
Abstract
The progress in wireless technology has simplified and streamlined the transfer or sharing of data, thereby maximizing its impact on societies worldwide. However, with these advancements, more memory space is needed to store the vast amount of information being transferred. To achieve this, the size of devices must be reduced, necessitating the scaling of MOS transistors to deep submicron levels. Transceiver is being one of the crucial components which is responsible for transmitting or receiving information from the wireless device. Within the wireless transceiver, the frequency synthesizer produces an stable output frequency and further mixed with the received signal down to lower frequencies and vice versa. To operate at high frequencies between 12 and 40 GHz, where operations are carried out at high speeds and coverage is done with multiple beams, circuits must be compatible with high speed. In this paper, we study the VCO component, list the design parameters, and propose a model in which the inductor is replaced with a gyrator-C active inductor to minimize the overall area and use the frequency of oscillations as per the requirement. The design is simulated at 90 nm technology on ADS design tool.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
15.1 Introduction
Due to the advancements in wireless technology and the increasing number of users with limited bandwidth, there is a growing demand for improved performance, such as high data rates with multimedia applications. As a result, designers are developing and fabricating wireless components. With the technological advancements and automation algorithms in the last three decades, it is now possible to fabricate all the components of a transceiver in any wireless communication system on a single IC.
The demand for increased bandwidth in communication systems, particularly in wireless communication, has resulted in the development of VLSI technology and the automation industry. Frequencies ranging from 12 to 40 GHz are of particular interest, where carrier signals of very high frequency range are used as shown by Lee et al. [1] applications which are mainly focused on military arm forces, communication used in aircraft and satellite, radio and radar communication. The range from 27 to 40 GHz is used in high-throughput satellite applications and is widely available.
15.2 Voltage-Controlled Oscillator Design
In any communication system whether it is a transmitter or a receiver, low noise amplifier (LNA) power amplifier, oscillator (VCO), and PLL are the main part of the system. In every communication system, voltage-controlled oscillator holds a crucial role. The high-frequency signals which are used as a carrier signal, are obtained with the help of voltage-controlled oscillator circuits. These days with the advancement in CMOS technology where inductors can be realized using MOSFETs so by using active inductors oscillators are designed which can be used to generate the signals up to the range of GHz as presented by Fahs et al. [2] and Banu [3]. The traditional method used to design VCOs is either by using CMOS ring oscillator or by using Harley and Collpit’s oscillator which uses LC as a tank circuit which are described by Akashe et al. in [4]. The evolution of wireless technology has led to the simplification and optimization of information transfer or sharing, which in turn has increased its impact on global society. Due to these advances, more memory space is required to store such a large transfer of information. This can only be done by reducing the device size which means scaling of MOS transistor to deep submicron levels. Its role is to transmit or receive the information to (or from) the wireless device. The purpose of the frequency synthesizer is to produce a steady output frequency that can be utilized to mix the incoming signal to lower frequencies, and vice versa. The generation of this consistent output frequency is achieved by implementing a Phase-Locked Loop (PLL). While working at high frequency at the range of 12–40 GHz, where the operation is carried out at a very high speed and the coverage is done with the multiple beams, the circuits used at high frequency should be compatible with high speed. So, in this paper, one very basic component which is the heart of communication system, i.e., VCO is studied and the design parameters have been listed in this paper with reference to Berroth [5] and Naseh [6]. A tunable VCO can generate a wide range of frequencies, making it useful in many applications. In a wireless communication system, for example, the VCO is used to generate a carrier signal whose frequency can be varied to transmit different data rates. The VCO frequency can be controlled by adjusting the input control voltage, which is usually derived from a phase-locked loop (PLL) or frequency synthesizer. A tunable VCO can also be used in radar systems, where the frequency of the transmitted signal needs to be varied to detect objects at different distances. In this case, the VCO frequency can be controlled by adjusting the input voltage to the oscillator circuit.
15.2.1 VCO Based on Inductor Capacitor Pair
A very basic voltage-controlled oscillator with an inductor and capacitor is shown in Fig. 15.1. The circuit contains inductor L and capacitor C which are parallel to each other. In the circuits, parasitic components are shown as RL and RC for the inductor and capacitor, respectively. To overcome the energy loss associated with these parasitic components, MOSFETs or CMOS can be utilized to have the negative resistance. The energy which is lost in the tank circuit is given by (15.1)

VCO based on inductor capacitor pair
The power loss experienced by the tank circuit is dependent on the value of inductance and operating frequency, with an inverse relationship between the two. By decreasing the series resistance R, which is directly proportional to the loss, the power loss in the tank circuit is reduced linearly. Additionally, an increase in the tank inductance results in a quadratic decrease in power loss. To counter the energy loss caused by the parasitic components, a MOSFET can be introduced to the circuit. To remunerate the stray resistance, a negative resistance-R can be introduced to the circuit by using active devices so that both the unwanted stray elements can be canceled out. This is done by using the transistors in cross-coupling topology in the tank circuit, and this is shown in Fig. 15.2.

Cross-coupled oscillator
The idea behind using the cross-coupled transistors as shown by Niaboli-Guilani [7] is to have the same value of conductance (gm) as provided by the negative resistance from the oscillator.
15.2.2 Ring VCO
A ring oscillator as shown in Fig. 15.3 can be designed by using a number of buffer stages, where all the buffers are connected serially and the output of nth stage is connected back to the first stage. The criteria for the oscillation are that the circuit must give a phase shift of 2π or 0 and voltage gain should be greater that equal to 1 depicted by Prajapati [8].

Ring oscillator
In ring oscillator, each stage produces a finite delay and the phase shift of π is generated by the active element, and the another required phase shift is provided by a dc inversion which is described by Razavi [9].
In this study paper, the previous section displays the frequently employed CMOS ring oscillator and LC tank oscillator VCOs. Specifically, the section highlights the LC oscillator circuits that can be used as they have the advantage that they have better noise characteristics, but with the drawback that this approach may have the large dimensions, so cannot be used where the phase shift is needed. On the other side, the cascaded voltage-controlled oscillator has the better performance parameters as compared to LC oscillator, but they also have the demerit that these circuits have less power requirements and minimum area on the chip, so they can be prone to noise. So, because of these clear advantages of ring oscillators, ring oscillators are preferred over the LC oscillators which are shown by Bormontov et al. [10] and Gupta [11].
15.3 Design Topologies
Its basic function of VCO is to generate a constant RF frequency in wireless transceivers. Besides having a simple design architecture, it is the most challenging block to design because of its operation at high RF frequencies in which the phase noise becomes significant and its parameters get deviated from desired values. When voltage at the input of VCO changes, then frequency at the output is varied. The VCO can be realized either as a ring oscillator or as resonant oscillators.
As shown in Fig. 15.4a, an inductor L and capacitor C are parallel to each other. The resonance frequency of this LC circuit is given by (15.2)

a LC parallel circuit, b resonance circuit, c series model of the circuit
At the given resonant frequency, the impedance of the inductor and capacitor which are written as \(jLw_{{{\text{res}}}}\) and \(1/(jCw_{{{\text{res}}}} )\), respectively, is opposite and equal to each other, thus resulting an infinite impedance. But in actual practical circuits these passive components have stray impedance indicated as resistive components, as shown in Fig. 15.4b and the quality factor for inductor is given as, Q as given in (15.3).
The losses attributed to RC are deemed negligible because the value of the capacitor’s quality factor (Q) significantly exceeds that of the inductor’s Q. The series model of the circuit is presented in the form of Fig. 15.4c.
Now, converting the resistor (Rs) which in series with inductor (L) in Fig. 15.5a into the parallel form in Fig. 15.5b, we get

a Inductor L with Rs as parasitic resistance, b series resistance conversion into parallel resistance
It can be concluded from (15.5) that the quality factor of the inductor plays an important role in determining the amount of energy lost in the tank. Figure 15.6 shows a simple gain stage based on an LC tank.

RLC gain stage used in the circuit
15.4 Design Parameters
Almost every transreceiver which is designed for wireless applications requires a tunable reference frequency. Thus, an ideal VCO is required that will generate an output which is linearity proportional to the applied input voltage. In addition to the linearity parameter, several other parameters significantly impact oscillator design. The following are some of the key parameters discussed below.
15.4.1 Linearity
Linearity and the tuning of a VCO have a trade-off. Ideally, linear tuning is required, but in actual implementation, the nonlinear behavior of VCO is observed as components used are also nonlinear. Linearity is the required to have the VCO gain (KVCO) constant as given in Fig. 15.7.

Ideal VCO tuning linearity
15.4.2 Range of Tuning
The range of tuning of oscillator is based on the following two specifications:
-
(i)
The center frequency of the tuning range must be remained constant with the frequency of oscillation.
-
(ii)
Frequency deviation due to even slight variations in temperature results nonlinearities in VCO characteristics. To minimize the effect of these variations, so, a wide tuning range is selected. But, these nonlinearities can be minimized by narrowing down the tuning range. Therefore, a trade-off exists between nonlinearities and tuning range.
15.4.3 Power Consumption
In a PLL, most power is dissipated by the VCO as compared to other components. In this paper, VCO is studied for RF transreceiver; therefore, priority is given to the tuning range and phase noise as compared to power.
15.4.4 Phase Noise
The sidebands present around the central frequency in frequency domain system are called the phase noise and the same sidebands in time-domain system are called jitter. Linear time-invariant model of phase noise given by Leeson is represented in (15.6)
-
QL = loaded quality factor.
-
fo = oscillation frequency.
-
Ps = signal power of oscillation.
-
fm = offset frequency.
-
F = noise factor of active devices.
-
k = Boltzmann’s constant.
-
T = temperature (Kelvin).
-
fk = flicker noise corner frequency in the phase noise.
$$\frac{{\left| {K_{VCO} } \right|^{2} }}{{2f_{m}^{2} }}S_{VCNT} ,\frac{{\left| {K_{VDD} } \right|^{2} }}{{2f_{m}^{2} }}S_{VDD} ,{\text{and}}\;\frac{{\left| {K_{IB} } \right|^{2} }}{{2f_{m}^{2} }}S_{IB}$$
are the sensitivity of the VCO to the control voltage, supply, and bias current, respectively. We observe that among various factors that can reduce phase noise, the circuit designer can control only three factors, namely, loaded quality factor, noise factor of active device, and signal power of oscillations.
-
(i)
The quality factor of the circuit is calculated by the amount of series resistance present in the LC tank.
-
(ii)
Resonators with a higher quality factor inherently exhibit lower phase noise.
-
(iii)
The inverse relationship between phase noise and output power (Ps). However, as the output power must be minimized, a trade-off between power and phase noise arises.
As the noise factor (F) is proportional to phase noise. Lowering the noise factor is directly linked to the active components used in the VCO. Therefore, devices with lower flicker noise are better for this application.
15.5 Various VCO Designs and Proposed Circuit
Various VCO structures have been studied, and their performance parameters have been compared. The comparison of performance parameters has been done for the designs which are designed for the frequency range between 24 and 40 GHz, i.e., suitable for the application of 5G circuits. The circuit presented by Allstot et al. [12] is used for the generation of a 24 GHz oscillatory signal. This signal has been generated using a 12 GHz voltage-controlled oscillator indirectly cascaded with passive mixer. The circuit has been implemented in 0.18um CMOS technology, the advantage of using the passive mixer reduces the power consumption and also increases the tuning range of the device. For the application of VCOs in Radar, it is used to find the highest frequency range of the system. In VCOs, varactor diodes are used to tune the frequency of the device. A complementary cross-coupled LC-VCO presented by Hou et al. [13] uses the MOSFET in accumulation mode for the tuning of the device. The LC tank resonator is used in the circuit which contains on-chip differential inductor and a pair of MOSFET that is used in accumulation mode for a good linearity. The circuit can be used for wireless high-quality video streaming. The circuit also uses the cross-coupled VCO used with varactor capacitance. The circuit provides the wide tuning range, less power consumption as well as low phase noise. Next approach that is indicated by Gao et al. [14] uses the concept of a varactor and MOM capacitor combination method for the tunability. The circuit indicates the high value of Q-factor and low phase noise VCO indicted by Ryu et al. [15] which provides high transconductance gm. In the given circuit, two N-type MOS are connected in parallel with the conventional VCO circuit. Capacitive division technique is used to increase the voltage swing and to lower the phase noise value. The design depicted by Sethi et al. [16] utilizes a low phase noise voltage-controlled oscillator (VCO) that has a higher transconductance (gm). This is achieved by incorporating parallel MOSFETs in the design, where two n-channel transistors are connected in parallel with the cross-coupled n-channel transistors of a typical VCO. The purpose of parallel MOSFETs increases the total negative conductance available to the circuit, which helps to cancel out the stray or small signal resistance of the LC tank. The VCO is implemented using CMOS technology, which provides low-power consumption and high integration density. The oscillator frequency can be controlled by adjusting the bias voltage, which changes the capacitance of the varactors in the circuit. The output signal from the VCO is then mixed with a frequency reference signal to generate the desired frequency output. Many designs use a MoM capacitor bank which is a high-power pulsed power supply for medical applications. This design employs a bank of MoM capacitors connected in parallel to store electrical energy and release it as a high-power pulse. The capacitors are charged using a high-voltage power supply, and a switch is used to discharge the energy into a load.
In this paper, we are proposing a basic circuit of the VCO with a minor change in the circuit which results not only reducing the area size but also provides indirect tuning for the circuit. The design of cross-coupled VCO is presented in Fig. 15.8 and has been simulated at 90 nm technology using BSIM4 MOSFETs, and the operation is carried out by the charging and discharging of inductor and capacitor. There will be the die down wave in the frequency of oscillations because of the loss of energy. This loss of energy can by represented by adding the Rp resistance in parallel to L and C.

Cross-coupled voltage-controlled oscillator
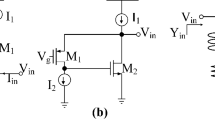
The circuit has been designed on ADS design tool, and the simulation is done at 90 nm technology. The output has been plotted differentially between Vop and Vom nodes. To avoid the degradation of VCO tuning range, the capacitively loading on the output nodes should be avoided. The device size is decided by considering the loss in the circuit. When the net currents are balanced, net voltage across the LC tank circuit is zero, and at that point, the noise will affect the circuit performance. The tuning of the VCO can be done by using the tunable active inductor. The oscillation produced is shown in Fig. 15.9, and the frequency of oscillations can be calculated by taking the Fourier transform of the (Vop-Vom). The tuning of the circuit is proposed by replacing the inductor L by gyrator-C-based inductor in which the direct tuning can be done by the biasing applied at the feedback MOSFET as shown in Fig. 15.10.

Frequency of oscillations of cross-coupled VCO

Tunable active inductor design
15.6 Conclusion
The study of voltage-controlled oscillators in the realm of wireless communication and other fields of application has been conducted, and the paper has presented the important design parameters to consider when designing a VCO. The paper has also explored the use of VCOs in applications such as radar and other wireless communication systems. Some designs have utilized the tunable active inductor approach, which could be enhanced by modifying the design technology. The paper proposes a simple approach of replacing the inductor L with a single-ended inductor. Additionally, the modification of using varactor diodes for charge storage in the tank circuit is also suggested.
References
Hajimiri, A., Lee, T.H.: Design issues in CMOS differential LC oscillators. IEEE J. Solid-State Circ. 34(5), (1999)
Hyvertl, J., Cordeaul, D., Paillotl, J.-M., Philippe, P., Fahs, B.: A new class-C very low phase-noise Ku-band VCO in 250 nm SiGe: C BiCMOS technology. (2015) 978-1-4799-8275-2/15/$31.00 ©2015 IEEE
Banu, M.: MOS oscillators with multi-decade tuning range and gigahertz maximum speed. IEEE J. Solid-State Circuits 23, 1386–1393 (1988)
Shrivastava, A., Saxena, A., Akashe, S.: High performance of low voltage-controlled ring oscillator with reverse body bias technology. Front. Optoelectron. 6(3), 338–345 (2013)
Tao, R., Berroth, M.: 5 GHz voltage-controlled ring oscillator using source capacitively coupled current amplifier. In: Proceedings of IEEE Topic Meeting on Silicon Monolithic Integrated Circuits in RF System, pp. 45–48 (2003)
Jamal, M., Kazemeini, M.H., Naseh, S.: Performance characteristics of an ultra-low power VCO. In: ISCAS'03 Proceedings of the 2003 International Symposium on Circuits and Systems, vol. 1. IEEE (2003)
Niaboli-Guilani, M.: A low power low phase CMOS voltage controlled oscillator. In: 17th IEEE International Conference on Electronics, Circuits, and Systems (ICECS) (2010)
Prajapati, P.P.: Analysis of voltage controlled oscillator using 45nm CMOS technology. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 3(3), (2014)
Razavi, B.: Design of analog CMOS integrated circuits, international edn. The McGraw-Hill Companies, Inc. (2001)
Bistritskii, S.A., Klyukin, V.I., Bormontov, E.N.: Ring voltage-controlled oscillator for high-speed PLL systems. Russ. Microlectron. 43(7), 472–476 (2014)
Yadav, N., Gupta, S.: Design of low power voltage controlled ring oscillator using MTCMOS technique. Int. J. Sci. Res. 3(7), 845–851 (2014)
Neihart, O.D., Neihart, M., Allstot, D.J.: differential VCO and passive frequency doubler in 0.18 µm CMOS for 24 GHz applications
Yan, N., Zhang, C., Hou, X.: Design of a LC-VCO in 65 nm CMOS technology for 24 GHz
Liu, Y., Li, Z., Gao, H.: A 24 GHz PLL with low phase noise for 60 GHz sliding-IF transceivers in a 65-nm CMOS. https://doi.org/10.1016/j.mejo.2021.105106
Behera, P., Siddique, A., Delwar, T.S., Biswal, M.R, Choi, Y. Ryu, J.-Y.: A novel 65 nm active-inductor-based VCO with improved Q-factor for 24 GHz automotive radar applications. https://doi.org/10.3390/s22134701
Rout, S.S., Acharya, S., Sethi, K.: A low phase noise gm-boosted DTMOS VCO design in 180 nm CMOS technology. https://doi.org/10.1016/j.kijoms.2018.03.001
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Prashar, R., Kapur, G. (2024). Study of Voltage-Controlled Oscillator for the Applications in K-Band and the Proposal of a Tunable VCO. In: Jha, P.K., Tripathi, B., Natarajan, E., Sharma, H. (eds) Proceedings of Congress on Control, Robotics, and Mechatronics. CRM 2023. Smart Innovation, Systems and Technologies, vol 364. Springer, Singapore. https://doi.org/10.1007/978-981-99-5180-2_15
Download citation
DOI: https://doi.org/10.1007/978-981-99-5180-2_15
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-5520-6
Online ISBN: 978-981-99-5180-2
eBook Packages: EngineeringEngineering (R0)