
Abstract
Saturation flow is an essential component in the design and capacity estimation of signalized intersections. The saturation flow rate is influenced by several factors, including intersection geometry, speed limit, the proportion of heavy vehicles, parking activities, bus stops adjacent to the intersection area, lane utilization, pedestrian volume, etc. Estimation of saturation flow is well-established for homogeneous traffic conditions. However, measuring and modelling saturation flow are challenging in mixed traffic conditions due to the non-lane-based traffic flow and the presence of multiple types of vehicles. Typically, Passenger Car Unit (PCU) adopted should be enough to account for the variation among the vehicles that constitute the queue while estimating saturation flow. However, field observation at Indian intersections indicated that the vehicles at the front of the queue might profoundly influence the queue discharge at the onset of green phase, thereby exposing the shortcoming of PCUs. This influence is clearly visible when heavy vehicles make up the front of the queue and owing to their inferior operational performance and larger size, they deny the following vehicles the opportunity to attain their desired acceleration. To investigate this, the present study simulated the operation of a typical four-legged signalized intersection in VISSIM software. The subsequent analysis revealed a strong relationship between leaders of the queue and the saturation flow of the approach. This result from the simulation was then verified based on field data. The study concluded that the PCU factors adopted at signalized intersections fail to account for the effect of the queue leader’s composition, which has a marked influence on the saturation flow.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Signalized intersections are one of the integral elements of an urban road network, and an efficient design is essential to improve the overall traffic flow across the network. Saturation flow is the most basic parameter that governs the capacity of a signalized intersection. However, estimating saturation flow based on field measurements is often time-consuming and tedious. Further, many developing nations are facing difficulties in providing efficient vehicular traffic operations due to the mixed nature of traffic. Several types of vehicles operate on the same carriageway width without any physical segregation between motorized and non-motorized vehicles, and these operate without proper lane discipline. Despite these difficulties, it is essential to estimate the saturation flow accurately to design signalized intersections properly.
The rapid increases in traffic volume, poor lane discipline, and the introduction of newer vehicle types alongside older vehicles have warranted a better understanding of traffic flow in developing countries. Signalization is a traffic control strategy to ease the competition at intersections through the cyclical allocation of right-of-way to conflicting traffic streams. However, estimating saturation flow is crucial in designing a signalized intersection. Saturation flow is influenced by a variety of factors like vehicle composition, intersection geometry, driver behaviour, etc. Indo-HCM [1] has recommended a saturation flow model primarily based on homogeneous conditions with limited ability to address heterogeneity. Though the manual provides Passenger Car Units (PCU) for the conversion to equivalent homogeneous conditions, it still fails to address the complete complexity of mixed traffic. Field observations indicated that the positions of different vehicle types within the queue might also impact saturation flow, which Indo-HCM has not considered in the estimation of PCU and saturation flow.
It is seen that the presence of heavy vehicles at the front of the queue often disrupts the flow of streams as these larger sized vehicles perform poorly and denies the overtaking opportunity for trailing vehicles owing to their larger size. This highlights the shortcoming of adopting static PCU values for signalized intersections. This research investigates the effects of the leading vehicles that discharge from a queue at a signalized intersection on the saturation flow. The study models a 4-legged signalized intersection in PTV VISSIM to replicate the traffic characteristics of Indian intersections. A number of cases with varying queue compositions were tested to understand the variation in saturation flows. The data collected from one of the signalized intersections were used to verify the existence of a similar relationship in the field.
2 Background and Literature
To formulate the need and objective of the current study, a detailed survey of previous literature was performed to discuss the saturation flow estimation for heterogeneous traffic conditions. This study used traffic microsimulation software, PTV VISSIM, for simulation. Hence, the literature that used VISSIM for traffic simulation in mixed traffic conditions was referred to identify and adopt various parameters required for calibrating the traffic model to suit Indian conditions.
The Transport Road Research Laboratory [2] put an approach for calculating saturation flow in the field. The flow corresponding to a steady-moving queue that crosses the stop line is used to estimate the saturation flow. It is assumed that the flow representing the 98th percentile is a saturation flow. Mathew and Radhakrishnan [3] proposed a methodology for describing non-lane-based driving behaviour and calibrating VISSIM for highly heterogeneous traffic at the signalized intersection. Calibration parameters were identified using sensitivity analysis. The optimum values for these parameters were obtained using a genetic algorithm that minimizes the error between the simulated and field delay. Jie et al. [4] investigated the calibration of VISSIM parameters for mixed traffic. A sensitivity study showed that the following VISSIM parameters have a significant impact: desired speed, acceleration, safety distance, and vehicle length. In VISSIM, car-following behaviour based on Wiedemann's design was used. These characteristics explain 37% of the variations in the saturation flow rate.
The effect of different vehicle types on saturation flows at signalized intersections is rather well documented. Chand et al. [5] summarized the significance of PCU values and found PCU values at signalized intersections as highly sensitive to given geometric conditions such as approach width, traffic flow, composition, and stream speed. The study summarized that, except for the PCU of LCV and truck/bus, the dynamic PCU value for all vehicle categories has a negative correlation with the stream speed. During the green phase, it was discovered that the PCU values of cars, two-wheelers, and three-wheelers decrease as stream speed increases. Majhi [6] proposed a field procedure for measuring saturation flow and the effect of typical mixed traffic behaviour at signals. The most important aspect of this study was the presence of a high discharge rate at the start of the green interval, which was caused by zero start-up lost time. In the case of heterogeneous traffic, the movement is haphazard and mostly occurs due to non-lane-based movement by different drivers, but, more importantly, two-wheelers play a pivotal role as they sneak through the traffic and always try to stay ahead of the fleet, causing the discharge rate to be erroneous. Arasan and Vedagiri [7] proposed the model to estimate the saturation flow rate of heterogeneous traffic with the specific goal of investigating the effect of road width on saturation flow measured in PCU per unit width of the road. According to this model, the saturation flow rate per unit width increases marginally as the width of the approach increases. The reason for the increase in saturation flow rate per unit width with increasing approach width may be attributed to the fact that vehicles of heterogeneous traffic with wide variations in overall dimensions can effectively use the road space under saturated conditions as the road width increases.
Sushmitha and Ravishankar [8] developed a model for signalized intersections to provide sequential movements of vehicular traffic from one leg to another leg. This study presented the results of a saturation flow analysis conducted at eight signalized intersections of similar geometry in three different cities in India. According to the model, the saturation flow increases with an increase in green time and the percentage of two-wheelers. At the same time, it decreases with an increase in the percentage of heavy vehicles. Anusha et al. [9] examined how two-wheelers affected the saturation flow rate at signalized intersections. The measurement of saturation flow rate and the percentage of two-wheelers were shown to be strongly correlated. The outcomes demonstrated that the saturation flow determined by the modified HCM equation was more in line with the observed saturation flow values.
Chodur et al. [10] investigated the effect of bad weather on the entry lane capacity. The saturation flow at particular intersection traffic signal cycles was discovered to be a random variable that can be characterized by gamma or normal distribution. The study's findings demonstrate a trustworthy influence of various weather conditions on the saturation flow. Shrestha and Marsini [11] estimated the PCU values for various vehicle categories from a multiple linear regression model developed between the saturated green time and the number of different vehicle types. The PCU value for a vehicle category was determined from the model by taking the ratio of the coefficient corresponding to the subject vehicle type and that of standard cars. Patel and Patel [12] examined the effects of mixed traffic behaviour on PCU and saturation flow. The study examined arrival rate, compositions, and intersection geometry to determine the queue release rate during saturated green times. According to the results of the study, the saturation flow increases as the arrival rate per meter width and the percentage of two-wheelers increase. Nguyen [13] investigated the impact of motorcycles on the heterogeneous traffic flow at signalized intersections. A saturation flow model was created to transform the entire volume into motorbike units. It was discovered that the homogeneous motorbike saturation flow rate in the 3.5 m width is around 11,300 MCU/h, which is more than 5.8 times the homogeneous vehicle flow’s 1900 PCU/h saturation flow rate. Rajgor et al. [14] studied the saturation flow rate by counting the number of cars during the saturated green intervals. The saturation flow model was developed considering three variables: approach width, percentage of cars, and two-wheelers. Saha et al. [15] proposed a formula based on road width, traffic composition, and the proportion of right-turning cars to determine the saturation flow rate in mixed traffic conditions. The number of cars crossing the stop line during the effective green time was divided by the effective green time and multiplied by 3600 to compute the saturation flow rate.
This study looks into a possible relationship that might exist between queue leaders and the saturation flow of the approach. The variation in saturation flow with the type of queue leaders depicts the drawback associated with the static PCU values used for signalized intersections. As the presence of smaller vehicles at the front of the queue may increase the discharge from a signalized approach, having larger vehicles as queue leaders may have a negative impact.
3 VISSIM Model
The study intends to investigate the effect that the presence of smaller and large-sized vehicles has on queue discharge characteristics and saturation flow. This will require the data collected from a number of queues having varying shares of different types of vehicles at the front of the queue. However, capturing such conditions with different queue compositions in the field is difficult and rarely feasible. Hence, this study used VISSIM to simulate the various scenarios to be checked.
This study started by modifying the default parameters in VISSIM to simulate the behaviour of Indian traffic at the signalized intersection. This was done based on inputs from previous studies performed by researchers who investigated Indian traffic. In VISSIM, the vehicles were allowed to take any position on the lane, and diamond queuing was enabled. The values of each vehicle category's speed distribution were chosen to ensure the curve follows an ‘S’ shape. Based on previous literature [2] that calibrated VISSIM for Indian conditions, the minimum and desired acceleration and deceleration functions were designed to be similar to those of Indian vehicle categories. Further, the following aspects were also modified to replicate Indian mixed traffic conditions such as vehicle class and dimensions (length and width), desired speed distribution, acceleration and deceleration functions, and driving behaviour.
The Wiedemann-74 car model was chosen as the driving behaviour for signalized intersections, as it falls into the category of an interrupted facility. The heterogeneous traffic condition was simulated by modifying the parameters in VISSIM based on previously calibrated values. The study [2] recommended 1.33 m as the average standstill distance and additive and multiplicative components of 0.28 and 0.16, respectively. In the model, the minimum lateral distances were set to 0.3 m and 0.42 m for speeds of 0 kmph and 50 kmph, respectively.
4 Network Design of Signalized Intersections
A four-legged signalized intersection was created in VISSIM, with all the approaches having a four-lane divided configuration, as shown in Fig. 1.

Four-legged signalized intersection created in VISSIM
The signal consists of four main signal groups and eight signal heads, with two signal heads for each approach. A signal cycle time of 120 s was considered for each approach, with an amber time of 2 s and a lost time of 4 s, such that the effective green time for each approach is set to 22 s. The data collection points are strategically placed next to the stop line, and the simulation was performed for 60 min following a warmup period of 120 s. The traffic inputs were set high to ensure that the approaches were saturated throughout the simulation runs. The dimensions of vehicles and their composition used as input in the created network are given in Table 1.
5 Model Simulation
The default values of all parameters in the VISSIM model for mixed traffic were substituted with previously calibrated values [2]. To ensure stochasticity, simulations were run for random seeds 42, 44, 46, and 50 to investigate the various effects on saturation flow. All of the approaches were loaded with high-traffic inputs in VISSIM so that they were completely saturated throughout the simulation period. To achieve a stable queue of vehicles, a start-up lost time of 4 s was considered for each green phase. PCU conversion factors were taken directly from the Indian Highway Capacity Manual [1]. Turning traffic from each approach forming the intersection was varied during the simulation runs. Various proportions of left-turn, straight-turn, and right-turn combinations of vehicles from each approach were permitted at the same time.
6 Analysis of Simulation Results
The results of simulation runs were obtained in the form of mer files from the VISSIM software. These files were opened in MS Excel, and vehicles were counted by filtering the data for each approach during each cycle's effective green time. The vehicle counts were then converted into equivalent passenger car units, and the saturation flow for each signal cycle time was calculated using Eq. 1:
where S = Saturation Flow in PCU per hour, Ni = Number of Vehicles of type ‘i’, Pi = Passenger Car Unit of the vehicle type ‘i’, and gi = Effective Green Time (in seconds).
The saturation flow was calculated from the output of VISSIM simulation using Eq. (1) and with PCU value from Indo-HCM. The saturation flows computed for different queues revealed a significant variation despite converting to the equivalent number of passenger cars. This might be due to the deficiency of the static PCU values given in Indo-HCM that fails to consider the condition present in the field, which might be the composition of the vehicles in front of the queue.
7 Investigating the Effect of Leaders of Queue on Discharge from Approach
The main objective of the study was to investigate the effect of leaders of the queue on the saturation flow of the approach. However, owing to the presence of a wide variety of vehicle types in the traffic mix, it will be difficult to derive sufficient samples of each vehicle type at the front of the queue. Hence, all the vehicles were broadly divided into three categories: Small Vehicles (SV), Medium Vehicles (MV), and Large Vehicles (LV). Motorized Two-Wheelers (2w) and Motorized Three-Wheelers (3w) were considered as Small Vehicles, while Cars were included in the Medium Vehicle category. Due to their size, Buses, Light Commercial Vehicles (LCV), and Heavy Commercial Vehicles (HCV) were included in the Large Vehicle Category. Analysis of the VISSIM output indicated a large variation in the values of saturation flow across different cycles for the same approach. This indicated the effect of some unaccounted factors that are causing the variation. As the geometric and control conditions at the intersection were unaltered, it must be the composition of the queues that resulted in the variation of saturation flow.
The leaders of the queue were identified as the first 10 vehicles that crossed the stop line of the intersection. Since the approaches had 2 lanes, the first 5 vehicles crossing the stop line respectively from each of the lanes were identified and classified into the three categories as mentioned earlier. Then, the saturation flow was estimated for each of the approaches for different cycles and was plotted against the number of vehicles of each class that constituted the leaders of the queue. These are presented in Fig. 2. The plots depict a linear trend between saturation flow and the number of SV, MV, and LV as the leaders of the queue. However, it can also be observed that while the graph for HV has a negative slope (in Fig. 2c), SV and MV have a positive slope. This indicates that as more number of HV are present at the front of the queue, the overall saturation flow drops. Further, the slope of the trend line corresponding to SV is relatively higher than that of MV, indicating that a higher proportion of SV as the leader will increase the overall saturation flow than MV.

Variation in saturation flow with various compositions of queue leaders
Thus, through simulation in VISSIM, it is established that the presence of HV at the front of the queue dissipating from an approach negatively influences the saturation flow. But when a greater number of SV and MV constitute the leaders of the queue, the saturation flow increases. Hence, it could be inferred that the composition of the front of the queue significantly affects the saturation flow of the approach. However, these deductions were made based on the simulations in VISSIM that was calibrated for Indian traffic; hence, it is essential to see if the same holds good for data collected in the field. The following section describes the collection and analysis of field data.
8 Field Data Analysis
Shivaji Chowk intersection in Mumbai is a signalized intersection with four approach arms intersecting at right angles. Video data were collected at this intersection as a part of the CSIR-funded project on Developing the Indian Highway Capacity Manual. Each of the approaches had different widths ranging from 8 to 10 m. All of the approaches to the intersection had no gradient, with the least amount of interference to traffic entering or exiting due to pedestrians, bus stops, and parked vehicles. Figure 3 shows two of the approaches to the Shivaji Chowk intersection. Some steps are considered for field data extraction:

Signalized intersection at Shivaji Chowk, Mumbai
-
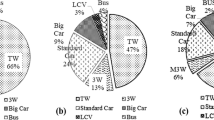
Data from the recorded video were manually extracted for each signal cycle during each green phase of the approach. They were categorized into six: Motorized Two-Wheeler (2w), Three-Wheeler (3w), Car, Light Commercial Vehicle (LCV), Bus, and Heavy Commercial Vehicle (HCVs—including all regular Goods Vehicles).
-
Only those signal cycles with substantial vehicle queuing were considered for data collection. The time for dissipation of the queue was measured after 4 s from the onset of green (start-up lost time) till the time when the queue completely dissipates or the end of green time, whichever occurs first.
-
The composition of the queue, as well as starting 10 vehicles of the queue for each of the signal cycles, was noted.
-
The available data were collected during the morning and evening, respectively, from 8:00 a.m. to 12:00 p.m. and 2:00 p.m. to 6:00 p.m. The approach width of the Shivaji Chowk intersection was 8.8 m and had a green time of 30 s.
As traffic flow is very heavy during peak hours, all of the approaches to the intersections function in near-saturated conditions. Traffic data was extracted from recorded video manually for each green phase of the approach, and the vehicles that constituted the leaders of the queue were categorized into SV, MV, and LV as adopted for the analysis of simulated data. The vehicles that constituted the queue were counted after omitting the initial 4 s (as start-up lost time) of green interval till the instant when the queue completely dissipates or the end of green time, whichever occurs earlier. This was used to estimate the saturation flow rate and to find the composition of the leaders of the queue. As discussed in the previous section, a similar analysis was performed between saturation flow and the number of vehicles that constitutes the leaders of the queue, and the results are presented in Fig. 4.

Variation in saturation flow with the composition of queue leaders at Shivaji Chowk
The plot above depicts the trends for all three vehicle classes at Shivaji Chowk, and these trends are similar to that of the simulated data (Fig. 2). In Fig. 4a, the slope of the trend line for SV was positive, indicating that when there are more small vehicles at the front of the queue, the queue dissipates quickly. In contrast, when large vehicles are present at the front of the queue, it dissipates slowly, as shown by the negative slope of Fig. 4c. The plot for medium vehicles also showed an increasing trend, but its slope was relatively flat compared to the one for small vehicles. Thus, it could be confirmed that the composition of vehicles at the front of the queue definitely impacts the saturation flow estimated for the approach. This clearly shows that the static PCU values normally adopted for signalized intersections are inadequate to capture the effect of queue leaders on the saturation flow.
9 Conclusions
The estimation of saturation flow is one of the foremost steps in the capacity analysis of signalized intersections. Researchers have considered a number of factors that potentially affect saturation flow. However, observing the manner in which a queue of vehicles dissipates from an approach of signalized intersection indicated that the leaders of the queue have a potential impact on the saturation flow. This was not considered in any of the previous research, as it would have been assumed that the use of PCU for conversion to equivalent homogeneous traffic would have nullified the presence of different types of vehicles at the head of the queue. This is the research gap being investigated in this study.
The research initially simulated the operation of a typical signalized intersection in India. PTV VISSIM was used to perform the simulation by adopting the calibrated values of various parameters from previous research. The first ten vehicles of the approach were considered as the leaders of the queue, and the vehicles were broadly classified into Small, Medium, and Large Vehicles based on their sizes. The saturation flow was computed in terms of PCU/h by measuring the vehicles crossing the stop line during the effective green period and using the PCU factors given in Indo-HCM. However, it was found that the saturation flows varied across the cycle for the same approach, indicating that some unaccounted factors affect the saturation flow. This factor must be the composition of the queue, as the rest of the likely parameters that tend to affect saturation flow were kept constant.
Using the output of the VISSIM simulation, the variations in saturation flows were plotted against the number of the three classes of vehicles as leaders of the queue. It was established that as the number of small vehicles at the front of the queue increased, there was also a substantial increase in the saturation flow. The slope of the trend line depicted an increasing trend, indicating when more number of small vehicles are present at the head of the queue, the queue dissipates quickly. In contrast, a similar plot for large vehicles exhibited a declining trend. This indicated that if large-sized vehicles are present at the front of the queue, the queue dissipates very slowly. This may be due to the poor acceleration characteristics of large vehicles compared to other vehicles in the queue, causing the delay for the following vehicles as they have limited opportunity to overtake. This further reduces the saturation flow value. The plot for medium vehicles also showed an increasing trend, but its slope was less steep than that of small vehicles. Analysis of data collected from the field on a signalized intersection of similar geometry also indicated a similar trend, indicating the effect of queue composition on saturation flow.
According to this analysis, a higher percentage of two-wheelers occupied narrow gaps during the formation of the queue, increasing the saturation flow rate. On the contrary, large vehicles occupied wider space across the approach width during the queue formation, decreasing the saturation flow rate. All of these indicate the deficiency of static PCU factors to account for the variation in saturation flow as per the leader’s composition. Future research will explore how the PCU factors could be modified and propose an adjustment factor for saturation flow estimation to account for the impact of leading vehicles on saturation flow.
References
Indian Highway Capacity Manual (Indo-HCM) (2017) Council of Scientific and Industrial Research (CSIR), New Delhi
A Method of Measuring Saturation Flow at Traffic Signals (1963) Transport and Road Research Laboratory, Road Note No. 34, London
Mathew TV, Radhakrishnan P (2010) Calibration of microsimulation models for nonlane-based heterogeneous traffic at signalized intersections. J Urban Plan Dev 136(1):59–66
Li J, Zheng F, Van Zuylenb H, Lu S (2011) Calibration of a microsimulation program for a Chinese city. Procedia Soc Behav Sci 20:263–272
Chand S, Gupta NJ, Velmurugan S (2017) Development of saturation flow model at signalized intersection for heterogeneous traffic. Transp Res Procedia 25:1662–1671
Majhi RC (2017) Field saturation flow measurement using dynamic passenger car unit under mixed traffic condition. Int J Traffic Transp Eng 7(4):475–486
Arasan VT, Vedagiri P (2006) Estimation of saturation flow of heterogeneous traffic using computer simulation. In: 20th European conference on modelling and simulation (ECMC), vol 9553018, pp 7–15
Ramireddy S, Ravishankar KVR (2019) Effect of vehicle composition on saturation flow at signalized intersections in mixed traffic conditions. In: World Congress for Transport Research (WCTR), pp 647–656
Anusha CS, Verma A, Kavitha G (2013) Effects of two wheelers on saturation flow at signalized intersections in developing countries. J Transp Eng 139(5):448–457
Chodur J, Olstrowski K, Tracz M (2016) Variability of capacity and traffic performance at urban and rural signalized intersections. Transp. Res. Procedia 15:87–99
Shrestha S, Marsini A (2014) Development of saturation flow and delay model at signalized intersection of Kathmandu. In: Proceedings of IOE graduate conference Kathmandu, Nepal
Patel N, Patel SG (2012) Capacity analysis of signalized intersections by use of saturation flow rate under mixed traffic conditions. PariPex—Indian J Res 7:33–35
Nguyen HD (2016) Saturation flow rate analysis at signalized intersections for mixed traffic conditions in motor cycle dependent cities. Transp Res Procedia 15:694–708
Rajgor TB, Patel AK, Gundaliya PJ (2016) Development of saturation rate model for heterogeneous traffic at urban signalized intersection. Int J Innov Res Technol 12:151–155
Saha A, Ghosh I, Chandra S (2017) Saturation flow estimation at signalized intersections under mixed traffic conditions. WIT Trans Built Environ 387–393. ISSN 1743-3509
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kumar, R., Mohan, M. (2024). Impact of Leading Vehicles of the Queue on Saturation Flow at Signalized Intersections. In: Dhamaniya, A., Chand, S., Ghosh, I. (eds) Recent Advances in Traffic Engineering. RATE 2022. Lecture Notes in Civil Engineering, vol 377. Springer, Singapore. https://doi.org/10.1007/978-981-99-4464-4_13
Download citation
DOI: https://doi.org/10.1007/978-981-99-4464-4_13
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-4463-7
Online ISBN: 978-981-99-4464-4
eBook Packages: EngineeringEngineering (R0)