
Abstract
This paper shows the analysis and modeling of wind-driven permanent magnet synchronous generator. The maximum power is extracted from wind turbine by controlling pitch angle and tip to speed ratio. The modeling of permanent magnet synchronous machine is assessed. Thereafter, healthy and unhealthy analysis of PMSG is assessed. The unhealthy condition is being specified in terms of different faults like LLL, LG. Subsequently, power quality issues like THD and MSE are being analyzed for both the conditions.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Over the years, the wind generator sector has become increasingly popular. Conventional power generators did not reach the megawatts system. As a result, the majority of the early models used permanent magnet synchronous generators (PMSGs) or a common asynchronous generator. A gearbox is usually connecting an asynchronous generator to a turbine. If the generator has a large number of poles, a permanent compatible generator (PMSG) can be connected to a turbine with a gearbox or directly outside the gearbox [1, 2]. Because of the increase in power per megawatt system, which is now up to 10 MW, PMSG changes necessitate an increase in converter size and weight. Permanent magnetic generators with synchronous generators having the advantages of being more durable, smaller in size, requiring no additional power supply to stimulate the magnetic field, and requiring less adjustment than conventional generators. Furthermore, when compared to the constant-speed technique, variable-speed wind power has advantages such as magnitude, the ability to track spots, and reduced acoustic noise at low wind speeds [3, 4]. The modeling and control approaches used in two permanent magnet synchronous generator farms for wind applications are described in this paper. A completely integrated rear-turning converter, consisting of two three-phase capacitors, a central DC bus, and an inverter, is used to link generators to the power grid [5, 6]. The entire system is phase connected to the electrical grid. Maximum power point tracking (MPPT) for PMSG speed control, active power control, and DC bus power management are among the proposed control solutions. Some simulation results are shown and examined using the MATLAB/Simulink programming to demonstrate the effectiveness of control schemes [7, 8].
2 Modeling of Wind Turbine
An aerodynamic model of the wind turbines is a basic part of the dynamic models of the electricity producing wind turbines. Theoretical power generated by the turbine is given by,
where
- P m :
-
mechanical power developed in turbine.
- ρ :
-
air density 1.223 kg/m3.
- A :
-
area swept by rotor blades.
- C p :
-
coefficient of power.
- λ :
-
ratio between blade tip speed and wind speed at hub height.
- β :
-
pitch angle,
- C p :
-
(λ, β) can be determined as
where λi is defined as,
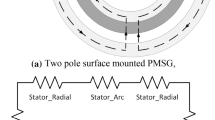
3 Modeling of PMSG
In this research paper, permanent magnet synchronous generator (PMSG) is used as the wind turbine generator due to its property of self-excitation (by permanent magnet) which eliminates the excitation loss, i.e., excitation losses are not increases as number of poles doubled. Two-phase synchronous reference rotating frame (d-q frame) is used to derive the dynamic model of the d-axis with PMSG in which the q-axis is 90° ahead with respect to the direction of rotation [9, 10]. The electrical model of permanent magnet synchronous generator in synchronous reference rotating frame is represented by the differential equations,
where Ra is resistance of stator winding, ωe and ωg are electrical and mechanical rotating speed, λ◦ is flux produced by the permanent magnets, P is number of pole pairs, Ud and Uq are d and q-axis voltages, Ld and Lq are d and q-axis inductances, Te is electromagnetic torque, and eq is q-axis counter electrical potential [11–15].
4 Performance Assessment with Balanced and Unbalanced Condition
The various performance characteristics like voltage and current at stator terminal and grid have been plotted for healthy and unbalanced condition are shown from Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 and 12. It is observed that THD or harmonics are found to be less with unbalanced condition in comparison to healthy condition. Such comparative analysis is also shown in Table 1.

Balance three-phase voltage at stator terminal

Balance three-phase current at stator terminal

Current measurement at stator terminal

Voltage measurement at DC link

Three-phase voltage at grid

Three-phase current at grid

Active power at stator terminal

Unbalanced three-phase current (LLL Fault) at stator terminal

Unbalanced three-phase voltage (LLL Fault) at stator terminal

Unbalanced three-phase current (LLL Fault) at grid

Unbalanced three-phase voltage (LG Fault) at stator terminal

Unbalanced three-phase current (LG Fault) at stator terminal
Similar kinds of results are also obtained for MSE which is shown in Table 2.
5 Conclusions
The analysis and modeling of a wind-driven permanent magnet synchronous generator are presented in this study. Controlling the pitch angle and tip to speed ratio of a wind turbine allows it to produce the most power. A permanent magnet synchronous machine's modeling is evaluated. After that, PMSG is analyzed to see if it is healthy or not. Variable loading conditions are used to define the unhealthy situation. Following that, power quality issues such as THD and MSE are investigated for both circumstances. It is observed that MSE and THD are found to be less with healthy condition in comparison with unhealthy condition.
References
Gupta RA, Singh B, Jain BB (2015) Wind energy conversion system using PMSG. In: 2015 international conference on recent developments in control, automation and power engineering (RDCAPE), pp 199–203. https://doi.org/10.1109/RDCAPE.2015.7281395
Tiwari R, Babu NR, Padmanaban S, Martirano L, Siano P (2017) Coordinated DTC and VOC control for PMSG based grid connected wind energy conversion system. In: 2017 IEEE international conference on environment and electrical engineering and 2017 IEEE industrial and commercial power systems Europe (EEEIC/I&CPS Europe), pp 1–6. https://doi.org/10.1109/EEEIC.2017.7977792
Alizadeh O, Yazdani A (2013) A strategy for real power control in a direct-drive PMSG-based wind energy conversion system. IEEE Trans Power Delivery 28(3):1297–1305. https://doi.org/10.1109/TPWRD.2013.2258177
Vadi S, Gürbüz FB, Bayindir R, Hossain E (2020) Design and simulation of a grid connected wind turbine with permanent magnet synchronous generator. In: 2020 8th international conference on smart grid (icSmartGrid), pp 169–175. https://doi.org/10.1109/icSmartGrid49881.2020.9144762
Ndirangu JG, Nderu JN, Muhia AM, Maina CM (2018) Power quality challenges and mitigation measures in grid integration of wind energy conversion systems. IEEE Int Energy Conf (ENERGYCON) 2018:1–6. https://doi.org/10.1109/ENERGYCON.2018.8398823
Mora A et al (2019) Model-predictive-control-based capacitor voltage balancing strategies for modular multilevel converters. IEEE Trans Industr Electron 66(3):2432–2443. https://doi.org/10.1109/TIE.2018.2844842
Bhimte R, Bhole K, Shah P (2018) Fractional order fuzzy PID controller for a rotary servo system. In: 2018 2nd international conference on trends in electronics and informatics (ICOEI), pp 538–542. https://doi.org/10.1109/ICOEI.2018.8553867
Nouman K, Asim Z, Qasim K (2018) Comprehensive study on performance of PID controller and its applications. In: 2018 2nd IEEE advanced information management, communicates, electronic and automation control conference (IMCEC), pp 1574–1579.https://doi.org/10.1109/IMCEC.2018.8469267
Zhang Z, Fang H, Gao F, Rodríguez J, Kennel R (2017) Multiple-vector model predictive power control for grid-tied wind turbine system with enhanced steady-state control performance. IEEE Trans Industr Electron 64(8):6287–6298. https://doi.org/10.1109/TIE.2017.2682000
Zhang Z, Wang F, Si G, Kennel R (2016) Predictive encoderless control of back-to-back converter PMSG wind turbine systems with extended Kalman filter. In: 2016 IEEE 2nd annual southern power electronics conference (SPEC), pp 1–6. https://doi.org/10.1109/SPEC.2016.7846202
Zhang Z, Kennel R (2015) Direct model predictive control of three-level NPC back-to-back power converter PMSG wind turbine systems under unbalanced grid. IEEE Int Symp Predictive Control Electr Drives Power Electron (PRECEDE) 2015:97–102. https://doi.org/10.1109/PRECEDE.2015.7395590
Sayritupac J, Albánez E, Rengifo J, Aller JM, Restrepo J (2015) Predictive control strategy for DFIG wind turbines with maximum power point tracking using multilevel converters. IEEE Works Power Electron Power Quality Appl (PEPQA) 2015:1–6. https://doi.org/10.1109/PEPQA.2015.7168207
Maaoui-Ben Hassine I, Naouar MW, Mrabet-Bellaaj N (2015) Model based predictive control strategies for wind turbine system based on PMSG. In: IREC2015 the sixth international renewable energy congress, pp 1–6. https://doi.org/10.1109/IREC.2015.7110914
Rahmani S, Hamadi A, Ndtoungou A, Al-Haddad K, Kanaan HY (2012) Performance evaluation of a PMSG-based variable speed wind generation system using maximum power point tracking. IEEE Electr Power Energy Conf 2012:223–228. https://doi.org/10.1109/EPEC.2012.6474955
Nasr El-Khoury C, Kanaan HY, Mougharbel I (2014) A review of modulation and control strategies for matrix converters applied to PMSG based wind energy conversion systems. In: 2014 IEEE 23rd international symposium on industrial electronics (ISIE), pp 2138–2142. https://doi.org/10.1109/ISIE.2014.6864948
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Agarwal, N.K., Singh, N., Saxena, A. (2023). Modeling and Analysis of Wind-Driven PMSG for Healthy and Unhealthy Conditions . In: Rani, A., Kumar, B., Shrivastava, V., Bansal, R.C. (eds) Signals, Machines and Automation. SIGMA 2022. Lecture Notes in Electrical Engineering, vol 1023. Springer, Singapore. https://doi.org/10.1007/978-981-99-0969-8_18
Download citation
DOI: https://doi.org/10.1007/978-981-99-0969-8_18
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-99-0968-1
Online ISBN: 978-981-99-0969-8
eBook Packages: EnergyEnergy (R0)