
Abstract
Collagen is the most abundant protein in mammals and is the major component of load-bearing tissues including tendons, ligaments, cartilage, and others. The mechanical behavior of collagenous tissues depends on the relative collagen content and its organization. Fiber orientation plays a crucial role in the mechanical behavior of these tissues. Several mechanical properties such as anisotropy and Poisson’s ratio are mostly determined by fiber organization. Additionally, mechanical models that include fiber orientation distributions better predict the mechanical behavior of collagenous tissues. Dr. Lanir proposed a pioneering formulation to model the mechanics of collagenous tissues that includes fiber nonlinearity, buckling, and distributed orientations. This formulation had been used to model a variety of tissues and is considered the gold standard for the analysis of distributed fibers. The objective of this chapter is to describe the methods to analyze the mechanical behavior of tissues with fiber orientation distributions. This chapter includes methods to measure fiber orientation, a detailed description of Lanir’s formulation, simplified versions of Lanir’s approach, and applications to several collagenous tissues.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others


Keywords
These keywords were added by machine and not by the authors. This process is experimental and the keywords may be updated as the learning algorithm improves.
2.1 Introduction
Collagen is the most abundant protein in mammals and is the major component of load-bearing tissues including tendons, ligaments, cartilage, disc, skin, arteries, and valves (Fratzl 2008). The fibrillar collagens, particularly types I, II, and III are Please check if the edit made in sentence "The fibrillar collagens, particularly types I, II, …" is appropriate. primarily present in these tissues that are responsible for mechanical load transmission (Hulmes 2008). These load-bearing tissues are also composed of other structural proteins such as elastin and proteoglycans. The mechanical behavior of collagenous tissues depends on the relative collagen content and its organization. Fiber orientation plays a crucial role in the mechanical behavior of these tissues. For example, tendons and ligaments are largely composed of collagen type I, and collagen fibers have a preferred orientation in the direction where load is transmitted. Conversely, tissues loaded in multiple directions, such as the annulus fibrosus of the intervertebral disc or the adventitia of arteries, have two or more preferred fiber orientations. The degree of anisotropy and both the modulus and Poisson’s ratio are influenced by the fiber organization (Ateshian et al. 2009).
Mechanical models of collagenous tissues explicitly consider fibers as one of their main components. For simplicity, fibers are often considered to be aligned. However, several studies have shown that mechanical models that include the orientation distribution of fibers better describe the experimental mechanical behavior (Ateshian et al. 2009; Gasser et al. 2006; Sacks 2003; Federico and Herzog 2008). For instance, a model of articular cartilage that considers fiber orientation distribution is able to predict several experimental observations such as tension-compression nonlinearity, high Poisson’s ratio in tension, and stiffening after proteoglycan depletion (Ateshian et al. 2009). Therefore, modeling the fiber orientation distribution is crucial for the accurate prediction of the mechanical behavior of collagenous tissues.
The objective of this chapter is to describe the methods to analyze the mechanical behavior of collagenous tissues with fiber orientation distributions. Techniques to measure fiber orientation distributions are presented in Sect. 2.2. Two approaches to model the mechanical behavior of fibers with distributed orientations, Angular Integration and Structural Tensors, are presented in Sect. 2.3. Lanir proposed one of these methods, Angular Integration, in 1983 and it is still considered the gold standard formulation for the mechanics of distributed fibers. The other method to analyze fiber distributions, Structural Tensors, is a simplification of Lanir’s formulation that is numerically more efficient. A brief comparison between those approaches is also presented. To show the advantages of considering fiber orientation distributions, applications of these modeling approaches to different tissues are presented in Sect. 2.4. Finally, concluding remarks are presented in Sect. 2.5.
2.2 Experimental Measurements of Fiber Orientation Distribution
The mechanical behavior of collagenous tissues is greatly influenced by the collagen fiber organization. Fiber orientation is a structural parameter that defines the anisotropy of the tissue. For instance, the modulus of tendons is greater in the direction of the fibers than in the transverse direction. For some collagenous tissues, such as Achilles tendon, the orientation of the fibers is predominantly in one direction. These tissues can be accurately modeled using a fiber population with a single orientation. However, collagen fibers in tissues such arteries, mitral valve, and articular cartilage have a wide range of fiber orientations. To accurately model the mechanical behavior of these tissues is important to consider the distribution of fiber orientation. In this section, methods to measure fiber orientation distributions are discussed.
2.2.1 Small Angle Light Scattering
Small angle light scattering (SALS) is an optical technique where a laser light is passed through a thin specimen and a portion of the incident light is scattered due to different refraction indices of the fibers and the surrounding matrix (Sacks and Chuong 1992). The scattered pattern is measured by rotating a linear array of photo-detectors around the optical axis. The pattern is related to the 2D Fourier transformation of the transmitted light (Yang et al. 1987). The general features of a typical SALS scattered pattern are shown using a surface plot when the height represents the intensity of transmitted light (Fig. 2.1a). The contour plot (Fig. 2.1b) shows two preferred directions for this example. Since light scatters in a direction perpendicular to the long axis of a fiber, there is a 90° shift between the scattered light and the fiber orientation. A plot of the angular distribution of light intensities also shows two preferred orientations (Fig. 2.1c). From this plot the main fiber orientations, the spread of the fiber orientation distribution (e.g., variance), and the volume fraction of fibers can be obtained. The preferred orientation is obtained by locating the angle where light intensity reaches a maximum. The variance can be obtained by fitting a distribution function to each of the fiber populations. Finally, the volume fraction of each fiber population can be calculated as the ratio of the area under the distribution function to the total area of the scan. This technique has been applied to pericardium (Sacks 2003), aortic valves (Billiar and Sacks 2000), and other tissues (Sacks and Chuong 1992; Gilbert et al. 2008; Waldman et al. 1999).

Features of a typical small angle light scattering (SALS) experiment. (a) Surface plot shows the intensity of scattered laser light; (b) a contour plot reveals preferred fiber directions. (c) Fiber-orientation parameters can be calculated by fitting distribution functions to the angular distribution of light intensity. Adapted from Sacks and Chuong (1992)
2.2.2 Quantitative Polarized Light
This technique uses the birefringence properties of collagen fibers to determine their orientation. In this method, a rotating linear polarizing film, the sample, and a circular polarizing analyzer (a combination of quarter wave and linear polarizing filters) are placed in-between a light source and a CCD camera (Fig. 2.2). When an isotropic sample is tested, rotation of the linear polarizer results in a constant nonzero intensity beam. However in an anisotropic fibrous tissue, the polarized beam is split into two, one faster than the other, resulting in an elliptically polarized beam. If the polarization axis of the beam is rotated, a sinusoidal variation of the intensity is recorded. The oscillation’s phase and amplitude are related to the sample’s alignment and retardation, respectively. Since a phase value can be measured per pixel, a fiber orientation map can be calculated for the sample (Tower et al. 2002). This technique has several advantages: the components are inexpensive and the data can be acquired fast enough to measure in real-time fiber realignment during a mechanical test. Additionally, the entire sample can be imaged at once. This technique has been applied to supraspinatus tendon (Lake et al. 2009), facet capsule ligament (Quinn et al. 2010; Quinn and Winkelstein 2011), and collagen gels (Lake et al. 2011; Lake and Barocas 2011; Raghupathy et al. 2011).

Quantitative polarized light-mechanical testing system. (a) Imaging and testing setup (adapted from Tower et al. (2002)), (b) Orientation map on a supraspinatus tendon sample, (c) normalized histogram of fiber orientations calculated from the orientation map shown in (b)
2.2.3 Fast Fourier Transformation
This method calculates the distribution of fiber orientations by applying a fast Fourier transformation (FFT) to an optical image illustrating the fiber population of the tissue. The rationale behind this technique is that in an image of perfectly aligned fibers the spatial variation (frequency) of the image intensity is higher in the perpendicular direction than along the fiber. Consequently, a 2D FFT of this image will easily identify the orientation of the maximum frequency and this will correspond to the direction perpendicular to the fibers. In an image of a tissue with distributed fibers, the power spectrum of a 2D FFT converts this image into a 2D map where, at each pixel, the intensity represents the amplitude of the intensity variation; the frequency is represented by the distance from the origin; and the direction represents the orientation in the original image (Fig. 2.3). A discrete orientation distribution can be calculated from the power spectrum by summing the pixel intensities along the radii of the power spectrum. A continuous orientation distribution function can be obtained by fitting the normalized discrete orientation distribution with a continuous probability function. Since this technique can be applied to images obtained from a variety of imaging modalities, it has been applied to variety of tissues including human annulus fibrosus (Guerin and Elliott 2006), chordae tendineae (Vidal Bde and Mello 2009), and electrospun scaffolds (Ayres et al. 2006, 2008).

SEM Image (a), power spectrum (rotated 90°) (b), and discrete orientation distribution for an electrospun scaffold (c). (Adapted from Ayres et al. (2006))
2.2.4 Second-Harmonic-Generation
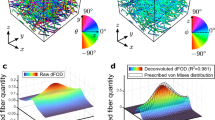
Second harmonic generation is a nonlinear effect where the light scattered by a material with non-centrosymmetric structural features has a component with twice the frequency (second harmonic) (Stoller et al. 2002; Chang and Deng 2010). This phenomenon was first recognized in crystals by Franken et al. (1961) shortly after the demonstration of laser. Since collagen molecules are organized naturally into structures with a lack of center of inversion symmetry, they are able to generate second harmonic light (Fine and Hansen 1971). By rotating the polarization axis of the incident beam, the amplitude and phase of the modulated fundamental and harmonic signals are recorded. The information about fiber orientation is contained in the phase of these signals. The preferred fiber orientation at a specific point is calculated using this technique. By scanning the sample a spatial map of fibers orientations can be obtained. A histogram of fiber orientations shows the overall fiber distribution of the scanned area (Fig. 2.4). This technique has been applied to a variety of tissues such as rat tail tendon, bovine fascia, porcine cornea, and human intervertebral disc (Stoller et al. 2002; Chang and Deng 2010; Fine and Hansen 1971).

(a) Light micrograph of a small region of intervertebral disc showing two different regions of fiber orientation. (b) Orientation image of approximately the same region. (c) Histogram showing the frequency of fiber orientation in the intervertebral disc (b). Adapted from Stoller et al. (2002)
2.2.5 Magnetic Resonance Imaging
Two MRI methods have been used to quantify fiber orientation: Diffusion Tensor Imaging (DTI) and 1H NMR of multipolar spin states. Both techniques are based on the fact that motion of hydrogen atoms (1H spin) of water molecules in the vicinity of collagen fibrils is anisotropic and has a preferred direction along the collagen molecule. In DTI, the fiber orientation can be determined by direction with maximum flow rate (Merboldt et al. 1985). In 1H NMR of multipolar spin states, the distribution of the orientation of collagen fibrils can be estimated by measuring the anisotropy of a spin property called residual dipolar coupling (Berendsen 1962; Fechete et al. 2003). These techniques have been used to measure the distribution of fibril orientations in tendons (Fechete et al. 2003) and cartilage (de Visser et al. 2008; Deng et al. 2007; Pierce et al. 2010; Raya et al. 2011).
2.2.6 Continuous Functions of Fiber Orientation Distribution
Once the fiber orientation is experimentally measured, it can be used directly in a model (see next section) or more often, the fiber orientation distribution is described as continuous functions of the fiber angle. Probability functions are commonly used since they represent the spread (variance) of fiber orientation around one or several preferred orientation without changing the “amount” of fibers, i.e., the integration of the area under curve over the entire range is always a constant value. This is important to uncouple the anisotropy of the fiber distribution and the stiffness of the fiber population (this will be discussed in more detail in the next section).
The distribution functions can be divided in planar (2D), transversely isotropic (3D) and orthotropic (3D) distributions. Planar distributions are used when the majority of the fibers lay in a single plane, e.g., bovine pericardium (Sacks 2003) and supraspinatus tendon (Lake et al. 2009). Normal and von Mises distribution have been used to represent planar distributions with a single preferred orientation (Bischoff 2006; Holzapfel and Ogden 2010) ((2.1) and (2.2), respectively):
where R(θ) is the fiber density function, μ is the preferred fiber orientation, σ is the standard deviation of the distribution, I 0 is first-kind zeroth-order Bessel function, and b is a parameter related to the circular variance as follows:
where I 0 and I 1 are Bessel functions of first kind of zeroth and first order, respectively. Other distribution functions have been proposed to represent fiber distribution with two preferred fiber orientations (bimodal distribution) (Bischoff 2006):
This distribution is symmetric about θ = 0°, the means of the two modes are ±μ and each mode has a standard deviation σ. A transversely isotropic distribution is a 3D distribution which is symmetric around the axis of the mean fiber orientation. This type of distributions have been applied to describe the fiber distribution in the arterial wall (Gasser et al. 2006), aortic heart valves (Freed et al. 2005), and supraspinatus tendons (Thomopoulos et al. 2006). Gasser et al. (2006) proposed a transversely isotropic function that can be interpreted as the axis-symmetric version of the von Mises distribution:
where b is a concentration parameter associated with the von Mises distribution, erfi(x) = −i × erf(x) denotes the imaginary error function, and θ is the “nutation” angle around the axis of symmetry. An ellipsoidal distribution has been used to describe orthotropic symmetries (Ateshian et al. 2009; Nagel and Kelly 2012):
where θ and φ are Eulerian angles, ξ 1, ξ 2, and ξ 3 are the semi-axes of the ellipsoid, and
2.3 Modeling Fiber Mechanics Using a Continuous Distribution of Fiber Orientation
Collagenous tissues are often modeled as a fiber-reinforced composite material (Spencer 1984). In this approach, the tissue is analyzed as a mixture of matrix and fibers, where the matrix represents the non-fibrillar components. In these models, the matrix is usually considered isotropic and the anisotropy of the tissue is characterized by the fiber orientation. For instance, tendons and ligaments are usually modeled using fibers aligned in a single orientation; therefore, the stiffness along the fibers is much higher than the transverse direction (Lanir 1978). Another important characteristic of collagen fibers is that they confer the nonlinearity of the tissue via fiber crimping and buckling. Collagen fibers have different degree of waviness (crimping). Therefore, when load is applied to the tissue, not all fibers are stretched simultaneously. Instead, fibers are progressively recruited increasing the stiffness of the tissue with deformation (Lanir 1978, 1983; Comninou and Yannas 1976; Diamant et al. 1972). The other mechanism by which fibers contribute to the nonlinearity of the tissue is fiber buckling. Due to their high slenderness ratio, fibers buckle at negligible compressive forces (Holzapfel et al. 2004). Thus, collagenous tissues exhibit direction-dependent tension-compression nonlinearity (Soltz and Ateshian 2000). The significant influence of the orientation of collagen fibers on the mechanical behavior of the tissue demands a careful consideration of the orientation distribution for the accurate modeling of collagenous tissues. In the pioneering work of Lanir, a formulation, based on angular integrals, was proposed to include fiber nonlinearity, buckling, and distributed orientations. These integrals represent the addition of the contribution of infinitesimal fractions of fibers oriented in a given direction. This section describes Lanir’s Angular Integration formulation and subsequent simplifications for applications to various tissues.
2.3.1 Angular Integration
In Lanir’s formulation (Lanir 1983), Angular Integration, the fiber distribution was described by a spatial density distribution function, which quantifies the volumetric fraction of fibers oriented in a particular direction. The total strain energy and stresses were calculated as the integration of the energy and stresses of fibers in all directions. This general formulation was later simplified for the case of planar tissues under biaxial testing (Lanir et al. 1996). Similar approaches were presented by (Ateshian et al. 2009; Sacks 2003; Billiar and Sacks 2000; Girard et al. 2009; Nguyen et al. 2008). In general, the strain energy (Ψ) and the second Piola–Kirchhoff stress tensor (S f) for a family of distributed fibers can be expressed as
where λ is the stretch of a fiber, \( \overline{\varPsi} \) is the strain energy of a fiber, C is the right Green-Cauchy strain tensor. In (2.8) and (2.9), it is assumed that the fiber will buckle under any compressive deformation; therefore, \( \overline{\varPsi}\left(\uplambda \right)=0 \) and \( \partial \overline{\varPsi}\left(\uplambda \right)/\partial \mathbf{C}=0 \) for \( \lambda \le 1.0 \). The partial derivative in (2.8) can be rewritten using the chain rule as
where M is a unit vector representing the average direction of an infinitesimal fraction of fibers, and the stretch, in the direction M, is related to the strain tensor by \( {\lambda}^2=\mathbf{C}:\mathbf{M}\otimes \mathbf{M} \). Therefore, (2.9) can be rewritten as
Equation (2.11) is valid for a general 3D fiber distribution. However, it can be simplified for the case of planar fiber distributions as
Although (2.12) has been solved for a particular choice of R(θ) and \( \overline{\varPsi} \) (Raghupathy and Barocas 2009), in general, it is very difficult to obtain a closed-form solution; therefore, numerical integration is the usual alternative.
2.3.1.1 Numerical Solution of the Angular Integration Formulation
In this section, some aspects of the numerical solution required for Lanir’s Angular Integration formulation are discussed. Equations (2.8)–(2.12) show that the calculation of the stress and strain energy requires an angular integration. In very few simplified cases the integral can be solved analytically (Raghupathy and Barocas 2009; Cortes et al. 2010). However, in the majority of practical cases a numerical integration must be executed. In the case of planar (2D) distributions, such that of (2.12), a trivial 1D integration is necessary. However, 3D distributions, such as those in (2.5)–(2.7), require an integration over the unit sphere. This integral cannot be solved just by dividing the range of the variables θ and φ in equally spaced segments since there would be an accumulation of integration points around the poles of the unit sphere causing numerical inaccuracies (Fig. 2.5a). Instead, an icosahedron-based method has been used to solve this problem (Ateshian et al. 2009; Nagel and Kelly 2012). In this method, the triangular faces of an icosahedron are divided using equally spaced points and then mapped onto the unit sphere producing a more uniform distribution of the area of surface elements. It was shown that the accuracy of this method can be further improved by rotating the cloud integration points so that one point coincides with the orientation of the peak value of the orientation distribution function (Nagel and Kelly 2012). In this way, the numerical integration method is able to exactly capture the maximum radius of the distribution function independent of the number of elements used to divide the sphere.

Discretization of the unit sphere using (a) equally spaced segments over the range of the variables θ and φ and (b) icosahedron-based method
2.3.2 Generalized Structure Tensors: A simplified Approach for Fiber Distribution
Structure tensors are an alternative approach to formulate the constitutive relations for fiber-reinforced materials. A generalized structure tensor represents the anisotropy of the fiber population and, as shown below, the stress of the fibers is proportional to this tensor. For instance, a material with aligned fibers is represented by a structure tensor defined as the dyadic product \( {\mathbf{a}}_0\otimes {\mathbf{a}}_0 \), where a 0 is a unit vector in the direction of the fibers in the reference configuration. The strain energy of a composite material with aligned fibers can be expressed as a function of the invariants of C and \( {\mathbf{a}}_0\otimes {\mathbf{a}}_0 \):
A general discussion on the use of these invariants and tensors can be found in (Spencer 1984). Recently, Freed et al. (2005) and Gasser et al. (2006) formulated structure tensors which consider the effect of fiber angular distribution. The angular distribution tensor (H) is defined as
Again, (2.14) can be simplified for planar fiber distributions as
The pseudo-invariant \( {\overline{I}}_4=\mathbf{C}:\mathbf{H} \) can be expressed in an integral form, using (2.14),as
A similar expression can be easily obtained for planar distributions. From (2.16), it can be observed that Ī 4 is the weighted average of λ 2. Notice that in the definition of Ī 4, there is not a condition to exclude fibers under compression. Therefore, if one of the principal values of C is lower than 1.0, a fraction of compressed fibers will be included in the average \( {\overline{\lambda}}^2 \). Uniaxial tension, biaxial tension, and simple shear are examples of deformation states for which at least one of the principal values of C is less than one. Consequently, error will be introduced when the structure tensor formulation is considered in these loading scenarios.
For the generalized structural tensor, the strain energy (Ψ f) and the second Piola–Kirchhoff (S f) stress tensor can be expressed as
An important advantage of this approach is that the angular integrals are evaluated just once during the definition of the tensor H. After that, the stresses are obtained by algebraic operations. This is important in numerical methods such as finite elements since the number of calculation is greatly reduced. Notice that the strain energy function and the stresses are calculated using the average stretch rather than the actual stretch in the fibers; therefore, for nonlinear fibers, lower stresses are obtained. In this formulation the buckling condition establishes that the whole fiber distribution is neglected when the mean of stretch is lower than one (Gasser et al. 2006): \( {\varPsi}_{\mathrm{f}}=0 \), \( {\mathbf{S}}_{\mathrm{f}}=\mathbf{0} \) for \( \overline{\lambda}<1.0 \) (or equivalently \( {\overline{I}}_4<1.0 \)). However, since this criterion is based on the average value of the stretch, compressed fibers may be included in the calculation of \( \overline{\lambda} \) when \( \overline{\lambda}>1.0 \); and conversely, fibers in tension may be disregarded when \( \overline{\lambda}<1.0 \). This will cause a difference between the angular integration (Lanir’s formulation) and structure tensors. The differences between these formulations are discussed in the next section.
2.3.3 Comparison Between the Angular Integration and Structure Tensor Approaches
Although the structure tensor approach greatly reduces the amount of calculations in numerical methods such as finite elements, several studies have shown that these methods lead to different results for the same fiber distribution and applied strains (Federico and Herzog 2008; Cortes et al. 2010; Pandolfi and Vasta 2012). In general, the difference between the formulations increases with deformation and the spread of the orientation distribution. In this section, a numerical comparison between the angular integration (Lanir’s formulation) and structure tensors is presented for a von Mises and a transversely isotropic distributions (Cortes et al. 2010). The following popular strain energy has been chosen as a constitutive relation to describe the mechanical behavior of the collagen fibers (Holzapfel et al. 2000)
where c 1 is an elastic constant and c 2 a is non-dimensional parameter associated with the degree of nonlinearity. A single set of material properties is used throughout this section: c 1 = 5 MPa, c 2 = 30. These properties describe the behavior of the supraspinatus tendon (Kadlowec 2009).
The generalized structure tensor associated with the distribution function shown in (2.5) can be expressed as
where \( \kappa =2\pi {\displaystyle {\int}_0^{\pi }R\left(\theta \right){ \sin}^3\theta\;d\theta } \) ranges from 0 to 1/3 for perfectly aligned and isotropic distributed fibers, respectively. An expression similar to (2.20) can be obtained for a von Mises distribution
where H 2, I 2, and \( {\mathbf{a}}_{0_2}\otimes {\mathbf{a}}_{0_2} \) are 2D versions of the tensors shown in (2.20), the distribution parameter is now defined as \( {\kappa}_{2\mathrm{D}}={\displaystyle {\int}_0^{\pi}\rho \left(\theta \right){ \sin}^2\theta\;d\theta } \) and ranges from 0 to 1/2. The parameters κ and κ 2D are associated with the degree of anisotropy of the fiber distribution (Fig. 2.6). For instance, a value of \( \kappa ={\kappa}_{2\mathrm{D}}=0 \) corresponds to aligned fibers, whereas \( {\kappa}_{2\mathrm{D}}=1/2 \) or \( \kappa =1/3 \) correspond to isotropic distributions.

Two loading configurations, typically used to characterize connective tissues, have been selected for comparison: uniaxial and biaxial tension. The tissue is considered as an incompressible material; therefore, the condition \( \det \mathbf{C}=1 \) holds. Thecomparison between the angular integration and structure tensor formulations for planar (2D) and transversely isotropic (3D) distributions under uniaxial tension is shown in Fig. 2.7. It can be observed that the difference between these formulations tends to zero when the fibers are aligned (\( \kappa \to 0 \)). This can be attributed to the reduced number of buckled fibers and that the average fiber stretch is closer to the actual stretch of the fibers. A difference of 10 % in the longitudinal stress is obtained for \( \kappa =0.015 \) (\( {\kappa}_{2\mathrm{D}}=0.022 \)) when a stretch of 1.2 is applied. These values of the distribution parameters κ and κ 2D represent distributions where 95 % of the fibers are oriented within 17° of the mean fiber direction in the reference configuration. This is in agreement with the analysis of Federico and Herzog (2008) who asserted that approximations as those presented in (2.17) and (2.18) are a good approximation of the general case ((2.8) and (2.9)) when there is a weak directional dispersion around the mean direction.

Difference of the second Piola-Kirchhoff stresses in the direction x 1 (S 11) between angular integration and structure tensor formulations increases with the applied stretch (λ 1) and decreases when the fiber distribution (κ for transversely isotropic (3D) and κ2D for planar (2D) distributions) is small. Difference defined as (S AI − S ST)/S AI × 100. Notice that distributions go from perfectly aligned (κ = κ2D = 0) to isotropic (κ = 1/3, κ2D = 1/2). Adapted from Cortes et al. (2010)
For a transversely isotropic distribution, in the equi-biaxial case (λ 1 = λ 2), a fraction of the fibers buckle due to the out-of-plane contraction and therefore do not contribute to total stresses in the tissue. However, in the GST formulation, those fibers are considered in the calculation of the average stretch. To illustrate this, a single fiber of families with transversely isotropic distribution (2.5) under equal-biaxial stretch is analyzed. Figure 2.8 shows the stress difference as a function of fiber distribution for several values of the applied stretch. A 10 % difference is obtained for κ = 0.014 and a stretch equal to 1.2. This value is very close to that obtained for the case of uniaxial tension (Fig. 2.7). The results shown in Figs. 2.8 and 2.9 were confirmed by a subsequent study (Pandolfi and Vasta 2012).

Transversely isotropic (3D) family of fibers shows differences in the second Piola–Kirchhoff stresses (S 11) even for the case equal-biaxial testing. Difference defined as (S AI − S GST)/S AI × 100

Error percentage with respect to the response of the angular integration approach for the generalized structure tensor model (GST) (Gasser et al. 2006) and the fourth order structure tensor model (V, Pandolfi and Vasta 2012) for equi-biaxial deformation. Curves refer to the stretches λ = 1.1 (label 1), λ = 1.15 (label 2), and λ = 1.2 (label 3). Adapted from Pandolfi and Vasta (2012)
To decrease the difference between these formulations, a method that considers second order terms of the pseudo-invariant I 〈4〉 was proposed (Pandolfi and Vasta 2012). The inclusion of the dependence of the second order parameters improves the approximation, still conserving a rather simple formulation that avoids the explicit integration of the stretch in the spatial direction. A Taylor expansion of the Ψ(I 4) around it mean argument Ī 4
where the operator \( \left\langle \cdot \right\rangle \) is defined as \( \left\langle \cdot \right\rangle ={\displaystyle {\int}_0^{2\pi }{\displaystyle {\int}_0^{\pi }R\left(\theta, \varphi \right)\left(\cdot \right) \sin \theta d\theta d\varphi }} \). The first term on the right hand side of (2.22) is equivalent to that proposed by Gasser et al. (2006); the second term is equal to zero since \( \left\langle {I}_4\right\rangle ={\overline{I}}_4 \); and the third term is a correction term proposed by Pandolfi and Vasta (2012), which can be rewritten as:
for the constitutive equation for the fiber shown in (2.19). Here \( \mathrm{\mathbb{H}} = {\mathbf{a}}_0\otimes {\mathbf{a}}_0\otimes {\mathbf{a}}_0\otimes {\mathbf{a}}_0 \) is a fourth order structure tensor. A comparison between angular integration (Lanir’s formulation) and structure tensor formulations (Gasser et al. 2006; Pandolfi and Vasta 2012) for the biaxial case shows a decrease in the difference with respect to angular integration (Fig. 2.9).
2.3.4 Remarks on Modeling Approaches
In this section, the two major approaches, angular integration and structure tensors, used to analyze the mechanical behavior of tissues with distributed fibers were described in detail. The angular integration method (Lanir’s formulation) is considered as the gold standard formulation for the analysis of the mechanics of distributed fibers. It has been successfully used for many applications. However, it requires a numerical integration every time a value of stress is required. Consequently, when this formulation is implemented in numerical tools, such as finite elements, the computation time increases considerably. The icosahedron method used to discretize the unit sphere increases the numerical integration efficiency reducing computational time. The generalized structure tensor formulation was proposed as an alternative to reduce the number of integrals required to calculate fiber stress. However, differences have been reported for some loading cases and orientation distributions when compared to the angular integration approach. Consequently, choosing one method over the other depends on the application at hand. In the following section, some applications of both formulations are described.
2.4 Applications
Several fibrous tissues have been modeled using fiber orientation distributions. Although this approach to model the fibers was first applied by Lanir to tendons and skin (Lanir 1983; Lanir et al. 1996), a great number of studies have analyzed cardiovascular tissues using fiber orientation distributions (Vidal Bde and Mello 2009; Stoller et al. 2002; Freed et al. 2005; Thomopoulos et al. 2006; Holzapfel et al. 2004; Soltz and Ateshian 2000; Lanir et al. 1996). Recently, a few studies have applied orientation distributions to the modeling of other fibrous tissues such as articular cartilage, cornea, and annulus fibrosus (Ateshian et al. 2009; Pandolfi and Holzapfel 2008; Caner et al. 2007). In general, a better prediction of the mechanical behavior of these tissues has been obtained when fiber orientation distributions are considered. Showing each of these cases in detail is out of the scope of this chapter. Instead, we summarize and discuss only those studies where the effect of fiber distribution has been quantified by comparing angular integration, generalized structure tensor, and models without fiber dispersion.
2.4.1 Arteries
The arterial wall is grossly divided in three layers: intima, media, and adventitia. The intimal layer is the thin innermost layer of the arterial wall. It is composed of a layer of endothelial cells, a sub-endothelial layer of loose connective tissue with a large angular deviation, and an elastic layer that separates the intima and the media. The media is the layer of the arterial and is composed of smooth muscle cells, elastin fibers, and collagen fiber bundles. The collagen fibers in the medial layer are highly aligned in the circumferential direction. Finally, the adventitia is the outermost layer and composed mainly of fibroblasts and fibrocytes, collagen fibers and ground matrix. The collagen fibers in the adventitia are arranged in two helical fiber families with significant angular dispersion.
Gasser et al. (2006) modeled the mechanical behavior of the adventitial layer using a model that consisted of an incompressible neo-Hookean matrix reinforced by two families of distributed fibers. The fibers were modeled using the “κ” model with an exponential strain energy shown here in (2.18). The parameters used for the analysis were representative to the human iliac artery: shear modulus of the matrix c = 7.64 kPa, k1 = 996.6 kPa, k2 = 524.6, κ = 0.226, and the angle between the circumferential direction and each of the fiber families as γ = 49.98°. The model was used to describe the response of the adventitial layer for the inflation and uniaxial tests. To analyze the effect of the dispersion parameter κ and the mean fiber angle γ on the mechanical response of the adventitia, simulations with the following parameters were also calculated: γ = 39.98° and 59.98° and κ = 0 and 0.333. Amajor effect of including the fiber orientation distribution is the reduction of the dependence of the response of the tube with the mean fiber angle γ. The simulations also show a stiffening effect on the adventitial tube as the axial and circumferential stretches are reduced when the orientation dispersion increases (Fig. 2.10a). On uniaxial tests in the circumferential and axial directions, an increase on the fiber orientation dispersion decreases the amount of lateral contraction, i.e., apparent Poisson’s ratio (Fig. 2.10b). This indicates that, for aligned fibers, big rotations occur before fibers start taking load.

Effect of fiber distribution on the mechanical behavior of arterial tissue. (a) Simulations of an inflation tests show that the axial stretch is lower for models with distributed fibers (stiffening effect). (b) The lateral contraction (Poisson’s effect) is higher for samples with aligned fibers. Adapted from Gasser et al. (2006)
In summary, the inclusion of fiber distribution using the structure tensor model (Stoller et al. 2002) proposed by Gasser et al. (2006) revealed that characteristics of the mechanical behavior of the human iliac arteries are more consistent with experimental observations than simulations with aligned fibers. In particular, the stiffening effect in the axial direction and elastic properties in the uniaxial behavior of the adventitia layer were captured closely by considering the fiber orientation distribution.
2.4.2 Aortic Valves
Another cardiovascular tissue that has been modeled using fiber angle dispersion is the aortic valve. This valve is located between the left ventricle and the aorta. It is composed of three leavelets that are planar tissues composed of proteoglycans, and fibers of collagen type I and III (Dainese et al. 2006; Eriksen et al. 2006). Billiar and Sacks (2000) measured the fiber orientation using SALS and used a bimodal distribution (Fig. 2.11). Although the fibers of both fiber families contribute to R(θ), Billiar and Sacks (2000) concluded that mechanical contribution of the broader distribution is negligible and the in-plane biaxial response can be modeled using the highly aligned family of fibers. Freed et al. (2005) used a structure tensor approach to improve the computational efficiency compared to the angular integration approach. Additionally, the quality of the curve fit of biaxial tension experiments was evaluated and compared to the angular integration approach.

Representative fiber orientation distribution for an aortic valve leaflet to a dual Gaussian distribution. The distribution was principally composed of a highly aligned population (σ 1 = 16°) and a broader distribution (σ 1 = 44°). Adapted from Billiar and Sacks (2000)
The leaflets of the aortic valve were modeled using the distribution shown in (2.1) and a combination of the three different strain energy functions: dilatational, distortional isotropic, and distortional anisotropic. In this case, the dilatational and distortional isotropic components can be regarded as the ground matrix, and the distortional anisotropic as the fiber component. Angular integration approach and structure tensor formulations were used for the fiber term. It was found that both formulations provided a good fit to the experimental biaxial data (Fig. 2.12). The structure tensor approach slightly under-predicted in the fiber direction and over-predicted in the transverse direction the stiffness at the toe region. These results are in agreement with the comparison between angular integration and structure tensors presented in the previous section. Since only the fiber family with highly aligned fibers contributes to the in-plane mechanics (Billiar and Sacks 2000), the difference between both the formulations should be small (Fig. 2.9).

Curve fitting of the biaxial tension tests. Dots correspond to experimental data, dashed lines correspond to the angular integration formulation, and solid lines to the structure tensor approach. Protocols 2–6 correspond to tension ratio Circumferential:Radial = 30:60 (N/m). Adapted from Freed et al. (2005)
2.4.3 Articular Cartilage
Articular cartilage is mostly composed of proteoglycans and collagen type II. Collagen fibers in articular cartilage have a characteristic orientation distribution that goes from radially aligned at the insertion in the subchondral bone, randomly oriented in the middle zone and aligned parallel to the surface. Articular cartilage has a complex mechanical behavior that includes tension compression nonlinearity (Soltz and Ateshian 2000); high Poisson’s ratios in tension and the opposite in compression (Elliott et al. 2002); and stiffening of glycosaminoglycan digested samples (Schmidt et al. 1990). A model consisting of osmotic pressure (representing the matrix) and a distributed fiber family (as that of (2.6)) is able to replicate these experimental observations (Ateshian et al. 2009). Most of these could not be obtained from constitutive models which use a discrete number of aligned fiber populations.
2.4.4 Annulus Fibrosus
The use of fiber orientation distributions in the annulus fibrosus has not been as common as for other tissues. However, two studies show the importance of the orientation dispersion in the mechanical behavior of the annulus fibrosus (Caner et al. 2007; Guo et al. 2012). Annulus fibrosus is a tissue which is composed of concentric lamellae with alternating mean fiber angles. It has been typically modeled as an isotropic matrix reinforced with two aligned fiber families. However, a material model composed of matrix and fibers is not enough to describe the multiaxial mechanical behavior of the annulus fibrosus (Guerin and Elliott 2006; Guo et al. 2012; Wagner and Lotz 2004; O’Connell et al. 2009). Specifically, uniaxial and biaxial experiments demonstrate that the stiffness of the matrix increases with fiber stretch (Guo et al. 2012). Therefore, several studies have included strain energy terms representing fiber–matrix interactions to improve model predictions. However, these fiber–matrix interactions may be artificial concepts to quantify the real strain energy from homogeneous macro-scale deformations (Guo et al. 2012).
Caner et al. (2007) proposed a model which included a fiber orientation distribution and proposed that the stiffening effect associated with fiber distributions could describe the mechanics of annulus fibrous without explicitly including fiber–matrix interactions. The transversely isotropic fiber orientation distribution was described by the function:
where c 1 and c 2 were assumed as 18.5 and −60, respectively. The model parameters were obtained by curve fitting of uniaxial tests of Acaroglu et al. (1995), Skaggs et al. (1994), Wu and Yao (1976), and Elliott and Setton (2001). The predictions of the model with fiber distribution were also compared to models with aligned fibers and aligned fibers with explicit fiber–matrix interactions.
All models were able to describe the uniaxial tension behavior in the fiber direction (Fig. 2.13a). For the aligned without fiber–matrix interaction, all model parameters were obtained from this experiment. Tension in the circumferential direction was used to obtain the remainder of the model parameters for the model with aligned fibers and fiber–matrix interaction and the fiber distribution model. Prediction of the change in fiber angle and lateral stretch in uniaxial tension in the circumferential direction show the good agreement between experimental measurements and the models with fiber–matrix interaction and fiber distribution. Additionally, the model with distributed fibers was able to predict the lateral stretch in the uniaxial test in the circumferential direction (Fig. 2.13b). This comparison shows that the fiber distribution can explain the discrepancies observed in the predictions of models that only include aligned fibers and matrix. Additionally, the response of the models with fiber–matrix interaction and fiber distribution was very similar suggesting that the “apparent” shear fiber–matrix interaction can be explained by including the fiber orientation distribution in the model. Whether or not the annulus fibrosus fiber distribution as suggested by the model is physically present within the tissue structure has not yet been determined.

Comparison of the ability of predicting the uniaxial mechanical behavior of annulus fibrosus of three models: aligned fibers without shear fiber–matrix interaction, aligned fibers with shear fiber–matrix interaction, and including fiber distribution (microplane). Adapted from Caner et al. (2007)
2.5 Conclusions
In this chapter, several methods to measure fiber orientation distribution were described. All the experimental methods presented here used different approaches; however, they all have a common output: a fiber distribution histogram. The choice of a particular method depends on the application: real-time acquisition, micro/macroscopic scale, and shape of the sample, just to mention few. For simplicity, a continuous distribution function can be curve-fitted to the experimental distribution, but this is not a requirement, the formulation can use both types of distributions since there are no restrictions on their shape.
Two approaches to model the mechanical behavior of distributed fibers were presented in this chapter: Angular Integration and Structure Tensors. The angular integration approach, proposed by Lanir in 1983, adds the contribution of fiber at different orientations, excluding fibers undergoing compression. This approach is considered the gold standard formulation to describe the mechanics of distributed fibers. An alternative approach, generalized structure tensors, simplifies the angular integration formulation by defining a tensor that represents the spatial organization of the fibers. Once the structure tensor is defined, stress can be calculated just using algebraic operation. Consequently, the number of integrals required in a numerical method such as finite elements is drastically reduced. However, some differences compared to the angular integration approach have been reported for specific distributions and loading cases. Applications of both approaches show the importance of including the angular distribution in the modeling of collagenous tissues. Models that include distributed fiber orientations were able to describe several key experimental observations that models considering aligned fibers cannot predict.
References
Acaroglu ER, Iatridis JC, Setton LA, et al. Degeneration and aging affect the tensile behavior of human lumbar anulus fibrosus. Spine. 1995;20:2690–701.
Ateshian GA, Rajan V, Chahine NO, et al. Modeling the matrix of articular cartilage using a continuous fiber angular distribution predicts many observed phenomena. J Biomech Eng. 2009;131:061003. doi:10.1115/1.3118773.
Ayres C, Bowlin GL, Henderson SC, et al. Modulation of anisotropy in electrospun tissue-engineering scaffolds: analysis of fiber alignment by the fast Fourier transform. Biomaterials. 2006;27:5524–34. doi:10.1016/j.biomaterials.2006.06.014.
Ayres CE, Jha BS, Meredith H, et al. Measuring fiber alignment in electrospun scaffolds: a user’s guide to the 2D fast Fourier transform approach. J Biomater Sci Polym Ed. 2008;19:603–21. doi:10.1163/156856208784089643.
Berendsen H. Nuclear magnetic resonance study of collagen hydration. J Chem Phys. 1962;36:3297–305. doi:10.1063/1.1732460.
Billiar K, Sacks M. Biaxial mechanical properties of the native and glutaraldehyde-treated aortic valve cusp: part II—a structural constitutive model. J Biomech Eng. 2000;122:327–35. doi:10.1115/1.1287158.
Bischoff J. Continuous versus discrete (invariant) representations of fibrous structure for modeling non-linear anisotropic soft tissue behavior. Int J Non-Linear Mech. 2006;41:167–79. doi:10.1016/j.ijnonlinmec.2005.06.008.
Caner FC, Guo Z, Moran B, et al. Hyperelastic anisotropic microplane constitutive model for annulus fibrosus. J Biomech Eng. 2007;129:632–41. doi:10.1115/1.2768378.
Chang Y, Deng X. Characterization of excitation beam on second-harmonic generation in fibrillous type I collagen. J Biol Phys. 2010;36:365–83. doi:10.1007/s10867-010-9190-8.
Comninou M, Yannas IV. Dependence of stress-strain nonlinearity of connective tissues on the geometry of collagen fibers. J Biomech. 1976;9:427–33.
Cortes DH, Lake SP, Kadlowec JA, et al. Characterizing the mechanical contribution of fiber angular distribution in connective tissue: comparison of two modeling approaches. Biomech Model Mechanobiol. 2010;9:651–8. doi:10.1007/s10237-010-0194-x.
Dainese L, Barili F, Topkara VK, et al. Effect of cryopreservation techniques on aortic valve glycosaminoglycans. Artif Organs. 2006;30:259–64. doi:10.1111/j.1525-1594.2006.00213.x.
de Visser SK, Bowden JC, Wentrup-Byrne E, et al. Anisotropy of collagen fibre alignment in bovine cartilage: comparison of polarised light microscopy and spatially resolved diffusion-tensor measurements. Osteoarthritis Cartilage. 2008;16:689–97. doi:10.1016/j.joca.2007.09.015.
Deng X, Farley M, Nieminen MT, et al. Diffusion tensor imaging of native and degenerated human articular cartilage. Magn Reson Imaging. 2007;25:168–71. doi:10.1016/j.mri.2006.10.015.
Diamant J, Keller A, Baer E, et al. Collagen; ultrastructure and its relation to mechanical properties as a function of ageing. Proc R Soc Lond B Biol Sci. 1972;180:293–315.
Elliott DM, Setton LA. Anisotropic and inhomogeneous tensile behavior of the human anulus fibrosus: experimental measurement and material model predictions. J Biomech Eng. 2001;123:256–63.
Elliott DM, Narmoneva DA, Setton LA. Direct measurement of the Poisson’s ratio of human patella cartilage in tension. J Biomech Eng. 2002;124:223–8.
Eriksen HA, Satta J, Risteli J, et al. Type I and type III collagen synthesis and composition in the valve matrix in aortic valve stenosis. Atherosclerosis. 2006;189:91–8. doi:10.1016/j.atherosclerosis.2005.11.034.
Fechete R, Demco D, Blumich B. Order parameters of the orientation distribution of collagen fibers in Achilles tendon by H-1 NMR of multipolar spin states RID C-3671-2011. NMR Biomed. 2003;16:479–83. doi:10.1002/nbm.854.
Federico S, Herzog W. Towards an analytical model of soft biological tissues. J Biomech. 2008;41:3309–13. doi:10.1016/j.jbiomech.2008.05.039.
Fine S, Hansen W. Optical second harmonic generation in biological systems. Appl Opt. 1971;10:23503. doi:10.1364/AO.10.002350.
Franken P, Weinreich G, Peters C, Hill A. Generation of optical harmonics. Phys Rev Lett. 1961;7:118. doi:10.1103/PhysRevLett.7.118.
Fratzl P. Collagen: structure and mechanics, an introduction. In: Fratzl P, editor. Collagen: structure and mechanics. New York: Springer; 2008.
Freed AD, Einstein DR, Vesely I. Invariant formulation for dispersed transverse isotropy in aortic heart valves: an efficient means for modeling fiber splay. Biomech Model Mechanobiol. 2005;4:100–17. doi:10.1007/s10237-005-0069-8.
Gasser TC, Ogden RW, Holzapfel GA. Hyperelastic modelling of arterial layers with distributed collagen fibre orientations. J R Soc Interface. 2006;3:15–35. doi:10.1098/rsif.2005.0073.
Gilbert TW, Wognum S, Joyce EM, et al. Collagen fiber alignment and biaxial mechanical behavior of porcine urinary bladder derived extracellular matrix. Biomaterials. 2008;29: 4775–82. doi:10.1016/j.biomaterials.2008.08.022.
Girard MJA, Downs JC, Burgoyne CF, Suh J-KF. Peripapillary and posterior scleral mechanics—part I: development of an anisotropic hyperelastic constitutive model. J Biomech Eng. 2009;131(5):051011.
Guerin HAL, Elliott DM. Degeneration affects the fiber reorientation of human annulus fibrosus under tensile load. J Biomech. 2006;39:1410–8. doi:10.1016/j.jbiomech.2005.04.007.
Guo Z, Shi X, Peng X, Caner F. Fibre-matrix interaction in the human annulus fibrosus. J Mech Behav Biomed Mater. 2012;5:193–205. doi:10.1016/j.jmbbm.2011.05.041.
Holzapfel GA, Ogden RW. Constitutive modelling of arteries. Proc R Soc A Math Phys Eng Sci. 2010;466:1551–96. doi:10.1098/rspa.2010.0058.
Holzapfel G, Gasser T, Ogden R. A new constitutive framework for arterial wall mechanics and a comparative study of material models RID B-3906-2008. J Elast. 2000;61:1–48. doi:10.1023/A:1010835316564.
Holzapfel G, Gasser T, Ogden R. Comparison of a multi-layer structural model for arterial walls with a fung-type model, and issues of material stability RID B-3906-2008. J Biomech Eng. 2004;126:264–75. doi:10.1115/1.1695572.
Hulmes D. Collagen diversity, synthesis and assembly (Chapter 2). In: Fratzl P, editor. Collagen: structure and mechanics. New York: Springer; 2008.
Kadlowec JA. A hyperelastic model with distributed fibers to describe the human supraspinatus tendon tensile mechanics; 2009.
Lake SP, Barocas VH. Mechanical and structural contribution of non-fibrillar matrix in uniaxial tension: a collagen-agarose co-gel model. Ann Biomed Eng. 2011;39:1891–903. doi:10.1007/s10439-011-0298-1.
Lake SP, Miller KS, Elliott DM, Soslowsky LJ. Effect of fiber distribution and realignment on the nonlinear and inhomogeneous mechanical properties of human supraspinatus tendon under longitudinal tensile loading. J Orthop Res. 2009;27:1596–602. doi:10.1002/jor.20938.
Lake SP, Hald ES, Barocas VH. Collagen-agarose co-gels as a model for collagen-matrix interaction in soft tissues subjected to indentation. J Biomed Mater Res A. 2011;99A:507–15. doi:10.1002/jbm.a.33183.
Lanir Y. Structure-strength relations in mammalian tendon. Biophys J. 1978;24:541–54. doi:10.1016/S0006-3495(78)85400-9.
Lanir Y. Constitutive equations for fibrous connective tissues. J Biomech. 1983;16:1–12.
Lanir Y, Lichtenstein O, Imanuel O. Optimal design of biaxial tests for structural material characterization of flat tissues. J Biomech Eng. 1996;118:41–7. doi:10.1115/1.2795944.
Merboldt K-D, Hanicke W, Frahm J. Self-diffusion NMR imaging using stimulated echoes. J Magn Reson. 1985;64:479–86. doi:10.1016/0022-2364(85)90111-8.
Nagel T, Kelly DJ. Apparent behaviour of charged and neutral materials with ellipsoidal fibre distributions and cross-validation of finite element implementations. J Mech Behav Biomed Mater. 2012;9:122–9. doi:10.1016/j.jmbbm.2012.01.006.
Nguyen TD, Jones RE, Boyce BL. A nonlinear anisotropic viscoelastic model for the tensile behavior of the corneal stroma. J Biomech Eng. 2008;130(4):041020. doi:10.1115/1.2947399.
O’Connell GD, Guerin HL, Elliott DM. Theoretical and uniaxial experimental evaluation of human annulus fibrosus degeneration. J Biomech Eng. 2009;131:111007. doi:10.1115/1.3212104.
Pandolfi A, Holzapfel GA. Three-dimensional modeling and computational analysis of the human cornea considering distributed collagen fibril orientations. J Biomech Eng. 2008;130:061006. doi:10.1115/1.2982251.
Pandolfi A, Vasta M. Fiber distributed hyperelastic modeling of biological tissues. Mech Mater. 2012;44:151–62. doi:10.1016/j.mechmat.2011.06.004.
Pierce DM, Trobin W, Raya JG, et al. DT-MRI based computation of collagen fiber deformation in human articular cartilage: a feasibility study. Ann Biomed Eng. 2010;38:2447–63. doi:10.1007/s10439-010-9990-9.
Quinn KP, Winkelstein BA. Preconditioning is correlated with altered collagen fiber alignment in ligament. J Biomech Eng. 2011;133(6):064506. doi:10.1115/1.4004205.
Quinn KP, Bauman JA, Crosby ND, Winkelstein BA. Anomalous fiber realignment during tensile loading of the rat facet capsular ligament identifies mechanically induced damage and physiological dysfunction. J Biomech. 2010;43:1870–5. doi:10.1016/j.jbiomech.2010.03.032.
Raghupathy R, Barocas VH. A closed-form structural model of planar fibrous tissue mechanics. J~Biomech. 2009;42:1424–8. doi:10.1016/j.jbiomech.2009.04.005.
Raghupathy R, Witzenburg C, Lake SP, et al. Identification of regional mechanical anisotropy in soft tissue analogs. J Biomech Eng. 2011;133(9):091011. doi:10.1115/1.4005170.
Raya JG, Melkus G, Adam-Neumair S, et al. Change of diffusion tensor imaging parameters in articular cartilage with progressive proteoglycan extraction. Invest Radiol. 2011;46:401–9. doi:10.1097/RLI.0b013e3182145aa8.
Sacks M. Incorporation of experimentally-derived fiber orientation into a structural constitutive model for planar-collagenous tissues. J Biomech Eng. 2003;125:280–7. doi:10.1115/1.1544508.
Sacks MS, Chuong CJ. Characterization of collagen fiber architecture in the canine diaphragmatic central tendon. J Biomech Eng. 1992;114:183–90.
Schmidt MB, Mow VC, Chun LE, Eyre DR. Effects of proteoglycan extraction on the tensile behavior of articular cartilage. J Orthop Res. 1990;8:353–63. doi:10.1002/jor.1100080307.
Skaggs DL, Weidenbaum M, Iatridis JC, et al. Regional variation in tensile properties and biochemical composition of the human lumbar anulus fibrosus. Spine. 1994;19:1310–9.
Soltz MA, Ateshian GA. A conewise linear elasticity mixture model for the analysis of tension-compression nonlinearity in articular cartilage. J Biomech Eng. 2000;122:576–86.
Spencer A. Continuum theory of the mechanics of fibre-reinforced composites. New York: Springer; 1984.
Stoller P, Reiser KM, Celliers PM, Rubenchik AM. Polarization-modulated second harmonic generation in collagen. Biophys J. 2002;82:3330–42. doi:10.1016/S0006-3495(02)75673-7.
Thomopoulos S, Marquez JP, Weinberger B, et al. Collagen fiber orientation at the tendon to bone insertion and its influence on stress concentrations. J Biomech. 2006;39:1842–51. doi:10.1016/j.jbiomech.2005.05.021.
Tower T, Neidert M, Tranquillo R. Fiber alignment imaging during mechanical testing of soft tissues. Ann Biomed Eng. 2002;30:1221–33. doi:10.1114/1.1527047.
Vidal Bde C, Mello MLS. Structural organization of collagen fibers in chordae tendineae as assessed by optical anisotropic properties and Fast Fourier transform. J Struct Biol. 2009;167:166–75. doi:10.1016/j.jsb.2009.05.004.
Wagner DR, Lotz JC. Theoretical model and experimental results for the nonlinear elastic behavior of human annulus fibrosus. J Orthop Res. 2004;22:901–9. doi:10.1016/j.orthres.2003.12.012.
Waldman SD, Sacks MS, Lee JM. Imposed state of deformation determines local collagen fibre orientation but not apparent mechanical properties. Biomed Sci Instrum. 1999;35:51–6.
Wu HC, Yao RF. Mechanical behavior of the human annulus fibrosus. J Biomech. 1976;9:1–7.
Yang C-F, Crosby CM, Eusufzai ARK, Mark RE. Determination of paper sheet fiber orientation distributions by a laser optical diffraction method. J Appl Polym Sci. 1987;34:1145–57. doi:10.1002/app.1987.070340323.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer Science+Business Media, LLC
About this chapter
Cite this chapter
Cortes, D.H., Elliott, D.M. (2016). Modeling of Collagenous Tissues Using Distributed Fiber Orientations. In: Kassab, G., Sacks, M. (eds) Structure-Based Mechanics of Tissues and Organs. Springer, Boston, MA. https://doi.org/10.1007/978-1-4899-7630-7_2
Download citation
DOI: https://doi.org/10.1007/978-1-4899-7630-7_2
Publisher Name: Springer, Boston, MA
Print ISBN: 978-1-4899-7629-1
Online ISBN: 978-1-4899-7630-7
eBook Packages: Biomedical and Life SciencesBiomedical and Life Sciences (R0)