
Abstract
The identification of a model able to relate the deformation of Shape Memory Alloy (SMA) wire to a state variable easily measured is widely studied in recent years. The electric resistance (ER) of a SMA wire varies depending on its martensite and austenite fraction, so the determination of the biunivocal relationship between the wire shortening and its electric resistance allows “previewing” the position of the SMA wire. In this way the resistance of the SMA wire can be used as feedback variable in a control system. A test bench was first used to determine the above mentioned relationship, and then this relation is used in a fuzzy control system to impose a desired position to a SMA wire and to check the response of the device. This type of control doesn’t need a position sensor, which is a certain advantage in terms of cost, overall dimensions and weight for possible applications. The performances of this position control with resistance feedback are good and adequate for many applications; in particular it will be suitable for all applications which do not dispose of space to place a position sensor—like in aerospace applications or micro manufacturing.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Many studies have been carried out by various researchers with the aim of identifying a model to relate the deformation of Shape Memory Alloy (SMA) wire to a state variable of the same wire easily measured. The purpose of these researches is easy to understand: exactly knowing the deformation of the wire, see the position of one end of a straight wire when the other end is fixed, with an indirect measurement of an internal quantity of the wire, makes unnecessary the use of a position sensor to perform the control. In addition, a mathematical model effectively describing the complex behaviour of a SMA wire is very difficult to find; this is why researchers often prefer to consider the wire as a “black box”, taking into account only the inputs and related outputs to design the control.
Cho et al. [1] studied the behaviour of a NiTiCu SMA wire, obtaining interesting results with an experimental set-up with strain gauge. Ma and Song [2, 3] developed an electrical resistance feedback control system for position regulation of a spring-biased NiTi SMA wire actuator.
Song et al. [4] designed a control for SMA actuator wires using as a feedback signal the value of the voltage drop across the wire, the relationship between voltage and position being modelled with neural network.
These are recent interesting solutions, for example the use of the inductance of the wire as the state variable [5]; but using resistance as the state variable is widely used [6, 7]; also the author worked on a position control with PWM modulation and resistance feedback signal [8]. Another work of Song et al. [9] considers the resistance feedback with an original neural network to relate position and resistance.
In the present research we decided to work on a resistance feedback using a fuzzy logic for the control. The fuzzy logic is particularly suitable in case of phenomena like the behaviour of SMA devices, in which there are uncertainties or no detailed information about the constitutive model, with strong time dependence and nonlinearities [10].
Ultimately the use of a resistance feedback control with fuzzy logic in SMA wires actuating devices will lead to reduce overall dimensions and weight and definitively save money. This kind of approach seems to be more and more required in robotic applications, such as in servo-systems of aerospace vehicles and aircraft [11] or precision manufacturing and assembly [12].
2 Resistance Feedback Control with Fuzzy Logic
The selected SMA wire (Nitinol HT wire, diameter 250 μm, length 200 mm) shows the contracted shape at temperatures beyond 70 °C. To obtain the return to the other crystalline form it is necessary to cool it and to apply a bias tension on the wire axis direction (at least 35 MPa). The heating is obtained by Joule effect, the cooling is on calm air. Having one wire end fixed, it is possible to consider the wire shortening, caused by heating, as the upwards of the free end of the SMA wire. The words “position control” will refer to the position of the free end with respect to the fixed one. The wire must be firmly constrained under mechanical strain and heated by electric current. A position sensor is used during the characterization phase to measure the reached position of the free wire end.
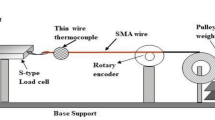
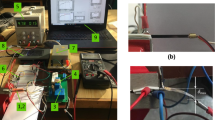
Figure 1 shows a sketch of the whole control test bench. The wire layout is simple and efficient: the SMA wire (1) is vertically arranged and connected at its ends to an insulated electric wire. On the upper side this wire is connected to the structure (2), on the lower side there is a suspended mass (3) of about 1 kg. The cursor of an inductive position sensor (4) is rigidly connected to the mass, sliding inside an external cylinder, fixed to the structure (LVDT Shaevitz E200). The arrow beside the wire indicates the heating/shortening direction, caused by Joule effect with a 12 V power supply (5).

Sketch of the test bench and its resistance feedback with fuzzy logic control
A computer with acquisition board executes the position control of the SMA wire with Matlab/Simulink® programming. The amplification device (6) amplifies the low power signal from DAQ and acquires the electric current magnitude flowing into the SMA wire. In particular, the DAQ card makes the acquisition of both the signal of the potential drop between the SMA wire ends and of the potential drop at a known resistance in series with the SMA wire, and it transmits the command signal necessary to control the SMA wire. Moreover it acquires the position sensor signal where required. The resistance has a value much less than the resistance of the SMA wire in order to measure the current.
A previously developed fuzzy control [13] had a similar hardware but using the LVDT output as the feedback signal. The originality of the present study is on the comparison with a “previewed” position, instead of a measured position coming from a sensor, on the comparison block. This is possible because it is well known that the electric resistance of a SMA wire varies depending on its martensite and austenite fraction. This property can be used to create a biunivocal relationship between the wire end position (length) and its electric resistance; in this way it will be possible to “preview” the real position of the SMA wire. It is possible to calculate the reached position by measuring the electric resistance thanks to a little resistance placed in series with the SMA wire and causing a little voltage drop. The first Ohm law allows calculating the current passing both through the resistance and the wire. The voltage drop VSMA and the current ISMA of the wire can be used to calculate the desired resistance: \( R_{SMA} = V_{SMA} /I_{SMA} \)
With the experimental tests above described it is possible to evaluate the relationship between the reached position y (SMA wire length) and its electric resistance R. This relationship was linearized, thus the equation \( y = a \cdot R + q \) allows calculating the previewed position.
This control doesn’t need a position sensor and this is a certain advantage in terms of money, overall dimensions and weight when using the device in applications. A possible drawback is the precision of this control that might be probably less accurate than that of a position feedback control.
3 Open Loop Tests
Experimental open loop tests were carried out in order to study the relationship between electric resistance and displacement of the Ni–Ti wire. These tests were necessary because the electric resistance variation is sensitive to many factors, such as heat treatment, exact alloy composition and manufacturing.
Tests under stress generated by different constant loads were performed. They showed that an increase of the load applied to the wire corresponds to a decrease of the amplitude of the hysteresis cycle; actually higher mechanical stresses cause a decrease of the R-austenite produced and an increase of the direct transformation from austenite to martensite. Moreover increasing the applied constant load causes an increase of the electric resistance corresponding to a fixed value of strain. The applied bias load was then increased until the hysteresis on the relationship between position and electric resistance nearly disappears. Figure 2 shows the relationship between position and electric resistance with a bias load of about 10 N. Data refers to 15 activation cycles with a sinusoidal input having the amplitude between 0.1 and 0.9 V and 1/60 Hz frequency. Figure 2 shows a very tight hysteresis cycle and a quite repeatable behaviour.

Relationship between position and electric resistance (constant bias load of about 10 N)
4 Relationship Between Position and Electric Resistance
In order to preview the SMA wire reached position it was decided to model the relationship between position y and electric resistance R with a simple straight line. Figure 3 shows a real curve (blue) and a linearized curve (red) with a = −12 and q = 43.

Representative cycle for the linearization of the electric resistance/position relationship in case of 10 N constant load
The model represents well the actuator stroke. As it is possible to see in the figure the wire maximum stroke is about 9 mm, but the linear behaviour is slightly reduced: the stroke that can be used during the closed loop resistance feedback is about 6 mm, from 1.5 to 7.5 mm.
The control was implemented in Matlab Simulink and is shown in Fig. 4. The error is generated by the comparison between the desired position and the previewed position, the real position being used as check information.

Block Diagram of the resistance feedback control
This kind of control is not better than a “normal” position control in terms of positioning precision, but it has the great advantage of not having the need to use a displacement sensor, which brings a number of advantages: less weight, overall dimensions and costs reduced.
5 Results
Various experimental tests have been carried out to validate the control system, in which the position sensor LVDT was used to compare the different results and not for the feedback.
Figure 5 shows one example of the test with square waveform. Here the desired position (dotted line) varies from 2 to 7 mm with frequency equal to 1/30 Hz; it is possible to compare the desired position with the previewed position and the reached position.

Square wave with frequency 1/30 Hz for resistance feedback with fuzzy control, at constant load of 10 N; comparison between desired position (dotted line), previewed position (blue) and reached position (red)
The first cycle is affected by errors due to the starting conditions and is not relevant; only when the desired position becomes greater than the previewed position the electric tension increases and the controller starts working effectively. As it can be seen from Fig. 5, there are little overshoots in the rise side (0.2 mm maximum), but the controller works well (with errors lower than 0.1 mm), and heating and cooling times are similar to the results obtained with the position feedback [13].
Figure 6 shows examples of tests with sine wave of 5 mm amplitude (from 2 to 7 mm of the wire stroke) at different frequencies (1/60, 1/15 and 1/6 Hz respectively). There is no unsteadiness, regardless the sine wave frequency.

Examples of tests with sine wave with 5 mm amplitude (from 2 to 7 mm of the wire stroke) with different frequencies (1/60, 1/15 and 1/6 Hz respectively) and constant load of 10 N
Figure 7 shows the results for a test in which the reference position is a step function with single step height equal to 1 mm and step time of 20 s. There are five rising steps, corresponding to a heating phase, and five fall steps, corresponding to a cooling phase. The real position during rising is nearly the same as the desired position; whereas during the falling there are differences, due to the modelling of the hysteresis cycle.

Example of test with step wave at constant load of 10 N
6 Conclusions
On the whole, the overall performances of the position control with resistance feedback are good and adequate for many applications; in particular it is suitable for all applications in which there is no physical space to place a position sensor. The possibility of controlling the position without a specific position sensor represents a serious advantage, causing a positive outcome in terms of simplicity of the device and cheapness.
References
Cho, H., Yamamoto, T., Takeda, Y., Suzuki, A., Sakuma, T.: Exploitation of shape memory alloy actuator using resistance feedback control and its development. Prog. Nat. Sci. Mater. Int. 20, 97–103 (2010)
Ma, N., Song, G.: Control of shape memory alloy actuators using pulse-width pulse-frequency (PWPF) modulation. J. Intell. Mater. Syst. Struct. 14, 15–22 (2003)
Ma, N., Song, G.: Control of shape memory alloy actuators using pulse width modulation. Smart Mater. Struct. 12, 712–719 (2003)
Song, G., Chaudhry, V., Batur, C.: A neural network inverse model for a shape memory alloy wire actuator. J. Intell. Mater. Syst. Struct. 14, 371–377 (2003)
Kim, H., Han, Y., Lee, D., Ha, J., Cho, K.: Sensorless displacement estimation of a shape memory alloy coil spring actuator using inductance. Smart Mater. Struct. 22(2), 391–398 (2013)
Selvarani Ruth, D.J., Sunjai Nakshatharan, S., Dhanalakshmi, K.: Differential resistance feedback control of a self-sensing shape memory alloy actuated system. ISA Trans. 53(2), 289–297 (2014)
Wang, T., Shi, Z., Liu, D., Ma, C., Zhang, Z.: An accurately controlled antagonistic shape memory alloy actuator with self-sensing. Sensors 12(6), 7682–7700 (2012). doi:10.3390/s120607682
Raparelli, T., Zobel, P.B., Durante, F.: SMA wire position control with electrical resistance feedback. In: Proceedings of 3rd World Conference on Structural Control, Como, Italy, vol. 2, pp. 391–8 (2002)
Ma, N., Song, G., Lee, H.-J.: Position control of shape memory alloy actuators with internal electrical resistance feedback using neural networks. Smart Mater. Struct. 13, 777–783 (2004)
Nguyen, B.K.: Modelling and control of shape memory alloy actuators by using Preisach model, genetic algorithm and fuzzy logic. Mechatronics 18(3), 141–152 (2008)
Shi, Z., Wang, T., Liu, D., Ma, C., Yuan, X.: A fuzzy PID-controlled SMA actuator for a two-DOF joint. Chin. J. Aeronaut. 27(2), 453–460 (2014). ISSN 1000-9361
Bassiuny, A.M., Ismail, M.A., Bakr, E.M.: Fuzzy incremental controller for SMA smart actuator with application to micro-positioning. J. Control Eng. Technol. 4(1), 58–65 (2014)
Maffiodo, D., Raparelli, T., Belforte, G.: Fuzzy Logic Position Control of a Shape Memory Alloy Wire. Ventil 136–145, April, ISSN: 1318-7279 (2010/2)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer International Publishing Switzerland
About this paper
Cite this paper
Maffiodo, D., Raparelli, T. (2016). Resistance Feedback of a Shape Memory Alloy Wire. In: Borangiu, T. (eds) Advances in Robot Design and Intelligent Control. Advances in Intelligent Systems and Computing, vol 371. Springer, Cham. https://doi.org/10.1007/978-3-319-21290-6_10
Download citation
DOI: https://doi.org/10.1007/978-3-319-21290-6_10
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-21289-0
Online ISBN: 978-3-319-21290-6
eBook Packages: EngineeringEngineering (R0)