
Abstract
Autonomous vehicles are projected to be the future of the automotive industry. Photonic radars have emerged as one of the most reliable sensors in the development of self-driving automobiles. The effect of different degrading conditions such as atmospheric turbulence and impact material surface in the target recognition by photonic radar is analyzed in this work. For simplicity, we have considered four scenarios in which the target has turbulence in terms of atmospheric attenuation and reflectivity of the surface, while two scenarios of the scintillation effect are studied. With an operating range of 250 m and attenuation up to 75 dB/km, the reported results show successful detection of the target.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
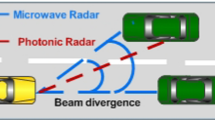
Sensor based upon the optical signals has proved to be diverse and found their applications in various sectors be it autonomous vehicles or geography sensing, land mass observation, aerial navigation and subaquatic fluxes [1, 2]. It is expected in the automotive sector which will grow with 31% of CAGR in 2021–2028 period, particularly in autonomous vehicle’s (AV’s) sector [3]. Key demand of autonomous sector is higher resolution-based system to detect and range stationary or moving objects with high degree of accuracy in all weather conditions [4, 5]. Furthermore, the AVs need high-security provisions for redundant and shared measurements. However, under varying weather conditions, exact measurements of road conditions become tedious job. Primary requirement for AVs is dependent upon a sensory system that is proficient of providing accurate measurement particularly up to 500 m with high resolution. Likewise, power requirement should also be minimized particularly below 20W as limited power is available from car batteries. Many sensors have been deployed in auto motives to gather surrounding conditions such as RADARs, Ultrasonic sensors, LiDAR, Cameras and Photonic radars. Out of these currently used sensors, photonic radar stands to be more reliable and efficient as it offers higher bandwidth that enables better range resolution, low beam divergence, smaller size, low input power requirement and immunity from electromagnetic interference (EMI) [6, 7].
Photonic radar typically utilizes low input power continuous wave (CW) laser source with comparatively extended surveillance duration. The information signal is encoded in triangular format to decrease the sweep duration which is further frequency modulated using RF signal. This FM-modulated signal is exploited to figure the object distance and speed. The FM-modulated RF signal is combined with continuous wave light source using Mach Zander interferometer, and output signal is obtained in form of light. There are two types of configuration used in photonic radars, viz non-coherent or direct detection and coherent detection. Along with transceiver design issues, operating frequency selection is also important as RF poses transmission limit as well as inability in penetrating through dense targets. Also, higher bandwidth enables to attain better angular resolution. To solve this issue, use of millimeter wave band (mm-band) is recommended. On the contrary, higher bandwidth of mm band tends to be affected with higher attenuation with various influences of atmosphere [8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24].
Though AVs are still a growing field of study, many researchers have published considerable reports in this area. Reference [25] reported the impact of suspended particles in air such as smoke and dust on the working of AVs. Another study [26] discussed target simulation discussing irregular reflectivity inconsistencies in atmosphere. Thus, reported work presents impact of atmospheric influences. The photonic radar operates in free space, and hence, various attenuation factors such as rain haze snow and fog must be considered thoroughly while designing the channel modeling. Authors have studied in detail impact of atmospheric effects of free-space optics [11, 16, 17, 27] and proposed various mitigation schemes to lower their impact [28]. Thus, researchers need to consider the atmospheric conditions while designing the system. Frequency band is another important parameter as resolution improves with higher bandwidth [29]. Various configurations of photonic radar using LFMCW techniques are discussed with their advantages [30].
Along with different atmospheric factors such as turbulences and scintillations, effectiveness of photonic radar also depends upon the material reflectivity of different targets. There is limited work reported in finding impacts of attenuation, scintillation and material reflectivity. In this work, we have considered linear FMCW-based photonic radar to analyze the influence of attenuation, scintillation and material reflection altogether on detection of target. Present work is organized as: Sect. 1 designates the introduction of photonic radars and previous work; Sect. 2 explains the system description of the recognized photonic radar; Sect. 3 presents the material impact upon the developed system, and concluding part of this study is given in Sect. 4.
2 System Description
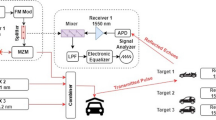
As presented in Fig. 1, basic photonic radar scheme comprises a transmitter where linear frequency modulated (LFM) saw tooth signal and continuous wave source are modulated together using dual-port Mach Zander modulator into the free space toward the target via optical lens.

Block diagram of proposed photonic radar
The operating frequency of LFM generator is 77 GHz and bandwidth for this system is 2 GHz. The range frequency that is frequency of replicated echo from the object is calculated as per Eq. (1):
where distance between object and radar equipped vehicles is given by R, the operational bandwidth of the system is given by B and time taken by the signal to travel from transmitter to object and back to the receiver is given as Tm known as sweep time. Numerous aspects, precisely scattering, propagation under climatic conditions and object material have deteriorating impact on the echo signal. The intensity of the echo signal Pr is calculated as [31]:
where D is the width of the transmitter lens, reflectivity of target is given by ρt, effective area of the target is given by At, Aill is the lit part at target, and τopt and τatm designate transmission and atmospheric loss factors. At the receiver, photodiode has been used to capture the echo signal, and based upon echo signal intensity, corresponding electrical current is generated. Photodiode current with responsivity ℜ is [32]:
Equation (3) is also presented in filtered form as [33]:
where Idc is direct current generated from the photodiode, while isig is alternating current. We have utilized PIN-type photodiode to detect the echo signal having responsitivity of 1 AW−1. The output of PIN diode is analyzer using electrical analyze for evaluation SNRvalues. The SNR is measured as detector as [31]:
where Brx is the receiver bandwidth, q is the electrical charge ≈ 1.6 × 10–19 c, and kb is the Boltzmann constant ≈ 1.38 × 10–23 J/K.
The signal is further subjected to electrical amplifier. We have used amplifier with 40 dB gain, and this amplified signal is mixed with FM-modulated input signal using a mixer. The output of mixer is subjected to the low-pass filter where beat signal is obtained as shown in Eq. (6) [31]:
3 Results and Discussion
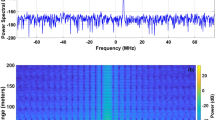
The photonic radar system is designed using OptiSystem™ software. Firstly, the system range frequency is calculated mathematically using Eq. (1). Then, the proposed system is tested firstly for various atmospheric attenuations caused by rain fog snow and haze. For simplicity of the operation, we have considered four values of the attenuation that is 0.2, 25, 50 and 75 dB/km [34, 35]. The reported results as shown in Fig. 2 depicts successful detection of target under varying attenuation with decreasing received power.

Max received power vs. frequency under varying attenuation
It can be observed that range frequency is at 333.33 MHz which is same as calculated using Eq. (1). This testifies that the system detection is theoretically correct. Further, it is clear from Fig. 2 that system withstands the varying attenuation and successfully detected the target. Further, the proposed system is tested for material surface effects in detection of the target. For this, we have considered four scenarios in which material reflectivity is predefined as 15%, 50%, 80% and 99%. The results are shown in Fig. 3.

Max received power versus frequency under varying reflectivity of target material. Ref: Reflectivity of the surface material of target
As shown in Fig. 3, with increasing reflectivity of target surface, the maximum received power also increases. Again range frequency is 333.33 MHz which matches theoretical value. Lastly, the system is detected for impact of scintillation effects. Two scenarios are considered with high scintillation of 10–6 and low scintillation of 10–22.
As shown in Fig. 4, the scintillation has minimal impact of the signal intensity and results obtained in low as well as high scintillations are comparable. Thus, it is reported that from the simulation results, attenuation and material reflectivity have high impact on the performance of photonic radar as compared to the scintillation impact.

Max received power versus frequency under varying scintillation
4 Conclusion
In this work, linear frequency-modulated photonic radar has been modeled in direct detection configuration for range detection of stationary target by analyzing the echo signal. Proposed system has successfully detected the stationary target placed at 250 m. Further impact of attenuation is observed with attenuation of 0.2–75 dB/km, and surface material impact is observed by modeling target having reflectivity of 15%, 50%, 80% and 99%. The reported results show that material reflectivity and attenuation have degrading impact of performance of the photonic radars, while scintillation effects are not severe in autonomous vehicle applications. The performance of the system under varying degrading conditions is tested and verified that system withstands all these conditions with successful detection of the target.
References
Poggio L, Gimona A (2017) Assimilation of optical and radar remote sensing data in 3D mapping of soil properties over large areas. Sci Total Environ 579:1094–1110
Chaudhary S, Wuttisittikulkij L, Saadi M, Sharma A, Al Otaibi S, Nebhen J et al (2021) Coherent detection-based photonic radar for autonomous vehicles under diverse weather conditions. PLoS ONE 16:e0259438
Insights FB. Autonomous car market [Online]. Available: https://www.fortunebusinessinsights.com/industry-reports/autonomous-cars-market-100141
Sharma A, Malhotra J (6 June 2022) Performance enhancement of photonic radar sensor for detecting multiple targets by incorporating mode division multiplexing. Opt Quantum Electron 54:410
Sharma A, Chaudhary S, Malhotra J, Parnianifard A, Wuttisittikulkij L (1 July 2022) Measurement of target range and Doppler shift by incorporating PDM-enabled FMCW-based photonic radar. Optik 262:169191
Sharma A, Chaudhary S, Malhotra J, Saadi M, Otaibi SA, Nebhen J et al (2021) A cost-effective photonic radar under adverse weather conditions for autonomous vehicles by incorporating frequency modulated direct detection scheme. Front Phys 467
Sharma A, Chaudhary S, Malhotra J, Parnianifard A, Kumar S, Wuttisittikulkij L (2022) Impact of bandwidth on range resolution of multiple targets using photonic radar. IEEE Access 10:47618–47627
Chaudhary S, Wuttisittikulkij L, Nebhen J, Tang X, Saadi M, Al Otaibi S et al (7 Sept 2021) Hybrid MDM-PDM based Ro-FSO system for broadband services by incorporating donut modes under diverse weather conditions. Front Phys 9
Chaudhary S, Sharma A, Tang X, Wei X, Sood P (1 Feb 2021) A cost effective 100 Gbps FSO system under the impact of fog by incorporating OCDMA-PDM scheme. Wirel Pers Commun 116:2159–2168
Sharma A, Chaudhary S, Thakur D, Dhasratan V (2020) A cost-effective high-speed radio over fibre system for millimeter wave applications. J Opt Commun 41:177–180
Shakthi Murugan KH, Sharma A, Malhotra J (7 Nov 2020) Performance analysis of 80 Gbps Ro-FSO system by incorporating hybrid WDM-MDM scheme. Opt Quantum Electron 52:505
Chaudhary S, Tang X, Sharma A, Lin B, Wei X, Parmar A (30 April 2019) A cost-effective 100 Gbps SAC-OCDMA–PDM based inter-satellite communication link. Opt Quantum Electron 51:148
Chaudhary S, Sharma A, Singh V (1 Jan 2019) Optimization of high speed and long haul inter-satellite communication link by incorporating differential phase shift key and orthogonal frequency division multiplexing scheme. Optik 176:185–190
Chaudhary S, Kapoor R, Sharma A (1 April 2019) Empirical evaluation of 4 QAM and 4 PSK in OFDM-based inter-satellite communication system. J Opt Commun 40:143–147
Chaudhary S, Chauhan P, Sharma A (2019) High speed 4 × 2.5 Gbps–5 GHz AMI-WDM-RoF transmission system for WLANs. J Opt Commun 40:285–288
Zhou Z, Zhang H, Lin C, Sharma A (2018) Performance analysis of duobinary and CSRZ modulation based polarization interleaving for high-speed WDM-FSO transmission system. J Opt Commun 1
Sood P, Sharma A, Chandni (2018) Analysis of FSO system and its challenges–a review. Int J Comput Appl 179:42–45
Sharma SRA, Rana S (2017) Comprehensive study of radio over fiber with different modulation techniques–a review. Int J Comput Appl 170:22–25
Sharma A, Thakur D (2017) A review on WLANs with radio-over-fiber technology. Int J Electron Commun Eng (IJECE) 6:1–6
Sharma A, Kapoor R (2017) Study of various challenges in is OWC: a review. Int J Res Appl Sci Eng Technol (IJRASET) 5:802–807
Chaudhary S, Sharma A, Chaudhary N (1 Dec 2016) 6 × 20 Gbps hybrid WDM–PI inter-satellite system under the influence of transmitting pointing errors. J Opt Commun 37:375–379
Sharma A, Kumar V, Gupta V. A review on inter-satellite optical wireless communication. Int J Comput Appl 180:13–17
Sharma A, Malhotra J, Chaudhary S, Thappa V (1 Feb 2021) Analysis of 2 × 10 Gbps MDM enabled inter satellite optical wireless communication under the impact of pointing errors. Optik 227:165250
Sharma A, Chauhan P. A study of radio over fiber technology in WLAN applications
Peynot T, Underwood J, Scheding S (2009)Towards reliable perception for unmanned ground vehicles in challenging conditions. In: 2009 IEEE/RSJ international conference on intelligent robots and systems, pp 1170–1176
Rasshofer RH, Spies M, Spies H (2011) Influences of weather phenomena on automotive laser radar systems. Advan Radio Sci 9:49–60
Study of radio over fiber with different coding channel–a review. Int J Comput Appl
Zhang H, Tang X, Lin B, Zhou Z, Lin C, Chaudhary S et al (2019) Performance analysis of FSO system with different modulation schemes over gamma-gamma turbulence channel, vol 11048. SPIE
Zhang F, Gao B, Pan S (2018) Photonics-based MIMO radar with high-resolution and fast detection capability. Opt Express 26:17529–17540
Sharma A, Malhotra J (21 March 2022) Simulative investigation of FMCW based optical photonic radar and its different configurations. Opt Quantum Electron 54:233
Elghandour AH, Ren CD (2013) Modeling and comparative study of various detection techniques for FMCW LIDAR using optisystem. In: International symposium on photoelectronic detection and imaging 2013: laser sensing and imaging and applications, p 890529
Keiser G (2003) Optical communications essentials: McGraw-Hill education
Hui R, O’Sullivan M (2009) Fiber optic measurement techniques. Academic Press
Awan MS, Csurgai-Horváth L, Muhammad SS, Leitgeb E, Nadeem F, Khan MS (2009) Characterization of fog and snow attenuations for free-space optical propagation. JCM 4:533–545
Chaudhary S, Wuttisittikulkij L, Nebhen J, Sharma A, Rodriguez DZ, Kumar S (2022) Terabyte capacity-enabled (10 x 400 Gbps) Is-OWC system for long-haul communication by incorporating dual polarization quadrature phase shift key and mode division multiplexing scheme. PLoS ONE 17:e0265044
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Sharma, A., Malhota, J. (2023). Performance Investigation of Photonic Radar for Autonomous Vehicles’ Application Under Various Degrading Conditions. In: Rani, A., Kumar, B., Shrivastava, V., Bansal, R.C. (eds) Signals, Machines and Automation. SIGMA 2022. Lecture Notes in Electrical Engineering, vol 1023. Springer, Singapore. https://doi.org/10.1007/978-981-99-0969-8_52
Download citation
DOI: https://doi.org/10.1007/978-981-99-0969-8_52
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-0968-1
Online ISBN: 978-981-99-0969-8
eBook Packages: EnergyEnergy (R0)