht: Kluwer Aademic Publishers 1993
Wittenburg, J.: Dynamics of systems of rigid bodies. Stuttgart: Teubner 1977
Kane, Th. R.;Levinson, D. A.: Dynamics: Theory and applications. New-York: McGraw-Hill 1985
Roberson, R. E.;Schwertassek, R.: Dynamics of multibody systems. Berlin: Springer 1988
Eichberger, A.;Führer, C.;Schwertassek, R.: The benefits of parallel multibody simulation and its application to vehicle dynamics. In: Schiehlen, W. (ed.). Advanced Multibody System Dynamics, pp. 107–126. Dordrecht: Kluwer Academic Publishers 1993
Fisette, P.: Génération symbolique des équations du mouvement de systèmes multicorps et application dans le domaine ferroviaire. PHD Thesis, University of Louvain-la-Neuve, Belgium, 1994
Petzold, L.: Methods and softwares for differential/algebraic systems. In: Haug, E. J.; Roderic, C. D. (eds.) NATO ASI Series, Serie F: Computer and Systems Sciences 69, pp. 127–140. Berlin: Springer 1989
Führer, C.;Leimkuhler, B.: A new class of generalized inverses for the solution of discretized Euler-Lagrange equations. In: Haug, E. J.; Roderic, C. D. (eds.) NATO ASI Series, Serie F: Computer and Systems Sciences 69, pp. 143–154. Berlin: Springer 1989
Wehage, R. A.;Hung, E. J.: Generalized coordinate partitioning for dimension reduction in analysis of constrained dynamic systems. J. Mech. Design 134 (1982) 247–255
Fisette, P.;Samin, J. C.: A new wheel/rail contact model for independent wheels. Arch. Appl. Mech. 64 (1994) 192–205
Renaud, M.: Quasi-minimal computation of the dynamic model of a robot manipulator utilizing the Newton-Euler formalism and the notion of augmented body. In: Proc. IEEE Int. Conf. Robotics and Automation, Raleigh, North Carolina, 1987, pp. 1677–1682
Luh, J. Y. S.;Walker, N. W.;Paul, R. P. C.: On-line computational scheme for mechanical manipulators. Trans. ASME/J. Dyn. Syst. Meas. Control 102 (1980) 69–76
Schwertassek, R.;Rulka, W.: Aspects of efficient and reliable multibody systems simulation. In: Haug, E. J.; Roderic, C. D. eds. NATO ASI Series, Serie F: Computer and Systems Sciences 69, pp. 55–96. Berlin: Springer 1989
Baumgarte, J.: Stabilization of constraints and integrals of motion computer methods. Applied Mechanics and Engineering 1 (1972) 1–16
Bae, D. S.;Yang, S. M.: A stabilization method for kinematic and kinetic constraint equations. In: Haug, E. J.; Roderic, C. D. eds. NATO ASI Series, Serie F: Computer and Systems Sciences 69, pp. 209–232. Berlin: Springer 1989
Bae, D. S.;Haug, E. J.: A recursive formulation for constrained mechanical systems, part 1: Open loop. Mech. of Structures and Machines 15 (1987) 359–382
Fisette, P.; Lipinski, K.; Samin, J. C.: Symbolic generation of large degrees of freedom multibody systems. Proc. 6th DYNAME 95 Symposium, Brazil, 6–10 march 1995, pp. 299–302
Fisette, P.;Samin, J. C.: Lateral dynamics of a light railway vehicle with independent wheels. Vehicle System Dynamics 20 (1991) 157–171
Kortüm, W.;Sharp, R. S.: Multibody computer codes in vehicle system dynamics (supplement to Vehicle System Dynamics 22). Amsterdam/Lisse: Swets & Zeitlinger 1993
Maes, P.;Samin, J. C.;Willems, P. Y.: Autodyn. In: Schiehlen, W. (ed.) Multibody System Handbook, pp. 225–245. Berlin: Springer 1989
Fisette, P.;Samin, J. C.;Willems, P. Y.: Contribution to symbolic analysis of deformable multibody systems. Int. J. Num. Meth. Eng. 32 (1991) 1621–1635
Author information
Authors and Affiliations
Rights and permissions
About this article
Cite this article
Fisette, P., Samin, J.C. Symbolic generation of large multibody system dynamic equations using a new semi-explicit Newton/Euler recursive scheme. Arch. Appl. Mech. 66, 187–199 (1996). https://doi.org/10.1007/BF00795220
Received:
Accepted:
Issue Date:
DOI: https://doi.org/10.1007/BF00795220