
Abstract
The frequency of an independent microgrid (MG) system is attempted to be controlled in this work utilizing an IMC-based PID controller and Droop-based controllers (DBC) or modified bias (MB) controller with Grey Wolf Optimization (GWO) in extremely unfavourable conditions. Frequency deviation occurred in the system because of mismatch between Actual Generated power and total load demand. To address this issue the MB & IMC-based gain parameters of the microgrid are taken into consideration for finding the limits of control parameters for GWO, which will make sure that the search points produced by GWO are robust and stable. In real-time simulation environments using the digital simulator OPAL-RT, simulation of the proposed (GWO-MBIMC) controller-based MG model has been appropriately tested. In various real-life situations, the system performance is obtained using the GWO-MBIMC controller and system outputs are closely investigated. The performance of proposed controller is compared with that of PSO-MBIMC, MBIMC, and MB-LDR controllers. The result shows that, in forms of peak deviation, time of settling and a smaller no. of oscillations, the proposed GWO-IMC controller provides the most optimum adaptive output.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
- Internal model control
- Intelligent control
- Grey wolf optimization
- Real-time simulator
- Microgrid
- Optimal tuning
- Secondary frequency control
1 Introduction
Distribution systems can transform existing passive distribution networks into active distribution networks that typically operate in grid connected channel by incorporating power generation on small scale. These small power plants however need to be isolated from the main power grid because vibration, voltage drop, swelling, faults are susceptible to the main grid frequency. Therefore, it is necessary to run them as a separate grid, called MG [1]. The modelling of MG and its frequency stabilization using the Ziegler–Nichols-based controller was presented in [2] and the LDR-based PID controller, in which the Ziegler–Nichols open loop approach is used as the tuning algorithm, was presented in [3]. It should be noted that with time delay, the Ziegler–Nichols closed loop cannot be extended to first-order or second-order systems. The tuning algorithm will automatically be shifted to the Ziegler–Nichols open loop if the Ziegler–Nichols closed loop approach is chosen for these situations. It is also found that under more stressed situation (worst situations), the scheme suffers from high peak variance. In order to achieve good dynamic frequency responses, a secondary controller [4] oriented MB has been documented, but scenario of high stress situation have not been considered. Even if it had been considered, its setting time would have been much higher. A modified bias type LDR (MB-LDR) controller has been suggested in [5] to obtain optimum PID controllers and frequency bias parameters for controlling the plant frequency under various operating conditions, including worst-case scenario. In reality, however, the LDR only considers open loop strategies because it has more settling time, peak overshoot, and more oscillations. The reliability of the open loop plant is, however, weaker than that of the closed loop plant. Thus, it is preferable to use a closed loop type approach for tuning PID gain values, such as the IMC technique [6, 7]. IMC approach is based on pole-zero cancellation. A low pass filter choice is very necessary in the IMC controller system design because it affects the device output. Low pass filter choices are suggested in [6] for several common plant models. In different fields of sciences and technology [7,8,9], this approach is often used. After selection of low pass filter, selection of closed loop time constant or filter coefficient (λ) is important for each process model to optimize PID performance. So, by using the trial and error approach to achieve optimum performance, it involves tuning by the designer, making it a time-consuming operation, and it is not guaranteed that it can have the universal solution. Meta-heuristic implementations, however, have proven to tackle these kinds of optimization concerns very effectively. In addition, meta-heuristic optimization efficiency relies greatly on how fertile the fields they are for searching. An Arbitrary collection of control variables ranges can result in inefficient search, and a variety of insecure (infeasible) search points may also be available. However, if MB & IMC related gain values are taken for choice of suitable ranges for the meta-heuristic search algorithm control variable, this would ensure that the search algorithm produces secure (feasible) search points and as a result, the algorithm performs better. MB & IMC focused gain values are the guiding parameter for selecting the limit for efficient search of the control variables in this context alone.
A contemporary meta-heuristic method, known as GWO, is proposed in [10] and Particle swarm Optimization (PSO). PSO method is old but very well-known algorithms so, authors have not given their detailed descriptions. It has been used for the purposes of comparison with GWO only. GWO is based on the social cooperation and hunting behaviours of grey wolves to locate and pursue a prey (solution) [11, 12]. GWO implementation is quite effective compared to other optimization techniques since particular input parameters are not needed. In GWO, regardless of their capabilities, three better wolf categories have been given the same weight in order to estimate the next position of the wolf in the iterative process.
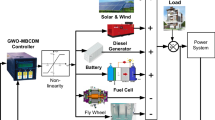
In this paper, a recent meta-heuristic technique known as GWO is taken into consideration to calculate the best gain values of the proposed controller. The suggested controller is an MBIMC-based controller to control the frequency of a self-reliant MG system, as shown in Fig. 1. Additionally, OPAL-RT LAB (OP4510), a digital version of OPAL-RT, was employed to validate the MG system on a real-time platform. The steps for the OPAL-RT lab-based real-time Simulink are described in [13].

Basic MG islanded diagram
The following are the main contributions of this work:
-
i.
Design the proposed controller (i.e. GWO-MBIMC Controller), with use of GWO algorithms to optimize its gain and frequency bias parameters.
-
ii.
On the real-time simulator OPAL-RT LAB (OP4510) platform, the suggested controller's realistic performance is verified.
The structure of this article is as follows: Sect. 2 provides the theoretical foundation for MG modelling, variation in power and frequency, and modified bias (MB) type controller design. The design of an IMC-based gain is described in Sect. 3. Section 4 presents the use of the GWO type MBIMC controller and its functionality in MG. A comparison of the tuned controller parameter using conventional and evolutionary methods (GWO and PSO) is shown in Sect. 5. Section 6 presents the findings of the real-time simulation. In Sect. 7, the results are summarized.
2 Modelling and P-F Droop Design for MG Plant
The self-governing power source's average rating is the same as the load rating, considering a 100% independent isolated microgrid. The Detailed Description about Modelling of Uncontrollable source, Controllable source, and Designing of p-f droop for all the controllable sources using bode plots, relation between power and frequency deviation, etc. are depicted in [3, 5].
3 Design of IMC Controller Parameters
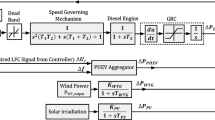
In this article, a third-order for the DEG and second order for remaining secondary controllable sources with plant are shown in Eq. (1). The PID controller design procedures using IMC tested by the real-time simulator using MATLAB. The Detailed Description about IMC parameters are depicted in [6,7,8,9, 14].
where \(T_{\deg t}\), \(T_{\deg g}\), \(T_{{{\text{ae}}}}\), \(T_{{{\text{fw}}}}\), \(T_{{{\text{fess}}}}\), and \(T_{{{\text{bess}}}}\) are time constants of turbine and governor of DEG, AE, FC, FESS, and BESS, respectively, whereas \(K_{{{\text{hps}}}}\) and \(T_{{{\text{hps}}}}\) are the gain and time constant of Hybrid Power System. The detailed description of all system parameters is given in appendix.
4 Application of GWO on MBIMC-Based Controllers
If the controller is required in an electrical network, all conditions, including plant robustness, dynamics and so on, should be optimum. The output of the controller is thus verified using different objective functions. The objective function allows producing a transient response with minimum numbers of oscillations, overshooting, and settling time from an optimization perspective. Keeping this in mind, the ISE is considered as an objective function in Eq. (2) for determining transient responses based on minimum time for settling. Number of oscillations and peak overshoot in this research.
Here, Δf and T are the microgrid frequency deviation and simulation time, respectively.
Implementation of GWO-MBIMC technique, the GWO Method & Regular flow chart in Figs. 3 and 4 depicts the stages involved in developing the proposed controller-based GWO technique and the reader might refer to [10,11,12] for a more in-depth discussion of the GWO approach. The GWO-based MB & IMC technique has used to conduct this research. Figure 3b, also demonstrates how the parameters of the proposed controller-based ISE objective function have been chosen. Table 1 also shows the maximum and minimum ranges of the controller settings.
5 Tuned Controller Parameters for Comparative Analysis
The key aim of the controller is to mitigate the frequency deviation by adjusting the secondary sources supply's power output and also producing an acceptable control signal to boost the efficiency of the system. There is a possibility of adverse contact between these regulators, in the presence of several secondary sources, contributing to the disruption of MG frequency. There is not a single description so far for applying optimum tuning techniques to all loops. Consequently, to prevent adverse interactions [4], the individual PID controller must be appropriately tuned.
In PSO-MBIMC and GWO-MBIMC techniques we have calculated all values of controller parameter from the MATLAB programming code. Table 2 provide the frequency regulation parameters, i.e. Kf and gain values for PID controllers, i.e. Kp, Ki, and Kd obtained by the MB-LDR [13], MBIMC [14], PSO-MBIMC [14], and Proposed GWO-MBIMC methods.
The value obtained from the above table has been used in the Fig. 5 of [12], and the results were compared. The GWO-MBIMC and PSO-MBIMC convergence characteristics are seen in Fig. 2. This graph is showing that the GWO algorithm is more superior to PSO. MB & IMC focused gain values are the guiding parameter for selecting the limit for efficient search of the control variables for GWO & PSO.

Convergence characteristics

a 3D position of GWO scheme, b Process of determining optimal constraints of the proposed GWO-MBIMC controller


Scenario-1 result, a Multiple signal fluctuation versus b frequency deviation
6 Real-Time Simulation Results and Discussion
In the MATLAB (SIMULINK) (R2018b) system, Fig. 5 of [13] is designed and applied to real-time simulation in the OPAL-RT environment [13]. In order to research the output of the microgrid plant and evaluate the effects in depth by subjecting the plant to power fluctuations at both source and load sides, the microgrid system is run for 70 s. It is considered that the plant has wind power, solar power, and load at the beginning.
Solar and wind systems provide constant powers of 0.4 pu and 0.3 pu, respectively, whereas load demand is estimated to be 0.7 pu prior to any type of disturbance. On Intel, 4 GB RAM and 3.4 GHz core i-7 C.P.U computer, the simulation of the research model is carried out through optimization programmes. For the GWO process, 30 population sizes and 50 iteration numbers are considered in this article. The optimization technique runs individually 3 times, and as controller parameters, the best optimal results are used. The GWO-MBIMC method obtained results are compared to those obtained from the PSO-MBIMC, MBIMC, and MB-LDR controllers, and it is observed that out of all four methods, the proposed method produces the best responses. System efficiency is considered for 4 separate scenarios, which are defined in Figs. 5, 6, 7 and 8, respectively.

Scenario-2 result, a signals fluctuation versus b frequency deviation

Scenario-3 result, a load signal deviations versus b frequency deviation

Scenario-4 result, a Solar signals fluctuation versus b frequency deviation
Scenario-1: Realistic Situation (Real-Time Fluctuation in Wind Energy, Solar Energy, and Load):
Here, simultaneous disruptions are considered in this case in terms of wind capacity, sun irradiation strength, and load. The combined variations in wind energy, solar energy, and load are seen in Fig. 5a. Figure 5b demonstrate the action of Frequency Response.
Scenario-2: More Stressed Situation (Parallel Fluctuation in Wind Energy and Solar Energy and Load):
In this case, the load demand is increased from 0.7 pu to 0.8 pu while the wind and solar power are varied from 0.3 pu & 0.4 pu respectively to 0 pu (worst/stressed situation) for a duration of 70 s as seen in Fig. 6a. The results of the frequency response are displayed in Fig. 6b.
The microgrid faces rapid oscillations due to immediate variation in the load. This large fluctuation in the microgrid frequency is due to a quick major change in both generation and load. All of the secondary sources in the microgrid have their output responses tuned in order to reduce the imbalance between power demand and frequency deviation.
Scenario-3: Wind and solar power sources are held constant while the load is increased from 0.7 pu to 0.82 pu for 70 s. (time domain analysis)
As illustrated in Fig. 7a, the only load on the MG system is changed in this part in a step pattern across a time range of 2–62 s. Using the MB-LDR, MBIMC, PSO-MBIMC, and suggested GWO-MBIMC-based controllers, the frequency responses of the MG system under the modification of step pattern-based load are obtained as shown in Fig. 7b.
Scenario-4: For a period of 70 s, the solar is varied from 0.4 pu (highest range) to 0.24 pu (lowest range), while the load (0.7 pu) is maintained constant. (Time Domain Analysis)
As shown in Fig. 8a, the amount of sun irradiation is gradually changed from time 5 to 55 s. The frequency responses of the system's controllers to variations in solar sources are shown in Fig. 8b.
For this all 4-test scenario, both MB-LDR and MBIMC controllers failed and could not stabilize the microgrid frequency although the suggested PSO-MBIMC methods produce better responses in all situations. The results of the simulation indicate that the dynamic output response of the proposed GWO-MBIMC controller produces best results in terms of settling time, peak transient variance, and number of oscillations in all of the above-mentioned scenarios.
7 Conclusion
The regulation of the load frequency of microgrid associated with non-conventional sources is being investigated. An approach is made to improve the performance of microgrid system where a MBIMC-based controller is designed and its values are optimized using GWO-based modern meta-heuristic technique. In an OPAL-RT digital simulator-based environment for real-time simulation, the new proposed GWO-MBIMC controller is also applied to verify the output of microgrid in a number of scenarios.
The simulation results on real-time platform obtained using proposed GWO-MBIMC techniques are compared with that of other methods like PSO-MBIMC, MBIMC, and MB-LDR. It is observed, from simulation results, that GWO-MBIMC controller gives better results over other methods in terms of smaller number of oscillations, settling time and peak deviation and stability of microgrid during transients, thus shows that the proposed controller provides optimal stable operation.
References
Bevrani H (2009) Robust power system frequency control, 2nd edn. Springer, Berlin
Mallesham G, Mishra S, Jha AN (2011) Ziegler-Nichols based controller parameters tuning for load frequency control in a microgrid. In: 2011 International conference on energy, automation and signal, Bhubaneswar, Odisha, pp 1–8. https://doi.org/10.1109/ICEAS.2011.6147128
Kumar B, Bhongade S (2016) Load disturbance rejection based PID controller for frequency regulation of a microgrid. In: 2016 Biennial international conference on power and energy systems: towards sustainable energy (PESTSE), Bengaluru, India, pp 1–6. https://doi.org/10.1109/PESTSE.2016.7516459
Mishra S, Mallesham G, Sekhar PC (2013) Biogeography based optimal state feedback controller for frequency regulation of a smart microgrid. IEEE Trans Smart Grid 4(1):628–637. https://doi.org/10.1109/TSG.2012.2236894
Kumar B, Bhongade S (2017) Load disturbance rejection based PID controller for frequency regulation of a microgrid. Ind J Electr Eng Comput Sci 7(3):625–642. https://doi.org/10.11591/ijeecs.v7.i3.pp625-642
Rivera DE, Morari M, Skogestad S (1986) Internal model control: PID controller design. Ind Eng Chem Process Des Dev 25(1):252–265
Suvilath S, Khongsomboun K, Benjanarasuth T, Komine N (2011) IMC-based PID controllers design for a two-links SCARA robot. In: TENCON 2011—2011 IEEE region 10 conference, Bali, pp 1030–1034. https://doi.org/10.1109/TENCON.2011.6129267
Yadav AK, Gaur P (2015) Intelligent modified internal model control for speed control of nonlinear uncertain heavy duty vehicles. ISA Trans 56:288–298
Touati N, Saidi I, Dhahri A et al (2019) Internal Multimodel control for nonlinear overactuated systems. Arab J Sci Eng 44:2369–2377. https://doi.org/10.1007/s13369-018-3515-5
Mirjalili S, Mirjalili SM, Lewis A (2014) Grey wolf optimizer. Advances in Engg. Software 69:46–61
Padhy S, Panda S, Mahapatra S (2017) A modified GWO technique based cascade PI-PD controller for AGC of power systems in presence of plug in electric vehicles. Eng Sci Technol Int J 20(2):427–442
Guha D, Roy PK, Banerjee S (2016) Load frequency control of interconnected power system using grey wolf optimization. Swarm Evol Comput 27:97–115
Kumar B, Adhikari S, Datta S, Sinha N (2019) Real Time simulation of modified bias based load disturbance rejection controller for frequency regulation of islanded micro-grid. Int J Emerg Electr Pow Syst 20(5):1–13
Kumar B, Adhikari S, Sinha N (2021) Real time simulation of an intelligently optimized controller to control the frequency of an islanded AC microgrid: MBA-MBIMC tuning approach. In: 2020 3rd International conference on energy, power and environment: towards clean energy technologies, pp 1–6. https://doi.org/10.1109/ICEPE50861.2021.9404465
Kumar B, Adhikari S, Datta S, Sinha N (2021) Real time simulation for load frequency control of multisource microgrid system using grey wolf optimization based modified bias coefficient diagram method (GWO-MBCDM) controller. J Electr Eng Technol 16:205–221. https://doi.org/10.1007/s42835-020-00596-2
Acknowledgements
We would like to express the deepest appreciation to TEQIP-III NIT Manipur for providing the OPAL-RT loop simulator on a real-time platform that has made it possible to validate all system responses.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Appendix
Appendix
-
A.
Nominal parameters of the MG.
\(f_{{{\text{sys}}}}\)= 50 Hz, \(P_{{{\text{base}}}}\)= 1MVA, D = 0.012 MW/Hz, M = 0.2 s, \(T_{\deg \,g} =\) 2 s, \(T_{\deg t} =\) 20 s, \(T_{{{\text{fc}}}}\)= 4 s, \(T_{{{\text{ae}}}}\)= 0.2 s, \(T_{{{\text{bess}}}}\)= 0.1 s, \(T_{{{\text{fess}}}}\)= 0.1, \(K_{{\deg {\text{g}}}} = K_{{\deg {\text{t}}}} = K_{{{\text{ae}}}} = K_{{{\text{fc}}}} = K_{{{\text{bess}}}} = K_{{{\text{fess}}}} = 1\), \(K_{{{\text{hps}}}} = 83.33\), \(T_{{{\text{hps}}}}\)=16.67.
-
B.
Nominal MG parameters.
Wind Power Source (300 kW), Solar Power Source (400 kW), Load (700 kW), Diesel Generator (500 kW), Fuel Cell (200 kW), Aqua Electrolyzer (100 kW), Battery (30 kWh) and Fly Wheel (30 kWh).
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kumar, B., Adhikari, S., Sinha, N. (2024). Design of GWO-MBIMC Controller to Stabilize the Frequency of Microgrid on Real-Time Simulation [OPAL-RT OP4510] Platform. In: Swain, B.P., Dixit, U.S. (eds) Recent Advances in Electrical and Electronic Engineering. ICSTE 2023. Lecture Notes in Electrical Engineering, vol 1071. Springer, Singapore. https://doi.org/10.1007/978-981-99-4713-3_22
Download citation
DOI: https://doi.org/10.1007/978-981-99-4713-3_22
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-4712-6
Online ISBN: 978-981-99-4713-3
eBook Packages: EngineeringEngineering (R0)