
Abstract
Recently, in order to assist the disabled people moving around, many support systems and tools have been developed. However, a moving person supported by wheelchairs in the building has a significant problem of lacking GPS signal. This paper presents a new indoor navigation system for wheelchairs, using smartphones as a sensor and navigation medium. In this navigation system, the wheel sensor in the wheelchair and the digital compass of the smartphone are used to calculate the current location accurately. Moreover, the navigation system provides a map function that displays possible and optimum routes of passage in a wheelchair from the current location to a destination in the building. The experimental results and evaluation are also presented.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In this study, we build a navigation system for disabled people who are using wheelchairs, in order that the wheelchair can move in department buildings, apartments and offices without problems. This navigation system provides the important information about the building for example stairs, ramps and slopes, and linking the routes of indoor and outdoor locations. It can be used not only for people with disabilities but also for normal people, who can reach the destination by the optimal route.
We avoid using GPS signal, because in indoor environment, the GPS signal is weak and in may cause location errors and confusion. Instead, we use the information provided by the wheelchair sensor and smartphone’s compass.
In order to use this information correctly, a user needs to download a detailed map of the location of interest. This map information will be available to download online (through web service) or onsite (through reading QR codes).
In our system, we use Java Open Street Map (JOSM) to create map databases for indoor and outdoor locations. Furthermore, A* algorithm and pgRouting are used to calculate the best route to destination. Then, we simulate two examples of movement in our department building. One representing indoor-to-indoor movement and the other one shows the best path for outdoor-to-indoor movement.
This paper is summarized as following. In Sect. 2, we describe the purpose and motivation of our research. In Sect. 3, we show the methods used in our system. In Sect. 4, we introduce our navigation system. In Sect. 5, we show results from simulations. And finally, we summarize the paper in Sect. 6.
2 Purpose and Motivation of Research
2.1 Usage of Wheelchair
People with disabilities have many difficulties in moving alone if there is no assistant to show the way or help with directions. Especially when they do not know the location information, it is very difficult. The disabled people as well as healthy people need to be notified about the current position, in order to reach the destination safely. For this reason, a navigation system is introduced by using a sensor on the wheel of the wheelchair to calculate the moving direction and using compass in smartphone for displaying the direction of movement.
2.2 Indoor Navigation Techniques
As the power of GPS signal becomes small inside the buildings, this signal is hard to be utilized. Although various indoor navigation systems have been developed using different techniques, they often cannot navigate successfully because of the positioning errors. There are methods to measure the received power of the Bluetooth or Wi-Fi, and a method using an RFID sensor. Currently, the best method for indoor navigation is using the GPS repeater, but it has a very high cost.
2.3 Outdoor and Indoor Navigation
The disabled persons must select the location of the destination from the current position. They must also select and specify the location of the destination from indoor to outdoor or outdoor to indoor. Therefore it is necessary to find the optimal route between the outdoor and indoor.
3 Positioning System’s Methods
3.1 Compass in Smartphone
The compass function is added recently in smartphones, and it can calculate the direction of the wheelchair movement. The compass of smartphone shows values from 0 to 359 degrees by measuring the Earth’s magnetic field. It shows the direction of north at 0 degrees, east at 90 degrees, south at 180 degrees, and west at 270 degrees.
3.2 Wheel Sensor
A wheel sensor is used for measuring the speed of the wheel. The sensor is attached to the wheels of the wheelchair, and communicates with smartphone. In this paper, the smartphone collects data, such as speed, from the wheel sensor by using Bluetooth.
3.3 Map Database
For creating indoor map database, Java OpenStreetMap [1] editor called JOSM [2] is used. JOSM will be used to create the map database (a combination of map floor and floor information) and details about room, corridor, door, stairs, and elevators. Figure 1 shows the map of our department floor, which is saved in a file in the map database. This map database will be available to download (using QR codes) near the entrance of a building and in other possible locations, as well as available online.


Indoor map database
For people with disabilities, it is important to know the route conditions, for example, the level of slope, stairs etc. By using map database, they can see all these information. In Fig. 2 we show the outdoor map of our school, near our department building.


Outdoor map database
4 Indoor Navigation System
4.1 A* Algorithm
In order to search for the shortest route to the destination, we use A* search algorithm [3]. In Fig. 3, is shown the calculation process of the algorithm. It calculates the shortest path from the start node to the goal node.


A*Algorithm
4.2 pgRouting
Using an Open Source Software, called path selection pgRouting [4], we select and display the optimal trace passage to navigate from the current location to destination. There are two types of points in our simulation system: can pass points and cannot pass points. Taking in consideration these points, the pgRouting selects the optimal route from the map database.
4.3 An Example of Navigation
Figure 4 shows an example of a navigation route obtained by the method described above. The current position is shown with a green flag and the destination with a red flag. The optimal route is displayed by a red line from the current position to the destination.


Example of navigation
4.4 Procedure of Indoor Navigation System
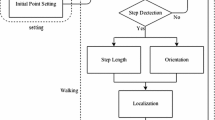
When the disabled person is inside the building, he/she uses his/her smartphone to read QR [5] code on the walls in the entrance of the building and download the information from the map database. When the disabled is outside the building, first he/she can download the map data from the website. After downloading the map data on the smartphone, the disabled choose the destination. Our navigation system displays the route conditions and chooses the best route. After choosing the best route, it starts the navigation to the destination point. If there is a problem with this route, the system alerts the user and suggests a new route. The flow chart of this procedure is shown in Chart 1.


Procedure of indoor/outdoor navigation
5 Simulation Results
In order to show the effectiveness of our system, we conduct simulations in our university for indoor and outdoor navigations.
5.1 Indoor-to-Indoor Navigation Simulation
For indoor-to-indoor navigation, we assume that a user want to move from our laboratory, which is located in D building 5th floor, to the classroom in C building 3rd floor in the campus of Fukuoka Institute of Technology. Then we simulate the route search by choosing to use the elevator without using stairs. Figure 5 shows the selected route after simulations.


Indoor-to-indoor navigation simulation
5.2 Outdoor-to-Indoor Navigation Simulation
For outdoor-to-indoor navigation, we suppose that a user wants to move from the entrance square of our university to the first floor of Building C. We use our simulation system to find the best route to destination. Assuming that the user is an unassisted person using a wheelchair, the high slope and stairs are avoided for reaching the destination (Fig. 6).


Outdoor-to-indoor navigation simulation
5.3 Distance Simulations
We also make outdoor measurements, using only one wheel sensor, without using GPS signal. We record the distance of three different routes: long route (A-route), short route (B-route), and curve route (C-route). We compare map results with measured results in the campus. The length of A-route from the map is 117.6 m and the distance measured is 116.6 m, so the error is 0.935 %. The length of the B-route from the map is 28.9 m and when measured is 28.6 m, so the error is 1.038 %. And the length of the C-route from the map is 24.3 m and measured in the campus is 24.1 m, so the error is 0.823 % (Fig. 7).


Outdoor routes, a. Long route b. Short route c. Curve route
6 Conclusions
In this paper, we have developed an indoor and outdoor navigation system for disabled. In our system, we use a wheel sensor and digital compass of smartphone to find the best route for a disabled to reach the destination. The simulation results show a correct route for disabled people from the current position to the destination. The error of each route in the outdoor simulation was less than 1 %, in general.
In the future, we would like to make extensive experiments using both the wheel sensor and digital compass. Then we will consider new algorithms to optimize the search procedure.
References
OSM OpenStreetMap, http://www.openstreetmap.org
JOSM is an extensible editor for OpenStreetMap, http://josm.openstreetmap.de
A-Star Algorithm, http://en.wikipedia.org/wiki/A*_search_algorithm
pgRouting, http://www.pgrouting.org/index.html
QR Code, http://en.wikipedia.org/wiki/QR_code
Smith P, Viol N, Wehrle K (2011) FootPath: accurate map-based indoor navigation using smartphones. In: Proceedings of indoor positioning and indoor navigation (IPIN-2011), pp 1–8, Aachen, Germany
Nakajima M (2011) Path planning using indoor map data generated by the plan view of each floor. In: Proceedings of the 25th international cartographic conference, CO-103, Paris, France, 3–8 July 2011
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2013 Springer Science+Business Media Dordrecht
About this paper
Cite this paper
Wattanavarangkul, N., Wakahara, T. (2013). Indoor Navigation System for Wheelchair Using Smartphones. In: Park, J.J., Barolli, L., Xhafa, F., Jeong, H.Y. (eds) Information Technology Convergence. Lecture Notes in Electrical Engineering, vol 253. Springer, Dordrecht. https://doi.org/10.1007/978-94-007-6996-0_25
Download citation
DOI: https://doi.org/10.1007/978-94-007-6996-0_25
Publisher Name: Springer, Dordrecht
Print ISBN: 978-94-007-6995-3
Online ISBN: 978-94-007-6996-0
eBook Packages: EngineeringEngineering (R0)