
Abstract
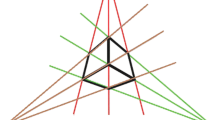
For images taken in man-made scenes, vanishing points and focal length of camera play important roles in scene understanding. In this paper, we present a novel method to quickly, accurately and simultaneously estimate three orthogonal vanishing points (TOVPs) and focal length from single images. Our method is based on the following important observations: If we establish a polar coordinate system on the image plane whose origin is at the image center, angle coordinates of vanishing points can be robustly estimated by seeking peaks in a histogram. From the detected angle coordinates, altitudes of a triangle formed by TOVPs are determined. Novel constraints on both vanishing points and focal length could be obtained from the three altitudes. By using the constraints, radial coordinates of TOVPs and focal length can be estimated simultaneously. Our method decomposes a 2D Hough parameter space into two cascaded 1D Hough parameter spaces, which makes our method much faster and more robust than previous methods without losing accuracy. Enormous experiments on real images have been done to test feasibility and correctness of our method.
Access provided by Autonomous University of Puebla. Download to read the full chapter text
Chapter PDF
Similar content being viewed by others


References
Barnard, S.T.: Interpreting perspective images. Artificial Intelligence 21, 435–462 (1983)
Caprile, B., Torre, V.: Using vanishing points for camera calibration. International Journal of Computer Vision 4, 127–140 (1990)
Cipolla, R., Drummond, T., Robertson, D.: Camera calibration from vanishing points in images of architectural scenes. In: Proc. British Machine Vision Conference, vol. 2, pp. 382–392 (1999)
Van Gool, L., Zeng, G., Van Den Borre, F., Müller, P.: Towards mass-produced building models. In: Photogrammetric Image Analysis, PIA (2007)
Hartley, R., Zisserman, A.: Multiple view geometry in computer vision. Cambridge University Press, Cambridge (2003)
Van Den Heuvel, F.A.: Vanishing point detection for architectural photogrammetry. International Archives of Photogrammetry and Remote Sensing 32(Part 5), 652–659 (1998)
Hedau, V., Hoiem, D., Forsyth, D.: Recovering the spatial layout of cluttered rooms. In: Proc. International Conference on Computer Vision (2009)
Kong, H., Audibert, J., Ponce, J.: Vanishing point detection for road detection. In: Proc. IEEE Conf. Computer Vision and Pattern Recognition, pp. 96–103 (2009)
Košecká, J., Zhang, W.: Video compass. In: Heyden, A., Sparr, G., Nielsen, M., Johansen, P. (eds.) ECCV 2002. LNCS, vol. 2353, pp. 657–673. Springer, Heidelberg (2002)
Rother, C.: A new approach for vanishing point detection in architectural environments. Image and Vision Computing 20, 647–655 (2002)
Shufelt, J.A.: Performance evaluation and analysis of vanishing point detection Techniques. IEEE Trans. Pattern Analysis and Machine Intelligence 21(3), 282–288 (1999)
Tardif, J.: Non-iterative approach for fast and accurate vanishing point detection. In: Proc. International Conference on Computer Vision (2009)
Tuytelaars, T., Van Gool, L., Proesmans, M., Moons, T.: The cascaded Hough transform as an aid in aerial image interpretation. In: Proc. International Conference on Computer Vision, pp. 67–72 (1998)
Zhang, Z.: Flexible camera calibration by viewing a plane from unknown orientations. In: Proc. International Conference on Computer Vision (1999)
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2010 Springer-Verlag Berlin Heidelberg
About this paper
Cite this paper
Li, B., Peng, K., Ying, X., Zha, H. (2010). Simultaneous Vanishing Point Detection and Camera Calibration from Single Images. In: Bebis, G., et al. Advances in Visual Computing. ISVC 2010. Lecture Notes in Computer Science, vol 6454. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-17274-8_15
Download citation
DOI: https://doi.org/10.1007/978-3-642-17274-8_15
Publisher Name: Springer, Berlin, Heidelberg
Print ISBN: 978-3-642-17273-1
Online ISBN: 978-3-642-17274-8
eBook Packages: Computer ScienceComputer Science (R0)