
Abstract
According to the WHO Global Road Safety Report [10] and the MoRTH Accident Report [12], fatal road accidents involving pedestrians are increasing yearly. The primary factor contributing to these rising statistics is vehicle speed, which calls for a thorough examination of the overall situation. The current study compares the interactions between vehicles and pedestrians on two separate roadway facilities in Gujarat, India, with varying vehicle speeds and pedestrian behavior characteristics. This study compares the severity of interactions at the two roadway facilities, which is primarily based on speed and safety analysis. An automatic trajectory extractor is used to retrieve the speeds and Time to Collision (TTC) of both the entities involved in interactions. It was observed that the pedestrians keep a higher distance from the interacting vehicle on National Highway (NH) because of the higher speed of the interacting vehicles. The present study revealed that although Time-to-Collision (TTC) is lower in urban settings, and higher on National Highways even than fatality rates are significantly higher on National Highways due to elevated vehicular speeds. This underscores the complex relationship between speed, collision risk, and outcome severity. A new risk factor is introduced as the fatality risk Index to assess the overall risk of different traffic facilities. This study can work as a means to measure the safety of different traffic facilities and develop safer options for the movement of pedestrians across different facilities involving interaction between vehicles and pedestrians.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Pedestrians and vehicles mostly share a common space while the pedestrian undergoes road crossing maneuvers if a dedicated grade-separated pedestrian infrastructure is not provided at the designated location. In such situations, it is inevitable for pedestrians and vehicular traffic to interact with one another. The vehicle and pedestrian negotiate their way around each other by following the traffic control devices or by social rules and understandings. These interactions, in many cases, lead to conflict between the two interacting parties, which in some cases often leads to accidents or other risky conditions. According to the Ministry of Road Transportation and Highways [1], it has been reported that in the year 2020, 31.8% of the total accidents occurred on National Highways. Among the total fatal accidents, 35.9% were on National Highways (NHs) [1]. At the same time, pedestrian accidents on NHs were 12%, out of which 16.3% resulted in fatalities. Road accidents are multi-casual and often result from human error, road environment, and vehicular conditions. This study presents a comparative analysis of the vehicle–pedestrian interactions on an Urban (U) Road and a National Highway in mixed traffic conditions. Overall, 272 vehicle–pedestrian interactions on the Urban Road are compared with 158 vehicle–pedestrian interactions on the National Highway. It is observed that the decision of pedestrians to undergo an illegal crossing is different at different facilities. Post Encroachment Time (PET) and Time to Collision (TTC) are some of the frequently used Surrogate Safety measures. A research work employed Surrogate Safety measures into groups using the Time-To-Collision (TTC), the Post Encroachment Time (PET), and the deceleration families, plus two extra groups for other and unspecified indicators and found that Time to Collision is frequently used, followed by PET [2]. Conflict points, pedestrian and vehicle velocity, vehicle class, conflict type, and Time to Collision (TTC) are the parameters that have been identified and estimated. TTC is defined as the time taken by the later entity, either pedestrian or vehicle, to arrive at the conflict point, provided that the conflicting entity continues with its speed and direction [3]. This paper is presented in two sections, the first section summarizes the comparative speed characteristics of the two roadway facilities, and the second section focuses on the safety and severity levels of the identified interactions. The findings of this study can augment current pedestrian safety recommendations and offer guidance to those who design safe and effective traffic facilities. Lastly, the variability index (VI) and severity level of the obtained vehicle–pedestrian interactions are used to provide a new safety index to compare the risk of crossing at Urban and National Highways.
2 Literature Review
Previously, researchers have employed the idea of surrogate safety measures utilizing one or a combination of characteristics for the interaction between pedestrians and vehicles. It is advantageous to use TTC as a Surrogate Safety Measure (SSM) because of its ability to quantitatively capture the severity of interaction [4]. Researchers have studied the vehicle–pedestrian interactions on Urban Roads with mixed traffic conditions by extracting trajectory data [3]. It was observed that the ratio of aggressive to non-aggressive behavior was more prominent in the case of vehicles, while pedestrians were seen to exhibit less aggression. A distance-based surrogate safety metric known as Safe Distance (SD) is established which is identified based on vehicle–pedestrian interactions [5]. The findings demonstrated that SD rises as vehicle size and speed increase. A study was conducted to analyze the behavior of vehicle–pedestrian interactions on midblock crossings with a High-resolution LiDAR [6].
A study that was conducted to determine the severity levels of vehicle–pedestrian interactions concluded that due to male pedestrians’ tendency to take more risks, interactions involving male pedestrians had a higher severity level while for the same pedestrian gender and vehicle type, the severity level falls as pedestrian crossing speed increases [7]. Conflict risk evaluation models and their thresholds are developed based on the vehicle–pedestrian interaction data to be used in real-time risk evaluation models [8].
Few studies have also focused on the studies done to improve the existing pedestrian facilities. Some researchers have re-examined the pedestrian crossing warrants by analyzing pedestrian safety and vehicle delays at vehicle–pedestrian intersections at urban midblock sections [9]. The study suggested using PV2 values (where P is the volume of pedestrians crossing the roadway facility per hour and V is per-hourly vehicular traffic volume) to define thresholds for various types of pedestrian crossing facilities. In Global Status on Road Safety 2018 by WHO, it was mentioned that over 1.35 million people die each year in traffic crashes, and about 50 million are injured. Road accident is the eighth leading cause of death for people of all age groups, while it stands first for children and young adults in the age group of 5–29 years. In addition to this, low-income countries have three times higher death rates when compared to high-income countries [10].
As per the Ministry of Road Transportation and Highways [1] report, for the third consecutive year [11], the fatal road accident victims largely constitute young people in the productive age groups [1]. Young adults aged 18–45 years accounted for 69% of victims in 2020. Regarding road user categories, the share of Motorized 2-Wheeler (2W) riders in total fatality has been the highest (43.5%) during 2020, followed by the Pedestrian road users with 17.8% of persons killed in road accidents, as shown in Table 1.
As per the MoRTH Accident Report—2020, it was reported that pedestrian fatalities are increasing by 0.5–2.0% every year, as shown in Fig. 1, which is of significant concern and shows the gravity of the problem [12]. Also, it is important to mention that in the year 2020, traffic was constrained due to the lockdowns; even then, the fatalities were relatively high for pedestrians, which shows the need to study the safety aspects of vehicle–pedestrian interactions.

Yearly pedestrian fatalities rate
This study aims to present the vehicle–pedestrian interactions with the severity levels, which can be used in favor of pedestrians to reduce the number of accidents and provide solutions for the safer movement of pedestrians. The critical situation of vehicle–pedestrian interactions is studied using the data collected using Unmanned Aerial Vehicles (UAVs) to get accurate and precise analysis.
3 Methodology
Traffic conflict is generally defined as the event in which at least one of the interacting entities has to deviate from its path to avoid a collision. To study conflicts, proactive techniques like the use of surrogate safety methods have been followed by various researchers at different traffic facilities [13, 14].
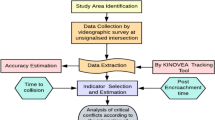
The study presented in this paper is divided into two sections, with one section dedicated to comparative speed study and the second to the safety and severity analysis, which presents certain conditions that can be used to determine the severity levels of a particular interaction at a particular road type. The concept of surrogate safety measures is used in the present study to perform the safety analysis. The methodology adopted for the present study is shown in Fig. 2.

Methodology adopted for the present study
The analysis results of Speed, Time to collision (TTC) analysis (surrogate safety measure for the study), and Severity are then used to compare and give recommendations which the field engineers can use to plan for improving the present infrastructure facilities for pedestrians to reduce the risk levels and fatalities. Different planning approaches should be adopted for both Urban roads and National highways as the severity of vehicle–pedestrian interaction is different in both cases.
4 Data Collection
Videography data was collected from the selected study sections under clear weather conditions using a UAV. The required pedestrian and vehicle data, including the type of interaction (Vehicle Passing First (VPF) or Pedestrian Passing First (PPF)), the speeds of vehicles and pedestrians during their interaction, and the distance between them, were extracted from video using automatic trajectory extractor software. TTC was determined based on the noted distances.
The two interaction cases of vehicle passing first and pedestrian passing first have been shown in Fig. 3. Past studies have mentioned that UAVs’ advantages include time and money savings, enhanced data measurement accuracy, and improved data recording security [15]. Hence, the use of UAVs was preferred for data collection over static data collection.

Vehicle passing first (VPF) and pedestrian passing first (PPF) interaction observed in NH study section
The spot speed data were collected through a radar gun for a short period of different vehicle classes (Fig. 4), which was later used to validate the speeds obtained from the UAV video through an automatic trajectory extraction tool. Vehicles’ spot speeds in urban and NH study sections were extracted from video using DataFromSky software.

Spot speed data collection through radar gun
The significance of the difference between both the spot speed data is checked using the F-Test for all the vehicle classes separately. It was observed that there is no significant difference between them at 5% level of significance as the P-value for all the vehicle classes came to be less than 0.05 as shown in Table 2. Thus, the spot speeds extracted from UAV data resemble the actual spot speeds on the field and can be used for analysis.
5 Data Processing and Analysis
5.1 Speed Analysis
Different drivers choose different speeds depending on various factors such as vehicle limitations, roadway conditions, and driver ability. A single speed value cannot correctly represent all the speeds at a specific location. Different drivers react differently to the same driving conditions, and these differences also affect their choice of speed. Hence, it is important to study speed as a separate entity. The vehicle classes considered in this study were Motorized 2-Wheeler (2W), Motorized 3-Wheeler (3W), Car, and Heavy Vehicles (HV), which include LCV, Bus, and Heavy commercial vehicle (HCV)) are the majority of vehicles in the overall traffic composition. Figure 5 shows the heat map in the NH study section at different speeds.

Heat map showing speed variation across the NH study section
To have confidence that the speed difference is there at U and NH sections, F-test is conducted, and it is observed that there is a significant difference between speeds at both sections for different vehicle categories at 5% level of confidence (Table 3).
Figure 6 shows the cumulative frequency distribution of speed on the Urban (U) road section and National Highway section (NH) for different vehicle classes. Table 4 shows that the mean speed of cars is highest for both the road sections and the mean speed of 3W is the least in the case of NH and HVs have the least speed in U section. It can be because the 3Ws drove mostly near the curb lanes and constantly picked up and dropped pedestrians near the NH study section. The variation in speed is high in cars on urban roads and NH.

Cumulative distribution function (CDF) of speed data for a 2W, b 3W. c Car. d HV
The 15th, 85th, and 98th percentile speeds are determined by analyzing the spot speeds of different vehicle classes, as shown in Table 4. The maximum observed speed is 77 km/h for 2W on the NH. The 15th percentile speed, which signifies slow-moving vehicles, for cars is 27.5 km/h and for HV is 20.63 km/h for U road section, whereas for NH, the same for cars is 46.16 km/h (67.85% higher) and for HV is 34.81 km/h (68.73% higher). For 2W on the U road section, the 15th percentile speed is 43.31% lower than on NH. Also, the 98th percentile speed of cars for the Urban Road Section is 34.89% lower than in NH. The mean speed of 3W for the U road section is 24.12% lower than in NH, whichh is the least among all vehicles due to its repetitive stop-and-go conditions.
Table 5 depicts that the vehicles traveling with speeds greater than or equal to the 85th percentile speed for the interacting vehicles in NH are 59.32% higher than in the Urban road section. It shows higher aggression in driving style in NH as compared to the urban road section.
5.2 Variability Index
To predict the variability of Spot Speed data, a parameter known as Variability Index (VI) is used [16]. It is the ratio of the difference between the 90th percentile and 10th percentile to 50th percentile speed. It signifies the given data is how much variable between 10 and 90th percentile speed to 50th percentile speed shown in Eq. 1.
According to Table 6, the highest variability index in urban roads is about 0.74 for 2W, which is 60.81% more than NH, and the lowest is 0.57 for 3W. Whereas in NH, the highest variability index is 0.59 for HV, which is 18.05% less than Urban Road because lane changing operation is more in urban roads than in NH. Another reason can be that the value of the variability index is lower on NH than on Urban Road because the speed of vehicles on NH is more consistent as fewer obstruction to traffic is observed there.
Figure 7 shows the cumulative frequency distribution of the variability index on the Urban (U) road section and National Highway section (NH) for different vehicle classes.

Cumulative distribution function (CDF) of variability index for a Car. b HV
Speed Spread Ratio (SSR) is used to check the normality of speeds [17]. It is the ratio of the difference between the 85th percentile and 50th percentile to the difference between the 50th percentile and 15th percentile speed. As per the SSR, the vehicles having an SSR range between 0.86 and 1.1 follows the normal distribution. In the present case, SSR for all the vehicle classes on both Urban Road and NH is almost equal to 1, signifying it follows a normal distribution.
5.3 Time to Collision (TTC)
The safety analysis of any traffic facility should be done through proactive techniques. One of these techniques is the use of surrogate safety measures. In the present study, time to collision is taken as the surrogate safety study. The time taken by the later entity (pedestrian or vehicle) to arrive at the conflict point provided that the conflicting entities continue with their speed and direction is known as the time to collision (TTC).
It should be observed that the calculations are based on the assumption that the driver and the pedestrian, respectively, are not distracted while driving a vehicle and crossing a roadway.
As shown in Fig. 8, Time to collision (TTC) is less for Urban roads compared to the NH as the pedestrians take a higher risk due to the lower speeds of vehicles in the urban sections. However, due to the higher speeds of vehicles at the NH, pedestrians keep a higher distance from vehicles while crossing roads to ensure safety, leading to higher TTC values.

Cumulative distribution frequency (CDF) for a VPF and PPF for U and NH. b TTC for U and NH
As observed from the box plots presented in Fig. 9, it can be said that the variation in TTC is less on the Urban road in both the cases—VPF and PPF as compared to that on the NH as the decision of pedestrians to cross the roadway facility is more rigid for an Urban road because of the less vehicular speeds which is just an opposite scenario to that observed on an NH. It can also be observed that the mean TTC values for pedestrians passing the first case are higher for both road sections. It can be attributed that while pedestrians pass the first case, pedestrians maintain a higher distance from the interacting vehicle but for vehicles passing the first case, pedestrians respond quickly and start crossing the road as soon as the vehicle passes the point of conflict as he feels safe afterward.

Box plot for TTC for different road sections
As observed from the distribution plots shown in Fig. 10, it can be said that the mean TTC lies in the range of 0–1 s for the Urban road, whereas for NH, it can be observed between 2 and 4 s. Because the vehicular speeds are high on NH and pedestrians try to keep larger gaps with the interacting vehicle while crossing the road; thus, higher values of TTC are observed for such cases. The analysis indicated that it is difficult to assess the risk just by observing the TTC as different speeds are observed for both sections. Hence, further analysis is carried out to evaluate the risk and severity of vehicle–pedestrian interaction.

Probability distribution frequency (PDF) for TTC on U and NH
5.4 Severity Analysis
Speed is a major factor that is related to the safety of pedestrians on roads. It mainly depends on factors like roadway conditions, vehicle limits, and driver’s ability or experience. The probability of pedestrian deaths resulting from various vehicle speeds, as shown in Table 7, is given in Speed Concepts: Informational Guide by the Federal Highway Administration. Higher operating speeds result in more severe crashes. If pedestrians are involved in crashes, the fatality risk increases as the impact speed increases. Cars and HV have a major impact on pedestrian collisions.
From Fig. 11, it can be observed that vehicle speed varies between 25 and 50 km/h on the Urban road, and the average value of TTC varies in the range of 0–1 s, whereas on NH, it is 3–4 s. If speeds are, then the average speed on interaction varies in the range of 40–60 km/h, which is quite high as compared to urban sections. Hence, the risk of crossing also depends on the speeds of vehicles involved in the crossing event. To study the probability of a pedestrian getting into a fatal conflict a new risk index is proposed in this study as the Fatality Risk Index (FRI).

Variation of TTC with speed on U and NH
FRI is the ratio of the number of probable interactions that could lead to fatality to total interactions between all classes of vehicles and pedestrians. In the present study, 272 and 158 vehicle–pedestrian interactions on the Urban Road and the National Highway respectively are considered. Total number of fatal interactions are calculated based on vehicular speeds involved in the vehicle–pedestrian interactions as per Speed Concepts: Informational Guide by the Federal Highway Administration.
From Table 8, it can be concluded that the chances of pedestrians being involved in fatal accidents on NH are 4.5 times higher than on the Urban road as the number of vehicles with speed greater than 65 km/h is higher in the case of NH. The number of vehicles with a speed lower than 35 km/h is more in the case of Urban roads. So, the Urban road has a lower risk with less Fatality Risk Index when compared to NH.
6 Conclusion and Way Forward
This paper includes a comparative study of vehicle–pedestrian interactions on an Urban Road and an NH. The conclusions and recommendations are based on the speed and safety analysis by introducing specific useful parameters and a risk index that give reasonable insights about the present study.
The Conclusions made from the study are as follows:
-
(1)
It is found that there is a significant difference between the speeds of vehicles on Urban Road and NH, which further yielded that the 15th percentile speed of 2W on Urban Road is 43.31% lower than that on the NH while the 98th percentile speed of Car on Urban Road is 34.89% lower than that on NH.
-
(2)
Based on the 85th percentile speed, it is deduced that the drivers are 59.32% more aggressive on Urban Road than on NH.
-
(3)
From the CDFs, it was concluded that the variation in the speeds of HV is high compared to other vehicle classes. It is then validated using the term Variability Index which resulted that HV was possessing a greater Variability Index with NH having 18.05% less variability than that on the Urban Road.
-
(4)
Pedestrians maintain a mean TTC of 0–1 s on the Urban Road as the vehicular speeds are less, while it is 2–4 s in the case of NH as the vehicular speeds are high on the NH and pedestrians act more cautious while traversing on NH.
-
(5)
Chances of accidents are high on Urban Roads as the TTC values observed are lower, but the severity will be less, and the fatality rate will also be lower. But as the speeds observed for NH are high, thus the chances of meeting a fatal accident are higher at NH. Thus, NH can be said to be riskier than the Urban road.
The study’s future scope includes a comparison of vehicle–pedestrian interactions on expressways and the formulation of policies that can be used for the development of pedestrian-friendly infrastructure in order to lower the number of fatal accidents resulting from such interactions.
References
Ministry of Road Transportation and Highways: Road Accidents in India 2020 (2022)
De Ceunynck T (2017) Defining and applying surrogate safety measures and behavioural indicators through site-based observations
Golakiya HD, Chauhan R, Dhamaniya A (2020) Mapping pedestrian-vehicle behavior at urban undesignated mid-block crossings under mixed traffic environment—A trajectory-based approach. Transp Res Procedia 48:1263–1277. https://doi.org/10.1016/j.trpro.2020.08.148
Chen P, Zeng W, Yu G, Wang Y (2017) Surrogate safety analysis of pedestrian-vehicle conflict at intersections using unmanned aerial vehicle videos. J Adv Transp. https://doi.org/10.1155/2017/5202150
Golakiya HD, Chauhan R, Dhamaniya A (2020) Evaluating safe distance for pedestrians on urban midblock sections using trajectory plots. Eur Transp 2015:1–17
Vasudevan V, Agarwala R, Tiwari A (2022) LiDAR-based vehicle-pedestrian interaction study on midblock crossing using trajectory-based modified post-encroachment time. Transp Res Rec J Transp Res Board 2676:036119812210832. https://doi.org/10.1177/03611981221083295
Govinda L, Sai Kiran Raju MR, Ravi Shankar KVR (2022) Pedestrian-vehicle interaction severity level assessment at uncontrolled intersections using machine learning algorithms. Saf Sci 153:105806. https://doi.org/10.1016/j.ssci.2022.105806
Amini RE, Yang K, Antoniou C (2022) Development of a conflict risk evaluation model to assess pedestrian safety in interaction with vehicles. Accid Anal Prev 175:106773. https://doi.org/10.1016/j.aap.2022.106773
Golakiya HD, Dhamaniya A (2021) Reexamining pedestrian crossing warrants based on vehicular delay at urban arterial midblock sections under mixed traffic conditions. J Transp Eng Part A Syst 147:1–18. https://doi.org/10.1061/jtepbs.0000538
Groot K (2018) WHO—Global Status on Road Safety
Transport Research Wing G. of I (2020) Road Accidents in India 2019. Ministry of Road Transportation and HighwaysResearch Wing
MoRTH: Road Accidents in India (2020)
Chauhan R, Dhamaniya A, Arkatkar S (2021) Spatiotemporal variation of rear-end conflicts at signalized intersections under disordered traffic conditions. J Transp Eng Part A Syst 147:14. https://doi.org/10.1061/jtepbs.0000589
Xing L, He J, Abdel-Aty M, Cai Q, Li Y, Zheng O (2019) Examining traffic conflicts of up stream toll plaza area using vehicles’ trajectory data. Accid Anal Prev 125:174–187. https://doi.org/10.1016/j.aap.2019.01.034
Cvitanic D (2020) Drone applications in transportation. In: 2020 5th international conference on smart sustainable technologies split 2020. https://doi.org/10.23919/SpliTech49282.2020.9243807
Van Lint JWC, Van Zuylen HJ (2005) Monitoring and predicting freeway travel time reliability: using width and skew of day-to-day travel time distribution. Transp Res Rec 54–62. https://doi.org/10.3141/1917-07
Dey PP, Chandra S, Gangopadhaya S (2006) Speed distribution curves under mixed traffic conditions. J Transp Eng 132:475–481. https://doi.org/10.1061/(ASCE)0733-947X(2006)132:6(475)
Donnell ET, Himes SC, Mahoney KM, Porter RJ, McGee H (2009) Speed concepts: informational guide, vol 59
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Chouhan, R., Shah, A., Dalal, R., Modi, J., Dhamaniya, A., Bari, C. (2024). Comparative Safety Assessment of Vehicle–Pedestrian Interactions at Urban Arterial and Highway Using UAV Data. In: Dhamaniya, A., Chand, S., Ghosh, I. (eds) Recent Advances in Traffic Engineering. RATE 2022. Lecture Notes in Civil Engineering, vol 377. Springer, Singapore. https://doi.org/10.1007/978-981-99-4464-4_14
Download citation
DOI: https://doi.org/10.1007/978-981-99-4464-4_14
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-4463-7
Online ISBN: 978-981-99-4464-4
eBook Packages: EngineeringEngineering (R0)