
Abstract
The article presents an approach to the organization of a flying network among mobile communication subscribers based on WiFi (VoWiFi) technology in a disaster area where telecommunication infrastructure is completely or partially destroyed. The flying network is organized on the basis of unmanned aerial vehicles (UAVs), which interact with each other based on IEEE 802.11p wireless technology and with mobile subscribers based on IEEE 802.11n/ac wireless technologies. The interaction process between subscribers and UAVs is presented as a queuing system. Based on the developed model were measured and obtained network delay parameters and its value did not exceed 100 ms. The fulfillment of this condition was achieved by varying the number of UAVs and the channel load parameters. A series of numerical experiments showed the permissible number of UAVs to provide an acceptable quality of voice transmission between subscribers that are in the UAV coverage area.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In the last years, global climate change has led to an increase in the frequency and severity of natural disasters, such earthquakes, wildfire, tsunamis, etc. Consequently, these natural disasters result in the complete or partial destruction of telecommunication infrastructure. In this regard, the implementation of rescue operations is very difficult due to the lack of communication between emergency services, as well as the connection between emergency services and the sufferers. Considering that the deployment of a wireless communication network between emergency services becomes a priority, a connection needs to be quickly implemented by using advanced technologies.
The research of flying networks has been devoted to many research works, which deal with UAVs interaction without connection to the base station of the communication operator [1,2,3,4]. To solve this problem, a concept of a rapidly deployable flying network for emergencies was introduced [5,6,7,8]. According to the proposed concept, to ensure UAVs interaction in order to provide maximum coverage of the destroyed area it is necessary to organize a flying network that support network mesh topology. In this network, each UAV can be considered as a mobile heterogeneous gateway [9, 10]. A mobile heterogeneous gateway is a network device or relay system designed to provide interoperability between two information networks that have different characteristics, use different protocol sets, and support various data transmission technologies. Thus, each UAV is supposed to set a heterogeneous gateway that allows encapsulating data from/to mobile phones (IEEE 802.11n/ac) into the data transferred between the UAVs (IEEE 802.11p).
2 Related Work
During the last few years, a number of approaches and contributions about communication and networking in the flying network are proposed.
In this paper [11], the authors announced that in the near future, flying network will play an important role in everyday life. They found that it is really difficult to operate and manage the air traffic due to the great number of unmanned aerial vehicles (UAVs). Reliable communication links is necessary to support the operators and the unmanned traffic management system. It also depends on the unmanned traffic management system structure and the number of UAVs. The paper mentioned that there are two types of flying network architectures, which are cellular and ad-hoc; UAV-to-UAV direct links are needed to allow real-time information exchange and suggested IEEE 802.11p standard is a real possible choice for UAVs communication in flying network.
The comparison of different communication network architectures for flying network was considered in the paper [12]. The authors discussed advantages and disadvantages of each one. They made a review of legacy and next-generation data link systems for communications between the ground station and a UAV, between UAVs. Additionally, the authors mentioned that next-generation data link systems will be used for decentralized communications for UAV networks. They concluded that a UAV ad-hoc network is suitable to network groups of UAV and a multi-layer UAV ad-hoc network is more suitable to multiple groups of heterogeneous UAV.
The communication requirements for applications in micro UAV networks are discussed in the paper [13]. The authors mentioned that a set of candidate wireless technologies can be exploited for micro UAV networks such as IEEE 802.15.4, IEEE 802.11, 3G/LTE, and infrared. They considered a combination of IEEE 802.11 and XBee-Pro is suggested as a communication link for small networks but it cannot provide reliable, time-critical communication for large networks.
In [14] the role of meshed airborne communication networks in the operational performance of small UAV was proposed. The authors mentioned that only meshed ad-hoc networking, where nodes in the network are able to self-organize to act as relays, can meet the communication demands for the large number of small UA expected to be deployed in future. They presented experimental results to show the feasibility of meshed airborne communication using the heterogeneous unmanned aircraft system and a net-centric operation of multiple cooperating UAV over mesh network is possible.
The authors in [15] developed a framework called UAVNet for the autonomous deployment of a flying Wireless Mesh Network using small quadrocopter-based UAVs as a flying node. They assumed that the flying wireless mesh nodes can be interconnected to each other and building an IEEE 802.11s wireless mesh network. In order to communicate with ground stations, i.e. notebooks, the flying wireless mesh nodes use IEEE 802.11b/g wireless standard. The authors aim at interconnecting two end systems by setting up an airborne relay, consisting of one or several flying wireless mesh nodes. At the end, they mentioned that UAVNet can be used to deploy a complete communication network in emergency and disaster recovery scenarios.
The authors in [16] considered the use of LTE for transferring data from and to UAV in a suburban environment. By means of measurements and simulations, the article analyzed the impact of interference and path loss when transmitting data to and from the UAV. They archived results that interference is a major limiting factor and that LTE might not be used effectively in the flying network.
A research on long range data transmission on flying sensor network was considered in [10]. The authors analyzed the problem of data delivery with the terrestrial segment of the flying sensor network over long distances using UAVs such as repeater chain. In the terrestrial segment IEEE 802.15.4 (6LoWPAN protocol) was used for interaction nodes and in the flying segment IEEE 802.15.4g (LoRaWAN protocol) is used for UAV interaction. At the end, they found delay and packet loss, occurring in the all stations of transmission network at different data rates and also the optimal data rate of network was found.
In summary, the articles reviewed above show that the use of UAV as a gateway in connection to ground stations is feasible and necessary. However, when natural disasters occur, telecommunication infrastructure in the disaster area is completely or partially destroyed, how emergency services can contact the victim is not mentioned. In this paper, we propose an approach to the organization of a flying network among mobile communication subscribers based on WiFi (VoWiFi) technology in a disaster area where telecommunication infrastructure is completely or partially destroyed, which will be discussed in the next sections.
3 Data Transmission Technologies for Flying Networks
Currently, with the transition to five generation communication networks 5G/IMT-2020, a number of technologies will play an important role in supporting of emergency services. One of the fundamental and widely used radio technologies at network access layer is wireless local area networks Wi-Fi.
As mentioned above, we assume that all telecommunication infrastructure in the disaster area is destroyed. Traditional GSM networks, which are used for voice communication, proposed the use of base stations whose weights and dimensions do not allow their implementation on UAVs. In addition, the delivery of new base stations to the disaster area, is a logistical task. Thus, the organization of communication among mobile subscribers cannot be solved on the basis of GSM technology. Today, one of the most effective solutions is the organization of interaction with mobile subscribers of GSM networks via Wi-Fi based on voice over Wi-Fi (VoWi-Fi) applications [17,18,19]. To implement this approach, it is necessary that the entire disaster area be fully covered with a Wi-Fi radio signal. In order to achieve this goal, we propose the use of a flying network that consists of UAVs, which are mobile access points and relaying the received/transmitted data to a base station that operates in normal mode [9, 20, 21]. This approach allows organizing a hierarchical wireless ad-hoc network with mobile nodes. The role of the base station for subscribers will be performed by a Wi-Fi access point on board of a UAV that supports IEEE 802.11n or IEEE 802.11ac. Due to fact that VoWi-Fi technology has spread in a large number of different mobile phones models, it can be assumed that this approach will allow making calls over Wi-Fi in the organization of a flying network supporting this technology. It is also worth noting that all calls are made through the operator with the numbering and identification of mobile network subscribers.
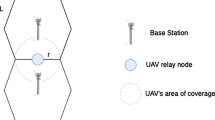
Figure 1 shows the architecture of the flying network for emergencies, in which one or more UAVs are assumed to be used in the flying segment. This figure reflects the organization concept of communication and interaction of all elements of the system.

The architecture of the flying network for emergencies
According to Fig. 1, the architecture of the voice service over WiFi is represented by the following segments:
-
Terrestrial segment: This segment includes subscriber terminals (telephones) that have some network interfaces, such as Bluetooth, WiFi, GSM, LTE/4G, etc. At an acceptable distance, subscriber terminals can interact directly with each other, such as device-to-device communication (D2D Communication). Currently, some wireless technologies are known, such as Bluetooth, WiFi Direct, WiFi Hotspot, which allow data exchange between two devices as D2D communication. When using such technologies, the communication distance is limited. Therefore, for providing communication between two subscribers, which are at a large distance, active communication between several relays is proposed, in our case relays are UAVs with various wireless interfaces. In this case, subscriber terminals with the supporting IEEE 802.11n/ac technologies are WiFi-stations. Thus, IEEE 802.11n/ac technologies provide connection of subscriber terminals to the flying segment.
-
Flying segment: This segment is built on the basis of UAV networks, which also support several network interfaces, such as IEEE 802.11p, IEEE 802.11n, IEEE 802.11ac, and wireless telemetry. In this architecture, the flying segment must provide the communication with the terrestrial segment, the connection between the UAV, and the connection with the Operator Center. Figure 1 shows that the terrestrial segment and the flying segment are connected by using the IEEE 802.11n/ac technology, and the connection of UAVs uses IEEE 802.11p technology.
-
Operator segment: In this segment, there is a connection between the UAV group and the Operator Center, which determines the access of subscriber terminals to the service, i.e. whether there is a possibility of communication with another subscriber. Each subscriber terminal must be identified in the Operator Center. One of the UAV group is accessible to the base station via wireless technology IEEE 802.11p, as shown in Fig. 1.
4 Emergency Flying Network Queuing Model
Assume that in the disaster area subscriber 1 wants to call subscriber 2 via VoWi-Fi using the UAV group. An example of such a call may be the connection of an emergency service officer with subscribers in the disaster zone. According to mobile phones functioning algorithms, in the absence of communication with the base station, the phones switch to scanning mode of available networks. Scanning in the area of a natural disaster will help discover subscribers who potentially can be under the rubble waiting for help.
At the beginning, the call connection process between two subscribers is carried out by an operator, i.e. each UAV is connected to a mobile network operator, which allows the collection of subscriber data. According to the interworking scheme, a call can be made only after the operator sent a connection confirmation. After that, a call between two subscribers will be performed through a chain of UAVs interacting with each other. In this paper, we consider the process of voice traffic transmission from subscriber 1 to subscriber 2 after the connection is established. In order to make a call with an acceptable quality of perception, it is necessary to ensure the voice transmission delay is not more than 100 ms [22].
Hence, the proposed service model requires the delivery time of voice traffic not more than 100 ms, as one of the basic parameter of quality of service. When considering the proposed architecture (Fig. 1), obviously, that the delivery delay of a packet from the first subscriber to the second subscriber is the total time that passes through the terrestrial segment and the flying segment in the condition of the established connection. When implementing a specific communication network in each segment, their effects on the delivery delay in more detail are discussed. With this architecture, obviously, that the delivery time depends on the conditions of the terrestrial segment, such as subscriber terminals, network interfaces at terminals, the degree of breaking in place, and etc. And the delivery time depends on the conditions of the flying segment, such as the method of UAV networks organization, the data transmission technologies. In this paper, we consider the requirement of the number of UAVs for voice delivery from the first subscriber to the second subscriber. We describe the processing of voice delivery by a multiphase queuing system model. In the connection between two subscribers, each UAV is presented by a single-phase queuing system.
A flying network consisting of UAVs is represented as a multiphase queuing system [6, 7, 10, 23], which is shown in Fig. 2. Each UAV receives, processes and sends subscriber data and voice traffic to the next UAV node based on the service message exchange. The voice traffic, which is generated by the subscriber terminals, go into every UAV node. Because each UAV node is a single-phase queuing system, voice traffic is waited in queues in the path of departure to the subscriber terminal of destination. Therefore, the choice of the queuing models, which is used in each UAV node, significantly affects the delay in the transmission of voice between two subscribers.
It is assumed that the incoming streams to each UAV have the same properties. Accordingly, it is possible to compute the average delivery time for each subsystem of the multiphase queuing system for the models under consideration. For simplicity, we consider 2 types of queuing system models M/M/1 and G/G/1. The multiphase queuing system model with n queuing phases is shown in Fig. 3. The multiphase queuing system is understood that each UAV receives processes and sends subscriber’s information and voice to the next UAV node.
Figure 3 shows that the voice transmission delay from subscriber 1 to subscriber 2 is represented by the sum of all average interarrival times in all phases, which is represented by formula (1).
where:
-
\(\overline{T}\) – the sum of average interarrival time in all phases,
-
\(\overline{T_1}\) – the average interarrival time in the first phase (between subscriber 1 and UAV 1) (ms),
-
\(\overline{T_j}\) – the average interarrival time between UAVs (ms),
-
\(\overline{T_n}\) – the average interarrival time in the last phase (between UAV n and subscriber 2) (ms),
-
n – the number of UAVs.

Multiphase queuing model of a flying network for voice transmission

Multiphase queuing model
According to the formula (1), the number of UAVs, which provide the transmission time of voice traffic between two subscribers with a delay not exceeding 100 ms, can be found. It means that \(\overline{T}=\overline{T_1} + \sum _{j=1}^n \overline{T_j} + \overline{T_n} \le 100 \) ms. We assume that the average interarrival time between subscribers and UAVs are the same (\(\overline{T_1}=\overline{T_n} \)) and the average interarrival time between UAVs are also the same. Consequently, the number of UAVs can be found by expression (2):
System load intensity can be found by formula (3):
where:
-
\(\lambda _i\) – The average arrival rate (packet/ms),
-
\(\mu _i\) – The average service rate (packet/ms),
-
\(\overline{t_i}=\frac{1}{\mu _i}\) – The average service time (ms).
When considering the two types of queuing systems M/M/1 and G/G/1, we will use formulas to calculate the packet processing time [17]. Formulas (2) and (3) show the average time of delivery, passing through the multiphase queuing system i for the models M/M/1 and G/G/1. For the M/M/1 system, the average delivery time can be calculated using formula (4):
where:
-
\(\overline{T_i}\) – the average interarrival time in phase i (ms),
-
\(\overline{w_i}\) – the average time spent waiting in the queue (ms),
-
\(\overline{t_i}\) – the average service time (ms).
For the G/G/1 system, the average delivery time can be calculated using formula (5):
where:
-
\(\overline{T_i}\) – the average interarrival time in different phases (ms),
-
\(\overline{w_i}\) – the average time spent waiting in the queue (ms),
-
\(\overline{t_i}\) – the average service time (ms),
-
\(\overline{\sigma _a}^2\) – the variance of the time interval between arrivals,
-
\(\overline{\sigma _b}^2\) – the variance of service time,
-
a – the average time interval size between arrivals.
As mentioned above, the voice transmission between subscribers and UAVs can be achieved by IEEE 802.11n data transmission standard (with data rate \(b_n=300\) Mbps) or IEEE 802.11ac (with data rate \(b_{ac}=650\) Mbps) and for the voice transmission between UAVs, IEEE 802.11p data transmission standard (with data rate \(b_p=12\) Mbps). The data rates are given as the average values after deduction of the exchange of service messages. Consider the average packet size L = 1000 bytes (8000 bits). As is known, the average service time is still considered using formula (6):
where:
-
L – the average packet size (bit),
-
\(b_i\) – data rate (bit/ms).
5 Numerical Results Based on Mathematical Models
Using the formulas (1), (4), (5) and the parameters presented in Table 1, we get the voice delivery time with a change in the number of UAVs. The variation of the number of UAVs is carried out until the voice transmission time exceeds 100 ms, this is represented as an unacceptable quality of service for the voice transmission.
The results of calculating the voice transmission time in this case are presented in Table 2.
As well as with the change in the load factor according to formulas (1), (2), (4), (5) and the parameters presented in Table 1, we get the voice transmission time between subscribers and the number of UAVs that can provide communication between them. The results in this case are presented in Tables 3 and 4.
6 Analysis of Results
Table 2 shows the voice transmission time between subscribers with the change of the number of UAVs for the two models when the load factor of the whole system is 0.5. Accordingly, the number of UAVs necessary to cover the disaster area, is found. When considering the two models M/M/1 and G/G/1, there is a big difference in the maximum number of UAVs necessary to provide the voice transmission delay less than 100 ms. Using M/M/1 model, we got the number of UAVs (50 pcs), which is twice number of UAVs (24 pcs) when using the G/G/1 model. Therefore, the service area with the increase in the number of UAVs also expands. With the same number of UAVs, the voice transmission delay using the M/M/1 model is less than using the G/G/1 model. Tables 3 and 4 show the maximum required number of UAVs with increasing system load factor. From these results we can see that there is a difference in the delay when using IEEE 802.11n and IEEE 802.11ac technologies, which provide the communication between subscribers and UAVs. The number of UAVs decreases with increasing system load factor. Consequently, the service area for two subscribers becomes narrower or the distance between them is extremely short. According to the data in the tables, we can see that when using the M/M/1 model, 25 UAVs are required with the load factor equals to 0.8 while when using the G/G/1 model requires 24 UAVs with the load factor equals to 0.5.
7 Conclusion
The article considered the architecture of a network model for connecting mobile subscribers in the disaster area when telecommunications infrastructure are destructed. The network model is organized on the basis of a flying network, in which IEEE 802.11p technology is used for UAVs communication, and IEEE 802.11n/ac technology for communication between UAVs and mobile phones. The article analyzed the models of multiphase queuing system type M/M/1 and G/G/1, which are considered for UAVs communication, as well as for communication between mobile phones and UAVs. For each model, we calculated the voice transmission delay and the number of UAVs, at which permissible quality of service of calls in the disaster zone can be guaranteed. The results show that it is possible to establish the number of UAVs needed to cover the disaster zone in various cases. This can be of considerable assistance in the search and rescue of victims of a natural disaster.
References
De Freitas, E.P., et al.: UAV relay network to support WSN connectivity. In: Proceedings of the International Congress on Ultra Modern Telecommunications and Control Systems, Moscow, pp. 309–314. IEEE (2010)
Orfanus, D., Eliassen, F., de Freitas, E.P.: Self-organizing relay network supporting remotely deployed sensor nodes in military operations. In: 6th International Congress on Ultra-Modern Telecommunications and Control Systems and Workshops (ICUMT), St. Petersburg, pp. 326–333. IEEE (2014)
Vasiliev, D.S., Meitis, D.S., Abilov, A.: Simulation-based comparison of AODV, OLSR and HWMP protocols for flying ad hoc networks. In: Balandin, S., Andreev, S., Koucheryavy, Y. (eds.) NEW2AN 2014. LNCS, vol. 8638, pp. 245–252. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10353-2_21
Bekmezci, I., Sahingoz, O.K., Temel, S.: Flying ad-hoc networks: a survey. Ad Hoc Netw. 11, 1254–1270 (2013)
Koucheryavy, A., Vladyko, A., Kirichek, R.: State of the art and research challenges for public flying ubiquitous sensor networks. In: Balandin, S., Andreev, S., Koucheryavy, Y. (eds.) ruSMART 2015. LNCS, vol. 9247, pp. 299–308. Springer, Cham (2015). https://doi.org/10.1007/978-3-319-23126-6_27
Kirichek, R., Paramonov, A., Koucheryavy, A.: Flying ubiquitous sensor networks as a queuing system. In: Proceedings of the 17th ICACT, pp. 127–132 (2015)
Kirichek, R., Paramonov, A., Koucheryavy, A.: Swarm of public unmanned aerial vehicles as a queuing network. In: Vishnevsky, V., Kozyrev, D. (eds.) DCCN 2015. CCIS, vol. 601, pp. 111–120. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-30843-2_12
Kirichek, R., Vladyko, A., Paramonov, A., Koucheryavy, A.: Software-defined architecture for flying ubiquitous sensor networking. In: International Conference on Advanced Communication Technology, ICACT, pp. 158–162 (2017)
Shilin, P., Kirichek, R., Paramonov, A., Koucheryavy, A.: Connectivity of VANET segments using UAVs. In: Galinina, O., Balandin, S., Koucheryavy, Y. (eds.) NEW2AN/ruSMART -2016. LNCS, vol. 9870, pp. 492–500. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-46301-8_41
Kirichek, R., Kulik, V.: Long-range data transmission on flying ubiquitous sensor networks (FUSN) by using LPWAN protocols. In: Vishnevskiy, V.M., Samouylov, K.E., Kozyrev, D.V. (eds.) DCCN 2016. CCIS, vol. 678, pp. 442–453. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-51917-3_39
Schalk, L.M.: Communication links for unmanned aircraft systems in very low level airspace. In: Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, p. 6B2-1. IEEE (2017)
Li, J., Zhou, Y., Lamont, L.: Communication architectures and protocols for networking unmanned aerial vehicles. In: Globecom Workshops (GC Wkshps), Atlanta, pp. 1415–1420. IEEE (2013)
Andre, T., et al.: Application-driven design of aerial communication networks. IEEE Commun. Mag. 52(5), 129–137 (2014)
Frew, E.W., Brown, T.X.: Airborne communication networks for small unmanned aircraft systems. Proc. IEEE 96(12), 2008–2027 (2008)
Morgenthaler, S., Braun, T., Zhao, Z., Staub, T., Anwander, M.: UAVNet: a mobile wireless mesh network using unmanned aerial vehicles. In: Globecom Workshops (GC Wkshps), Anaheim, pp. 1603–1608. IEEE (2012)
Van der Bergh, B., Chiumento, A., Pollin, S.: LTE in the sky: trading off propagation benefits with interference costs for aerial nodes. IEEE Commun. Mag. 54(5), 44–50 (2016)
Da Conceicao, A.F., Li, J., Florencio, D.A., Kon, F.: Is IEEE 802.11 ready for VoIP? In: IEEE 8th Workshop on Multimedia Signal Processing, pp. 108–113 (2006)
Chagh, Y., Guennoun, Z., Jouihri, Y.: Voice service in 5G network: towards an edge-computing enhancement of voice over Wi-Fi. In: 39th International Conference on Telecommunications and Signal Processing (TSP), pp. 116–120 (2016)
Ngongang, S.F.M., Tadayon, N., Kaddoum, G.: Voice over Wi-Fi: feasibility analysis. In: Advances in Wireless and Optical Communications (RTUWO), pp. 133–138 (2016)
IEEE Standards Association. Part 11: Wireless LAN medium access control (MAC) and physical layer (PHY) specifications. IEEE std, 802 (2012)
Kim, S.-Y., Ro, J.-H., Song, H.-K.: Channel estimation scheme for the enhanced reliability in the flying ad-hoc network. Int. J. Eng. Res. Appl. 7(4), 63–66 (2017)
ITU-T Recommendation G.114. One-way transmission time (2003)
Kleinrock, L.: Queueing Systems. Volume 2: Computer Applications, vol. 66. Wiley, New York (1976)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Dinh, T.D., Pham, V.D., Kirichek, R., Koucheryavy, A. (2018). Flying Network for Emergencies. In: Vishnevskiy, V., Kozyrev, D. (eds) Distributed Computer and Communication Networks. DCCN 2018. Communications in Computer and Information Science, vol 919. Springer, Cham. https://doi.org/10.1007/978-3-319-99447-5_6
Download citation
DOI: https://doi.org/10.1007/978-3-319-99447-5_6
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-99446-8
Online ISBN: 978-3-319-99447-5
eBook Packages: Computer ScienceComputer Science (R0)