
Abstract
Automated vehicles (AVs) are increasingly recognized as having the potential to decrease carbon dioxide emissions and petroleum consumption through mechanisms such as improved efficiency, better routing, and lower traffic congestion, and by enabling advanced technologies. However, AVs also have the potential to increase fuel consumption through effects such as longer distances traveled, increased use of transportation by underserved groups, and increased travel speeds. Here we collect available estimates for many potential effects and use a modified Kaya Identity approach to estimate the overall range of possible effects. Depending on the specific effects that come to pass, widespread AV deployment can lead to dramatic fuel savings, but has the potential for unintended consequences.
The original version of this chapter was revised: Chapter title has been updated. The erratum to this chapter is available at https://doi.org/10.1007/978-3-319-05990-7_22
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
1 Introduction
Self-driving or fully “automated” vehicles (AVs) have rapidly moved from science fiction into the forefront of transportation technology news, with many automakers now demonstrating vehicles with some automation capability. Highly or fully automated vehicles are likely still years away from widespread commercial adoption [1], but this recent progress makes it worth considering the potential national impacts of widespread implementation. In addition to the expected safety and social benefits, widespread adoption of AVs has the potential for significant impacts on transportation energy use. This chapter makes an initial assessment of the energy impacts of AV adoption on a per-vehicle basis and the potential for AVs to change total personal vehicle fuel use. While AVs offer numerous potential advantages over conventional vehicles (CVs) in energy use, there are also significant factors that could decrease or even eliminate the energy benefits under some circumstances. This analysis attempts to describe, quantify, and combine many of the possible effects. The nature and magnitude of these effects remain highly uncertain, and further analysis in the coming years of each of these effects and the system as a whole will be needed to steer AV development in a way that captures the potential energy benefits.
2 Methods
National-scale modeling of the possible interactions with AVs and the transportation system of the future is not yet available. AVs have the potential to interact with each other, the transportation infrastructure, and the built environment in such complex ways that it is likely to take years of dedicated research to have a detailed assessment of the possible impacts of the future system.
For this effort, individual and combined impacts are assessed based on a modified Kaya Identity [2]. The Kaya Identity is an equation relating factors that determine the level of human impact on carbon dioxide (CO2) emissions, which is often applied to specific sectors such as transportation. It divides emissions into “factors” of use intensity (UI), energy intensity (EI), and carbon intensity so that each can be examined in detail. For this analysis, we modify the identity in two ways. First, populations of AVs and CVs are separated by dividing the Kaya components into an AV and a CV term. This is so we can track the effect of different parameters as well as the impact of different fractions of AVs. Second, we use liquid fuel demand as the final output rather than CO2 to isolate this issue from the CO2 intensity of electricity or other fuels.
Fuel Demand
The product comprising the first term in the brackets represents fuel use by AVs and the second term by CVs. We refer to factors affecting vehicle miles traveled (VMT)/vehicle as “use intensity” (UI); factors affecting Energy/VMT as “energy intensity” (EI); and factors affecting Liquids/Energy (e.g., electric vehicles use no liquid fuels) as “fuel intensity” (FI). This method was implemented in an Excel spreadsheet.
Each potential impact examined in this analysis was translated into one or more effects on the terms in the equation above. Where possible, we adapt estimates from other sources as they might apply to AVs. Effects are generally assumed to be independent for this analysis, so impacts are chain multiplied to combine. In reality, system effects are likely to be significant but those interactions are beyond the scope of this analysis.
Note that a number of the impact estimates implemented in this analysis were identified and coopted from literature not necessarily describing AVs. For example, we use a study of eco-driving to estimate the possible benefits from smoothing starts and stops from AVs, assuming that they could be designed to capture those benefits at least as well as a human driver. In general, we collected and documented the maximum plausible impact identified, so the impacts here should be viewed as an estimate of the upper bound of each effect. Depending on implementation or other factors, each impact could be smaller.
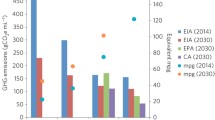
This analysis uses 2030 as an example year for reference when determining the baseline. This is not intended to be predictive, only as a point for comparison. For the baseline, we assume 262 million vehicles, a 38.5-mpg on-road reference new light-duty vehicle, and 12,700 miles per vehicle per year [3]. CV values are left at baseline for this analysis for clarity; future analysis could examine the relative impacts of simultaneous improvements in CVs.
3 Effects Considered
We surveyed the developing literature on AVs to identify possible effects on energy use. Many possible impacts are mentioned in published papers and the popular press, but most are not rigorously quantified. Where possible, we have identified methods to quantify each potential effect. This set of effects is very unlikely to be exhaustive, but this analysis approach can serve as a basis for future estimates.
Recently, the US Department of Transportation released a policy statement on AVs that defined four levels of automation based on the degree of autonomy [4]. Most of the effects identified here require level 3: Limited Self-Driving Automation or level 4: Full Self-Driving Automation. Therefore, this study represents an assessment of the full potential of AVs, not the intermediate benefits of partial automation. Note also that AVs could become integrated into the broader vehicle population through a variety of approaches such as mixed-use operation with CVs on existing roadways or segregated operation on dedicated AV infrastructure. This high-level analysis does not endeavor to predict a specific implementation path, but consistent with the objective to estimate upper-bound effects, the analysis does draw assumptions from scenarios where the effects may be greatest. This is particularly true for system-level effects such as traffic flow smoothing where the impact would be greatest for AVs on dedicated infrastructure rather than AVs mixed in with CVs.
3.1 Individual Vehicle Effects
Some possible effects of AVs do not require strong system effects and could manifest themselves with only a few AVs on the road and where most AVs are owned by individuals. Table 1 summarizes the impacts and the sources used to support each assumption.
3.1.1 Platooning
Platooning is the proposed and demonstrated method of groups of vehicles travelling close together at high speed. This has the potential to reduce EI resulting from aerodynamic drag. Although platooning energy benefits would certainly be greatest on a dedicated infrastructure, there could also be ample opportunity for groups of two or more AVs to platoon together on mixed-use infrastructure. The exact impacts depend strongly on the shape of the vehicles, the number of vehicles, the fraction of time spent on the highway, the following distance between vehicles, and the particular algorithms used by the vehicles. AVs have the potential to allow safe following at close distances, and as long as there are enough AVs to find each other on highways, this could yield significant savings. This analysis surveyed three sources [5–7] that each produced similar estimates—approximately 10 % overall savings potential (or about 20 % savings during the roughly 50 % of travel occurring on the highway). Note that while the analysis in this chapter focuses on the energy implications for automation of light-duty passenger vehicles (the largest fuel-consuming road vehicle segment, accounting for 59 % of transportation fuel use in 2011 [8]), commercial vehicles would also be expected to achieve benefits, and in the case of Class 8 tractor-trailers (the largest heavy-duty vehicle fuel consumer) the energy savings due to platooning would be particularly significant given their high percentage of highway cruising miles.
3.1.2 Efficient Driving
This effect represents the energy savings from improved vehicle operation of AVs relative to the average human driver. It is well documented that smoother starts and stops can improve fuel economy of otherwise identical vehicles. To estimate the size of this effect, we reference recent eco-driving analyses that identify potential fuel savings for aggressive drivers as high as 20–30 % [9, 10]. The fuel savings for drivers who are not at the most aggressive end of the spectrum would be significantly less, but considering AVs’ ability to constantly maintain eco-driving vigilance, we assume an upper bound of 15 % for the potential widespread improvement in EI (even absent specific traffic-smoothing assumptions).
3.1.3 Efficient Routing
Smart routing to the most energy efficient route has the potential to save energy in addition to efficient operation. This could be due to avoidance of traffic, use of a shorter but modestly slower route, or selection of a route with fewer stops. Of the few quantitative efficient routing impact estimates found in our literature review, one case study in the Buffalo, NY area estimated up to 20 % total reduction in EI as possible [11]. However, this estimate really represented a potential system-level impact of re-routing some vehicles in order to improve the operating efficiency for all vehicles on the traffic network. Another recent study of efficient routing for a plug-in electrified vehicle (PEV) identified up to 5 % overall energy savings [12], taking into account times when the default route already represented the most efficient route, and not taking into account traffic flow impacts from all vehicles simultaneously optimizing system-level routing efficiency. Because system-level traffic smoothing impacts will be separately considered, 5 % was taken as the widespread upper bound EI improvement for this analysis. Note that CVs using global positioning system (GPS)-connected navigation systems and real-time traffic information could also advise their drivers of the most efficient routing decisions; however, this by itself arguably represents one step down the vehicle automation and connectivity continuum. Widespread realization of the maximum efficient routing benefit for every trip would also most realistically be achieved by AVs.
3.1.4 Travel by Underserved Populations
The young, disabled, and elderly travel less per capita than other groups. AVs have the potential to serve these populations by allowing use of a vehicle without needing to provide direct operation. It is not known exactly how many people would choose to travel more if given the chance to do so without needing to operate the vehicle, and we did not identify any published estimates for use here. Instead, we examined data from the 2009 National Highway Transportation Survey [13] and the 2003 “Freedom to Travel” study [14]. As expected, travel varies significantly by age, with a peak at age 40 and is lowest during childhood and old age (Fig. 1). In principle, if all segments traveled as much as the 40-year-old segment then the miles of travel distribution would rise upward to align with the population distribution shown in Fig. 1. That method would yield an increase in miles of 70 %, but would seem to overstate extra travel even for this upper bound analysis. We instead estimate that increased travel under this effect could reach up to 40 %, which corresponds with each population segment from age 16 to 85 traveling as much as the top decile.


Relative travel by segments of the population
Additionally, the 19 % of Americans who are disabled individuals [15] leave the home less frequently, are less likely to travel by car, and take fewer long distance trips, resulting in fewer miles per person [14]. If AVs allow disabled individuals to make the same length and number of car trips, their per-capita VMT could increase by more than 50 %. Because we do not have the data to address interactions with the age-based approach discussed above, we do not include this as a separate factor and instead take the 40 % estimate to include increased travel by disabled individuals. It should be emphasized that providing better transportation services to these populations would yield significant social benefits, which should not be overlooked or ignored when considering energy impacts (see “Other Effects”).
3.2 System Effects
Widespread AV use may make private ownership less necessary, with users instead summoning a shared-use vehicle for their immediate need. Widespread adoption without vehicle sharing is also possible and would represent a subset of these effects. The effects noted below become possible as penetrations increase so the majority of vehicles on the road are automated. The previously reviewed individual vehicle effects are also assumed to persist at high penetration levels.
3.2.1 Efficient Driving (Additional)
This category of impact is the additional efficient driving made possible by system effects if most or all vehicles are automated. This could manifest, for example, as no stopping required at intersections due to smart intersection control [16]. Savings here are assumed to be from complete elimination of traffic-related stopping and starting, which has been estimated to yield up to a 40 % reduction in EI [9]. This is not cumulative with the previous 15 % savings number identified above, so we reduce this effect to 30 % (to give a cumulative roughly 40 % reduction when chain multiplied). A question for future work is how much of the 5 % savings estimated for smart routing could still be counted separately as this estimate includes traffic avoidance as well as distance tradeoffs. This outer-bound impact assessment will continue to treat it as a separate effect.
3.2.2 Faster Travel
Due to increased safety of AVs, significantly faster travel may be viable on highways. Faster travel is known to increase air resistance energy loss with the square of velocity. Because of this, drag losses could become very significant at high speeds. To estimate the possible impact, we extrapolate from observations over multiple years on the speed-limitless German Autobahn [17] and assume 100-mph travel on highways becomes legal and routine due to automation. A study for fueleconomy.gov that measured the impact of speed increases in 10-mph increments to 80 mph reported that each 10-mph increase results in a 13.9 % increase in energy use [18]. In practice, precisely estimating the increased energy use out to 100 mph would require detailed assumptions about vehicle aerodynamic improvements that may occur in conjunction with such regular high-speed operation, as well as the efficiency profile for the evolved powertrain in the AV. For this high-level analysis, we take rough extrapolation of the results in [18] as sufficient, and assume the combination of increased highway energy use with the fraction of driving miles occurring on the highway (around half currently) could result in a 30 % aggregate increase in EI.
3.2.3 More Travel
There are several reasons travel per person might increase under an AV scenario. First, due to faster highway travel (above) and reduced traffic, time spent driving could decrease. Schaefer et al. observed that people on average are willing to spend a very consistent amount of time travelling across a wide variety of societies [19]. Therefore, if travel were faster overall, people might live farther from their destinations or travel to more. This is the method we use, estimating the increase in VMT per person that would keep the time travelling constant, an increase of approximately 50 %. Another consideration (not included as an additional factor here) is that travelers might not mind time in the vehicle as much because they could engage in other tasks due to automation. One subject for future study would be to see if this reduced “cost” for time while traveling in an AV might take away from other modes (such as long-distance rail or air travel) and therefore have a somewhat counteracting decrease in energy use for those sectors.
3.2.4 Lighter Vehicles and Powertrain/Vehicle Size Optimization
A fleet composed predominately of AVs could also allow vehicles to be dramatically lightweighted and have more efficiency-optimized powertrains. This is partially because collision safety features might be obviated and partially because, in a shared-use model, the vehicle used could be matched to the duty cycle required.
In a future fleet where vehicle collisions are virtually unknown, there would no longer be a need for large-framed vehicles for collision-safety purposes. This could allow a large portion of the weight of the vehicle to be reduced. It should be noted, however, that widespread lightweighting to this extreme would take a long time to occur due to the chicken-vs.-egg problem of reluctance to reduce AV size as long as they interact with heavier and less safe CVs on shared roadways.
As an example of vehicle size optimization for duty cycle matching, most driving could be served with a small, “Smart Car”-like vehicle, with larger vehicles being reserved for rarer trips with high cargo needs or more occupants. A shared use scenario with AVs summoned as needed could thus avoid inefficient commuting by a single passenger in large fuel consuming vehicles. Powertrain optimization/size reduction (and corresponding efficiency improvements) could also occur as an evolutionary response to drive profile smoothing from widespread AV use. CVs typically have power capabilities far in excess of their average power requirements to satisfy occasional high-power demands, such as from hard accelerations (needed for freeway passing of other CVs, and for viscerally satisfying the human driver/owner). AVs that permit passengers to devote their attention to other diversions may not need such excess power capability.
These two factors—safety-enabled lightweighting and smart rightsizing—will interact in complex ways. There are obviously limits to the total downsizing possible even if both of these effects are fully realized. The two could also have positive interactions, as when vehicles shed weight their power requirements would likewise diminish, and the smaller powertrain would itself weigh less, further reducing its power requirements.
Here we use two methods to estimate a potential energy impact. First, we take the Burns et al. reported possibility (primarily based on the safety effect) of a 75 % lighter fleet [20]. Several references cite a 6–8 % EI reduction for each 10 % reduction in weight [21–23], which would result in a roughly 50 % improvement overall. Recognizing the uncertainty from such an extended extrapolation we also consider an alternative method to estimate the relative efficiency improvement for AVs with low acceleration power requirements. For this method we observe that the sales-weighted average fuel economy of modern light-duty vehicles [24] is roughly half that of the 47-mpg 1994 Geo Metro [25], and therefore estimate that the significant energy savings impact of powertrain/vehicle size optimization could reach 50 %. Because the interactions between safety-enabled lightweighting and smart rightsizing are challenging to determine in advance, here we just use 50 % as an overall potential impact.
3.2.5 Less Time Looking for Parking
Americans use a significant amount of time and energy during city driving searching for parking. AVs could seamlessly integrate into a smart transportation system and either find open parking or drop off the occupants without the need to park. The Texas Transportation Institute reported that the fuel wasted is 19 gallons per person per year. If we assume that amount could be cut in half by AVs (which would still need to park somewhere, but would not need to search), that would be a 4 % reduction in UI.
3.2.6 Higher Occupancy
AVs have the potential to increase vehicle occupancy in some cases. In a shared-use model, multiple options could be available to a user, including a cheaper trip that involves sharing the vehicle with other users, similar to the airport shuttle model of transit. How many users would opt for this is highly uncertain. Here we assume AVs allow the higher end of potential impact of “dynamic ridesharing” as reviewed by the Transportation Energy Futures study, which includes accounting for trip characteristics [27]. That is a 12 % reduction in UI.
3.3 Vehicle Electrification
PEVs are inherently well suited for automation thanks to their drive-by-wire controls and electric actuation systems. Likewise, AVs may be more amenable to electrification than CVs, because a vehicle can be dispatched to meet a user’s specific need, only serving trips within range (consistent with the duty cycle matching discussion in the above section on powertrain/vehicle size optimization). AVs would also reduce or eliminate PEV infrastructure challenges since they would be aware of the availability and location of charging options. Lastly, because upfront cost is currently a barrier to PEVs, distributing that cost over many users can increase the relative competitiveness of PEVs as an option for many trips. While the potential more travel/on-demand AV system effects could cause range limitation issues to persist, it is conceivable that vehicle recharging could be coordinated in between scheduled trips. Having greater driving miles would also increase the importance of operating cost considerations, as well as the potential for lower cost fuels (such as electricity, even with occasional liquid fuel range extension) to pay back an initial vehicle purchase price premium.
While vehicle electrification could certainly happen anyway, the above arguments explain why AVs may make broad PEV penetration more likely. The key factor here is estimating the fraction of vehicles that could easily be electrified under an AV scenario. Absent a large number of additional assumptions, we generate our high-level estimate from an analysis based on NHTS data of the number of trips by length. We assume that vehicles satisfying trips of fewer than 40 miles could be replaced by electric vehicles. This would allow 75 % of the fleet to be electric vehicles, resulting in a 75 % decrease in FI. This is only the petroleum FI; the electricity would need to be produced and the method of production could affect the total energy and carbon intensity of the vehicle fleet. Those factors are beyond the scope of this chapter.
3.4 Summary of Effects
Figure 2 highlights the potential for the above effects to vary from large increases in fuel use to large savings, depending on the scale and interaction of the various factors. Figure 3 illustrates the range of combined impacts when organized by intensity factor (UI, EI, and FI). Above the axis are the combined potential effects to increase energy use in that factor. Below the axis are the combined potential effects to decrease energy use. This illustration suggests that AVs would probably make us drive more miles but in a more efficient way and potentially on alternative fuels.


Summary of effects


Impacts by factor
To further estimate the range of possible net impacts, we combined the effects above into several simple scenarios, summarized in Table 2 and illustrated in Fig. 4. There is a potential for fuel use increase of up to +173 % (more than doubling of energy use) if only service demand and speed increases occur. This could potentially happen if AVs expand access and increase safety and speed, but are not designed to operate more efficiently, be electrified, or to be lighter weight.


Scenario impacts
There is also a potential for a fuel use reduction of up to 96 % if all the possible savings are captured and there are no corresponding energy use increases. This could potentially happen if AVs are designed with energy-saving features as a central design parameter, but access to AVs does not for whatever reason lead to service demand increase or higher highway speeds. This might mean missing many of the non-energy social benefits (see below) that could accompany AVs.
If all effects are combined to the maximum potential identified in Table 1 and Fig. 2, we would still expect significant savings. This is because the service demand effects are overwhelmed by the decreases from efficiency and electrification. This scenario has the potential to yield large energy savings while also capturing many of the social benefits of increased transportation service and speed. However, it remains highly uncertain which of these effects will manifest themselves, and to what degree.
4 Other Effects
AVs would have many potential effects not covered here because they have non-energy impacts or the energy impacts cannot be reflected with the Kaya identity approach. Some include:
4.1 Faster Fleet Turnover
Even at the peak usage time, only 12 % of vehicles are on the road, so in a shared-use model with many AVs there could be many fewer total vehicles at a given time. Because these vehicles would be driven much more, manufacturing energy may not be significantly affected. However, with a faster vehicle turnover new technology could be rolled out faster.
4.2 Air Quality
More efficient use of fuel and the transition to electric vehicles could also improve air quality because less fuel combusted in the vehicle means fewer tailpipe emissions. A smart transportation system could also implement other air quality policies such as charging extra for pollution-causing trips on poor air quality days.
4.3 Economic Benefits
In shared-vehicle scenarios, a vehicle’s capital cost would be spread over many users, resulting in lower transportation costs. Lower fuel use could also save drivers money spent at refueling stations. Shared AVs could also lower vehicle insurance, vehicle registration fees, parking permits, and other costs that coincide with private ownership. Reducing these necessary payments could be particularly attractive to portions of the populations that prefer carpooling to common destinations, live in apartments with inadequate available parking spaces, drive infrequently, or cannot currently afford transportation service.
4.4 Social Benefits of Transportation Access
In the energy impacts section, we report that addition of travelers could increase energy use. However, this would be as a result of significant expanded valuable transportation services and higher equity as transportation is available to more people. People of all ages and health conditions would have more convenient access to transportation than prior unprivileged options. Diverse benefits range from transporting children to school and extracurricular activities to transporting elderly citizens to health appointments and social engagements.
4.5 Land Use Benefits
With smaller and possibly fewer vehicles on the road, cities could repurpose land from parking and potentially in transportation corridors. Less use of land could minimize traffic congestion and therefore decrease travel time. More steady flows of traffic and less frequent instances of humans sitting in non-moving vehicles could also reduce fuel normally wasted from idling and lessen the concentration of tailpipe greenhouse emissions. Alternatively, parking or road space could be repurposed into private development or shared-use spaces such as parks.
4.6 Safety Benefits
Benefits would include less loss of life and injury as well as fewer vehicle replacements before the end of its usable life. Vehicle automation technology could consistently evade common vehicle accidents that are due to human error in judgment. The technology has the potential to be more reliable and would be less affected by distractions, including sleep deprivation, anxiety, consumption of alcohol, and uncooperative passengers. Communication between programmed autonomous vehicles (“V2V”) could be a component of automation and can enhance the ability to avoid vehicle collisions because they would have consistent and precise spatial awareness, even beyond line-of-sight.
4.7 Interaction with Mass Transit
AVs could solve the “first and last mile” problem and lower labor costs for transit, but could also make transit less competitive. The “first and last mile” problem would be resolved by adding an additional paratransit mode of transportation to and from mass transit hubs that would have otherwise been inconvenient or required expensive parking. If automation could be expanded to buses and rail, lowering labor costs for transit would decrease costs in the transit sector and improve its competitiveness. However, the adoption of AVs may decrease the number of mass transit users since AVs could, if inexpensive, compete for transit users. Alternately, the lines between shared and individual transit could simply blur through implementation of an on-demand AV scenario with discounts offered for ride-sharing.
5 Future Analysis Needs
Additional analysis is needed to address several key remaining gaps. First, the literature would benefit from revisiting many of the factors described here with a specific look towards AVs. Second, the range of possible effects identified here highlights the critical importance of assessing system effects and interactions between effects to help distinguish the likelihood of various outcomes. Lastly, and potentially most importantly, there is a need for evaluation of the specific implementation decisions that will define where in this range of possible effects we end up. This may require ongoing analysis as AVs are deployed in test markets to measure effects. Each of these would require, or at least benefit from, the development of transportation system models that can incorporate AVs in various implementations and at many geographic scales.
6 Conclusion
The potential safety and social benefits of AVs are rapidly becoming widely recognized, but possible effects on energy use are often minimized or ignored. We find that AVs have the potential to make dramatic impacts on transportation energy use by individuals. Most possible effects on energy intensity may enable liquid fuel savings, but many effects on use intensity could counteract this or even lead to increases in fuel use, depending on the specific scenario. Our estimates of possible impacts range from more than 90 % fuel savings (if only energy benefits occur) to more than 150 % increase in energy use (if only energy increases are considered). At this very early stage, further investigation is recommended to improve understanding of the various effects identified in this chapter, but consideration of energy impacts will clearly be important when developing and implementing AV deployment strategies.
References
Knight W (2013) Driverless cars are further away than you think. MIT technology review http://www.technologyreview.com/featuredstory/520431/driverless-cars-are-further-away-than-you-think/. Accessed 19 Nov 2013
Kaya Y (1990) Impact of carbon dioxide emission control on GNP growth: Interpretation of proposed scenarios. Presented to the IPCC Energy and Industry Subgroup, Response Strategies Working Group, Paris
Annual Energy Outlook 2013 (2013) Publication DOE/EIA-0383(2013). US Energy Information Administration http://www.eia.gov/forecasts/aeo/pdf/0383(2013).pdf. Accessed 19 Nov 2013
National Highway Traffic Safety Administration (2013) Preliminary statement of policy concerning automated vehicles. http://www.nhtsa.gov/staticfiles/rulemaking/pdf/Automated_Vehicles_Policy.pdf. Accessed 11/19/2013
Bullis K (2011) How vehicle automation will cut fuel consumption. MIT Technology Review, Oct 2011. http://www.technologyreview.com/news/425850/how-vehicle-automation-will-cut-fuel-consumption/. Accessed 19 Nov 2013
Ahn K, Rakha HA, Park S (2012) ECO-Drive application: algorithmic development and preliminary testing. Transportation Research Record: Journal of the Transportation Research Board, No. 2341. Transportation Research Board of the National Academies, Washington DC, pp 1–11
Research and Innovative Technology Administration, study of ITS applications for the environment. Navigation systems with eco-routing features can improve fuel economy by 15 percent. http://www.itsbenefits.its.dot.gov/ITS/benecost.nsf/ID/3EE078DF857F563585257A71006A5790. Accessed 19 Nov 2013
Annual Energy Review 2011 (2012) Publication DOE/EIA-0384(2011). US Energy Information Administration. http://www.eia.gov/totalenergy/data/annual/pdf/aer.pdf. Accessed 19 Nov 2013
Gonder J, Earleywine M, Sparks W (2012) Analyzing vehicle fuel saving opportunities through intelligent driver feedback. SAE Int J Passeng Cars Electron Electr Syst 5(2): 450–461. http://dx.doi.org/10.4271/2012-01-0494
Driving More Efficiently (2013) Office of Transportation and Air Quality, US Department of Energy. http://fueleconomy.gov/feg/driveHabits.shtml. Accessed 19 Nov 2013
Guo L, Huang S, Sadek AW (2013) An evaluation of likely environmental benefits of a time-dependent green routing system in the Greater Buffalo-Niagara region. J Intell Transp Syst Technol Plann Oper 17(1). doi:10.1080/15472450.2012.704336
Wood E, Gonder J, Rajagopalan S (2013) Connectivity-enhanced route selection and adaptive control for the Chevrolet Volt. In: Proceedings of the October 2013 SAE Energy Management Symposium. National Renewable Energy Laboratory report no. PR-5400-60543. http://www.nrel.gov/docs/fy14osti/60543.pdf. Accessed 19 Nov 2013
Santos A, McGuckin N, Nakamoto HY, Gray D, Liss S (2011) Summary of travel trends: 2009. National highway transportation survey. Publication FHWA-PL-11-022. Federal Highway Administration, US Department of Transportation. http://nhts.ornl.gov/2009/pub/stt.pdf. Accessed 19 Nov 2013
Bureau of Transportation Statistics (2003) Freedom to travel. Publication #BTS03-08. US Department of Transportation Research and Innovative Technology Administration. http://www.rita.dot.gov/bts/sites/rita.dot.gov.bts/files/publications/freedom_to_travel/index.html. Accessed 19 Nov 2013
Census 2000 Summary File. http://www.census.gov/census2000/sumfile1.html. Accessed 19 Nov 2013
Li Z, Chitturi MV, Zheng D, Bill AR, Noyce DA (2013) A next-generation intersection control algorithm for autonomous vehicles. Paper number 13-2185 TRB 92nd annual meeting in Washington, DC, 13–17 Jan
European Transport Safety Council (2008) German Autobahn: The speed limit debate. Speed Fact Sheet 1, February 2008. 6 p. http://www.etsc.eu/documents/copy_of_Speed%20Fact%20Sheet%201.pdf. Accessed 19 Nov 2013
Thomas J, Hwang H, West B, Huff S (2013) Predicting light-duty vehicle fuel economy as a function of highway speed. SAE Int J Passeng Cars Mech Syst 6(2):859–875. doi:10.4271/2013-01-1113. 2013. http://papers.sae.org/2013-01-1113/
Schafer A, Heywood JB, Jacoby HD, Waitz IA (2009) Transportation in a climate-constrained world. MIT Press, Cambridge, MA. https://mitp-web2.mit.edu/sites/default/files/titles/content/9780262512343_sch_0001.pdf. Accessed 19 Nov 2013
Burns LD, Jordan WC, Scarborough BA (2013) Transforming personal mobility. The Earth Institute, Columbia University. http://sustainablemobility.ei.columbia.edu/files/2012/12/Transforming-Personal-Mobility-Jan-27-20132.pdf. Accessed 19 Nov 2013
Report on the First Quadrennial Technology Review (2011) US Department of Energy http://energy.gov/sites/prod/files/QTR_report.pdf. Accessed 19 Nov 2013
US Environmental Protection Agency (2013) Light-duty automotive technology, carbon dioxide emissions, and fuel economy trends: 1975 through 2012. Transportation and Climate Division, Office of Transportation and Air Quality. EPA-420-R-13-001. http://www.epa.gov/fueleconomy/fetrends/1975-2012/420r13001.pdf. Accessed 19 Nov 2013
Brooker A, Ward DJ, Wang L (2013) Lightweighting impacts on fuel economy, cost, and component losses. SAE technical papers presented at the SAE 2013 World Congress and Exhibition, Society of Automotive Engineers, Detroit, Michigan. Warrendale, PA, p 10; National Renewable Energy Laboratory, Golden, CO. Report No. CP-5400-60307. http://dx.doi.org/10.4271/2013-01-0381. 16 Apr 2013
Davis SC, Diegel SW, Boundy RG (2013) Transportation energy data book. Chapter 4 Light-duty vehicles, Edition 32. Produced by Oak Ridge National Laboratory for the US Department of Energy. July 2013. http://cta.ornl.gov/data/index.shtml. Accessed 19 Nov 2013
Atiyeh C (2013) Most fuel-efficient cars: 1993–2013. MSN Autos http://editorial.autos.msn.com/most-fuel-efficient-cars-1993-to-2013-1#1. Accessed 19 Nov 2013
Schrank D, Eisele B, Lomax T (undated) 2012 Annual urban mobility report. Texas A & M Transportation Institute. http://mobility.tamu.edu/ums/. Accessed 19 Nov 2013
Porter CD, Brown A, DeFlorio J, McKenzie E, Tao W, Vimmerstedt L (2013) Effects of travel reduction and efficient driving on transportation: Energy use and greenhouse gas emissions. Transportation energy futures series. Prepared by the National Renewable Energy Laboratory (Golden, CO) and Cambridge Systematics, Inc. for the US Department of Energy, Washington, DC. DOE/GO-102013-3704, p 98. http://www.nrel.gov/docs/fy13osti/55635.pdf. Accessed 19 Nov 2013
Krumm J (2012) How people use their vehicles: statistics from the 2009 National Household Travel Survey. SAE Technical Paper 2012-01-0489. doi:10.4271/2012-01-0489
Acknowledgments
We would like to thank Paul Leiby, Don Mackenzie, Zia Wadud, Bill Morrow, Andrew Sturges, Jake Ward, and Levi Tillemann for helpful feedback on earlier versions of this analysis.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2014 Springer International Publishing Switzerland
About this chapter
Cite this chapter
Brown, A., Gonder, J., Repac, B. (2014). An Analysis of Possible Energy Impacts of Automated Vehicles. In: Meyer, G., Beiker, S. (eds) Road Vehicle Automation. Lecture Notes in Mobility. Springer, Cham. https://doi.org/10.1007/978-3-319-05990-7_13
Download citation
DOI: https://doi.org/10.1007/978-3-319-05990-7_13
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-05989-1
Online ISBN: 978-3-319-05990-7
eBook Packages: EngineeringEngineering (R0)