

Overview
- Recent research in Service-oriented Agent Architecture for Autonomous Maritime Vehicles
- Presents an innovative autonomous control approach
- Devoted to cutting-edge maritime robotics and advanced control software architecture
Part of the book series: Studies in Systems, Decision and Control (SSDC, volume 29)
Buy print copy
About this book
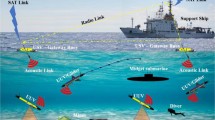
This book presents an Intelligent Control Architecture (ICA) to enable multiple collaborating marine vehicles to autonomously carry out underwater intervention missions. The presented ICA is generic in nature but aimed at a case study where a marine surface craft and an underwater vehicle are required to work cooperatively. It is shown that they are capable of cooperating autonomously towards the execution of complex activities since they have different but complementary capabilities. The ICA implementation is verified in simulation, and validated in trials by means of a team of autonomous marine robots. This book also presents architectural details and evaluation scenarios of the ICA, results of simulations and trials from different maritime operations, and future research directions.
Similar content being viewed by others

Keywords
Table of contents (7 chapters)
Authors and Affiliations
Bibliographic Information
Book Title: Intelligent Autonomy for Unmanned Marine Vehicles
Book Subtitle: Robotic Control Architecture Based on Service-Oriented Agents
Authors: Carlos C. Insaurralde
Series Title: Studies in Systems, Decision and Control
DOI: https://doi.org/10.1007/978-3-319-18778-5
Publisher: Springer Cham
eBook Packages: Engineering, Engineering (R0)
Copyright Information: Springer International Publishing Switzerland 2015
Hardcover ISBN: 978-3-319-18777-8Published: 25 June 2015
Softcover ISBN: 978-3-319-36924-2Published: 15 October 2016
eBook ISBN: 978-3-319-18778-5Published: 09 June 2015
Series ISSN: 2198-4182
Series E-ISSN: 2198-4190
Edition Number: 1
Number of Pages: XXVI, 231
Number of Illustrations: 83 b/w illustrations, 18 illustrations in colour
Topics: Computational Intelligence, Robotics and Automation, Control and Systems Theory