
Abstract
Simulation of continuous variables conditioned to meander structures is an important tool in the context of soil contamination assessment, namely, when the contamination is related with depositional sediments in water channels. Hence, this paper proposes using bi-point statistics stochastic simulation with local anisotropy trends to simulate continuous variables inside predefined channels. To accomplish this objective, the Direct Sequential Simulation (DSS) algorithm was modified to account for local anisotropy when searching for the simulation node. This methodological approach was applied to the spatial characterization of polluted sediments in a coastal lagoon located in the North of Portugal (Barrinha de Esmoriz).
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
1 Using Geostatistics for the Characterization of Meander Structures
Modelling curvilinear or meander structures can help to differentiate between different geological media and/or to condition the estimation/simulation of data to those structures. For petroleum applications, to recognize the shape of the structures can be a first step whilst for hydrological or environmental applications, meander forms can be visual and numerically recognized. In this situation, the issue will be to assess spatial distribution limited to those shapes.
One of the first attempts to model the morphology of geological curvilinear structures using geostatistics was made by Soares (1990), who proposed the use of local anisotropy directions to estimate (using morphological kriging) folded geological strata. This result was particularly important for petroleum applications, since it provided the possibility to identify different structures for the numerical modelling of reservoirs. This idea was used by Luis and Almeida (1997) and Xu (1997) to condition sequential simulation procedures for the characterization of sand channels geometry in a fluvial reservoir. Their work presented a pixel-based approach to simulate the geometry of sand channels taking into account morphological information and local continuity directions. When compared to object-based algorithms, which are an alternative way to reproduce curvilinear shapes, these pixel-based algorithms accounting for directional information were better suited to reservoir characterization due to the possibility to incorporate local field data. A first application of this concept to an environmental problem was presented by Caetano et al. (2004) who used wind directions as local anisotropy information to condition the estimation (kriging) of atmospheric pollutant distribution. Another example is the work presented by Stroet and Snepvangers (2005) that uses local anisotropy kriging to interpolate bathymetric data. These applications are based on two point statistics by using a kriging algorithm. Recently, multiple-point statistics (MPS) has been proposed for the characterization of meander structures and further variable simulation (see Strebelle, 2002). In the context of petroleum applications, simulation of meander structures with MPS consists of extracting patterns from training images and then reproducing those patterns conditioned to local field data (Strebelle, 2007). Also relying on a pixel-based sequential approach, MPS can be used for the simulation of categorical and continuous variables. However, modelling of continuous properties implies a discretization into a small number of classes to process simulation and a discrete-to-continuous transformation afterwards (Strebelle, 2007).
Thus, considering the present state-of-the-art, this paper aims to provide a solution for the simulation of continuous variables conditioned to meander structures. To achieve this goal, a pixel-based sequential algorithm (Direct Sequential Simulation; Soares, 2001) was used to reproduce bi-point statistics plus local anisotropy information (local directions and ratios).
2 Objectives
The aim of this paper is to present an application of Direct Sequential Simulation (DSS) to the characterization of a continuous variable with a spatial distribution conditioned to a meander structure, i.e., the algorithm had to be modified to account for local anisotropy information (direction of maximum continuity and anisotropy ratio). The problem of conditioning simulation to a specific curvilinear form was raised in the context of an environmental application related to the assessment of sediment contamination in a coastal lagoon, with a permanent water/sediment flow due to effluent water channels and the sea. A rationale was established to better approach the problem:
-
(i)
Pollutant contamination patterns in sediments usually follow preferential main flow paths. Hence, it is not advisable to simulate a pollutant concentration ignoring a preferential transport/accumulation path.
-
(ii)
Knowing the water flow regime enables us to determine a main flow direction (and thus the main direction of continuity for the dispersion contaminant path) and flow velocity can be related to the degree of anisotropy of such patterns.
Hence, once the main flow trends in the meanders have been defined, local anisotropy parameters can be estimated. For the presented case study, a satellite image was used to define main water flow paths and compute local directions and ratios.
3 Simulation of Continuous Variables Conditioned to Meander Structures
To determine the spatial distribution of a certain attribute conditioned to a curvilinear (or meander) structure, the use of stochastic simulation is a reliable option. Simulation algorithms not only allow for spatial assessment of an attribute but also provide information about the spatial uncertainty involved on that evaluation. DSS had been used for the spatial characterization of continuous variables related with several environmental problems such as air pollution (Soares and Pereira, 2007; Russo et al., 2008) or soil quality assessment (Franco et al., 2006; Horta et al., 2008). In these examples, the spatial correlation is evaluated across a Euclidean space, without differentiating sample locations (for example, samples exposed to different wind conditions or samples collected in different soil types). Thus, DSS was performed with global variogram parameters (direction, range and ratio of anisotropy), assumed to be representative for the entire the study area. Therefore, when it comes to conditioning the simulation to a meander structure – typical non-stationary situation – DSS is not able to reproduce the curvilinear shapes. One solution is to introduce local spatial trends representing local anisotropy variations that will reproduce the meander aspect of the structure where the variable is to be simulated.
3.1 Introducing Local Anisotropy in the DSS Algorithm
Let us consider the continuous variable \(\underline{Z}(\bf x)Z(x)\) with a global cumulative distribution function (cdf) F z (z) = Prob {Z(x) ≤ z}. The main sequence of methodological steps of DSS can be summarized as follows:
-
(i)
Define a random path over the entire grid of nodes x u (u = 1, …, N) to be simulated.
-
(ii)
Estimate the local mean and variance of z(x), identified, respectively, with the simple kriging estimate z∗SK(x) and variance σ2SK(x), conditioned to the original data z(x) and the previous simulated values zl(x).
-
(iii)
Define the interval Fz(z) to be sampled (defined by the local mean and variance of z(x)).
-
(iv)
Draw a value zl(x) from the cdf Fz(z).
-
(v)
Loop until all N nodes have been visited and simulated.
To solve the simple kriging system (step ii), experimental samples are selected with an elliptical search radius which is defined using global variogram parameters, as illustrated in Fig. 1. In practical terms, accounting for local anisotropy parameters, namely, direction of maximum continuity (given by azimuth θ) and anisotropy ratio (r), means changing the search radius from node to node to be simulated, as illustrated in Fig. 1. Thus, in step (ii), the matrix of data-to-data covariances and the vector of data-to-unknown covariances are calculated with corrected local covariances C θ, r (h) by the local values of θ(x) and r(x). The simple kriging estimate of local mean becomes a function of θ(x) and r(x). Note that to estimate a local cdf at given location x u only the local angle of x u is retained.

Representation of search radius definition for standard DSS and DSS with local anisotropy
The practical application of this idea raised other issues such as choosing the range of maximum continuity (search ellipse major axis a θ). For this paper purpose, it was assumed that a θremained constant and equal to the range of the global variogram. Only the minor range of the search ellipse was conditioned to the width of the meander structure in each simulated node. Thus, changes in anisotropy parameters determine that the variogram model is non-stationary.
4 Application
4.1 Study Area
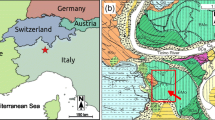
The methodology presented in this paper was developed within a project framework which aims to characterize soil/sediment contamination using state-of-the-art geostatistical models to assess spatial uncertainty. The study area is a coastal lagoon, located in the Portuguese Northern Region, named Barrinha de Esmoriz (Fig. 2). In terms of its ecological value, the Barrinha de Esmoriz was included in the list of the natural sites to be integrated in the Natura Network 2000. The lagoon is about 1,500 length and 700 m width, surrounded by dense vegetation (reeds and scrubs) and bordered by the dune. The sea is about 400 m distance and it connects with the lagoon through a 50 m width channel. Also, two water ditches flow into the lagoon, coming from the North and from the South, using the lagoon as a discharge point from the water basin.

Study area (Barrinha de Esmoriz) and Sampling point distribution
A sedimentation process has been taking place in the last few decades, reducing lagoon’s area and water depth. Also, there have been reports of serious pollution discharges from the Northern ditch, mainly industrial water discharges coming from the industrial sites located in the Northern part of the water basin. Evidence of this pollution has already been reported in a previous soil contamination assessment.
4.2 Soil Contamination Data
A previous soil contamination report (DHVFBO, 2001), developed to evaluate the degree and the extent of contamination in the lagoon’s sediments, contained information about heavy metal concentrations at 25 sampling points, distributed as shown in Fig. 2. The samples were collected in the first 1, 2 and 3 m, depending on field conditions. For simulation purposes, 64 data values were used, obtained for Arsenic (As), Copper (Cu), Cromium (Cr), Niquel (Ni) and Zinc (Zn). From this set, 39 values correspond to concentrations in the upper sediment layer. As an example, Zn concentration distribution in the three sampled layers is presented in Fig. 3. Also, Fig. 3 shows the sample locations at different layers, and the global histogram and mean variogram.

Zn spatial distribution, histogram, and mean variogram (spherical model, angular tolerance of 20∘)
4.3 Model Implementation and Results
For the assessment of sediment contamination with Zn, the following methodological steps were performed:
-
1.
Flow Direction Assessment: using a Quickbird satellite image (2006) the main trends of water flow channels were visually recognized and used to define flow direction vectors.
-
2.
Computing of Local Anisotropy: estimation of direction of maximum continuity (θ) and anisotropy ratio (r), using a kriging algorithm (Fig. 4).
-
3.
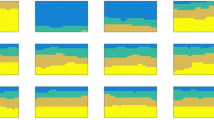
Contamination Assessment: simulation using DSS with correction for local anisotropies and uncertainty evaluation based on the variance of simulated images (Figs. 5 and 6).

Local Anisotropy, from left to right: (a) Flow main directions (b) Anisotropy ratio

One realization of Zn contamination, for the three sampled layers (using DSS with local anisotropies and connectivity flow path)

Uncertainty evaluation for the first layer
Regarding the practical implementation of DSS with local anisotropy to this case study, besides the modification introduced to account for local direction and ratio, also a connected sequential simulation path was imposed to improve the calculation of contaminant concentration. Instead of choosing one point x u in the random path to be simulated, a set of connected points x u , x 1,.. x np was chosen to be simulated in a row (Yao, 2007). Each point x u is in the direction if x u + 1 defined by the angle θ(x u ): arctg \(({x}_{u} - {x}_{u} + 1) = \theta ({x}_{i})\). The number np of connected points to be simulated is randomly defined at each sequential step.
To check the quality of simulation performance, histogram and variogram reproduction in the simulated images were verified and produce generally the results in Fig. 7.

Comparison between sample histogram and simulated images histogram
However, when comparing the sample variogram and the one obtained for the simulated images, some differences where detected (Fig. 8), mainly in what concerns the computed range. This result was expected since the variogram model imposed to the simulation resulted from the sample variogram computed in the Euclidean reference space while the simulated values result from the different water flow channels i.e. different local anisotropy relations and main directions. Hence the resulting variogram ranges computed after the simulation with local anisotropies tend to be smaller than the imposed model.

Comparison between sample variogram and simulated images variogram
5 Discussion and Conclusion
The presented method refers to the application of Direct Sequential Simulation to the characterization of a continuous variable with a spatial distribution conditioned to a meander structure. With this purpose, the DSS algorithm had to be modified to account for local anisotropy information (direction of maximum continuity and anisotropy ratio).The proposed methodology has shown quite promising results for the Barrinha de Esmoriz case study. It was possible to obtain a set of probable images for contamination dispersion along the lagoon channels thus identifying hot spots. However, uncertainty evaluation as presented in Fig. 6 shows high values for variance for the concentrations calculated along some parts of the channels (especially in the Northern part of the lagoon). This may be due to the lack of hard contaminant data along the channel paths. This information will be used to define an improved sampling campaign for the Barrinha de Esmoriz project.
Regarding further developments in the application of DSS using local anisotropy, this method can be generalized to the application to other fields, namely, the characterization of internal properties of reservoirs inside channel boundaries previously simulated by MP statistics.
Finally, a crucial point of this methodology is the determination of local directions and ratios of anisotropy. For the presented case study, as the main channel trends were visible in aerial photos, those parameters were directly inferred by the shape of meander structures. The main vectors defining main flow directions were first identified in the channels and, afterwards, they were populated for a regular grid of points covering the entire set of channels, using a kriging algorithm. Note that, instead of kriging, these main flow directions parameters could also be simulated (Luis and Almeida, 1997; Xu, 1997), principally when there is a high uncertainty about the meander’s shape and location.
References
Caetano H, Pereira MJ, Guimarães C (2004) Use of factorial kriging to incorporate meteorological information in estimation of air pollutants. In: Sanchez-Vila X, Carrera J, Gómez-Hernández J (eds) geoENV IV – Geostatistics for environmental applications. Kluwer, The Netherlands, pp 55–66
DHVFBO (2001) Technical Report “Soil and Groundwater Contamination Assessment in Barrinha de Esmoriz”
Franco C, Soares A, Delgado J (2006) Geostatistical modelling of heavy metal contamination in the topsoil of Guadiamar river margins (S Spain) using a stochastic simulation technique. Geoderma 136(3–4):852–864
Horta A, Carvalho J, Soares A (2008) Assessing the quality of the soil by stochastic simulation. In: Soares A, Pereira MJ, Dimitrakopoulos R (eds) geoENV VI – geostatistics for environmental applications. Springer, Berlin, pp 385–396
Luis JJ, Almeida JA (1997) Stochastic characterisation of fluvial sand channels. In: Baafi EY, Schofield NA (eds) Geostatistics Wollongong 96, vol. 1. Kluwer, The Netherlands, pp 477–488
Russo A, Trigo RM, Soares A (2008) Stochastic modelling applied to air quality space-time characterization. In: Soares A, Pereira MJ, Dimitrakopoulos R (eds) geoENV VI – geostatistics for environmental applications. Springer, Berlin, pp 83–93
Soares A (1990) Geostatistical estimation of orebody geometry: morphology kriging. Math Geol 22(7):787–802
Soares A (2001) Direct sequential simulation. Math Geol 33(8):911–926
Soares A, Pereira MJ (2007) Space–time modelling of air quality for environmental-risk maps: a case study in south Portugal. Comput Geosci 33(10):1327–1336
Strebelle S (2002) Conditional simulation of complex geological structures using multi-point statistics. Math Geol 34(1):1–21
Strebelle S (2007) Simulation of petrophysical property trends within facies geobodies. In: EAGE (ed) Petroleum Geostatistics 2007
Stroet C, Snepvangers J (2005) Mapping curvilinear structures with local anisotropy kriging. Math Geol 37(6):635–649
Xu W (1997) Conditional curvilinear stochastic simulation using pixel-based algorithms. In: Baafi EY, Schofield NA (eds) Geostatistics Wollongong 96, vol. 1. Kluwer, The Netherlands, pp 454–464
Yao T, Calvert C, Jones T, Foreman L, Bishop G (2007) Conditioning geologic models to local continuity azimuth in spectral simulation. Math Geol 39:349–354
Acknowledgements
This paper was produced in the context of Project “Soil contamination risk assessment” (PTDC/CTE-SPA/69127/2006) (financed by FEDER through the national Operational Science an Innovation Program 2010 with the support of the Foundation for Science and Technology).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer Science+Business Media B.V.
About this chapter
Cite this chapter
Horta, A., Caeiro, M.H., Nunes, R., Soares, A. (2010). Simulation of Continuous Variables at Meander Structures: Application to Contaminated Sediments of a Lagoon. In: Atkinson, P., Lloyd, C. (eds) geoENV VII – Geostatistics for Environmental Applications. Quantitative Geology and Geostatistics, vol 16. Springer, Dordrecht. https://doi.org/10.1007/978-90-481-2322-3_15
Download citation
DOI: https://doi.org/10.1007/978-90-481-2322-3_15
Published:
Publisher Name: Springer, Dordrecht
Print ISBN: 978-90-481-2321-6
Online ISBN: 978-90-481-2322-3
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)