
Abstract
On projects where there is limited or only high-level information relating to source, path and receiver components, the uncertainty associated with ground-borne noise and vibration predictions can be large and prediction uncertainties of up to 10 dB(A) have been reported and sometimes applied as a safety factor (engineering margin) on underground railway projects. However, this simplistic and somewhat ad hoc approach is not well founded quantitatively. Furthermore, during the detailed design stage of projects, such large safety factors can be very costly in terms of the required mitigation measures. The uncertainty associated with some modelling input parameters can be quantified and minimised via repeated measurements, however many other parameters and the uncertainty associated with predictions can only be established via published data or engineering judgement. On a recent underground railway tunnel project, a quantitative approach was used with the aim of improving estimates of prediction uncertainties and to better advise the design team of the level of design risk associated with the predictions. Field measurements were also utilised to reduce the uncertainty associated with the ground-borne noise and vibration predictions. Prediction uncertainties were determined on the basis of the methodologies described in the ‘Guide to the expression of uncertainty in measurement’ (GUM) and by establishing an uncertainty budget for each part of the ground-borne noise and prediction process (source, path and receiver). For each modelling input parameter (or source of uncertainty), an estimate of the likely range (minimum and maximum) of values was made on the basis of measurement results, published data and engineering judgement. This paper presents the uncertainty budget calculations where for each parameter, an estimate of the standard uncertainty (uncertainty contribution) has been made on the basis of the half range, the probability distribution and associated distribution divisor. This paper focuses on the results and outcomes at a representative receiver above the railway tunnel which was selected to establish and illustrate the uncertainties in the modelling predictions. The combined standard uncertainty at this location was calculated at 2.5 dB(A) for the source parameters, 2.0 dB(A) for the path parameters and 2.2 dB(A) for the receiver parameters. The combined standard uncertainty for the whole prediction path was calculated to be 3.9 dB(A). A Monte Carlo simulation with 100,000 iterations was also undertaken to provide an independent calculation of the combined standard uncertainty.
In summary, the prediction uncertainty analysis found:
-
the predicted ground-borne noise levels are expected to lie within ±3.9 dB(A) [±1σ] of the mean with 68% confidence;
-
by adding an engineering margin of 1σ or 3.9 dB(A) to the predicted noise level, the probability of the actual (or true) noise level being less than the predicted noise level is 84%, or conversely, the risk that the actual noise level will be higher than the predicted noise level is 16%; and
-
for a 90 and 95% confidence that the actual (or true) noise level will be less than the predicted noise level, the following engineering margins should respectively be added to the modelling results: 5.0 and 6.4 dB(A).
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

1 Introduction
1.1 Railway Ground-Borne Noise and Vibration
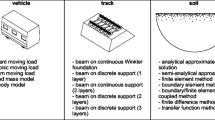
Ground-borne noise and vibration (GBNV) modelling has been undertaken for a recent railway tunnel project, based on the guidance contained in International Standard ISO14837-1:2005 [1]. The standard provides guidance in relation to the key factors to be considered when predicting GBNV for rail operations and guidance on modelling methods. Three key factors are identified in the propagation of GBNV, and comprise:
-
1.
source vibration levels occurring at the wheel-rail interface and supporting track form,
-
2.
vibration transferred between the tunnel and the ground surface via the surrounding ground, and
-
3.
vibration levels occurring within the building and associated ground-borne noise levels.
For underground railways, vibration is transmitted through the track structure, through the ground mass and into building structures. This vibration has the potential to be perceptible to building occupants as tactile vibration but is usually manifested as ground-borne noise.
The extent of vibration is influenced by several physical aspects such as: mass of train (axle load and unsprung mass); train speed and length; condition of rail surface (e.g. alignment, roughness and defects such as corrugations etc.); condition of wheels (e.g. roughness, flats or other wheel defects etc.); type of track structure and form (e.g. stiffness or softness of rail track bed and fasteners, tunnel type, etc.); ground type between tunnel and receiver buildings; distance between tunnel and receivers, tunnel depth and construction type of receiver buildings.
1.2 Modelling Parameters and Uncertainties
The standard [1] identifies three primary methods for predicting ground-borne noise and vibration. These include parametric models (algebraic and numerical solutions), empirical models of various types, and semi-empirical models, which involve a combination of parametric and empirical components.
The modelling for this project was based on a combination of measurement data obtained from an underground railway line with similar ground conditions, with interpolation and extrapolation of these results for situations where different source, ground or receiver conditions occurred. Where corrections were required, these were calculated using a variety of parametric and empirical methods. The GBNV prediction algorithms had been previously validated via field measurements on another underground rail scheme.
The calculated GBNV along an underground rail corridor are based on numerous parameters and assumptions considered during the design phase. Some parameters can be easily quantified with a good degree of certainty, while other parameters can only be estimated based on very little available data and information, causing these to have lower certainty.
For the subject rail tunnel, the parameters quantified and used in the predictions are presented in Table 1. An estimate of the prediction uncertainties was undertaken in order to quantify and advise the design team of the level and range of design risks that are associated with the rail GBNV predictions.
It is important to recognise that all scientific predictions (and measurements) have some degree of error. Therefore, when predicting the potential impacts from GBNV from underground rail operations, there are errors or uncertainties that will occur with predictions. Prediction uncertainties were determined on the basis of the methodologies described in the GUM [2].
For each modelling input parameter (or source of uncertainty), an estimate of the likely range (minimum and maximum) of values was made on the basis of field measurement results, published data and engineering judgement. An uncertainty budget was established for each part of the ground-borne noise and prediction process (refer Table 1), based on guidance in Ref. [3].
2 Uncertainty, Confidence Intervals and Coverage Factors
This paper examines the uncertainty associated with undertaking GBNV predictions. To illustrate the methodology and procedure followed, a representative receiver above the railway tunnel was selected to establish uncertainties in the modelling predictions.
The GUM [2, 3] provides detailed guidance on how to calculate the Uxx, the differences between Type A (statistical) and Type B (any other non-statistical means) evaluations, distribution types (e.g. normal, triangular, rectangular, etc.), ranges, etc., and how to evaluate the combined uncertainty.
A Type A uncertainty analysis is typically based on determining the standard deviation (standard uncertainty) of measurement results. A Type B uncertainty analysis involves estimating the uncertainty of the input parameter on the basis of published data, calculations, engineering judgement or common sense. Type A and Type B analyses are considered in this example.
For some Type B evaluations, it is only possible to estimate the upper and lower limits of uncertainty. It may then be assumed that either the value is equally likely to fall anywhere in between, (i.e. a rectangular or uniform distribution) or that there is a greater chance that the value will fall close to the mean of the possible data range (i.e. a normal or triangular distribution). Other distribution types are also possible.
2.1 Uncertainty Budgets
A summary of the uncertainty budget calculations is provided in Table 2. For each GBNV modelling input parameter, an estimate of the standard uncertainty (uncertainty contribution) has been made.
For some input parameters (e.g. speed variations and unsprung mass), the minimum and maximum assumptions which are utilised to establish the range in possible values must be converted into decibels before the uncertainties can be combined. Thus a 5% change in the accuracy of train speed measurement was determined to be equivalent to a 0.4 dB change in GBNV levels.
Individual standard uncertainties can be combined validly by ‘summation in quadrature’ (also known as ‘root sum of the squares’), which is called the combined standard uncertainty and denoted by u c :
The approach of summing the uncertainties works well where calculations of prediction results involve the summation of a series of values. For example, when calculating GBNV levels, calculations begin with source vibration 1/3 octave band spectra to which corrections are added or subtracted to in order to derive predicted levels at receiver locations. In this and similar cases, parameter uncertainties are treated equally and are unweighted. For cases where calculations involve the multiplication, division, power or logarithm of values (e.g. when adding vibration or noise components to arrive at total levels), relative or fractional uncertainties must be used in order to weight the effect of parameter uncertainties on the combined standard uncertainty (refer Ref. [2]).
2.2 Confidence Intervals and Coverage Factors
Uncertainty is the measure of dispersion or variance that may be expected with a claimed performance value, often represented by the term Uxx. The subscript ‘xx’ means a xx% confidence interval. It represents the estimated range in which the true value lies for xx out of 100 repeated events, e.g. a U95 of 5 dB indicates that the true value is expected to be within ±5 dB of the estimates provided for 95% of all observations.
Once the combined standard uncertainty is determined, it may be required to re-scale the result. The combined standard uncertainty may be thought of as equivalent to ‘one standard deviation’ (1σ), but it may be preferred to have an overall uncertainty stated at another level of confidence. This re-scaling can be done using a coverage factor, k. Multiplying the combined standard uncertainty, u c by a coverage factor gives a result which is called the expanded uncertainty, usually shown by the symbol U, i.e. U = ku c . A coverage factor k = 2 results in a confidence level of 95%. The most common level of preferred confidence for acoustic predictions often lies between 68% (±1σ) and 95% (±2σ), which can be referred to as having a coverage factor of 1 and 2, respectively.
3 Uncertainty Calculations
3.1 Uncertainty Predictions Based on GUM
For each parameter used in predicting project GBNV levels, an estimate of the standard uncertainty (uncertainty contribution) has been made on the basis of the methodologies described in the GUM [2]. Table 2 presents a summary of the uncertainty calculations.
The combined standard uncertainty is calculated to be 2.5 dB(A) for the source parameters, 2.0 dB(A) for the path parameters and 2.2 dB(A) for the receiver parameters. The combined standard uncertainty for the entire prediction path is calculated to be 3.9 dB(A). This indicates that the predicted ground-borne noise levels are expected to lie within ±3.9 dB(A) [±1σ] of the predicted levels with 68% confidence and within ±7.8 dB(A) [±2 σ] of the predicted levels with 95% confidence.
For compliance with specifications or design noise targets, predictions with confidence intervals of 84% (+1σ) or 95% (+1.64σ), are commonly found in standard Normal Distribution tables, for example Ref. [8]. That is, there is:
-
84% confidence that the true level will be below the predicted level plus 1σ [i.e. plus 1 × 3.9 = 3.8 dB(A)]
-
90% confidence that the true level will be below the predicted level plus 1.28σ [i.e. plus 1.28 × 3.9 = 5.0 dB(A)]
-
95% confidence that the true level will be below the predicted level plus 1.64σ [i.e. plus 1.64 × 3.9 = 6.4 dB(A)].
3.2 Uncertainty Predictions Based on Monte-Carlo Simulation
In order to validate the combined standard uncertainty of the predictions presented in Table 2, a Monte Carlo simulation was performed.
For each modelling input parameter, a pseudo-random number was generated within a spreadsheet and the corresponding prediction error was determined on the basis of the half range or standard deviation, and associated probability distribution function (normal, rectangular or triangular). For each iteration, the total prediction error was calculated by arithmetically summing the prediction errors associated with each modelling input parameter. This process was repeated for 100,000 iterations.
The results of this analysis yielded a standard deviation (combined standard uncertainty) of 3.9 dB(A) in the prediction errors, consistent with the GUM analysis method in Table 2.
4 Methods Used to Reduce Modelling Uncertainty
With reference to the example uncertainty budget calculations in Table 2, the overall uncertainty can be reduced most effectively by focusing on the modelling input parameters with the largest uncertainty. For this project, the GBNV input parameters found to have the largest uncertainty were: vibration source levels; rail roughness levels; ground conditions/attenuation between source and receivers; building coupling losses/amplifications; the vibration spectrum shape; and the algorithm conversion of vibration to noise. Field vibration and noise measurements from the subject project and other similar projects were reviewed to assist with reducing the uncertainty of some of these key parameters:
-
Vibration Source Levels: The variation in source vibration levels at otherwise identical measurement sites with similar track forms were established on the basis of measurement data from an existing railway tunnel. One-third octave band vibration measurements of multiple train passbys were undertaken at multiple locations with known track forms, rolling stock and train speeds. Corrections to the measured vibration levels were made to account for minor differences in the proposed track forms, rolling stock and speeds. The uncertainty associated with these corrections form part of the uncertainty predictions.
-
Rail Roughness Levels: The typical variation in rail roughness was investigated via a review of rail roughness measurements undertaken on a comparable railway scheme. Within the wavelength range critical to ground-borne noise (greater than 100 mm for train operations less than 100 km/h), the measured rail roughness levels were typically lower than the rail roughness limit spectrum in ISO 3381-2005 [4] and ISO 3095-2005 [9] at all locations. For modelling, it was assumed that the rail roughness levels will be maintained to these standards or better throughout the life of the rail system and that this would be achieved via the periodic measurement of rail roughness and acoustic rail grinding.
-
Ground conditions/attenuation: Between the tunnel and ground surface, vibration attenuation occurs due to two primary factors: geometric spreading (via body waves) and excess attenuation (due to material damping). For train vibration (where the length of the train is large compared with the propagation distance), vibration levels attenuate in a cylindrical pattern at a rate of 3 dB per doubling in distance [5,6,7]. Additional losses due to material damping are frequency dependent, with greater losses occurring at higher frequencies (smaller wavelengths). Excess attenuation values were determined from transfer mobility measurements and vibration measurements above the project tunnel during tunneling construction works.
Excess attenuation values at a number of locations across all data sets were found to be generally comparable and were adopted for modelling purposes.
-
Building Coupling Loss/Amplification and Conversion Factors from Vibration to Noise: Attended noise and vibration measurements were conducted at multiple sensitive receiver locations in close proximity to the project tunnel. The purpose of the measurements was to quantify: vibration propagation between tunnels and ground surface; coupling loss and amplification (difference in ground-borne vibration levels outside building and floor vibration levels inside building), and conversion of floor vibration levels to audible noise. A statistical approach, based on the measurement results at multiple locations was utilised to calculate the standard deviation of the results.
The uncertainty budget calculations in Table 2 include the benefits of the above field test inputs.
5 Conclusions and Recommendations
On projects where there is limited or only high-level information relating to the source, path and receiver components, the uncertainty associated with GBNV predictions can be large. On the basis of some references [10, 11], prediction uncertainties of up to 10 dB(A) have been reported and sometimes applied as a safety factor (engineering margin) on underground railway projects. During the detailed design stage of projects, large safety factors can be very costly in terms of the required mitigation measures.
Field measurement data was utilised on this project to reduce the uncertainty associated with key modelling input parameters (source, propagation path and receiver). For other input parameters, the uncertainty was established via published data and engineering judgement. The overall prediction uncertainty was calculated on the basis of guidance in the GUM and independently validated via Monte Carlo simulation.
Assessment of the modelling uncertainty on the basis of a quantitative approach based on GUM provides the additional benefit of quantifying the probability (confidence level) of the prediction uncertainty. Rather than simply stating that the prediction uncertainty is accurate to ±5 dB or ±10 dB, the prediction uncertainty based on GUM for this project can be stated as follows:
-
the predicted ground-borne noise levels are expected to lie within ±3.9 dB(A) [±1σ] of the predicted levels with 68% confidence, or within ±7.8 dB(A) [±2σ] of the predicted levels with 95% confidence;
-
by adding an engineering margin of one standard deviation [3.9 dB(A)] to the predicted noise level, the probability of the actual (or true) noise level being less than the predicted noise level is 84%, or conversely, the risk that the actual noise level will be higher than the predicted noise level is 16%; and
-
for a 90 and 95% confidence that the actual (or true) noise level will be less than the predicted noise level, the following engineering margins should respectively be added to the modelling results 5.0 and 6.4 dB(A).
In summary, by undertaking field measurements and establishing uncertainties for all input modelling parameters, the overall confidence in the GBNV predictions was quantified using GUM, and found to be significantly better than originally estimated. This in turn assisted in reducing engineering design margins with subsequent project mitigation cost reduction benefits.
References
International Standards, ISO 14837-1:2005—Mechanical vibration—Ground-borne noise and vibration arising from rail systems (2005)
ISO/IEC Guide 98-3, Uncertainty of measurement—Part 3: Guide to the expression of uncertainty in measurement, ISBN 92-67-10188-9, 1st Edition 1993, corrected and reprinted 1995 (GUM:1995)
Craven, N.J., Kerry, G.: School of Computing, Science & Engineering, The University of Salford. A Good Practice Guide on the Sources and Magnitude of Uncertainty Arising in the Practical Measurement of Environmental Noise Edition 1a—May 2007
International Standards, ISO 3381-2005 Railway applications—Acoustics—Measurement of noise inside railbound vehicles, ISO (2005)
Hassan, O.A.B.: Train-Induced Ground-borne Vibration and Noise is Buildings. Multi-Science Publishing Co., Ltd., Essex (2006)
Nelson, P.: Chapter 16 Low Frequency Noise and Vibration from Trains (Remington, Kurzweil and Towers), in Transportation Noise Reference Book, Butterworths (1987)
Transit Noise and Vibration Impact Assessment, United States Federal Transit Association (2006)
Walpole, R., Myers, H.: Probability and Statistics for Engineers and Scientists (5th ed.)—Appendix A.3, Macmillan Publishing Company (1993)
International Standards, ISO 3095:2005 Railway applications—Measurement of noise emitted by railbound vehicles (2005)
Hunt, H., Hussain, M.: Accuracy, and the prediction of ground vibration from underground railways, 5th Australasian Congress on Applied Mechanics, Australia (2007)
KTE Rail Tunnel Project–Hong Kong—http://www.epd.gov.hk/eia/register/report/eiareport/eia_1842010/EIA/html/8%20-%20GB%20Noise.htm. Available online—accessed 4 July 2016
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Weber, C., Karantonis, P. (2018). Rail Ground-Borne Noise and Vibration Prediction Uncertainties. In: Anderson, D., et al. Noise and Vibration Mitigation for Rail Transportation Systems. Notes on Numerical Fluid Mechanics and Multidisciplinary Design, vol 139. Springer, Cham. https://doi.org/10.1007/978-3-319-73411-8_22
Download citation
DOI: https://doi.org/10.1007/978-3-319-73411-8_22
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-73410-1
Online ISBN: 978-3-319-73411-8
eBook Packages: EngineeringEngineering (R0)