
Abstract
From a safety and capacity perspective, road transit is a crucial means of transportation. It is one of the difficult components to comprehend the performance of the road network, especially in terms of efficiency and safety on the roads. The need for road transportation is very high because of a constant increase in traffic demand. Road maintenance and construction activities are fairly prevalent and produce a variety of work-zones. Work-Zone of any road is critical from both safety and capacity points of view. Work-Zone safety-related issues are very critical from both operation and maintenance points of view. Work-Zone geometry has a significant effect on both traffic safety and capacity. Various work-zone geometric parameters are length of work-zone, lane-drops of work-zone and tapering length of work-zone. The research paper studies the effect of variation in the geometric parameters of the work-zone on traffic safety using a simulation approach. The research paper studies the geometric parameter variation of work-zone on traffic safety at the microscopic level using various microscopic parameters such as box and whisker plots, descriptive statistics, trajectories, hysteresis plots and conflict probability.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Since everyone is either directly or indirectly connected to road transportation, it performs a crucial role for all people. It is one of the difficult components to comprehend the performance of the road network, especially when looking at road efficiency and safety. Traffic in developing nations like India is diverse, which leads to accidents of various severity. As a result, traffic safety is becoming increasingly important in daily life. Therefore, it is important to research traffic safety in both the WZ and WWZ sections under a variety of highway conditions. A work-zone (WZ) is an area where there are road construction activities taking place that involve lane closures, detours and moving equipment (IRC SP: 55). Depending on the state of the roadways, different sections of the highway may not be as safe for traffic. In India, WZ collisions and confrontations happen frequently. In a nation like India, work on WZ traffic safety is really minimal. Studying transportation safety at both the macroscopic and microscopic levels is therefore crucial. As a result, for both the WWZ and WZ sections, traffic safety is examined at both the macroscopic and microscopic traffic levels in this study.
2 Literature Review
The prevalence and characteristics of crashes at various WZ were researched by Garber et al. [1]. Five WZ locations—advance warning, transition, longitudinal buffer, activity and termination—were used to analyse crashes. The proportionality test was performed to identify significant differences at the 5% significance level at various WZ locations. The findings show that, regardless of the type of highway, the activity area is the crucial site for WZ crashes, and rear-end collisions are the most common crash type. The findings also show that there are much more sideswipe-in-the-same-direction crashes in the transition region than in the warning area. Zheng et al. [2] concluded that traffic safety for rear-end collision could be computed using conflict probability using the GEV distribution of TTC and DRAC. The method incorporates traffic conflicts from various locations and times to create a consistent generalized extreme value (GEV) model for estimating the treatment effect. A hierarchical Bayesian framework also accommodates unobserved heterogeneity between different sites by connecting potential factors to GEV parameters. Miller et al. [3] studied the safety of construction WZ during night-time. He has developed various threshold levels for operating speed on rods. The threshold level involves the average speed of different categories of vehicles with standard deviation. Wang et al. [4] studied rear-end conflicts at various intersections. He found that rear-end conflicts are the most common accident type at signalized intersections. The rear-end accident probability is dependent upon the aggressive type. The aggressive type is high risk followed by conservative, followed by normal. Tarko et al. [5] justified the Lomax distribution to predict the crash probability for given critical conflicts. The maximum likelihood estimate (MLE) method and the probability-weighted moment's method calculate the crash probability. The above study finally found that the threshold value for Time to Collision calculates the number of crashes on the field. Guo et al. [6] studied variables at motorway diverge locations that affect crash rates by collision type. For the purpose of safety modelling, the author created a novel random parameter multivariate Tobit model. The effects of risk factors on various collision types were estimated to have separate effects after taking into account the correlation between collision types and unobserved heterogeneity across observations.
3 Methodology
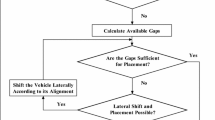
Figure 1 describes the methodology of the study in a detailed manner.

Descriptive methodology of the study
4 Analysis and Results
This section is divided into three types which are Box and Whisker plots, Trajectories and Conflict Probability.
4.1 Box and Whisker Plots
Box and Whisker plots of Following Time (FT) are studied at the microscopic level. Taper-wise, Length-wise and Lane-drop-wise box and whisker plots are drawn and shown in Fig. 2. It is found from the figure that the following time increases with an increase in the rate of taper. As the following time of the section is less, there are more chances of conflicts and crashes. Hence, there are more conflicts and crashes with less tapering length. The number of conflicts and crashes increases with an increase in the tapering length of the section. It is found from the figure that the following time increases with an increase in the length of the work-zone. Hence, it is found that the number of conflicts and crashes increases with an increase in the number of work-zone lengths. It is found from the figure that the following time decreases with an increase in the number of lane-drops. As the following time of the section is less, there are more chances of conflicts and crashes. Hence, there are more conflicts and crashes with an increase in the lane-drops of the section.

Taper-wise, lane-drop-wise and length-wise box and whisker plots of following time (FT)
4.2 Trajectories
Traffic Behaviour at the microscopic level is studied by using the microscopic analysis. Length-wise, Taper-wise and Lane-drop-wise trajectories are plotted at the microscopic level.
Figure 3 shows the trajectories for various lane-drops, tapers and lengths of a work-zone. It is found from the figure that vehicles are closely spaced with each other both laterally and longitudinally for 2 and 3 lane-drops than 1 lane-drop. It is found from the figure that vehicles are closely placed with each other with less tapering rate of the work-zone. As the rate of taper increases, vehicles are separated from each other in both lateral and longitudinal directions. It is found from the figure that vehicles are closely placed with each other for a small length of the work-zone. As the length of the work-zone increases, vehicles separate each other laterally and longitudinally. Hence, it is proved that as the length of the work-zone increases, then there is a reduction in the number of conflicts and crashes.

Trajectories for various lane-drops, tapers and lengths of work-zone
4.3 Conflict Probability
Table 1 shows the length-wise conflict probability for different volumes. It is found from Table 1 that conflict probability decreases with increases in the length of the work-zone. It is also found from the table that conflict probability for High volume is greater than for Medium and Low volumes.
5 Conclusion
The following are important conclusions that are drawn from the given study:
-
(I)
There is an effect of geometric parameters of the work-zone on traffic safety at the microscopic level.
-
(II)
Trajectories have a greater effect on the work-zone geometry of the section. Trajectories are closely placed with each other with respect to both lateral and longitudinal directions for 2 and 3 lane-drops as compared to 1-lane-drop. Trajectories are closely placed with each other both laterally and longitudinally with decreasing rates of taper. Trajectories are closely placed with each other both laterally and longitudinally with decreasing length of taper.
-
(III)
Conflict probability increases with an increase in the lane-drop for all types of volume. Conflict probability decreases with an increase in the rate of taper and conflict probability decreases with an increase in the length of the work-zone.
References
Garber NJ, Zhao M (2002) Distribution and characteristics of crashes at different work zone locations in Virginia. Transp Res Rec 1794(1):19–25
Zheng L, Sayed T, Essa M (2019) Validating the bivariate extreme value modelling approach for road safety estimation with different traffic conflict indicators. Accid Anal Prev 123:314–323
Miller L, Mannering F, Abraham DM (2009) Effectiveness of speed control measures on night-time construction and maintenance projects. J Constr Eng Manag 135(7):614–619
Wang W, Li Y, Lu J, Li Y, Wan Q (2019) Estimating rear-end accident probabilities with different driving tendencies at signalized intersections in China. J Adv Transp
Tarko AP (2018) Estimating the expected number of crashes with traffic conflicts and the Lomax distribution—A theoretical and numerical exploration. Accid Anal Prev 113:63–73
Guo Y, Li Z, Liu P, Wu Y (2019) Modeling correlation and heterogeneity in crash rates by collision types using full Bayesian random parameters multivariate Tobit model. Accid Anal Prev 128:164–174
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Bidkar, O., Arkatkar, S., Joshi, G., Easa, S.M. (2024). Study on the Effect of Variation in the Geometric Parameters of the Work-Zone on Traffic Safety Using the Simulation Approach. In: Dhamaniya, A., Chand, S., Ghosh, I. (eds) Recent Advances in Traffic Engineering. RATE 2022. Lecture Notes in Civil Engineering, vol 377. Springer, Singapore. https://doi.org/10.1007/978-981-99-4464-4_11
Download citation
DOI: https://doi.org/10.1007/978-981-99-4464-4_11
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-4463-7
Online ISBN: 978-981-99-4464-4
eBook Packages: EngineeringEngineering (R0)