
Abstract
The design of intelligent terminal dance movement supplement and optimization system can systematically analyze the 3 D digital form of dance. And in the subsequent process of folk dance style presentation, we can better understand the characteristics of similar artistic style. This study analyzes the intelligent terminal action supplement technology and dance damage control technology, and shows that the motion capture technology can effectively prevent various dance style problems, produce strong economic benefits in the process of 3 D digitalization promotion, and realize the presentation and optimization of the subsequent dance art style content.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Based on the development, in the current process of art style presentation, the dance system and elements can realize the optimization of its intelligent terminal structure operation system, and can better understand the presentation characteristics of intelligent terminal art [1]. Make a systematic analysis of the dance art mode and its construction content, understand the development characteristics of dance art, and in the process of comprehensive digitalization and three-dimensional control of motion capture technology in the movement supplement, so as to make a good analysis for the subsequent inheritance of dance art content. To realize the optimization of intelligent terminal supplement technology, but also in the process of instance control, to strengthen the data structure operation, to create a new open space for the subsequent modern intelligent system terminal adjustment, but also to realize the comprehensive optimization of intelligent dance and artistic style.
2 Three-Dimensional Design of Dance Art
2.1 3D Data Acquisition of Dance
For dance 3 d data acquisition and analysis, it is based on dance capture technology, systematic analysis of dance three data structure, and then according to the concept of dance mapping, for motion capture type, capture mode and so on capture system optimization, understand the development of dance capture technology development view, also create open space for other art synthesis. In the development of motion capture technology, this becomes a comprehensive processing technology [2]. Through the three-dimensional structure of dance art, the camera and standard dance range for acquisition and control. Subsequently, multiple dance action map column forms are used to map the spatial position there. When the remote operation analysis can be made. Similarly, it can be further reconstructed according to the dancer's point of action and his action diagram, understand the three-dimensional data obtained from the dancer, and finally carry out modeling and structural analysis.
2.2 Intelligent Terminal and Dance Injury Prevention
In the process of building the intelligent terminal system, based on the data capture of each point point, from the same perspective of the dance capture system and the construction content of the dance injury prevention system, the content of the data integration can be systematically manually analyzed. Make automatic patching during the manual channel control process [3]. Data repair mode can be composed of two forms, one is to use the own software of the acquisition equipment to process the noise point, and apply the smooth equipment to make the analysis, the other is to use the animation software to supplement and optimize the keyframes.
3 Associated Imaging Reconstruction Algorithm Based on Web and Intelligent Terminal
A pseudo-heat source is a pseudo-heat light source. Light from the beam splitter 1:1. After the transmission, it reaches the target and the CCD, respectively. According to the status of the second-order expression work, for the core of the intelligent terminal correlation imaging technology, it is mainly a light input by the light in the object. After the prism transmission, it can constitute the same optical system output data and target. The overall relationship between the two is positively correlated. According to the principle of the reconstruction algorithm, part of it is the data processing system, and the different operations [4]. The results derive the second-order correlation from its GI algorithm, which is as follows:
where N is the indicating the light field of the reference arm in the n th acquisition, \(B_{n}\)\(I_{n} \left( {x,y} \right)\)
In the calculation process of the imaging formula, the overall principle is still very simple. It is based on the reconstruction algorithm to establish a common function relationship between the two arms. Therefore, when the light intensity in an object ratio is at a fixed value, the data of the other reference arm must also be a fixed value, and the weighted average of the two is the value we need to solve. During the course of this study, the weight factors in were essentially the same, and was correlated. The of the target arm constitutes its pixel information, otherwise, the reconstruction results are also very vague [5]. The of the DGI is as follows:
The the total light intensity with the reference arm based on the GI formula \(\left\langle {B_{n} } \right\rangle\)\({{R_{n} } \mathord{\left/ {\vphantom {{R_{n} } {\left\langle {R_{n} } \right\rangle }}} \right. \kern-0pt} {\left\langle {R_{n} } \right\rangle }}\),
The above formula represents the total light intensity at the n th acquisition of the reference arm. \(\left\langle {R_{n} } \right\rangle = \frac{1}{N}\sum\limits_{n = 1}^{N} {R_{n} }\) Represents the n th average of the total light, and the reconstruction results have a higher signal-to-noise ratio than the conventional GI reconstruction results:
The SNR represents the SNR of the imaging results. The higher the SNR, the better the subsequent quality. \(\sigma_{rel}^{2}\) Represents ote the relative variance of the target related to the transmission coefficient of the imaging target. It is related to the magnitude of the transmission coefficient of the imaging target. \(T\left( {x,y} \right)\) DGI far outperforms GI as high transmission coefficient objects, and DGI reconstruction is similar to GI. By comparing the reconstruction formulas of GI and DGI, Eqs. (1) and (4) show that when light passes through the object, it will become very small, which gives the DGI correction little effect to the overall effect, so that the imaging effect is not improved \(\left\langle {B_{n} } \right\rangle\).
The reconstruction formula is as follows:
The formulae of GI, based on the basic theory of association imaging, the second-order correlation formula, computed by weighted average only, with low computational complexity and strong robustness.
Concept can be computed perspective. Considering the two-arm structure of the correlation, the is associated with the object, such as formula _(1), which as the matrix form:
among \(T = \left[ {T\left( {1,1} \right),T\left( {1,2} \right), \cdots ,T\left( {p,q} \right)} \right]^{T}\)
\(K \times 1\) The vector representing the coefficient is calculated according to the coefficient data to represent the composed of the of the object arm end. \(B = \left[ {B_{1} ,B_{2} , \cdots ,B_{N} } \right]^{T}\)\(N \times 1\).
\(\Phi\) \(N \times K\) It is called the observation matrix. The data in the parallel data in the collection arm field, and forms the relevant column item vector:
Based on the correlation, a PGI (8)\(AX = Y\). The phase matrix constitutes a linear equation matrix relation, existing in form. The solution objective is transformed into the solution problem of the matrix equation. When the observed matrix is neither a full-rank matrix, nor a square matrix, nor an inverse. At this point, it can be to represent the of the matrix. \(A^{ - 1}\)\(X = A^{ - 1} Y\)\(\Phi\)\(X = A^{ + } Y\)\(A^{ + }\).
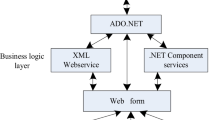
The architecture correlation imaging is shown in Fig. 2. Whose expressed as:
The GI reconstruction formula can also be expressed in the matrix form:
\(\left\langle \Phi \right\rangle = \left[ {\left\langle {I\left( {1,1} \right)} \right\rangle ,\left\langle {I\left( {1,2} \right)} \right\rangle , \cdots ,\left\langle {I\left( {p,q} \right)} \right\rangle } \right]\) \(1 \times K\) Where, it is the row vector, representing the average of each pixel of the reference arm, and it is a dimensional column vector with all elements of 1. The matrix can finally be called a feature matrix of GI by linking the reconstruction result to the coefficient T. \(I = \left[ {1,1, \cdots ,1^{T} } \right]\)\(N \times 1\)\(A_{GI}\)\(T_{GI}\)\(A_{GI}\).
\(A_{PGI}\) In order to unify, establish the connection formula the reconstructed matrices, and obtain the feature matrix of PGI, the be changed to writing in a similar form:
Scalar scalar matrix correlation imaging reconstruction algorithm.
In obtain the corresponding the reconstruction formula, it must be studied according to the correlation characteristics of the reconstruction proof. In view of the reconstruction effect, the matrix is analyzed according to the correlation status of the matrix itself. In fact, the subsequent. To improve, a scalar matrix-based correlation imaging reconstruction algorithm smgi (Table 1):
\(\psi_{x}\) Where, for the correction quantity, It can be reversed according to the constructed feature matrix: \(A_{SMGI}\)\(\psi_{x}\)
The formula of the SGI is follows:
4 Experiments and Results
In the construction process of the dance motion capture system and the dance injury prevention system based on the intelligent terminal, the various data are operational analyzed, and the design points and operation points can be better optimized according to the motion capture system evaluation and the design of the dance injury prevention mechanism. It can also complete the system design in the dance capture motion control and damage adjustment, so that the subsequent dance damage system content can really improve, improve the system synthesis, and realize the remote operation of the capture system and the structural end design breakthrough.
In the process of intelligent terminal language form control, the motion capture technology is shown in Table 2. In a systematic analysis of the supplementary content of each technology, the following operations need to be completed at the same time.
-
(1)
Use the interpolation to calculate the bone and the relative bone position, and transform the matrix.
-
(2)
Analyze the new orientation and grid model for the base position of the bone structure.
5 Conclusion
To strengthen the experimental structure design of intelligent terminal, this research makes a systematic analysis of the traditional photo and video recording methods, and obtains the exploration perspective on the development of dance art. In the process of applying computer motion capture technology and dance injury prevention and supplement control technology, the data structure of intelligent terminal and the operation guidance function are analyzed, which is a new view of the mutual integration of culture and technology, and also promotes the reform and breakthrough of digital construction project.
References
Zhong, Y.X., Xu, W., Yao, R., et al.: Research and design of motion capture and image reduction of dance. (2019–9), 37–42 (2021)
Yuanzhi, Y.: Research on tibetan guozhuang dance based on motion capture. China New Commun. 22(19), 239–240 (2020)
Guoliang, Y.: Research on dance video motion recognition techniques based on motion capture. J. Chifeng Univ. 38(9), 5 (2022)
Dong, L., Jianpeng, Z.: Research on portable intelligent power distribution integrated mobile terminal control system based on STM32. Electron. Des. Eng. 30(20), 7 (2022)
Zongbin, L.: Research on 3 D digital method based on motion capture technology. Fashion Tomorrow 02, 140–141 (2020)
Acknowledgements
2021 Guangdong Provincial Philosophy and Social Science Planning Project Youth Project: Project No.: GD21YYS14.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Li, C., Yang, Y. (2024). Research on Remote Dance Motion Capture Evaluation System and Dance Injury Prevention Based on Intelligent Terminal. In: Hung, J.C., Yen, N., Chang, JW. (eds) Frontier Computing on Industrial Applications Volume 2. FC 2023. Lecture Notes in Electrical Engineering, vol 1132. Springer, Singapore. https://doi.org/10.1007/978-981-99-9538-7_74
Download citation
DOI: https://doi.org/10.1007/978-981-99-9538-7_74
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-9537-0
Online ISBN: 978-981-99-9538-7
eBook Packages: EngineeringEngineering (R0)