
Abstract
For nature conservation, regular provision of consistent, timely and useable classifications of land covers and change is highly beneficial but is rarely achieved. This chapter outlines the concepts behind the Earth Observation Data for Ecosystem Monitoring (EODESM) system, which facilitates the description and classification of any site worldwide according to the Food and Agriculture Organisations (FAO) Land Cover Classification System (LCCS; Version 2) and with reference to environmental variables retrieved from earth observation. Changes in land cover, as well as causes and consequences, are described through the accumulation of evidence and the system recognises these to be numerous, highly variable and specific to different elements of the landscapes. Hence, they can be captured by considering information provided by a range of sensors operating in different modes and over different temporal frequencies and scales. The EODESM system is available at no cost and its ease of use makes it well suited to supporting nature conservation.
Access provided by CONRICYT-eBooks. Download chapter PDF
Similar content being viewed by others


Keywords
Introduction
Imagine you are driving through a landscape and you are able to select any area of ground and go back in time, seeing all its transitions and freezing the frame as and when you liked. Was it covered in snow last winter, and was this deep or just a light covering; or when did the spring leaves start to appear and then fall? Or, you want to know whether the road you are now driving along is flooded or clear given there had been intense rainfall in the mountains the night before? What kind of landscape might this be in 50 years time and what might determine how it got there?
Within decades or less, the ability to routinely look back in time, assess current situations and perhaps predict the future will most likely be a reality, particularly given progress towards high resolution digital and multi-spectral temporal images (the equivalent of videos) from space. In the next few years, people will be able to look back in time to see how whole landscapes have changed over their lifetimes. Linked with equivalent advances in ground-based observations, this will provide an unprecedented view of our planet and the opportunity to tell stories of what we have done and how things might change over our lifetimes.
The ability to observe the events and processes that have shaped our landscape over the past 32 years (at least since 1985) has, to some extent, already been achieved through time-lapses of Landsat sensor imagery provided by the Google Earth Engine. Within this system, we can observe erupting volcanoes, surging glaciers, large floods, shifting coastlines, clearing of forests and expanding cities. We have a record of man’s impact on the planet in the recent past and some of it makes for uneasy viewing.
The public release of the Landsat archive allowed us to have this unique perspective and many scientists have subsequently provided detailed temporal classifications of land cover. These have included forest losses and gains (Hansen et al. 2013), tree canopy density (Hansen et al. 2013; Sexton et al. 2013), hydro-periods (Pekel et al. 2016), open water (Feng et al. 2016), bare ground (Hansen et al. 2013), impervious surfaces (Langanke et al. 2013) and ecosystem extent and dynamics (e.g., mangroves; Giri et al. 2011). Using coarser spatial resolution (typically 0.25–1 km) sensors, such as the NOAA AVHRR and MODIS, an extensive historical archive of other features of the Earth’s surface, including snow cover (Hall and Riggs 2016) and land and sea surface temperature (Merchant et al. 2008), has been generated over past decades, giving us a unique insight into recent global change.
The amounts of data that have currently been acquired and will be provided in the future are vast. However, our ability to handle large amounts of, what is often termed big data, is being addressed through cloud and other high performance computing, with these providing substantive storage and processing capability. Furthermore, image data can be downloaded and distributed to users rapidly and, in some cases, in real or near real time (as in the case of the Planet Lab’s CubeSat data). This new capability provides opportunities to understand the changes that have happened, both over past decades and more recently, and to monitor and plan into the future. If used effectively, these systems can be used to prevent or reverse some of the damage that is being or has been inflicted on the planet and to conserve what is remaining.
In this chapter, we describe the Earth Observation Data for Ecosystem Monitoring (EODESM) system, which uses retrieved environmental variables and specified classifications from earth observation data to characterise and map land covers. Changes are identified by considering evidence obtained from earth observation data and from other sources. The system provides insight into the causes and consequence of change and redistribution of physical elements (e.g., water, sediments and carbon). The system can also be used to recommend where and how to restore or protect ecosystems. The approach we describe is easy to understand, simple to operate and revise, and provides a wealth of information that can be used for a wide range of purposes, including for the conservation of nature.
Recognizing User Needs
Individuals, groups or organisations charged with managing, conserving, protecting and/or restoring environments desire both historical, recent and, often, real time spatial information on landscapes. Whilst the satellite and aircraft images themselves provide a pictorial (and also digital) overview, the information extracted or derived from these is often far more useful, particularly if this is: consistent over time and within and between areas of interest; includes environmental variables (e.g., biomass, soil moisture, salinity and water flows) or thematic classifications of land cover, and changes in these; considers historical contexts, present situations and future prospects; is provided at scales that are appropriate to the questions being asked; and accurately reflects the state and dynamics of landscapes over varying time frames. Accessibility of information is also critical, whether provided as products (e.g., tree cover density) or as software or processes that allow the users to extract the required information by themselves based on their own requirements or those of others. These requirements have been considered during the design and development phases of the EODESM system.
The EODESM System
The EODESM System was developed through the EU Horizon 2020 Project, ECOPOTENTIAL and was designed to provide consistent classifications of land covers and change at multiple scales. The EODESM System was a later iteration of the Earth Observation for Dynamic Habitat Monitoring (EODHaM; Lucas et al. 2014), which was conceptualised through the FP7 Biodiversity Multi-SOurce Monitoring System (BIOSOS) project.
Both the EODHaM and EODESM system use the Food and Agricultural Organisation’s (FAO’s) Land Cover Classification System (LCCS; Version 2; Di Gregorio 2005) taxonomy to classify land covers within protected areas and their immediate surrounds. However, for classification, the earlier EODHaM system applied a rule-based classification to very high resolution (VHR) Worldview-2 (acquired in the pre- and peak-vegetation flush periods) and (if available) airborne LIDAR to extract the components of the LCCS classes. These included life form (i.e. shrubs, trees, grasses, forbs, lichens or mosses), leaf type (broadleaved, needle-leaved or aphyllous), phenology (e.g., evergreen or deciduous), water movement (standing or flowing) and sediment loads in water (turbid or clear). These extracted components were then combined to generate a string of codes (e.g., A3.A10.B2.C1.D1.E1), which were translated subsequently and automatically to descriptive text (in this case, trees of closed canopy (>70–60%) that are tall (14–30 m), continuous, broadleaved and evergreen). The classifications of each of the layers within the EODHaM system were conducted by defining and adjusting thresholds of spectral bands or indices, including the Normalised Difference Vegetation Index (NDVI), Plant Senescence Reflectance Index (PSRI), Water Band Index (WBI) and (where available) Canopy Height Models (CHMs) derived from LIDAR. Whilst providing highly detailed classifications, the main limitation was the consistency in the use of spectrally-based rules as these had to be adjusted regularly to allow for differences in atmospheric, illumination and environmental (e.g. phenological) conditions prevalent at the time of the Worldview-2 overpasses. For this reason, a new concept was developed for the EODESM system.
Our Unchanging World
Whilst there are significant changes in land cover arising from both natural and human-induced events and processes, the basic building blocks of landscapes (e.g., foliage, wood, rocks, water in various states) generally do not change and neither do the quantitative measures that are used to describe these (e.g. biomass, canopy cover, amounts of dead or senescent material, species type, temperature, water flows). The measures that satellite sensors record are largely consistent, with these including spectral reflectance (%), radar backscatter (e.g., γ°), surface heights and dimensions (m) and temperature (°C). Therefore, regardless of what happens in the future, descriptors of the building blocks of our environment will largely be the same, as will the data and measures obtained from satellite, airborne and ground-based systems. The challenge is to define the best algorithms and combinations of data to describe these building blocks in a way that is consistent, reliable over time, accurate and understandable. In effect, what is needed is a system with longevity that will allow classifications of landscapes in, for example, 2100 to be compared to those of the 1970s, when the Landsat sensors first acquired spectral data, and even before then.
The FAO LCCS-2 is a taxonomy that is fundamentally well suited for providing consistent classifications of land covers in the long term as many of its inputs are derived from well-defined and established environmental descriptors and variables. For example, for natural and semi-natural vegetation, key descriptors are life form, canopy cover, the vertical and horizontal distribution of plant material, leaf type and phenology, all of which can be derived from earth observation data acquired in different or similar modes. For this reason, rather than focusing on providing the best classification algorithm, the EODESM system places emphasis on retrieving continuous environmental variables as well as generating thematic classifications (e.g., of life form or leaf type), which are combined subsequently to form the LCCS-2 classes. For purposes of nature conservation, an additional and essential descriptor is plant species or genus type (that is not considered in the LCCS classification but is derived independently), which can be mapped remotely although is often restricted to those that are spectrally distinct. An overview of the main layers that are required as direct input to the LCCS-2 scheme are outlined in Table 1, with these relating to essential variables associated with the broad categories of agriculture, biodiversity and ecosystems, human settlements, bare surfaces and water/renewable energy/climate.
Knowledge of the state and dynamics of environments requires additional information on variables that are not relevant or appropriate for land cover classification (Table 2). These relate to the primary uses and components of the landscape, namely agriculture and forestry (e.g., crop and timber yields), vegetation (e.g., biomass, leaf area index), human settlements (populations), bare surfaces (e.g., soil moisture content) and water (e.g., pH, nutrient content, snow grain size or moisture content). As such, information on the magnitudes and changes in these variables can be included as attributes of the land cover classification and inform on current states and past changes. Furthermore, many of these variables, as well as those used as direct input to the LCCS-2 classification, can be modelled, which gives the capacity to generate predicted land cover maps (and associated variables).
Whilst the concept of using environmental variables as the basis for classification and description of land covers is logical, an issue is the practicality of obtaining these. It is unrealistic to expect nature conservation practitioners to generate this information themselves in order to produce land cover maps and so these need to be made available or capacity provided to generate these. Fortunately, because of the past and current efforts of a large number of engineers and scientists, environmental variables are now being routinely retrieved from satellite and airborne data and made freely available. Notable examples include those generated at the global level from Landsat sensor 30 m data, including tree canopy cover (2000 and 2010; Hansen et al. 2013; Sexton et al. (2013)), bare ground proportions (2010; Hansen et al. 2013), hydro-period (1987–2015; Pekel et al. 2016), and MODIS 500 m derived data (e.g. 8-day snow cover from 2000; Hall and Riggs 2016). For Europe, 20 m resolution maps of tree cover density (2012), forest leaf type (2012), permanent water (2006–2012) and impervious surfaces (2011–2012) have been generated through the Copernicus project from optical satellite sensor data from 2001 and 2011 (Langanke et al. 2013). At local levels, more detailed retrieval has occurred using VHR resolution and LIDAR as well as spaceborne optical and radar sensors, including ocean wind speeds (Rana et al. 2016), soil moisture (Pasolli et al. 2015) and snow moisture content (Nagler and Rott 2000). In each case, specialist algorithms for retrieving environmental variables have been developed through years or even decades of research and the resulting datasets are often well suited to support the classification and attribution of land cover classes and change according to the LCCS-2 taxonomy. The algorithms used for the generation of environmental variables are also being made available with associated software and these can be used for self-generation of the required data layers, though calibration and/or validation is essential in some cases. The outputs from the EODESM system can also be used to describe additional variables (Table 3), with these relating to, for example, disturbance regimes.
Classification of Land Covers
The FAO LCCS-2 taxonomy used in the EODESM system (Fig. 1) is hierarchical and allows for the progressive classification of a comprehensive range of land covers from earth observation data with these corresponding to those observed at ground level (Kosmidou et al. 2013; Tomaselli et al. 2013). The LCCS system has been used as the basis for EO-based classifications in many studies but the typical approach has been to establish training areas for the ‘end classes’ of the taxonomy (such as broadleaved evergreen forests; see Yang et al. (2017) for a review of the LCCS and other commonly used taxonomies). The EODESM takes a different view in that it follows the sequences of classifications through the hierarchy using derived products from EO data, with these including environmental variables but also other ancillary spatial information such as cadastral and urban maps, process models (e.g., hydrological) and knowledge. The EODESM system accepts 30 primary inputs (e.g., relating to crop sequences, leaf type, cadastral information), with thematic layers requiring specific class codes (e.g., 1 for woody, 2 for herbaceous vegetation). Continuous layers (e.g., canopy cover and hydro-period) are automatically translated to pre-set thematic classes within the EODESM system. Once entered, the system automatically translates each input to LCCS component codes, which are then combined subsequently to generate a class description. Each class is then coloured according to a standardized scheme, as illustrated in Fig. 2. The advantage of the classification approach is that it is relevant and applicable to any site globally and can be applied independent of scale. The accuracies of both classification and change maps are assessed by referencing ground-based classifications, generated using the LCCS taxonomy (e.g., by exploiting mobile applications), or measures of uncertainty associated with retrieved environmental variables.

The FAO Land Cover Classification System (LCCS) Taxonomy

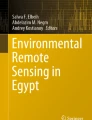
EODESM classification of land covers in the Camargue, southern France. Over 200 classes are represented with each associated with a detailed description according to the LCCS taxonomy. These broadly relate to water (blue), bare ground (brown), urban areas (grey), agriculture (light greens) and natural vegetation (darker greens)
Classification of Change
Within any landscape, changes are often the result of specific events that are either natural (e.g., fires, floods or storms) or the result of human activities (e.g., deforestation, mine excavation and cultivation). However, changes may be the result of longer-term processes, which again are also natural (e.g., vegetation growth, increased tidal inundation) or human induced (e.g., urban expansion, agricultural homogenisation). Climatic fluctuation may lead to changes in the frequency and intensity of events or alterations of long-term processes (e.g., mangrove extent because of progressive rises in sea level). Changes across a landscape also occur at different times, rates and frequencies and across different scales. For this reason, detection and classification from earth observation data has proved difficult as the acquisition dates and frequencies often do not match those associated with events and processes occurring at the ground level. Indeed, many studies focusing on change detection have typically dealt with only one type of change, with notable examples being deforestation monitoring and flood mapping, and little or no consideration is given to changes occurring within adjacent or proximal classes or at different times and rates. Furthermore, change is often detected on the basis of the differences in only one or a few remotely sensed variables, whether they are spectral reflectance or radar backscatter, indices or retrieved environmental variables.
Within the EODESM system, events and processes are detected when changes in the components of LCCS classes are observed. As an example, the annual period of inundation within a wetland may decline from 292 to 182 days, with this corresponding to a reduction in annual hydro-period from B1 (>9 months) to B8 (4–6 months). However, there may be additional evidence that supports the interpretation that such a change might be the result of drying of the landscape. This might include a change from flowing to standing water and/or turbid to clear water over a similar time frame, which are both thematic categories, but also in environmental variables such as an increase in salinity or algal amounts. By referencing this additional information, the probability of this change being attributed to long-term drying is increased. A further example is given in Table 4, which illustrates a change in both life form and canopy cover (Case A; associated with selective logging) and water state (snow to water) and flow rates (standing to flowing) (Case B; snow melt and increased river discharge). The accumulation of evidence to support the interpretation of the change event or process provides the user with information to facilitate a response and manage change effectively.
Whilst the LCCS-2 provides a means to describe land covers, few taxonomies are available for describing and documenting change. However, a review of transition events and processes conducted in support of the EODESM change detection modules identified 80 change categories, with these associated primarily with natural vegetation, agriculture, urban areas, water and bare ground (Table 5). In each case, possible transitions from one LCCS component class to another that are relevant for each of the 80 change categories have been documented, as have changes in retrieved environmental variables (including spectral indices). By considering these transitions, the EODESM system allows for automated detection of these changes based on evidence and can highlight those change events or processes that are adverse or beneficial, although opinion varies depending upon the nature of the environment being affected. For example, the establishment and growth of pine plantations may be beneficial in terms of biomass accumulation and carbon sequestration and storage but may have adverse impacts on the abundance and diversity of faunal species.
The automated detection and description of changes over varying periods of time and based on the accumulation of evidence often results in a large number of events and processes being identified over the period of a time-series. However, more targeted detection and description of change may be achieved by identifying breaks (e.g., using the BFAST algorithm; Verbesselt et al. 2010) or longer-term trends in the time series of, for example, Normalized Difference Vegetation Index (NDVI) data obtained from Landsat or Sentinel-2A/B data. Where an event is identified, imagery acquired just prior to and following the date of change can be accessed. A LCCS-2 class is then assigned and changes in the components of this class are reviewed. When used in combination with time-series of retrieved environmental variables, a better assessment of the change event can be provided. In the case of longer-term processes, the transitions in component classes over the change period (e.g., from trees to grasslands, to shrubs and back to trees in the case of regeneration following deforestation) can be used to track the nature of change in land cover. Changes in environmental variables can similarly be tracked. A particular advantage of this approach is that changes can be automatically highlighted depending upon their severity or benefit.
Causes and Consequences of Change
Often when we detect a change, there are clear drivers and consequences of this. For example, dieback of trees may occur because of a prolonged flooding event, with this evidenced primarily by a decrease in canopy cover. There are only a few likely causes of the flooding, with these including those that are natural (e.g., increased rainfall over an extended period or an intense rainfall event) or human-induced (the creation of a dam and reservoir). The immediate consequence of the flooding is the loss of foliage cover followed by full or partial mortality of all or some of the trees. Follow-on consequences that would be considered negative include the loss of terrestrial elements of biodiversity and carbon in vegetation, with these occurring over variable periods, whilst positive benefits might include an increase in aquatic biodiversity and long-term storage of carbon. The consequences may be relevant to the specific area of ground that is affected or experienced in areas that are proximal or even far removed. For all areas (or objects within a scene), the causes and consequences of change can often be pre-determined and hence mapped alongside the change. The causes and, more often, the consequences of change also relate to the movement of materials within a landscape. For example, a deforestation event within a catchment can result in the loss of carbon to the atmosphere, reduced uptake of carbon dioxide (CO2), the increased movement of water through the catchment and the transfer of sediment down slope, into water courses and ultimately to coastal regions. This movement of material can be modelled but can also often be observed within earth observation data or quantified within derived products (e.g., temporal vegetation biomass maps reflecting the accumulation of carbon).
The EODESM system has been designed to associate a change (described through the accumulation of evidence) with a number of causes and consequences (including movements of materials), which the most likely determined through consideration of evidence. As such, the system provides a range of users (e.g., scientists, nature conservation managers, politicians) with knowledge that can be used to make informed decisions on many aspects of the landscape relating to, for example, emergency response to adverse events, land management over varying time frames, the impacts of past and current policies and planning future landscapes.
Concluding Remarks
Using the vast archives of historical earth observation data and new concepts, such as those developed through the EODESM system, we can already place ourselves within a landscape, both currently and at specific points over the past 30 or so years, and describe the key elements relating to vegetation, water, bare areas and artificial and cultivated environments. This capacity has been enhanced considerably through the recent provision of near daily data from multiple sensors on board satellites including the RapidEye, Planetscope and Sentinel-1/2 and viewing platforms such as Google Earth, Google Earth Engine and Planet Lab's Explorer. Through knowledge of past landscapes, we can now better understand the reasons for their composition today and plan for future landscapes that balance human use of the land with the requirements of its flora and fauna, with this ultimately leading to societal and economical benefits. This capacity is set to increase significantly with advances in computing technology and engineering. This will also raise our understanding of the environment and how it functions and adapts in response to change. The ability to observe changes now and back in time and into the future is therefore becoming possible and the path is open for this to occur routinely and on demand.
These new advances create significant opportunities for nature conservation as events and processes within the landscape can now be observed in near real time and historically. Much of the perceived complexity in obtaining and pre-processing imagery, and extracting information that is of practical use, has been overcome by the provision of analysis ready datasets and classification and change detection systems such as EODESM. Many of the algorithms used for the retrieval of environmental variables and classifications of landscape, as well as local to global products, are becoming openly and freely available and transparent, with these generated by scientists with decades of experience in earth observation. As illustration, the software used in the development and implementation of the EODESM system is open source and freely available and is based primarily on python scripts and the RSGISLib (Bunting et al. 2013; Clewley et al. 2014). Numerous options are becoming available for routinely evaluating the accuracy and reliability of these products, giving confidence to many users. For these reasons, earth observation datasets can now be better used to transform the way that our environment is managed and conserved. No longer are procedures and products remaining within the realms of the scientific community; they now can transition into being used to support nature conservation in a more practical sense. For this, we give credit to many individuals, groups and organisations (e.g., space agencies, governments and businesses such as Google) for facilitating free and public distribution.
References
Bunting, P., Clewley, D., Lucas, R.M., Gillingham, S.: The remote Sensing and GIS Software Library (RSGISLib). Comput. Geosci. 62, 206–226 (2013)
Clewley, D., Bunting, B., Shepherd, J., Gillingham, S., Flood, N., Dymond, J., Lucas, R., Armston, J., Moghaddam, M.: A python-based open source system for geographic object-based image analysis (GEOBIA) utilising raster attribute tables. Remote Sens. 6(7), 6111–6135 (2014)
Di Gregorio, A.: Land Cover Classification System (LCCS). Classification concepts and user manual for software version 2. FAO Environment and Natural Resources Series, 8, 190 pp (2005)
Feng, M., Sexton, J.O., Channan, S., Townshend, J.R.: A global, high-resolution (30 m) inland water body dataset for 2000: first results of a topographic-spectral classification algorithm. Int. J. Digit. Earth. 9(2), 113–133 (2016). doi:10.1080/17538947.2015.1026420
Giri, C., Ochieng, E., Tieszen, L.L., Zhu, Z., Singh, A., Loveland, T., Masek, J.L., Duke, N.: Status and distribution of mangrove forests of the world using earth observation satellite data. Glob. Ecol. Biogeogr. 20, 154–159 (2011)
Hall, D.K., Riggs, G.A.: MODIS/Terra Snow Cover 8-Day L3 Global 500 m Grid, version 6. Boulder, Colorado, USA. NASA National Snow and Ice Data Center Distributed Active Archive Center. doi:http://dx.doi.org/10.5067/MODIS/MOD10A2.006 (2016)
Hansen, M.C., Potapov, P.V., Moore, R., Hancher, M., Turubanova, S.A., Tyukavina, A., Thau, D., Stehman, S.V., Goetz, S.J., Loveland, T.R., Kommareddy, A., Egorov, A., Chini, L., Justice, C.O., Townshend, J.R.G.: High-resolution global maps of 21st-century forest cover change. Science. 342(6160), 850–853 (2013)
Kosmidou, V., Petrou, Z., Bunce, R.G., Mucher, C., Jongman, R.H., Bogers, M.M., Lucas, R.M., Tomaselli, V., Blonda, P., Pado-Schioppa, E., Manakos, I., Petrou, M.: Harmonization of the land cover classification system (LCCS2) with the General Habitat Categories (GHC) classification system. Ecol. Indic. 36, 290–300 (2013)
Langanke, T., Büttner, G., Dufourmont, H., Iasillo, D., Probeck, M., Rosengren, M., Sousa, A., Strobl, P., Weichselbaum, J.: GIO land (GMES/Copernicus initial operations land) High Resolution Layers (HRLs) – summary of product specifications. ESA GIO Land Team. 16p (2013)
Lucas, R., Blonda, P., Bunting, P., Jones, G., Inglada, J., Arias, M., Kosmidou, V., Petrou, Z., Manakos, I., Adamo, M., Charnock, R., Tarantino, C., Mucher, C.A., Jongman, R., Kramer, H., Arvor, D., Honrado, J., Mairota, P.: The Earth Observation Data for Habitat Monitoring (EODHaM) System, JAG. Int. J. Appl. Earth Observ. Geoinf. Spec. Issue Earth Obser. 37, 17–28 (2014)
Merchant, C.J., Le Borgne, P., Marsouin, A., Roquet, H.: Optimal estimation of sea surface temperature from split-window observations. Remote Sens. Environ. 112(5), 2469–2484 (2008)
Nagler, T., Rott, H.: Retrieval of wet snow by means of multitemporal SAR data. IEEE Trans. Geosci. Remote Sens. 38(2), 754–765 (2000)
Pasolli, L., Notarnicola, C., Bertoldi, G., Bruzzone, L., Remelgado, R., Greifeneder, F., Niedrist, G., Della Chiesa, S., Tappeiner, U., Zebisch, M.: Estimation of soil moisture in mountain areas using SVR technique applied to multiscale active radar images at C band. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 8(1), 262–283 (2015)
Pekel, J.-F., Cottam, A., Gorelick, N., Belward, A.S.: High-resolution mapping of global surface water and its long-term changes. Nature 540(7633), 418–422 (2016)
Rana, F.M., Adamo, M., Pasquariello, G., De Carolis, G., Morelli, S.: LG-Mod: a modified local gradient (LG) method to retrieve SAR sea surface wind directions in marine coastal areas. J. Sens. 2016(8), 1–7 (2016)
Sexton, J.O., Song, X.-P., Feng, M., Noojipady, P., Anand, A., Huang, C., Kim, D.-H., Collins, K.M., Channan, S., DiMiceli, C., Townshend, J.R.G.: Global, 30-m resolution continuous fields of tree cover: landsat-based rescaling of MODIS vegetation continuous fields with lidar-based estimates of error. Int. J. Digit. Earth. 6(5), 427–448 (2013)
Tomaselli, V., Panayotis, D., Marangi, C., Kallimanis, A., Adamo, M., Tarantino, C., Panitsa, M., Terzi, M., Veronico, G., Lovergine, F., Nagendra, H., Lucas, R., Mairota, P., Mucher, S., Blonda, P.: Translating land cover/land use classifications to habitat taxonomies for landscape monitoring: a Mediterranean assessment. Landsc. Ecol. 28(5), 905–930 (2013)
Verbesselt, J., Hyndman, R., Zeileis, A., Culvenor, D.: Phenological change detection while accounting for abrupt and gradual trends in satellite image time series. Remote Sens. Environ. 114, 2970–2980 (2010)
Yang, H., Li, S., Chen, J., Zhang, X., Xu, S.: The standardization and harmonization of land cover classification systems towards harmonized datasets: a review. Int. J. Geo-Inf. 6, 154–170 (2017)
Acknowledgements
The authors would like to thank all participants of the H2020 ECOPOTENTIAL and FP7 BIOSOS funded projects. This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 641762.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer International Publishing AG
About this chapter

Cite this chapter
Lucas, R., Mitchell, A. (2017). Integrated Land Cover and Change Classifications. In: Díaz-Delgado, R., Lucas, R., Hurford, C. (eds) The Roles of Remote Sensing in Nature Conservation. Springer, Cham. https://doi.org/10.1007/978-3-319-64332-8_15
Download citation
DOI: https://doi.org/10.1007/978-3-319-64332-8_15
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-64330-4
Online ISBN: 978-3-319-64332-8
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)