
Abstract
The severe vibration of helicopters have influenced the flight safety and the riding comfort. A good many technologies have been developed to suppress the helicopter fuselage vibration. They can be divided into two main types: active vibration control, passive vibration control. Now, the active vibration control technologies have been applied widely. The active control of structural response system (ACSRs) is one of the active vibration control technologies. It has many advantages, for example, no influence on rotor aerodynamics, and have been equipped in many helicopters. The actuator is a main component of ACSRs. There are many kinds of actuators, such as centrifugal inertial actuators, hydrostatic pressure actuators, electromagnetic actuators and piezoelectric actuators. Each kind of them have their own advantages and shortcomings, so they may be applicable to different helicopters. In this paper, the application of some kinds of actuators in helicopters, the basic principle, and the main performance parameters, such as output force are reviewed. A prospect of the development for the application of actuators in aviation for the future is made.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The vibration response of helicopter airframe will be led by the vibration load from the effect of excitation force caused by the main rotor blade, tail rotor blade and engine during the forward flight of helicopters. The reference shows that 40% of helicopter accidents are related to the vibration. Therefore, it is necessary to control the vibration level of the airframe during the forward flight of helicopters. At present, there are many passive and active vibration control techniques [1, 2]. The ACSRs is a widely used active vibration control method. It was developed by Westland Helicopters for the W-30 helicopter in the late 1980s [3] initially. ACSRs incorporating accelerometers, actuators, and so on, have been available commercially. It has many advantages, such as weight saving, vibration level control improving at a wider frequency band, and a more longer fatigue life of the component. ACSRs have been applied to many helicopters, such as S-92, V-22, UH-60M, S-76D, AW139, and EC225/725. These active methods have been proved effective over a range of configurations and helicopter frequencies. They have brought a significantly lower rotor-induced vibration level comparing to those passive approaches [4].
The actuator is a critical component in ACSRs in order to produce a controllable force for eliminating the vibration caused by the main rotor. The actual control effect of ACSRs on the airframe vibration is determined by its properties directly. It is used to introduce control force to the airframe to change the vibration response of the airframe. Now, though there are many kinds of actuators, but the centrifugal inertial, electromagnetic, hydraulic and piezoelectric actuators are used basically in helicopter ACSRs.
2 Actuators of Typical ACSRs
Currently, commercially available actuators are single-point. They apply inertial forces on the fuselage at their attached points. There are two main kinds of inertial actuators. The main difference is how the inertia is moved to produce force: rotating inertia and oscillating inertia. The principle of producing inertial force for the rotating inertia actuator is dependent on rotating an eccentric mass, while the principle of producing inertial force for the oscillating inertia is through oscillating a mass to produce a linear force.
2.1 Centrifugal Inertial Actuator
At present, force generators (FGs) of ACSRs applied already are usually centrifugal inertial actuators. The principle of centrifugal inertial actuators is using resonance of the mass to generate inertial force. But the magnitude of output force from the inertial actuator depends on the weight of the mass. To achieve a good controlling effect for the fuselage vibration, the weight of the inertial actuator used is 4–5% of the airframe weight in most cases while controlled by the inertial actuator [3]. The LORD active vibration control system (AVCs) on the Bell 429 helicopter is studied by Mahmood et al. [5]. Two different kinds of actuators were used. One of them is circular force generator (CFG) (Fig. 1).
The CFG is composed of two rotor disks. There is a mass attached on one side of each disk to form an imbalanced rotating mass. Every rotor is controlled by a single motor and rotate in the same direction at the rotor blade passing frequency. The angle between the disks changes to change the magnitude of the resultant force generated. The force generated by the two adjacent CFG's can be combined to generate a resultant linear or elliptical force as required. The maximum force output of the AVC system at rotor blade passing frequency for the Bell 429 is 288 lbf. The number of actuators installed is 4. The research shows that the weight of the active system with both actuator technology chosen can be reduced relative to the passive technology. Moreover, the vibration level is reduced below the target with the both active systems.
X2 Technology™ Demonstrator is a high speed helicopter developed by Sikorsky Aircraft [6, 7]. The flight speed arrives at 417 km/h. The vibration load transmitted to the airframe increases sharply. The helicopter is dependent on ACSRs completely without any passive control device in order to cancel the huge vibration load. There are six centrifugal inertial actuators in the ACSRs (Fig. 2). The actuator is the Moog Vibration Control Actuation System (VCAS). The VCAS is composed of a electronic unit (EU) and FGs. There are a pair of counter-rotating eccentric masses spinning at 4/rev. The flight test shows that the vibration level of the airframe meets the goal all through in the range of flight speed.

CFG installation on keel beam [5].

The circular rotating force generators (CRFGs) of Moog Inc. [8] have been used in several helicopters, such as S-92, UH-60M, and V-22. There are two eccentric masses in one CRFG. They rotate in opposite directions (counter-rotated) with a single electric motor and a gear system. The counter-rotating masses in one CRFG generate a sinusoidal inertial force along a single axis, as shown in Fig. 3. The force amplitude is directly proportional to the square of rotational frequency. For a given rotational frequency, the force amplitude generated is unchanged for a single CRFG. The result sinusoidal force amplitude and phase are controlled by the relative phase between a pair of CRFGs.

Force vector diagram of a CRFG, Moog Inc. [8].
The CRFG and schematic diagram of a rotating eccentric mass in a pair of CRFGs are shown in Fig. 4 [8]. Moog Inc.’s CRFGs are used in the study on vibration control systems for a light civil helicopter (LCH) by Kim et al. [1] in the LCH Development Program funded by the Ministry of Trade, Industry and Energy (Korea). The key features of the two pairs of CRFGs used are listed in Table 1.
An AVCs for the S-92 helicopter has been designed and flight-tested by Sikorsky Aircraft Corporation [9]. The inertial FGs were used. They are single point devices. A 1000 lb force could be produced by each inertial FG from a pair of counter-rotating eccentric disks. The first flight test of a S-92 helicopter with the AVCs was carried out in December of 1998. The vibration suppression of the AVCs was demonstrated in a large range of flight conditions and ballast configurations. The average level of cockpit and cabin vibration reduction was at least 50% (below 0.15 g) when speeds varied from hover to 150 knots.
Centrifugal inertial actuators have many advantages such as smaller volume, light weight, large output force, smaller power required, adapting a wide frequency band, and so forth. It is applicable to large helicopters, medium helicopters, and new helicopters with a changeable rotating speed.
2.2 Hydrostatic Pressure Actuator
The test verification on the ACSR was carried out by Millott for UH-60M at 2003 [10, 11]. The vibration transferred to the fuselage was controlled by three hydraulic servo actuators. The structure of the vibration control system is shown in Fig. 5. The experimental result shows that the controlling effect is better for different flight statuses.

Pairing two CRFGs, Moog Inc. [8].

The experimental work was carried out over a total of five days in two visits to the Yeovil site during February and March 2011. The practical application of ACSRs developed initially on the Agusta Westland W30 helicopter is described by Mottershead et al. [12]. It was tested in the vibration test house at Yeovil. The experiment was carried out over a total of five days. In the experiment, the electro-hydraulic actuators was used. An electro-hydraulic actuator constitutes an part of the support system. It imparts a force between the raft and the airframe in parallel with each of the four elastomeric mounts. This configuration, described in Fig. 6a, b, makes up of the original Agusta Westland ACSRs. The flight experiment is successful. The result shows that the average vibration level of cockpit is reduced by 72–82% than the passenger cabin.

Electro-hydraulic actuator and it’s location [12].
The same active vibration control technology is applied in the EH-101 helicopter by Westland/Agusta [13]. The difference is that four small electro-hydraulic actuators are incorporated into struts of the main gearbox (Fig. 7). The structure is compact. The flight test shows that the average vibration level is reduced by 59–88% at ten observation points throughout the entire flight speeds.
The ACSRs for S-76B helicopter is also studied by Sikorsky Aircraft [14]. Six electro-hydraulic actuators are incorporated into the main rotor gearbox attachments in parallel with four stiff spring mounts (Fig. 8). The ground shake test showed a 86% of N/rev cockpit vibration reduction and a 50% of N-1/rev and 2 N/rev cockpit vibration reduction. The vibration at the pilot and copilot stations was controlled effectively by the ACSRs throughout the entire speed range. The intrusion index was kept well below the ADS-27 limit. The actuator force and power was predicted in the simulated flight. The maximum actuator force ranged from 2000 to 3200 lbs within the forward speed range. The maximum power of 9.5 horsepower was needed for operating four actuators.

EH101 helicopter actuator location [13].

S-76 helicopter actuator location [14].
An ACSRs like AVCs was demonstrated by Welsh et al. on a Sikorsky UH-60 Black Hawk helicopter [15]. Two inertial-type FGs were used. They apply force at a single point of the fuselage. The inertial FG is shown in Fig. 9. It is a hybrid resonant device. It incorporated the UH-60 passive vibration absorber with a hydraulic servo actuator. Therefore, the FG can be used as a passive vibration absorber, or a active actuator. The inertial mass of each force generator is 40 lbs, and the maximum travel distance is 0.2 inches. A 1200 lb force could be produced by each FG at the N/rev frequency (17.2 Hz). The AVCs is better continuously than the passive vibration control system throughout all forward speeds. A 65% vibration reduction is achieved at a forward speed of 145 knots, while a 45% reduction for the passive system. The maximum hydraulic power needed to manipulate the two force generators is in the range of 1.0–8.0 horsepower, in accordance with the main rotor speed and flight condition.
The Active Vibration Reduction system (AVRs) is an ACSR like system developed by Kawasaki Heavy Industries of Japan [16, 17]. Hydraulic actuators are incorporated in parallel with the main gearbox mounts to eliminate vibrations at N/rev and 2N/rev. At 1997, the AVRs was equipped in series production on the Kawasaki BK 117 helicopter. Flight tests of the AVRs were carried out on a series of production model BK 117 helicopters. The aim is to evaluate the system at a forward speed from hover to 150 knots. The N/rev and 2N/rev vertical vibration under the pilot seat was reduced below 0.1 g by the AVRs throughout the entire forward speed range. At least 45% reduction of N/rev vibration level at all forward speeds is achieved.
The Multipoint Adaptive Vibration Suppression System (MAVSS) is developed by Bell Helicopter. It is used to reduce the rotor-induced vibration over a broad area of the airframe [18]. Ground shake testing of the system for Model 412 helicopter was carried out. Four hydraulic control actuators were placed in parallel with elastomeric gearbox mounts. It is showed that the vibration is reduced by 94% at six sensor locations. The system has also been tested on a V-22 0.2-scale aeroelastic semispan tiltrotor model.
2.3 Electromagnetic Actuator
The electromagnetic actuator is used for the first ACSRs developed and certified by Eurocopter [19]. The actuator is composed of a magnetic inertial mass fixed on a spring. It is controlled by an electromagnetic field produced by a coil (Fig. 10). The magnet mass and the stiffness of the spring element is selected such that the resonance frequency of the system is nearby the vibration frequency range to be controlled. It may provide large dynamic effort with a small current. So, the power required is minimum.

UH-60 servo inertial force generator [15].

Electromagnetic actuator [19].
EC225 is a 11 tons helicopter. A new generation of vibration control system is equipped with a electromagnetic actuator (Fig. 11). The system is composed of 3 actuators (one in the cockpit and others in the cabin rear). The ACSRs is the only vibration control system equipped on EC225. The mass is less than 0.8% of the whole mass of the helicopter. Furthermore, the electrical consumption keeps low [19].
The inertial electrodynamic linear actuator (IELA) used in the AVCs on the Bell 429 helicopter is shown in Fig. 12 [5]. The IELA utilizes a voice-coil type motor. A magnet assembly makes up a part of the moving mass at the end of a cantilevered flexure component. The flexural stiffness is chosen to have a resonant frequency at or near the passing frequency of the rotor blade. The mass and magnet assembly is actuated by the current flowing through a coil of copper wire. It is attached to the base of the setting. The setting is fixed firmly to the helicopter on keel beam. The maximum force output of the AVCs at rotor blade passing frequency is 250 lbf. The number of actuators installed is 2 [5].

The electromagnetic AVCs on EC 225 [19].

Linear actuator on Bell 429 [5].
Boeing Helicopter’s Active Vibration Suppression (AVS) utilizes electromagnetic resonant actuators. It is placed in the cockpit to eliminate vibration at N/rev and 2 N/rev [20]. The actuators generate structural force to cancel vibration at the sensor locations. There are a pair of electromagnetically controlled spring/mass assemblies. It is tuned to the N/rev and 2 N/rev frequencies. The ACSRs was installed on a CH-47D helicopter, and one N/rev actuator was placed under the pilot seat. The ground shake test shows that the N/rev vibration under the pilot seat reduced by a 97%. The peak of actuator force output was 2600 lbs at N/rev and 1500 lbs at 2 N/rev.
The flight test of ACSRs utilizing two self-developed electromagnetism inertial actuators for a light helicopter is carried out by Lu et al. [21]. The actuator is shown in Fig. 13. The weight of each actuator is 8kg. The operating frequency is in the range of 18.9–19.7 Hz. The maximum output force is 78kg. The result shows that a reduction of 33–66% is achieved through the ACSRs for each speed state.
2.4 Piezoelectricity Actuator
Piezoelectric stack actuators (PSAs) is effective for the control of helicopter vibration. There are many advantages such as large output force, rapid response, wide range of operating frequency, and lightweight, and so forth. The harmonic control of helicopter fuselage vibration through PSAs was studied by Song and Xia [22, 23]. The experiment was carried out. The result shows good vibration reduction.
The feasibility of utilizing a piezoceramic actuator for vibration reduction in the helicopter airframe has been investigated analytically by Hanagud and Babu [24]. The airframe is modeled through a simple beam finite-element-model with concentrated masses. It is composed of 10 elements, 11 nodes, and 33 degrees-of-freedom. A 60% vibration reduction is realized in the vertical direction at the sensor location. They came to the conclusion that a more sophisticated airframe and actuator model should be included.
The concept of the vibration control system based on piezo-actuator is show in Fig. 14. The vibration in the cabin induced by the rotor is eliminated by a secondary vibration field produced by piezo-actuator. This ACSRs based on piezo-actuator is realized by a new actuation technology, that is piezo-ceramic actuation [25]. The piezo active spring design is shown in Fig. 15. The actuator produces control forces by the attached mass inertia.

Actuator in a light helicopter [21].

Piezo-AVCS concept [25].
Piezo-ceramic elements are embedded into a GFRP structure allowing direct electrical control over the actuation forces. The actuation technology has some of advantages because of no moving components involving, that is no wear, no friction, high life time, silent actuation, direct electrical control, extremely accurate, very high bandwidth. The test includes preliminary test, endurance test and full-scale test. The articles, the single-mass and dual-mass inertial force generators are showed in Fig. 16.

Piezo-active inertial force generator [25].

Test articles [25].
The AVCs using piezoelectric stacks as actuators for Z-11 helicopter is studied by Meng et al. [26]. Four piezoelectric stack actuators (PSAs) are installed at four corners of the scaled Z-11 helicopter fuselage floor (Fig. 17). The PSA used is PSt 150/7/100 VS12. Its physical parameters are listed in Table 2 [26]. The experimental result shows that the effectiveness of the PSA-driven active vibration control is quite good. A reduction of 92 and 94% at two objective points is achieved when two dominant harmonics are controlled, and the vibration is reduced by 69 and 72% when controlling the first harmonic.
The simulation and test of active vibration control for AH64-4 helicopter tail beam model using piezostack actuators is studied by Walchko [27]. The vibration of tail beam model is controlled through four piezostack actuators fixed at the load paths of tail beam (Fig. 18). The result shows that the control effective is well.

Frame structure with PSAs [26].

Tail beam model using piezo actuators [27].
3 Conclusions and Prospect
In conclusion, the ACSRs can suppress vibration over the whole forward speed range effectively. At least 50% of cabin vibration could be reduced by a majority of the systems. The control force of single point actuation systems are produced by inertial devices. The maximum control force is in the range of 1000 and 3200 lbf. The weight of the ACSRs is less than the passive vibration control system. The power of ACSRs is lower. The application of ACSRs in helicopters will be more widely used with the development of Aviation Intelligence. Especially, piezoelectric actuator might be used widely.
References
Kim, D.H., Kim, T.J., Jung, S.U., et al.: Test and simulation of an active vibration control system for helicopter applications. Int. J. Aeronaut. Space Sci. 17(3), 442–445 (2016)
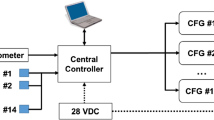
Hu, M., Wang, L., Chen, K., Yan, W., et al.: Research and implementation of centrifugal harmonic force generator system for vibration control. In: Proceedings of the 5th China Aeronautical Science and Technology Conference, LNEE 821, pp. 385–397. Zhejiang, China (2022)
Staple, A.E.: An evaluation of active control of structural response as a means of reducing helicopter vibration. In: Proceedings of the 46th Annual Forum of the American Helicopter Society. Washington, DC (1990)
Swanson, D., Black, P., Girondin, V., et al.: Active vibration vontrol using circular force generators. In: 41st European Rotorcraft Forum, Munich, Germany (2015)
Mahmood, R.S., Heverly II, D.E.: In-flight demonstration of active vibration control technologies on the Bell 429 helicopter. In: Proceedings of the American Helicopter Society 68th Annual Forum, Fort Worth, Texas (2012)
Blackwell, R., Millott, T.: Dynamics design characteristics of the Sikorsky X2 technologytm demonstrator aircraft. In: Proceedings of the American Helicopter Society 64th Annual Forum. Montreal, Canada (2008)
David, E.H., et al.: Adaptive algorithms for rotorcraft active vibration control. In: Proceedings of the 65th Forum of the American Helicopter Society, Grapevine, Texas (2009)
Garnjost, K.D., Rey, G.J.: Modular vibratory force generator, and method of operating same, US Patent 5,903,077. Moog Inc, USA (1999)
Goodma, R.K., Millott, T.A.: Design, development, and flight testing of the active vibration control system for the Sikorsky S-92. In: Proceedings of the 56th Annual Forum of the American Helicopter Society, pp. 764–771. Virginia Beach, VA (2000)
Welsh, W.A., et al.: Flight test on an active vibration control system on the UH 60 Black Hawk helicopter. In: Proceedings of the 51st Annual Forum of the American Helicopter Society, pp. 393–402. Fort Worth, TX (1995)
Millott, T.A., Robert, G.K., Jonathan, K., et al.: Risk reduction flight test of a pre-production active vibration control system for the UH-60M. In: American Helicopter Society 59th Annual Forum. Phoenix, USA (2003)
Mottershead, J.E., Tehrani, M.G., James, S., et al.: Active vibration control experiments on an Agusta Westland W30 helicopter airframe. Arch. Proceed. Inst. Mechan. Eng. Part C J. Mech. Eng. Sci. 1989–1996 (203–210) 226(C6), 1504–1516
Mei, Z.: Robust Structural Response Control for Helicopter. Nanjing University of Aeronautics and Astronautics, M. D. diss. (2007)
Welsh, W.A., Von Hardenberg, P.C., Von Hardenberg, P.W., et al.: Test and evaluation of fuselage vibration utilizing active control of structural response (ACSR) optimized to ADS-27. In: Proceedings of the 46th Annual Forum of the American Helicopter Society, pp. 21–37. Washington, DC (1990)
Welsh, W., Fredrickson, C., Rauch, C.: Flight test of an active vibration control system on the UH-60 Black Hawk helicopter. In: Proceedings of the 51st Annual Forum of the American Helicopter Society, pp. 393–402. Fort Worth, TX (1995)
Aso, M., Bandoh, S.: The development of the total vibration reduction (TVR) system. In: Proceedings of the 55th Annual Forum of the American Helicopter Society, pp. 202–208. Montreal, Quebec, Canada (1999)
Kawaguchi, H., Bandoh, S., Niwa, Y.: The test results of AVR (Active Vibration Reduction) system. In: Proceedings of the 52nd Annual Forum of the American Helicopter Society, pp. 123–136. Washington, DC (1996)
Settle, T.B., Nixon, M.W.: MAVSS control of an active flaperon for tiltrotor vibration reduction. In: Proceedings of the 53rd Annual Forum of the American Helicopter Society, pp. 1177–1193. Virginia Beach, VA (1997)
Konstanzer, P., Enenkl, B., Aubourg, P.A., et al.: Recent advances in Eurocopter’s passive and active vibration control. In: American Helicopter Society 64th Annual Forum. Montréal, Canada ( 2008)
Teal, R.S., McCorvey, D.L., Malloy, D.: Active vibration suppression for the CH-47D. In: Proceedings of the 53rd Annual Forum of the American Helicopter Society, pp. 211–219. Virginia Beach, VA (1997)
Lu, Y., Gu, Z., Ling, A., et al.: Flight test of active control of structure response for helicopter. J. Vib. Eng. 25(1), 24–29 (2012)
Song, L., Xia, P.: A harmonic synchronous identification-updating method for Active control of helicopter structural response driven by piezoelectric stack actuators. J. Am. Helicopter Soc. 60(3), 032013-1-14 (2015)
Song, L., Xia, P.: Active control of helicopter structural response using piezoelectric stack actuators. J. Aircr. 50(2), 659–663 (2013)
Hanagud, S., Babu, G.L.: Smart structures in the control of airframe vibrations. J. Am. Helicopter Soc. 39(2), 69–72 (1994)
Konstanzer, P., Grünewald, M., Jänker, P., et al.: Piezo tunable vibration absorber system for aircraft interior noise reduction. In: Euronoise 2006. Finland (2006)
Meng, D., Xia, P.Q., Song, L.H., et al.: Experimental study on piezoelectric-stack-actuator-driven active vibration control of helicopter floor structure. J. Aircr. 57(2), 377–382 (2019)
Walchko, J.C.: Hybrid Feedforward-Feedback Control for Active Helicopter Vibration Suppression. Department of Mechanical and Nuclear Engineering, Pennsylvania State University, Pennsylvania (2007)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 Chinese Aeronautical Society
About this paper

Cite this paper
Zhu, H. et al. (2023). Progress of Study on the Application of Actuators in Helicopter Airframe ACSRs. In: Chinese Society of Aeronautics and Astronautics (eds) Proceedings of the 10th Chinese Society of Aeronautics and Astronautics Youth Forum. CASTYSF 2022. Lecture Notes in Electrical Engineering, vol 972. Springer, Singapore. https://doi.org/10.1007/978-981-19-7652-0_48
Download citation
DOI: https://doi.org/10.1007/978-981-19-7652-0_48
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-7651-3
Online ISBN: 978-981-19-7652-0
eBook Packages: EngineeringEngineering (R0)