
Abstract
Exploration and production in deepwaters are dominated by compliant offshore structural systems due to the advantages that arise from their geometry and construction practices. Semi-submersibles are a class of floating offshore structures, which are widely preferred for deep and ultra-deepwater applications due to their better stability characteristics and lesser sensitivity to the harsh ocean environment. A semi-submersible is positioned-restrained using the spread mooring system with either a steel catenary geometry or taut-mooring. The present study highlights dynamic response analysis of a semi-submersible with the spread mooring system, and its fatigue life under cyclic environmental loads is estimated. Lateral loads that arise from waves, wind, and current cause dynamic tension variations in the moorings, influencing their fatigue life significantly, and it is observed that fatigue life of catenary mooring lines is higher than that of taut mooring lines. Lateral loads under different directions are considered to exhibit the influence of wave directionality on the semi-submersible response. The nonlinear coupled dynamic analysis between the semi-submersible and spread mooring system is carried out using commercially available tool ANSYS AQWA, and fatigue life of the mooring system is evaluated based on the S–N curve approach.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Rapidly depleting oil reserves and proliferate market demand for oil and gas production has shifted from deepwaters to ultra-deepwaters using floating offshore platforms (also known as floaters) like semi-submersibles, Drillships, FPSOs, etc., which are unique based on their geometric form, i.e. they are form dominated designed. However, as we move towards ultra-deepwaters the choice of platform varies depending upon the applications. The development and design of semi-submersible hulls can be traced back to the early 1960s when there was a rapid need to increase the stability of deepwater floating platforms. Bruce Collipp is known as the father of semi-submersible, who first coined the term semi-submersible in 1960. His early design and development of this structure were inspired by the stability, obtained by partially submerging the floating structure to avoid capsizing in rough sea conditions. The configuration of semi-submersible platforms has evolved since the 1960s owing to their good stability even in deepwaters since they have a small water-plane area which makes them less sensitive even under harsh environmental loadings. Due to the few advantages, semi-submersible platforms have best opted as the floating production platform until today.
In the recent past, many scholars studied various models of semi-submersible, design of the mooring system, etc., for reducing the response of the platform. Webster [1] conducted a parametric study on the damping induced by moorings and reveals that for high pretension in mooring lines, damping induced by the mooring lines is inversely proportional to the drag coefficient. Yilmaz and Incecik [2] developed a time-domain model for predicting the dynamic response of moored semi-submersible with thrusters and mooring lines for evaluating platform response and mooring forces. Based on the results obtained, they concluded that for extreme weather conditions maximum surge or sway response occurs based on their mean values. Senra et al. [3] suggested that there is great need of fully integrated design methodology, considering the coupling between structural behaviour of the vessel with mooring lines and risers. Chen et al. [4] studied coupled motion responses of semi-submersible with taut mooring system and found that more the number of mooring lines better will be the performance, mooring arrangement angle has a significant effect on the platform motion and response of dynamic tension of mooring line. Zhai et al. [5] numerically simulated the dynamic behaviour of deepwater semi-submersible and found that heave period as 22 s, while wave period was 8–16 s. By avoiding the maximum response in heave degrees-of-freedom, the peak coefficient has a significant effect on the response of the platform. Ng et al. [6] conducted experimental studies on semi-submersible model for various bi-directional wave crossing angles, to estimate the optimum wave crossing angle at which the response of the semi-submersible is maximum. They found that response of the model is affected by the wave crossing angles and the optimum wave crossing angles 40° and 55° are found to produce maximum heave, surge and pitch responses at low-frequency range.
Zhu and Ou [7], studied the motion performance of semi-submersible with mooring under combined wind and wave loads by numerically and experimentally. He found maximum surge motion of the platform is about 2% of water depth, which is one of the important criteria for drilling operation to run smoothly; otherwise, the riser connected for drilling operation will be subjected to dynamic loads and may even fail due to large surge response of the platform. Qiao and Ou [8] conducted model tests of a semi-submersible and validated with numerical results of semi-submersible with different mooring systems under various water depths and concluded that dynamic forces on mooring lines increases with increase in length of the mooring lines, and low-frequency (LF) motion dominates the surge, sway motion whereas, wave frequency (WF) motion dominates heave motion while pitch motion is due to both LF and WF motions. Wu et al. [9] have conducted analytical studies on the fatigue life of mooring lines and found various factors such as mooring pattern, length of mooring lines, pretension, mass concentration components, damping coefficients, and water depth, etc., are affecting the fatigue damage of mooring lines. They have also found critical locations where fatigue damage can occur such as at fairlead point for catenary mooring and top of the lower chain for taut mooring.
Yang et al. [10] investigated for mooring damping effects due to superimposition of low-frequency motion with wave frequency and concluded that response amplitude operators (RAO’s) and pretension of mooring plays a dominant role in damping of the mooring system. Du et al. [11] conducted a dynamic analysis of semi-submersible and estimated the fatigue damage of the mooring lines and concluded that platforms in deepwaters have less stiffness, high damping ratio for which the WF components increases and LF components decreases with increase in water depth due to higher damping. Hence, there is a decrease in LF fatigue damage with an increase in wave periods. Xu et al. [12], conducted model tests and numerical simulations for dynamics of semi-submersible, mooring damping and found that taut mooring with buoy causes stable semi-submersible motion with great mooring damping. The present study is conducted for estimating the motion responses of the semi-submersible under spread catenary (case 1) & taut mooring (case 2) system and evaluating the fatigue life of the spread mooring system.
2 Description of Semi-submersible Platform
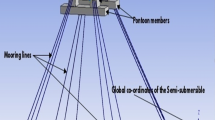
The platform geometry selected for present work is based on the configuration of the Hai Yang Shi You–981 which is a sixth generation deepwater semi-submersible platform which was deployed in the disputed waters of the South China Sea and Vietnam. The semi-submersible platform consists of the deck (superstructure) with drilling derrick, accommodation and production facilities, a helipad, accessories, four-column members, and two horizontal pontoons members connected with horizontal cylindrical members (braces). The numerical model of the semi-submersible is shown in Fig. 1, and detailed description is shown in Table 1.

Numerical model of semi-submersible
2.1 Spread Mooring System
During the drilling operation, the platform should not displace too much from its home position; otherwise, connected riser will be damaged. The platform is position-restrained with either of the dynamic positioning system and spread mooring system to avoid large displacements. In present work, a twelve-point symmetric mooring system is used which is made up of studless chain, and the layout of mooring system is shown in Fig. 2. The angle between each cable of the bundle is 10°, and the angle between each bundle is 70°.

Layout of the spread mooring system
Each mooring line is a combination of upper section as chain, middle section as wire, and the lower section as chain, and the configuration and properties of spread mooring system used are shown in Tables 2 and 3.
2.2 Environmental Conditions
The environmental conditions to which the semi-submersible is subjected to the present work is considered for 1 year and 100 year return period for the South China Sea. The wave, wind, and current loadings are considered in present work and are along the 0° (following sea condition), 45° (quarter sea condition), and 90° (beam sea condition). Because, a minimum of the bow, beam, quarter, down-line, and between-line environmental conditions should be analysed [13]. The wind spectrum used for the present study is the API spectrum, and the JONSWAP spectrum is used for irregular waves. The current loading (i.e. varying nonlinearly with respect to water depth) is applied to the platform and is user-defined up to a depth of 150 m (i.e. 10% of water depth) below the mean water level. Environmental conditions for which the semi-submersible are subjected are shown in Table 4.
2.3 Governing Equations
2.3.1 Wind Force Calculation
Ansys AQWA calculates the effect of fluctuation of wind about the mean speed on the dynamic load on the structure, and these dynamic loads generate low-frequency motions on floating offshore structures. In the present study, API wind spectrum is used, and Ansys AQWA calculates the wind fluctuation effect about the mean speed on dynamic loads acting on the semi-submersible, and these loads causes low-frequency (LF) motions on the semi-submersible. The API wind spectrum [14] used is represented by the expression given below:
While \(f\) and \(f_p\) are frequencies in Hz, and \(\overline{V}_Z\) is the mean speed for the one-hour duration at height (Z).
2.3.2 Wave Force Calculation
The wave loads acting on the semi-submersible are calculated by boundary element method (BEM) based on the diffraction theory using commercially available tool Ansys AQWA. For irregular waves with slow-drift, waves can be represented in the form of wave spectra, and the present study JONSWAP spectrum is used.
2.3.3 Coupled Dynamic Analysis of Semi-submersible and Spread Mooring System
In a coupled analysis approach, a time-domain analysis is employed to represent coupled semi-submersible and mooring response at every instant of time. The semi-submersible is considered as a rigid element with six degrees-of-freedom, i.e. three translational (surge, sway, and heave) and three rotational (roll, pitch, and yaw) in the finite element model of the semi-submersible. The dynamic equilibrium equation for rigid element, i.e. semi-submersible, is written as [15]:
where
\(F_I \left( {x,\ddot{x}, t} \right) \) is inertia force vector; ‘M’ is mass matrix of semi-submersible which includes structural mass and added mass, i.e. M = m + ma
\(F_D \left( {\dot{x},t} \right) \) is damping force vector; ‘C’ is damping matrix; ‘K’ is the stiffness matrix.
\(P_{{\text{External}}} \left( {x,\dot{x},t} \right) \) is external force vector, due to wind, wave, and current loads including buoyancy, and \(F_{{\text{Radiation}}} \left( {\dot{x}, t} \right)\) is radiation force vector.
x, \( \dot{x}, \ddot{x}\) = Nodal displacement, velocity, and acceleration vector.
The dynamic variations in tension of mooring lines caused by the wave frequency motions are calculated, and mooring cables are modelled as a dynamic system [16].
‘M’ being the structural mass matrix, ‘Ma’ is added mass matrix, ‘x’ is a displacement vector, ‘\(\dot{x}\)’ is velocity vector, ‘\(\ddot{x}\)’ is acceleration vector, ‘C’ is the damping matrix, ‘K’ is stiffness matrix, ‘\(F_{{\text{static}}}\)’ is the static load, ‘\(F_{WF}\)’ is first-order wave loads, and ‘\(T_M\)’ is tension in the mooring system.
3 Numerical Simulation and Analysis
To carry out coupled dynamic analysis of the semi-submersible with spread mooring system commercially available tool Ansys AQWA is employed, and the simulations have been carried out for 10,000s with a time step of 0.1 s.
3.1 Comparison of Response Amplitude Operators
Before carrying out further analysis, response amplitude operators (RAOs) of the semi-submersible is checked. The response amplitude operators of the present study and that obtained by Zhai et al. [5] are found to be closely matching and can be seen from Figs. 3, 4, and 5. But, there is little shift in the plots is observed, and this might be due to the reason that we have considered slow-drift with an irregular wave in the analysis, and Zhai et al. [5] has not given details whether they have considered slow-drift with irregular wave for analysis or not.

Surge RAO

Heave RAO

Pitch RAO
Surge response amplitude operator (RAO) of the present study is having a less initial amplitude of 1.1 m as shown in Fig. 3, which is advantageous for response analysis because RAO helps in determining the response spectrum. Heave response amplitude operator (RAO) curve in closely matching except, but there is a shift in the frequencies has been observed, and this can be due to the effect of slow-drift with an irregular wave.
The magnitude of heave RAO is quite high for Zhai et al. [5] compared to the present study, which indicates the better heave response of the platform considered for the present study. Response amplitude operator of pitch response for the present study shows less amplitude, as seen in Fig. 5 and possesses better response. From Figs. 4, 5, and 6, it is evident that RAO plots are closely matching, but there is a slight shift in the RAO plots has been observed, and this can be due to the effect of slow-drift with irregular waves. The present study considered the slow-drift with an irregular wave to assess the importance of wave-frequency effects on the drift of the vessel.

Surge response time history using catenary mooring for the 1 year return period
3.2 Natural Periods and Damping Ratios
Free decay tests were conducted in commercially available numerical solver Ansys AQWA. Semi-submersible is found to be active in all six degree of freedom, i.e. it has motion even in stiff degrees-of-freedom, i.e. vertical plane motion (roll, pitch, and heave). Unlike in triceratops, which is flexible in the horizontal plane of motion, i.e., surge, sway, and yaw and stiff in the vertical plane of motion, i.e. heave, roll, and pitch [17]. Natural damping ratios for catenary mooring are larger than that of taut mooring in almost all degrees of freedom, and this can be due to large length of catenary mooring lines (Table 5).
3.3 Motion Responses of the Semi-submersible
3.3.1 Time History Response of Semi-submersible
The semi-submersible motion time history plots with catenary and taut mooring under 1 year return period for 0°, 45°, and 90° wave directions are shown below. Motion responses under surge, heave, and pitch d-o-f and during 1 year return period are only shown, while other responses being insignificant and during 100 years return period are omitted for brevity.
The motion of semi-submersible is shown in the form of time history response plots, which is considered from the position of the centre of gravity of semi-submersible in global coordinates, i.e. x = 22.4 m for the surge d-o-f and z = − 5.8 m for heave d-o-f. From Figs. 6 and 7, it is clear that the surge response with catenary and taut is significant for 0°, 45° wave directions.

Surge response time history using taut mooring for the 1 year return period
From Figs. 8 and 9, it can be seen that the heave response under catenary and taut moorings are almost the same, irrespective of wave directions. Also, one can conclude that the heave response of the semi-submersible under taut mooring is more than that under catenary mooring. Figures 10 and 11 show that the pitch response of the semi-submersible is almost the same under the catenary and taut mooring system (Table 6).

Heave response time history using catenary mooring for the 1 year return period

Heave response time history using taut mooring for the 1 year return period

Pitch response time history using catenary mooring for the 1 year return period

Pitch response time history using taut mooring for the 1 year return period
3.4 Mooring Line Tension
In deep waters mooring lines will become more flexible and dynamic effects on mooring lines will be strong under the dynamic motion of the platform due to environmental loads. Hydrodynamic loads acting on the mooring lines are due to the combined effect of inertial loads, incident wave forces, and drag forces, and the total load is evaluated using the Morison formula. From mooring tension statistics, it is evident that the mooring tensions in environmental loading for catenary mooring ˃ taut mooring for directions 0° > 45° > 90°. The tension in mooring lines which are significant, i.e. most loaded mooring lines, based on the mooring tension statistics is only shown, and others are omitted for brevity (Fig. 12).

Tension in the catenary mooring line—11 and taut mooring line—2 for 0° wave direction
4 Fatigue Analysis
4.1 Palmgren-Miners Rule-Based Fatigue Analysis
The nonlinear dynamic variation in mooring line tensions will cause the fatigue damage of mooring lines, which will be estimated by Palmgren-Miners rule based on the S–N curve approach [18]. According to the Palmgren-Miners rule, the annual cumulative fatigue damage of the mooring line can be predicted by using the formula:
where ni is the number of cycles per year for tension range interval, and Ni is the number of cycles to failure under constant tension range ‘i’ as per the S–N curve. The stress in the mooring lines we have got is non-zero mean stress, which is modified as effective stress using Goodman criteria [19], and rain flow counting method is used to analyse the time history of the mooring stress. Parameters for S–N curve are chosen according to the standard code [20], and fatigue life is then calculated from estimated damage and then extrapolated for 10,000 s to find the fatigue life of the spread mooring system.
Fatigue life for a mooring line from the group of mooring lines, which are extremely loaded and least loaded are only discussed, because of a profuseness of data. The most loaded catenary mooring lines for 1 year return period under 0° wave loading are found to be mooring line #11 for which corresponding fatigue life 2.12 years. Similarly, under 45° wave loading for mooring line #3 having fatigue life 11.56 years and for 90° wave direction mooring line #6 is the most loaded having fatigue life of 18.5 years as shown in Fig. 13. The most loaded taut mooring line #2 have 1.28 years fatigue life for 0° wave direction. For 45° wave heading mooring line #3 is found to be most loaded and have 3 years of fatigue life, and mooring lines #4 and #10 are observed to be the most loaded having fatigue life of 1.36 years.

Fatigue life of catenary and taut mooring lines under 1 year return period
The fatigue life for spread catenary and taut moorings under various wave directions for one year return period is only shown. While fatigue life of the mooring lines under 100 years return period is omitted for brevity. Hence, based on the results obtained as shown in Fig. 13, one can conclude that fatigue life for spread catenary mooring is more than that of taut mooring.
5 Conclusion
Coupled dynamic response analysis of semi-submersible with spread mooring system has been carried out, and observations are made based on the results obtained. The natural periods of semi-submersible with taut mooring is greater than that of catenary mooring, and this can be due to less horizontal force component in taut mooring. The damping ratios of catenary mooring are greater than taut mooring, and this might be due to more length of catenary mooring. The semi-submersible response in surge d-o-f using catenary mooring under 0°, 45° environmental loading is better than that of taut mooring, while the response in the pitch d-o-f is nearly same for both taut and catenary mooring for 45° loading. While heave response is almost the same for both mooring system, under 0° and 45° loading. Based on the mooring tension statistics shown in Table 7, the standard deviation of tension in taut mooring lines is less than that of catenary mooring lines irrespective of the direction of environmental loading. Hence, the fatigue life of the spread catenary mooring is found to be more than that of taut mooring and possesses various advantages over taut mooring lines.
In general, global responses of the semi-submersible are affected by mooring configuration, water depth, and pretension in mooring lines due to the coupling effects. For future work, one can consider the effect of vortex-induced vibration on the moorings and effect of corrosion, for evaluating the fatigue life of the spread mooring system.
References
Webster WC (1995) Mooring induced damping. Ocean Eng 22(6):571–591
Yilmaz O, Incecik A (1996) Extreme motion response analysis of moored semi-submersibles. Ocean Eng 23(6):497–517
Senra SF, Correa FN, Jacob BP, Mourelle M, Masetti I (2002) Towards the integration of analysis and design of mooring systems and risers: part I—studies on a semisubmersible platform. In: ASME 21st international conference on offshore mechanics and arctic engineering, vol 1, Oslo, Norway, 23–28 June 2002, pp 41–48
Chen P, Chai S, Ma J (2011) Performance evaluations of taut-wire mooring systems for the deepwater semi-submersible platform. In: ASME 2011 30th international conference on ocean, offshore and arctic engineering, pp 207–215
Zhai GJ, Tang DY, Xiong HF (2011) Numerical simulation of the dynamic behaviour of deep-water semi-submersible platform under wind and waves. In: Advanced materials research, vol 243. Trans Tech Publications, pp 4733–4740
Ng CY, Kurian VJ, Liew MS (2011) Experimental investigation for the responses of the semi-submersible platform subjected to bidirectional waves. In: 2011 national postgraduate conference, IEEE, pp 1–5
Zhu H, Ou J (2011) The dynamic performance of a semi-submersible platform subject to wind and waves. J Ocean Univ China 10(2):127–134
Qiao D, Ou J (2013) Global responses analysis of a semi-submersible platform with different mooring models in the South China Sea. Ships Offshore Struct 8(5):441–456
Wu Y, Wang T, Eide Ø, Haverty K (2015) Governing factors and locations of fatigue damage on mooring lines of floating structures. Ocean Eng 96:109–124
Yang Y, Chen JX, Huang S (2016) Mooring line damping due to low-frequency superimposed with wave-frequency random line top-end motion. Ocean Eng 112:243–252
Du J, Wang S, Chang A, Li H (2016) An investigation on low-frequency fatigue damage of mooring lines applied in a semi-submersible platform. J Ocean Univ China 15(3):438–446
Xu S, Ji C, Soares CG (2018) Experimental study on taut and hybrid moorings damping and their relation with system dynamics. Journal of Ocean Engineering 154:322–340
API RP 2SK (2008) Design and analysis of station keeping systems for floating structures, 3rd edn. American Petroleum Institute
Aqwa Theory Manual (2016) Century Dynamics Limited
Ormberg H, Lie H, Stansberg CT (2005) Coupled analysis of offshore floating systems. WIT Trans State-of-the-art Sci Eng 18:389–429
Barltrop NDP (1998) Floating structures: a guide for design and analysis, vol 2. Oilfield Publications Limited, The Centre for Marine and Petroleum Technology
Chandrasekaran S, Nassery J (2015) Springing and ringing response of offshore triceratops. In: ASME 2015 34th international conference on ocean, offshore and arctic engineering. American Society of Mechanical Engineers, pp 1–6
Xue X, Chen NZ, Wu Y, Xiong Y, Guo Y (2018) Mooring system fatigue analysis for a semi-submersible. Ocean Eng 156:550–563
OrcaFlex Theory Manual (2014) Orcina Ltd.
DNV-RP-C203 (2005) Fatigue design of offshore steel structures
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2024 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Chandrasekaran, S., Uddin, S.A. (2024). Coupled Dynamic Analysis of Deepwater Semi-submersible with Spread Mooring System. In: Madhavan, M., Davidson, J.S., Shanmugam, N.E. (eds) Proceedings of the Indian Structural Steel Conference 2020 (Vol. 1). ISSC 2020. Lecture Notes in Civil Engineering, vol 318. Springer, Singapore. https://doi.org/10.1007/978-981-19-9390-9_1
Download citation
DOI: https://doi.org/10.1007/978-981-19-9390-9_1
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-9389-3
Online ISBN: 978-981-19-9390-9
eBook Packages: EngineeringEngineering (R0)