
Abstract
This paper presents a comparative analysis between two different MPPT algorithms for a 3-stage battery charge controller (BCC) using a standalone system. A DC–DC buck converter is used as a step-down converter. Two different algorithms are used to extract the maximum power from solar PV panel. The maximum power from the solar photovoltaic panel is extracted using a conventional approach of Perturbation and Observation, as well as an intelligent MPPT technique called Fuzzy logic control. A battery charge controller (BCC) is used to charge the battery by using three different stages of the charging strategy. The different stages of charging incorporate Stage1—Bulk charging, Stage2—Absorption charging and Stage3—Float charging stage. The overall performance of the model is measured in terms of MPP tracking, lead-acid battery charging and controller efficiency. The output shows that the MPPT charge controller can track the MPP within 0.5 s regardless of solar irradiation variation. The concept of charging the battery in stages is implemented. The efficiency of the battery charge controller is attained up to 98.86% with a Fuzzy logic controller.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Over the last few years, researchers from all over the world have been working furiously in the renewable energy area to provide clean and eco-friendly energy. Because PV systems depend on sunlight to create electricity, they can only be used during the day when sunlight is present. Therefore, one of the alternatives to store energy is batteries. As a result, the solar photovoltaic charge controller plays a very important role in allowing this solution to be possible. The MPP charge controller for solar photovoltaics is made up of a BCC and an MPP tracker. MPPT controller extracts the maximum amount of power from the solar photovoltaic panel and transfers it to the BCC. The battery is charged using a multi-stage charging process. To avoid damage from excessive charge gassing and overheating issues, this procedure is utilized to charge the battery. In this research paper, MPPT performance is evaluated in terms of tracking time and tracking efficiency with two different MPPT algorithms.
2 Methodology
This model is comprised of a solar photovoltaic panel, a buck converter, a battery and an MPPT charge regulator system. Figure 1 gives an outline of the solar PV MPPT battery charge control system configuration. The block of the MPPT charge control system contains a P&O MPPT algorithm as well as a 3-stage charge regulator for lead-acid batteries. For the implementation of an intelligent technique in solar PV battery charge control system Fuzzy logic is also implemented with 3-stage charge regulators with lead-acid battery. This system configuration is fit to charge a battery of 48 V from the 2-kW solar photovoltaic power source.

MPPT system configuration block diagram
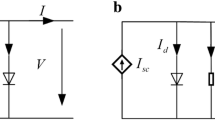
2.1 Solar PV System
The SPV system's efficiency and output power are entirely dependent on PV array configurations and different weather conditions such as sun irradiation and temperature changes. The work in this study is based on a constant temperature of 25 °C and variable solar irradiations of 600–1000 W/m2 (Table 1).
2.2 Buck Converter
A buck converter is used in this model because the voltage of the solar PV panel is higher than the voltage of the battery. Therefore, a buck converter is used to reduce the PV panel's voltage while sustaining power transfer to the battery. The buck converter's design equation can be obtained from Eqs. (1) to (4).
where D represents the buck converter’s duty cycle, Rin represents the input resistance, IL represents the inductor ripple current and VC represents the buck converter's output capacitor voltage (Table 2).
2.3 MPPT Algorithm–Fuzzy Logic Controller
To deal with non-linearity, imprecise input and exact output in an inaccurate system model, an MPPT–FLC is used. A fuzzy logic controller can be designed in three steps. Fuzzification is the initial stage, and it is used to convert crisp input into a linguistic variable. The inference system, which consists of a rule base, is the second step, and defuzzification, which converts the fuzzy output into crisp output, is the third step. Membership functions include Neg. Big (NB), Neg. Medium (NM), Neg. Small (NS), Zero (ZO), Pos. Small (PS), Pos. Medium (PM), and Pos. Big (PB) are used for both input error and change in error (Figs. 2 and 3).

a Input MF dp_dv. b Ouput MF ‘duty cycle’

Fuzzy logic controller rule base
2.4 MPPT Algorithm–Perturb and Observe
Many industrial solar Photovoltaic charge controllers use the P&O MPPT because of the ease with which it can be tracked and implemented. This MPPT algorithm measures the PV array’s maximum power and delivers a duty cycle proportional to that power to the battery charge controller.
3 Results and Discussion
For performance analysis, the maximum power point battery charge regulator for the standalone PV system model was successfully implemented. A user-defined method with variable steps is used to configure the Simulink model. This system configuration is fit to charge a battery of 48 V from a 2-kW solar photovoltaic power source also controlling the charging by utilizing a 3-stage battery charging technique. This model gives the overall efficiency up to 98.86% which is similar to some top-of-the-line business solar photovoltaic maximum power point trackers for charge controllers (Fig. 4).

Block diagram of a battery charge controller with FLC
3.1 Performance of the Solar PV Panel
Figure 5a Shows the comparative analysis between the output current of the PV panel with P&O and FLC-based MPPT algorithm. With FLC smooth DC output current is obtained whereas there is some disruption in output current in P&O.

a The output current of the PV panel with P&O and FLC. b The output voltage of the PV panel with P&O and FLC. c Maximum power of the PV panel with P&O and FLC
Figure 5b Shows the comparative analysis between output voltage obtained from the PV panel with P&O and FLC. In each step, FLC has less oscillations, faster response time and precise tracking as compared with the P&O MPPT algorithm.
Figure 5c Shows the comparison b/w maximum output power obtained from the PV panel. Both P&O and FLC MPPT effectively track the maximum power as shown in Fig. 5c. A fuzzy logic controller must be chosen over the P&O controller for practical application because of its superior performance. As a result, the FLC has higher performance and is closer to the P&O.
3.2 Performance of the Lead/Acid Battery
Figure 6a shows the battery’s output current with P&O and FLC MPPT algorithm. With FLC smooth DC output current is obtained whereas with P&O there is a lot of oscillations in output current is obtained.

a Battery’s output current with P&O and FLC. b Battery’s output voltage with P&O and FLC. c SOC of the battery with P&O and FLC
Figure 6b shows the comparative analysis between output voltage of the battery with P&O and FLC MPPT algorithm.
Figure 6c shows the comparison between SOC of the battery. SOC obtained with FLC is higher than the SOC obtained from the P&O MPPT algorithm (Table 3).
4 Conclusion
In this paper, a complete simulation for a solar photovoltaic MPPT charge regulator model is carried out effectively in MATLAB. This accomplished the overall efficiency up to 98.86% which is similar to some top-of-the-line business solar photovoltaic Simulink. A fuzzy logic technique-based MPPT controller, P&O-based MPPT tracking algorithm, DC–DC step-down converter and 3-stage battery charge regulator are demonstrated. This system configuration is fit to charge a battery of 48 V from a 2-kW solar photovoltaic power source also controlling the charging by utilizing a 3-stage battery charging technique with maximum power point trackers for charge controllers. This MATLAB-Simulink system model introduced can be easily modified to match the needs of any modern Maximum power point charge controller having a similar configuration. According to the simulation, the PV system can give the maximum power with both MPPT controllers. Fuzzy MPPT, on the other hand, outperforms standard controllers when it comes to nonlinear systems. When MPP is detected, it has the capacity to reduce perturbed voltage. In contrast to the traditional MPPT, where the output power fluctuates about MPP, this activity saves a more consistent outcome power.
References
Tripathi S, Shrivastav A (2020) Fuzzy logic controller based solar MPPT and battery charging for hybrid vehicle application. AIP Conf Proc
Rodney HGT, Chee Kang E, Solanki1 SG (2020) Modeling of photovoltaic MPPT lead acid battery charge controller for standalone system applications. E3S Web Conf 182:03005
Manisha, Gaur P (2021) The survey of MPPT under non-uniform atmospheric conditions for the photovoltaic generation systems. Int J Inf Technol 13:767–776
Salman S, Al X, Zhouyang W (2018) Design of a P&O algorithm based MPPT charge controller for a stand-alone 200W PV system. Protect Contr Modern Power Syst 3:1–8
Gaur P, Pathak D, Kumar B, Chauhan YK (2016) PI and fuzzy logic controller based tip speed ratio control for smoothening of output power fluctuation in a wind energy conversion system. In: 7th India international conference on power electronics (IICPE)
Tripathi SK, Shrivastava KC (2019) Jana Robust throttle control of hybrid electric vehicle. IOP Conf Ser Mater Sci Eng
Manisha, Gaur P (2018) A review of MPPT techniques for photovoltaic system. IEEE Conf INDIACom
Pathak PK, Yadav AK (2019) Design of battery charging circuit through intelligent MPPT using SPV system
Patil R, Anantwar H (2017) Comparative Analysis of fuzzy-based MPPT for buck and boost converter topologies for PV application
Enany MA, Farahat MA, Nasr A (2016) Modelign and evaluation of main maximum power point tracking algorithms for photovoltaics systems. Renew Sustain Energy Rev 58:1578–1586
Karami N, Moubayed N, Outbib R (2017) General review and classification of different MPPT techniques. Renew Sustain Energy Rev 68:1–18
Mohapatra BN, Dash A, Jarika BP (2017) Power saving solar street lights. Int J Emerg Technol Eng Res 5:105–109
Lopez J, Seleme SI Jr, Donoso PF, Cortizo PC, Severo MA (2016) Digital control strategy for a buck converter operating as a battery charger for stand-alone photovoltaic systems. Sol Energy 140:171–187
Pathak D, Gaur P (2019) A fractional order fuzzy-proportional-integral-derivative based pitch angle controller for a direct-drive wind energy system. Comp Electr Eng 78
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Hussain, A., Manisha (2023). An Intelligent MPPT Technique for a Three-Stage Battery Charge Controller for Standalone System. In: Rani, A., Kumar, B., Shrivastava, V., Bansal, R.C. (eds) Signals, Machines and Automation. SIGMA 2022. Lecture Notes in Electrical Engineering, vol 1023. Springer, Singapore. https://doi.org/10.1007/978-981-99-0969-8_34
Download citation
DOI: https://doi.org/10.1007/978-981-99-0969-8_34
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-0968-1
Online ISBN: 978-981-99-0969-8
eBook Packages: EnergyEnergy (R0)