
Abstract
In this paper, we study a solid transportation problem with uncertain cost and uncertain time, where the supplies, the demands, the conveyance capacities are regarded as uncertain in nature. For the first time we minimize the uncertain transportation time. According to the inverse uncertainty distribution, the model can be transformed into a deterministic form by taking expected value on objective functions and confidence level on the constraint functions. We solve the uncertain solid transportation problem by fuzzy programming technique and using the LINGO 13.0 software. Finally, this paper is illustrated by a numerical example on uncertain solid transportation problem to show the application of the model.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Transportation models are widely used in system distribution, job assignment, and other problems. In traditional TP, there are usually two kinds of constraints to be considered, namely, source constraint and destination constraint suggested by Balinski [1] in (1961). But in real situation, besides of these two constraints we have to deal with another constrain such as product type constraint or transportation mode constraint. For that reason the traditional TP turns into the solid transportation problem (STP) where we deal with three types of constraints. So as a generalization of the traditional TP, the STP was introduced by Haley [2] in 1962. Recently, the STP obtained much attention and many models and algorithms under both crisp environment and uncertain environment have been investigated. For examples, Bit et al. [3] presented the fuzzy programming model for a multi-objective STP, Mahapatra et al. [4] investigated a multi-objective stochastic transportation problem involving log-normal, Kaufmann [5] studied two kinds of uncertain STP, that is, the supplies, demands, and conveyance capacities are interval numbers and fuzzy numbers, respectively. Sheng [6] and Pandian et al. [7] provided a new method to find an optimal solution of the STP. More recently, Baidya et al. [8, 9] introduced safety measure in solid transportation problem under different environment.
In reality, due to changes in market supply and demand, weather conditions, road conditions and other uncertainty factors, uncertainty transportation problem is particularly important. Therefore studying uncertainty in transportation problem has both theoretical and practical significances. In order to construct model for STP in uncertain environment, we shall first introduce some knowledge of uncertainty theory. Uncertainty theory was founded by Liu [10] in 2007 and refined by Liu [11–13] in 2009 and 2012 respectively, which is a branch of mathematics based on normality, duality, subadditivity, and product axioms. Now, uncertainty theory has become a mathematical tool to model the indeterminate phenomenon in our real world. It has been developed to a fairly complete mathematical system [14]. So many models had been developed by many researchers in this area. Jimenez et al. [15] investigated uncertain solid transportation problem in 1998. Yuhong Sheng and Kai Yao studied a Transportation Model with Uncertain Costs and Demands in [16, 17]. Yuhong Sheng and Kai Yao presented Fixed Charge Transportation Problem and its Uncertain Programming Model in [18]. Cui and Sheng [19] also presented Uncertain Programming Model for Solid Transportation Problem and so on. In this paper, the STP is modeled based on uncertainty theory. In [20] Minimization of transportation time is considered by Bhatia et al. under crisp environment.
In this paper, we solve a bi-objective solid transportation problem (BOSTP) with uncertain cost and uncertain time, where the supplies, the demands, the conveyance capacities are regarded as fuzzy in nature. One task of this paper is to find a transportation plan such that the transportation cost and time are minimized. For the first time we minimize the uncertain transportation time. According to the inverse uncertainty distribution, the model can be transformed into a deterministic form by taking expected value on objective functions and confidence level on the constraint functions. We solve the uncertain solid transportation problem by fuzzy programming technique and using the LINGO 13.0 software. Finally, this paper is illustrated by a numerical example on uncertain solid transportation problem to show the application of the model.
1.1 Preliminaries
Uncertain Variable:
Definition (Liu [10]) An uncertain variable is a measurable function \(\xi \) from an uncertainty space (\(\Gamma , \mathcal {L}, \mathcal {M}\)) to the set of real numbers, i.e., for any Borel set B of real numbers, the set \(\{\xi \in B\}\) = \(\{\gamma \in \Gamma | \xi (\gamma ) \in B\}\) is an event.
Definition (Liu [10]) The uncertainty distribution \(\Phi \) of an uncertain variable \(\xi \) is defined by \(\Phi (x) = \mathcal {M} \{\xi \le x \}\) for any real number \(x\).
Definition An uncertainty distribution \(\Phi \) is said to be regular if its inverse function \(\Phi ^{-1}(\alpha )\) exists and is unique for each \(\alpha \in \) (0, 1).
Definition Let \(\xi \) be an uncertain variable with regular uncertainty distribution \(\Phi \). Then the inverse function \(\Phi _{\xi }^{-1}\)is called the inverse uncertainty distribution of \(\xi \).
Example: The inverse uncertainty distribution of normal uncertain variable is \(\mathcal {N}(e, \sigma )\) is \(\Phi ^{-1}(\alpha ) =e+\frac{\sigma \sqrt{3}}{\pi }\,\mathrm{ln}\,\frac{\alpha }{1-\alpha }\).
Definition (Liu [10]) The uncertain variables, \(\xi _{1}, \xi _{2}, \ldots , \xi _{n}\) are said to be independent if \(\mathcal {M}\{\bigcap _{i=1}^{n}(\xi _{i}\in B_{i})\}= \bigwedge _{i=1}^{n} \mathcal {M}\{(\xi _{i}\in B_{i}\}\) for any Borel sets B\(_{1}, \)B\(_{2}\), \(\ldots \), B\(_{n}\) of real numbers.
Definition (Liu [10]) Let \(\xi \) be an uncertain variable. Then the expected value of \(\xi \) is defined by E \([\xi ]=\int _{0}^{+\infty } \mathcal {M}\{\xi \ge r\}dr - \int _{-\infty }^{0}\mathcal {M}\{\xi \le r\}dr\), provided that at least one of the two integrals is finite. Let \(\xi \) be uncertain variable with uncertainty distribution \(\Phi \).
If the expected value exists, then E \([\xi ] = \int _{0}^{1} \Phi ^{-1}(\alpha )\)d\(\alpha \).
In fact, the expected value operator is linear.
Theorem 1 (Liu [10]) Let \(\xi _{1}, \xi _{2},\ldots , \xi _{n}\) be independent uncertain variables with uncertainty distributions \(\Phi _{1}, \Phi _{2},\ldots , \Phi _{n}\), respectively. If \(f\) is a strictly increasing function, then \(\xi = f (\xi _{1}, \xi _{2}, \ldots , \xi _{n})\) is an uncertain variable with inverse uncertainty distribution \(\Psi ^{-1}(\alpha )=f(\Phi _{1}^{-1} (\alpha ), \Phi _{2}^{-1}(\alpha ),\ldots , \Phi _{n}^{-1}(\alpha ))\).
Theorem 2 (Liu [10]) Let \(\xi _{1}, \xi _{2},\ldots , \xi _{n}\) be independent uncertain variables with uncertainty distributions \(\Phi _{1}, \Phi _{2},\ldots , \Phi _{n}\), respectively. If \(f\) is a strictly decreasing function, then \(\xi = f (\xi _{1}, \xi _{2},\ldots , \xi _{n})\)is an uncertain variable with inverse uncertainty distribution \(\Psi ^{-1}(\alpha ) = f(\Phi _{1}^{-1}(1-\alpha ), \Phi _{2}^{-1}(1-\alpha ),\ldots , \Phi _{n}^{-1}(1-\alpha ))\).
2 Uncertain Solid Transportation Model Formulation
Let there are \(m\) sources, n destinations and k conveyances of the STP. The amount of products in source i is denoted by \(a_{i}\), the minimal demand of products in destination \(j\) is denoted by \(b_{j}\), the transportation capacities of conveyance \(k\) is denoted by \(e_{k}\), the unit transportation cost is denoted by \(\xi _{ijk}, x_{ijk}\) be the quantity, where \(i=1,2,\ldots ,m,j = 1,2,\ldots ,n,k = 1,2,\ldots , k.\)
In order to model the above-mentioned uncertain solid transportation problem, the following notations are employed: \(y_{ijk} = {\left\{ \begin{array}{ll} 1, if x_{ijk} > 0 \\ 0, otherwise \end{array}\right. } \) where \(i = 1, 2,\ldots ,m, j = 1, 2,\ldots , n,k = 1, 2,\ldots , k\), respectively. This implies that, if the transportation activities are assigned from source \(i\) to destination \(j\) by \(k\) conveyance, then the corresponding time will be occurring.
To describe the problems conveniently, we denote the cost objective function and the time objective function of model in the following way,
where \(x, \xi , t\) denote the vectors consisting of \(x_{ijk}, \xi _{ijk}, t_{ijk}, i = 1, 2,\ldots , m, j = 1, 2,\ldots ,n,k = 1,2,\ldots ,l\) respectively. Therefore model Bi-Objective Solid Transportation Problem (BOSTP) can be stated as follows:
subject to
But due to the complexity of the real world, we may always meet uncertain phenomena in constructing mathematical model. For such condition, we generally add the uncertain variables to the model. Hence, in this paper, we assume that the unit cost, transportation time, the capacity of each source and that of each destination are all uncertain variables and denoted by \(\widetilde{\xi }_{ijk}, \widetilde{t}_{ijk}, \widetilde{a}_{i}, \widetilde{b}_{j}, \widetilde{e}_{k}\), respectively. Also we assume that all the uncertain variables \(\widetilde{a}_{i}, \widetilde{b}_{j}, \widetilde{e}_{k}, \widetilde{\xi }_{ijk}\), and \(\widetilde{t}_{ijk}\) are independent. Then the bi-objective STP becomes uncertain bi-objective STP.
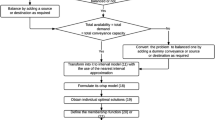
The expected-constrained programming model is constructed by [10]. The main idea of this model is to optimize the expected value of the objective function under the chance constraints.
Definition (Liu [21]) Assume that \(f(x, \xi )\) is an objective function, and \(g_{j}(x, \xi )\) are constraints functions, \(j = 1, 2,\ldots , k\). A solution \(x\) is feasible if and only if \(\mathcal {M}\{g_{j}(x, \xi )\le 0\}\ge \alpha _{j}\) for \(j = 1, 2,\ldots , n\). A solution \(x^{*}\) is an optimal solution to the uncertain programming model if \(E [f(x^{*}, \xi )] \le E[f(x, \xi )]\) if for any feasible solution \(x\).
By taking the expected value criterion on the objective functions and confidence level on the constraint functions, the above model turns into the following mathematical model:
subject to
where \(\alpha _{i}, \beta _{j}, \gamma _{k}\) are specified confidence levels for \(i =1, 2,\ldots , m, j= 1,2, \ldots , n, k = 1,2,\ldots ,l.\) The first constraint implies that total amount transported from source should be no more than its supply capacity at the confidence level \(\alpha _{i}\); the second constraint implies that the total amount transported from source \(i\) should satisfy the requirement of destination \(j\) at the credibility level \(\beta _{j}\); the third constraint states that the total amount transported by conveyance \(k\) should be no more than its transportation capacity at the confidence level \(\gamma _{k}\).
3 Crisp Equivalences of Models:
Since the proposed model have so many uncertain variables, to solve the models, we have to convert the models into crisp equivalences of models. Here, we shall induce the deterministic form for model taking advantage of some properties of expected value and uncertain measure in uncertainty theory.
Theorem 3 If \(\widetilde{a}_{i},\widetilde{b}_{j},\widetilde{e}_{k},\widetilde{\xi }_{ijk}\) and \(\widetilde{t}_{ijk}\), are independent uncertain variables with uncertainty distributions \(\Phi _{\widetilde{a}_{i}},\Phi _{\widetilde{b}_{j}},\Phi _{\widetilde{e}_{k}}, \Phi _{\widetilde{\xi }_{ijk}}\), and \(\Phi _{\widetilde{t}_{ijk}}\), respectively, then model (2) is equivalent to the following model
subject to
Proof: Since \(\widetilde{\xi }_{ijk}, \widetilde{t}_{ijk}, \widetilde{a}_{l}, \widetilde{b}_{j}, \widetilde{e}_{k}\) are independent uncertain variables with uncertainty distributions \(\Phi _{{\xi }_{ijk}}, \Phi _{{t}_{ijk}}, \Phi _{{\widetilde{a}}_{l}}, \Phi _{{\widetilde{b}}_{j}}, \Phi _{{\widetilde{e}}_{k}}\) respectively. According to the linearity of expected value operator, we have
where \(E[\widetilde{\xi }_{ijk}] = \int _{0}^{1} \Phi _{{\xi }_{ijk}}^{-1} (\alpha ) d\alpha \), \(i = 1, 2,\ldots , m, j = 1, 2,\ldots , n, k = 1, 2,\ldots , l\).
According to the Theorems 1 and 2, the constraints are converted as follows: the first constraint of the model (2)
is equivalent to
the second constraint of the model (2)
is equivalent to
and the third constraint of the model (2)
is equivalent to
the result follows from immediately. Assume that all uncertain variables are normal uncertain variables,
4 Techniques to Solve a Crisp Bi-Objective Linear/Nonlinear Problem:
To solve the transformed crisp forms of the model we used the fuzzy programming technique, where we first find the lower bound as \(L_{p}\) and the upper bound as \(U_{p}\) for the \(p\)th objective function \(Z_{p}\), \(p = 1, 2,\ldots , P\) here \(U_{p}\) is the highest acceptable level of achievement for objective \(p\), \(L_{p}\) the aspired level of achievement for objective \(p\) and \(d_{p} = U_{p} - L_{p}\) the degradation allowance for objective \(p\). When the aspiration levels for each of the objective functions have been specified, a fuzzy model is formed and then the fuzzy model is converted into a crisp model. The solution of BOSTP can be obtained by the following steps.
Step-1: Solve the BOSTP and as a single objective STP using each time only one objective and ignore other objective and taking the constraints.
Step-2: From the results of step-1, determine the corresponding value for every objective functions at each solution.
Step-3: Find upper and lower bounds (i.e., \(U_{p}\) and \(L_{p}\)) for \(p\)th objective from the two objective values derived in step-2. We construct a payoff matrix, according to every objective w.r.t. each solution. The payoff matrix in the main program gives the set of nondominated solution which should be in the following table:
Z\(_{1} Z_{2} Z_{3}\) | \(\ldots \) \(\ldots \) | Z\(_{p}\) | ||
|---|---|---|---|---|
\(x^{(1)}\) | Z\(_{11} Z_{12} Z_{13}\) | \(\cdots \) \(\cdots \) | Z\(_{1p}\) | |
\(x^{(2)}\) | Z\(_{21} Z_{22} Z_{23}\) | \(\cdots \) \(\cdots \) | Z\(_{2p}\) | |
\(\cdot \) | \(\cdot \) | \(\cdot \) | \(\cdot \) | \(\cdot \) |
\(\cdot \) | \(\cdot \) | \(\cdot \) | \(\cdot \) | \(\cdot \) |
\(x^{(p)}\) | Z\(_{p1} Z_{p2} Z_{p3}\) | \(\cdots \cdots \) | Z\(_{pp}\) |
where \(x^{(1)}\), \(x^{(2)}\), \(x^{(3)}\), \(\ldots \ldots ,\) \(x^{(p)}\) is the ideal solution for the objective \(Z_{1}, Z_{2}, Z_{3}, \ldots \ldots , Z_{p}\) respectively.
Let \(Z_{ij} = Z_{j}(x^{i}),\) \(i= 1,2, \ldots \ldots , p\) and \(j=1,2 \ldots \ldots , p\) are the minimum value (best) for each objective \(Z_{r}, r = 1,2, \ldots p\).
Step-4: To find the best (\(L_{r}\)) and worst for each objectives corresponding to the set of solution, i.e., \(L_{r} = Z_{rr}\) and \(U_{r} = max_{r{\ge }1}\) \(\{Z_{1r},Z_{2r}, \ldots \ldots , Z_{pr}\}.\) For simplicity, \(Z_{r}\le L_{r} = 1, 2, 3, \ldots \ldots , p\) and constraints.
Step-5: Then the proposed model converted to the following crisp model:
and the constraints (4)–(6) along with \(x_{ijk}\ge 0\, \forall i, j, k\) and \(\lambda \ge 0\).
Fuzzy programming technique with exponential membership function (MF):
An exponential membership function is defined by
where, \(\Psi _{p}(X) = \frac{(Z_{p}-L_{p})}{(U_{p}-L_{p})}, p = 1, 2, \ldots , P, S\) is a nonzero parameter prescribed by the decision-maker.
Use of exponential MF will give the following equivalent crisp model:
and the constraints (4)–(6) along with \(x_{ijk}\ge 0\, \forall i, j, k\) and \(\lambda \ge 0\).
Fuzzy programming technique with hyperbolic membership function:
A hyperbolic membership function is defined by
where \(\alpha _{p}= \frac{6}{(U_{p}-L_{p})}\)
Use of hyperbolic MF will give the following equivalent crisp model:
and the constraints (4)–(6) along with \(x_{ijk} \ge 0 \,\forall \, i,\, j,\, k\) and \(\lambda \ge \) 0.
5 Numerical Experiments
Suppose that there are four coal mines to supply the coal for six cities. During the process of transportation, two kinds of conveyances are available to be selected, i.e., train and cargo ship. Now, the task for the decision-maker is to make the transportation plan for the next month in advance such that the transportation cost and the transportation time is minimum. At the beginning of this task, the decision-maker needs to obtain the basic data, such as supply capacity, demand, transportation cost of unit product, transportation time, and so on. In fact, since the transportation plan is made in advance, we generally cannot get these data exactly. For this condition, the usual way is to obtain the uncertain data by means of experience evaluation or expert advice and the corresponding uncertain data are as follows (Tables 1 and 2):
5.1 Input Data
Then the model (3) is equivalent to the following model:
subject to:
Therefore with above input data the problem can be reformed as:
For all \(i, j, k, x_{ijk}\ge 0;\)
Next to solve the problem we use the LINGO 13.0 software and the procedure for that is discussed here.
Solution Methodologies:
Using the fuzzy programming technique first we find out the minimum and maximum values of the first objective function ignoring the second objective function. Similarly we find the minimum and maximum values for the second objective function to form the payoff matrix as follows:
Then we get, L\(_{1} =\) min (4106.792, 4184.332) = 4106.792, L\(_{2} =\) min (4392.708, 4636.050) \(=\) 4392.708, U\(_{1} =\) max (4106.792, 4184.332) \(=\) 4184.332 and U\(_{2} =\) max (4392.708, 4636.050) \(=\) 4636.050.
If we use linear membership function, then crisp model can be presented as follows:
and the constraints (4) to (6) along with \(x_{ijk}\, \ge \) 0 for all \(i, j, k\).
Result with linear, exponential and hyperbolic membership functions
Using the linear MF, exponential MF given by (7) and hyperbolic membership functions given by (8), respectively, and proceedings as before, we get the following optimal results:
MF | Optimal cost (\(Z_{{1}^{\star }}\)) | Optimal time (\(Z_{{2}^{\star }}\)) | \(x_{{ijk}^{\star }}\) | \(\lambda ^{\star }\) |
|---|---|---|---|---|
Linear MF | 4128.53 | 4460.92 | \({x_{122}}=\) 2.41, \({x_{142}}=\) 4.48, \({x_{162}}=\) 16.29, \({x_{222}}=\) 6.56, \({x_{341}}=\) 6.37, \({x_{312}}=\) 23.21, \({x_{441}}=\) 8.37, \({x_{451}}=\) 17.21, \({x_{221}}=\) 6.24, and all others \({x_{ijk}}\) are zero | 0.72 |
Exponential MF | 4145.56 | 4440.1 | \({x_{122}}=\) 4.31, \({x_{142}}=\) 1.26, \({x_{441}}=\) 11.47, \({x_{222}}=\) 4.89, \({x_{341}}=\) 6.48, \({x_{312}}=\) 23.09, \({x_{451}}=\) 14.11, \({x_{221}}=\) 6.01, \({x_{152}}=\) 3.10, \({x_{162}}=\) 13.47, \({x_{231}}=\) 0.12 and all others \({x_{ijk}}\) are zero | 0.38 |
Hyperbolic MF | 4145.56 | 4440.1 | \({x_{122}}=\) 4.31, \({x_{142}}=\) 2.12, \({x_{162}}=\) 13.93, \({x_{222}}=\) 9.38, \({x_{341}}=\) 8.72, \({x_{312}}=\) 20.85, \({x_{441}}=\) 8.37, \({x_{451}}=\) 17.21, \({x_{221}}=\)1.53, \({x_{231}}=\) 2.36 and others \({x_{ijk}}\) are zero | 0.50 |
6 Conclusion
This paper mainly investigated a new uncertain cost and uncertain time solid transportation problem based on uncertainty theory. As a result, a decision model under criteria was presented. The construction of expected-constrained programming model was according to the idea of expected value of the objective under the chance constraints
In this paper, BOSTP under uncertain environment is solved by using fuzzy programming technique with linear, exponential, and hyperbolic membership functions. It has been found that for BOSTP under uncertain environment with multi-objective functions the optimal solutions do not change if we use exponential and hyperbolic membership functions but is different compared to if we use a linear membership function. For the problem we find that the first objective functions, i.e., Z\(_{1}\) is minimum with respect to the linear membership function and Z\(_{2}\) is minimum when the membership function is nonlinear.
References
Balinski, M.L.: Fixed-cost transportation problems. Naval Res. Logistics Q. 8, 41–54 (1961)
Haley, K.B.: The solid transportation problem. Oper. Res. 11, 446–448 (1962)
Bit, A.K., Biswal, M.P., Alam, S.S.: Fuzzy programming approach to multi-objective solid transportation problem. Fuzzy Sets Syst. 57, 183–194 (1993)
Mahapatra, D., Roy, S., Biswal, M.: Multi-objective stochastic transportation problem involving log-normal. J. Phys. Sci. 14, 63–76 (2010)
Kaufmann, A.: Introduction to The Theory of Fuzzy Subsets, vol. I. Academic Press, New York (1975)
Sheng, Y.: A solid transportation model based on uncertainty theory. Information 15(12), 342–348 (2012)
Pandian, P., Anuradha, D.: A new approach for solving solid transportation problems. Appl. Math. Sci. 4, 3603–3610 (2010)
Baidya, A., Bera, U.K., Maiti, M.: Multi-item solid transportation problem with safety measure, OPSEARCH. Springer (2013). doi:10.1007/s12597-013-0129-2
Baidya, A., Bera, U.K., Maiti, M.: Multi-item interval valued solid transportation problem with safety measure under fuzzy-stochastic environment. Int. J. Transp. Secur., Springer (2013) doi:10.1007/s12198-013-0109-z
Liu, B.: Uncertainty Theory: A Branch of Mathematics for Modeling Human Uncertainty. Springer, Berlin (2010)
Liu, B.: Some research problems in uncertainty theory. J. Uncertain. Syst. 3, 3–10 (2009)
Liu, B.: Theory and Practice of Uncertain Programming, 2nd edn. Springer, Berlin (2009)
Liu, B.: Why is there a need for uncertainty theory? J. Uncertain Syst. 6, 3–10 (2012)
Liu, Y., Ha, M.: Expected value of function of uncertain variables. J. Uncertain Syst. 4, 181–186 (2010)
Jimenez, F., Verdegay, J.L.: Uncertain solid transportation problems. Fuzzy Sets Syst. 100, 45–57 (1998)
Sheng, Y., Yao, K.: Fixed charge transportation problem in uncertain environment. Ind. Eng. Manag. Syst. 11, 183–187 (2012)
Sheng, Y., Yao, K.: A transportation model with uncertain costs and demands. Inform. Int. Interdiscip. J. 15, 3179–3186 (2012)
Yang, L., Feng, Y.: A bi-criteria solid transportation problem with fixed charge under stochastic environment. Appl. Math. Model. 31, 2668–2683 (2007)
Cui, Q., Sheng, Y.: Uncertain programming model for solid transportation problem. Information in press (2012)
Bhatia, H., Swarup, K., Puri, M.: Time minimizing solid transportation problem. Math. Oper. Stat. 7, 395–403 (1976)
Liu, B.: Uncertainty Theory, 2nd edn. Springer, Berlin (2007)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2015 Springer India
About this paper
Cite this paper
Das, A., Bera, U.K. (2015). A Bi-Objective Solid Transportation Model Under Uncertain Environment. In: Chakraborty, M.K., Skowron, A., Maiti, M., Kar, S. (eds) Facets of Uncertainties and Applications. Springer Proceedings in Mathematics & Statistics, vol 125. Springer, New Delhi. https://doi.org/10.1007/978-81-322-2301-6_20
Download citation
DOI: https://doi.org/10.1007/978-81-322-2301-6_20
Publisher Name: Springer, New Delhi
Print ISBN: 978-81-322-2300-9
Online ISBN: 978-81-322-2301-6
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)