
Abstract
A simulation study using an active vibration control system (AVCS) to reduce airframe vibrations of an unmanned compound helicopter is conducted. The present unmanned compound helicopter uses wings, propellers, and a lift-offset coaxial rotor system, with two blades per rotor for high-speed flight. The airframe vibration responses are reduced using the AVCS at 230 knots. The hub vibratory loads of a lift-offset coaxial rotor are calculated using a rotorcraft comprehensive analysis code, CAMRAD II. The obtained rotor vibratory loads excite the airframe structure, represented as a one-dimensional stick (elastic line) model. The finite element analysis software, MSC.NASTRAN, is used to model the structural dynamics and analyze the vibration response of the airframe. The AVCS in this work uses the Fx-LMS (Filtered-x Least Mean Square) algorithm to determine the vibration cancellation signal produced by the force generators, which has the same amplitude but opposite direction to the airframe vibration signal. Herein, the AVCS consists of four force generators and six accelerometers and the simulation framework is constructed using MATLAB Simulink. Ten AVCS simulations are conducted, considering the different locations and various directions of the vibration cancellation forces from the force generators. When AVCS is applied to the airframe at a flight speed of 230 knots, the 2/rev longitudinal and vertical vibration responses at the specified airframe positions, such as the remote cockpit device, wing root, and wing tip, are reduced by 81.39–99.93%, compared to the baseline results without AVCS application.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
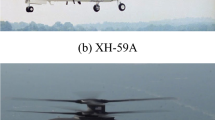
Conventional helicopters have unique capabilities compared to fixed-wing aircrafts, such as hovering and vertical take-off/landing, but the maximum flight speed is very slow (approximately 150–170 knots). Recently, compound helicopters, with auxiliary propulsion and wings as well as rotors, have received significant interest in addressing this drawback. Among the various types of compound helicopters, lift-offset compound helicopters, such as the XH-59A, X2 technology demonstrator (TD), S-97 Raider, and SB > 1 (Fig. 1), have demonstrated excellent high-speed flight capability. As shown in Figs. 1 and 2, a lift-offset compound helicopter uses a counter-rotating rigid-coaxial rotor (or lift-offset coaxial rotor). The lift-offset coaxial rotor produces most of the lift on the advancing blades but the retreating blades are offloaded [1]; therefore, dynamic stall is not experienced on the retreating side. Furthermore, the lift-offset coaxial rotor is capable of producing more lift force than the main rotor of a conventional helicopter, and the rotor may be moderately slowed down. Finally, the lift-offset compound helicopter has high-speed flight capabilities, with the help of auxiliary propulsion.

Various lift-offset compound helicopters

Characteristics of lift-offset rotor [1]
The Nb/rev vibrations are most important when Nb is the number of blades for a rotor and 1/rev (or 1P) is the non-dimensional rotor rotational speed; this is due to the unique rotor dynamics characteristics. These vibrations are caused from the complex rotor aerodynamic environment in edgewise flight conditions, weight unbalance of the rotating equipment, gear meshing of the transmission, and so on. In particular, the significant vibration of the lift-offset compound helicopter caused from the main rotor system may limit its maximum flight speed and result in various structural problems [2]. The rotational speed of a lift-offset coaxial rotor is reduced in high-speed flight and hence typical passive vibration control techniques, using rotor head-mounted absorbers, compliant mounts (isolators), and airframe-mounted absorbers, are not appropriate for the lift-offset compound helicopter. In recent years, lift-offset compound helicopters, such as the X2TD [3, 4], S-97 Raider, and SB > 1 Defiant, have used the active vibration control system (AVCS) to reduce the airframe vibration response. The AVCS reduces the airframe vibration response by minimizing the sum of the airframe vibration and vibration cancellation signals. The AVCS consists of force generators to produce vibration cancellation forces, accelerometers, and a closed-loop feedback controller [5,6,7].
Although the AVCS has successfully demonstrated the airframe vibration reduction of lift-offset compound helicopters [3, 4, 7], conventional helicopters (Korean utility helicopter [5, 6], UH-60 M [8] and S-92 [9]), and tiltrotor aircraft (V-22 [10]), there have been no studies on using AVCS to reduce the airframe vibration response of a lift-offset compound helicopter, which has wings as well as a lift-offset coaxial rotor. The wing vibration of a tiltrotor aircraft, which is a convertible aircraft with proprotors and wings, may not be significant, since its proprotors are used as propellers in high-speed airplane mode. However, when the wings are additionally used for a lift-offset compound helicopter, it is expected that the wing vibration may be significant due to excitation from the large hub vibratory loads of the lift-offset coaxial rotor rather than the excitation from propellers.
Therefore, in this work, the AVCS attempts to alleviate numerically the airframe vibration responses of an unmanned lift-offset compound helicopter, which utilizes a lift-offset coaxial rotor, wings, and propellers for high-speed flights (Fig. 3). The hub vibratory loads of a lift-offset coaxial rotor are predicted using CAMRAD II, which is a rotorcraft comprehensive analysis code [11]. The airframe is represented using a one-dimensional (1D) stick (elastic line) model and its structural dynamics is modeled by MSC.NASTRAN, which is a commercial finite element analysis software. The AVCS simulation framework is constructed with MATLAB Simulink. Using these analysis tools, the AVCS attempts to reduce 2/rev longitudinal and vertical vibration responses of specified airframe locations (at the remote cockpit devices, wing root, and wing tip) at a flight speed of 230 knots.

Unmanned lift-offset compound helicopter
2 Simulation Methods
2.1 Unmanned Lift-Offset Compound Helicopter
Table 1 summarizes the general properties of the present unmanned lift-offset compound helicopter, which is now under the conceptual design. In this work, the airframe vibration responses are calculated using a one-way coupling technique between a lift-offset rotor and airframe. First, the hub vibratory loads of the rotor are calculated by CAMRAD II [11]. Then, the obtained hub vibratory loads excite the airframe structure and the longitudinal and vertical vibration responses at the specified airframe locations are calculated using MSC.NASTRAN. In this paper, the excitation using a lift-offset coaxial rotor only is considered, since it is assumed that two propellers are not operated in the edgewise condition, but in the axial flow condition with the simple and symmetric aerodynamic environment, and the propeller in this condition may not cause serious vibrations of the present rotorcraft. In this one-way coupling approach, the motion of the airframe is not considered in the rotor analysis, as with the two-way coupling approach (rotor-airframe coupled analysis), which is a kind of the fully coupled analysis for the dynamic system including rotating components [12]. Compared to the two-way coupling method, the one-way coupling technique is much simpler; however, it can also reasonably predict the vibration responses of an airframe excited by the hub vibratory loads of a rotor, when the rotor shaft structure is not flexible but stiff [13]. The shaft of a lift-offset rotor should be extremely stiff to withstand the severe hub bending moments of a lift-offset rotor due to lift offset; hence, in this study, the one-way coupling method is sufficient to calculate the airframe vibration of the unmanned lift-offset compound helicopter.
The lift-offset rotor model in the present study is almost the same as that used in the present authors’ previous work [14], except for the aircraft gross-weight (GW) value (GW = 5133 lbs in reference [14] and 5214 lbs in this work). Despite this small difference, the modeling and analysis techniques of a lift-offset rotor are described in this paper, again. Unlike in the previous work [14], two different airfoil sets are considered in the present study, as shown in Fig. 4: one uses advanced airfoils, based on previous works [14,15,16]; the other uses basic NACA00xx airfoils. In Sect. 3.1, the effects of the airfoil sets will be investigated on the performance and vibration of the lift-offset coaxial rotor. The chord length and pre-twist distributions are based on the X2TD lift-offset rotor [1]. The airfoil database, including the aerodynamic coefficients of the airfoils, is generated using MSES [17] for both the advanced and NACA00xx airfoils; its description and some results for advanced airfoils are provided in reference [16]. The rotor rotational speed is scheduled to limit the Mach number at the tip of the advancing blade to be no greater than 0.9, as shown in Fig. 5.

Spanwise distribution of rotor airfoil sections

Schedule of rotor rotational speed
The rotor analysis in the present work uses an isolated rotor model; thus, the rotor shaft angle is appropriately assumed, as similar to the previous works [14,15,16]. The rotor shaft angle at a flight speed of 70–250 knots has a value of 1°–4° so that, as the flight speed increases, the rotor power predicted by the analysis reduces to almost zero in high-speed flights; this is because most of the power is used to drive the two propellers attached to the wing tips. This can be similarly observed in the X2TD flight test [4]. The lift-offset (LOS) value of a lift-offset coaxial rotor, shown in Fig. 6, is defined using Eq. (1) and assumed to be similar to that in previous work [16]:
where Mroll and T are the hub roll moment and thrust (or lift) of each rotor of a lift-offset coaxial rotor, respectively.

Schedule of lift-offset (LOS)
The lift-sharing between a lift-offset coaxial rotor and wings obtained from the conceptual design results for the present unmanned lift-offset compound helicopter is plotted in Fig. 7; as shown, the rotor lift decreases but the wing lift increases as flight speed increases. At 250 knots, the rotor carries only 20% of the total lift force; however, the wings generate 80% of the lift.

Lift forces of rotor and main wings
2.2 Rotor Aeromechanics Modeling
Although aeromechanics modeling for a present lift-offset coaxial rotor has already been described in the authors’ previous work [14], it is given again in this paper. A rotorcraft comprehensive analysis code, CAMRAD II [11], is used to analyze the lift-offset coaxial rotor of the unmanned compound helicopter, based on the modeling and analysis techniques established in the authors’ previous work [16]. Figure 8 shows the CAMRAD II model with a cross-over angle (or blade-indexing) of 0°; this angle is the rotor azimuthal angle, where the reference blades of the upper and lower rotors cross-over each other.

CAMRAD II model for a lift-offset coaxial rotor
Similar to previous research [15, 16], the blade sectional properties for the elastic beam modeling of a rotor blade are obtained by applying the Mach-scaling law [18] to those of the XH-59A helicopter, the first lift-offset compound helicopter [2], and then slightly modifying for better blade dynamics. For the structural dynamics modeling of a blade, nonlinear finite elastic beam elements are used, considering small strain and moderate deflections. The rotor control system, comprising the pitch horn, pitch link, and swashplates, is also modeled. The pitch horn and swashplates are modeled using rigid bodies, but the stiffness of a pitch link is assumed appropriately to represent the blade’s high-stiffness in torsion. The geometric design of this rotor control system is conducted based on that of the XH-59A rotor [2]. Figure 9 shows the predicted natural frequencies of a rotating blade when the collective pitch angle is 10°. In this figure, the first flap (1F) and first lead–lag (1L) frequencies are between the 1/rev and 2/rev frequencies in the range of rotor rotational speed from hover (100% nominal RPM) to high speed (70% nominal RPM). In addition, resonance may be avoided in lower modes (below 6/rev) as the natural frequencies of a rotating blade do not intersect the frequencies of nNb/rev (= nNb P) in the operating range of the rotor rotational speed, where n is an integer number. The first torsional frequency (1 T) is very high, because its value is higher than 10/rev in the rotational speed range.

Rotating blade frequencies
The second-order lifting line theory is used for the unsteady rotor aerodynamics model. A number of aerodynamic panels are used to calculate the aerodynamic loads on rotating blades. The blade section airloads on a panel are calculated using the local angle of attack, Mach number at 75% chord length location, and aerodynamic coefficients from previously generated airfoil databases formatted in tables. In addition, the general freewake model is applied to represent the aerodynamic interaction between the upper and lower rotors.
The rotor trim is achieved using six primary rotor pitch controls of the upper and lower rotors (the collective pitch control angle and the lateral and longitudinal cyclic pitch control angles of each rotor) for the assumed rotor shaft angle. The thrust of a lift-offset coaxial rotor is trimmed to the gross-weight, excluding the lift force from the main wings (Fig. 7). The hub pitch moments of the upper and lower rotors are trimmed to zero and the torque offset of the two rotors is assumed to be zero. The hub roll moment of each rotor is prescribed using the assumed lift-offset value in Fig. 6 and Eq. (1).
The power of each rotor consists of induced power (Pi), profile power (Po), and parasitic power (Pp). In addition, the power of a lift-offset coaxial rotor (P) is defined as the sum of the upper and lower rotor powers. The aerodynamic performance parameter, the effective lift-to-drag ratio of the rotor system (L/De), is defined as
where L and X are the wind axis lift and drag of the lift-offset coaxial rotor, respectively, and V is the flight speed.
Although this study does not model the propeller, the power of a propeller (Ppropeller) can be estimated using the following [16, 19]:
where η is the propulsive efficiency (assumed to be 0.85 in this work) and q is the dynamic pressure. Furthermore, Drotor, is obtained from the CAMRAD II analysis.
Finally, the rotor vibration index (VI) [19] is defined as
where F and M are the hub vibratory forces and moments, respectively, of a lift-offset coaxial rotor. Further detailed expressions for the above equation are given in reference [16].
2.3 Airframe Structural Dynamics Modeling
2.3.1 Normal Mode Analysis Model
For the analysis of 2/rev airframe vibration responses of the unmanned lift-offset compound helicopter, a structural dynamics model is constructed using the finite element structural analysis program, MSC.NASTRAN. The finite element model is represented as a stick model using one-dimensional elastic beam elements. Compared to the three-dimensional airframe model, the stick model is quite simple yet efficient for predicting the vibration response at specified airframe locations; therefore, it has been used to estimate the dynamic or vibration responses of various rotorcrafts [21,22,23]. The present stick model uses 73 structural elements including 36 elastic beam elements determined from the convergence test for the normal mode analysis. The cross-sectional dimensions and material properties of the elastic beam elements for the stick model are appropriately assumed to match the target natural frequencies of an airframe structure. In this work, the natural frequencies in lower modes for the fuselage and wing of the conventional helicopter (UH-60A [24]), lift-offset compound helicopter (XH-59A [2]), and tiltrotor aircraft (XV-15 [22]) are considered as the target natural frequencies for the fuselage and wing of the present unmanned compound helicopter. The weights of various airframe components obtained from the conceptual design results are modeled as concentrated mass elements and distributed appropriately to match the location of the center of gravity of the aircraft. Since this study focuses on the vibrations of the fuselage and main wings, the horizontal and vertical tail wings are simply modeled as concentrated mass elements. There are two different stick models used in this work: one for the normal mode analysis model, with free-free boundary conditions, and the other for the ground vibration test (GVT) model. The normal mode analysis model in free-free boundary conditions is used as the reference model to the GVT model. Figure 10 shows the airframe stick model for the normal mode analysis and Table 2 summarizes the normal mode analysis results for the five lower modes of the airframe structure in free-free boundary conditions.

Airframe stick model for normal mode analysis (free-free boundary conditions)
2.3.2 Ground Vibration Test Model
Based on the stick model (Fig. 10), designed by normal mode analysis, a ground vibration test model is constructed to predict the 2/rev airframe vibration responses in flight. When the GVT model is used, the trim for the full aircraft is not required; thus, the analysis is much simpler than the rotor-airframe coupled analysis in free-free boundary conditions. The GVT model includes two bungee cables additionally to the normal mode analysis model given in Fig. 10. Frequency response analysis, using the vertical or lateral excitation of a 2/rev frequency, is performed to predict the natural frequencies of the airframe structure of the GVT model (Fig. 11). The geometric and material properties of cables are designed for the airframe structure of the GVT model in the frequency response analysis to express appropriately the rigid body modes and to obtain similar natural frequencies to those from the normal mode analysis, with free-free boundary conditions. As shown in Table 2, the natural frequencies of the present GVT model are excellent compared to those of the normal mode analysis model, with free-free boundary conditions. Therefore, it is proposed that the GVT model is appropriate for predicting the airframe vibration responses of the unmanned lift-offset compound helicopter in flight.

Frequency response analysis using ground vibration test (GVT) model
2.4 AVCS Simulation Framework
2.4.1 AVCS for Airframe Vibration Reduction
Figure 12 shows the concept of using the AVCS to reduce the airframe vibration responses of a helicopter. First, accelerometers measure (or predict) the vibration response signals at the specified airframe locations. Second, the closed-loop feedback controller determines the vibration cancellation signals with the same magnitude but opposite direction to the airframe vibration response signals. Finally, force generators (actuators) generate vibration cancellation forces to eliminate the airframe vibration responses. This study uses counter-rotating force generators (CRFGs) (① in Fig. 12). The CRFG generates the vibration cancellation force from the centrifugal forces of the eccentric masses on the two rotating and relatively angled disks, as shown in Fig. 13. The total weight of force generators is assumed to be 1.2% of gross-weight from the conceptual design. If four force generators are used, the weight of each force generator is obtained as 15.6 lb, which is a reasonable value considering the weight of a force generator used for the previous works [5, 6]. When the eccentric mass weight (11.19 lb) and rotating speed of the disk (17.48 Hz) are determined for a force generator, the maximum force can be also derived from the well-known formula for the centrifugal force along with an assumed value of radius (0.14 ft). Thus, the maximum force of one force generator in this study is designed as 606.1 lb. This maximum magnitude is not determined considering the airframe vibratory forces caused from airframe vibration responses, but simply designed using the above; however, it is believed that the magnitude of the maximum vibration cancellation force is appropriate, since the airframe vibration reductions using AVCS are satisfactory, which will be shown in Sect. 3.2.2. For the AVCS controller (② in Fig. 12), the Filtered-x Least Mean Square (Fx-LMS, [25]) algorithm is used as follows.

Concept of AVCS (Active Vibration Control System)

Schematic diagram of counter rotating force generator
The Fx-LMS algorithm (Fig. 14) determines the vibration cancellation signal to reduce the airframe vibration responses. The three acceleration signals are considered in the Fx-LMS algorithm, the airframe vibration response signal (y(n)), the vibration cancellation signal (ŷ(n)), which has the same magnitude and opposite direction to the airframe vibration response signal, and the error signal, e(n), is determined by summation of these two signals (y(n) and ŷ(n)). The numerical transfer function model (C) for the actual forward path (C*) is modeled as a linear time invariant (LTI) system. C* is a transfer function representing the dynamic characteristics of the actual actuator generated by the control input, and C is the transfer function of the vibration generated through the actuator at the accelerometer position. The control signal, u(n), is calculated by the vibration control algorithm using the error signal (e(n)). The error signal (e(n)) is defined as in Eq. (5):

Block diagrams for Fx-LMS algorithm
For minimization of the error signal, e(n), the cost function (K) is can be defined as follows:
where Q is the sensor weighting matrix and e(n)H is the conjugate transpose function of e(n).
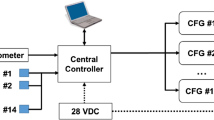
Further detailed explanations for AVCS can be found in the previous works [5,6,7]. The multi-input–multi-output (MIMO) model used for the present AVCS simulation consists of six accelerometer sensors and four force generators (CRFGs). The accelerometers are assumed to be located at the remote cockpit devices (node 4 in Fig. 10), wing root (node 10), and wing tip (node 35) to measure the 2/rev vibration responses in the vertical and longitudinal directions. It should be noted that a CRFG generates a vibration cancellation force in one direction only. The vibration reduction performance seriously depends on the locations of the CRFGs and the directions of their vibration cancellation forces; ten cases are considered to select the best case, which provides the maximum vibration reduction, as given in Table 3.
2.4.2 AVCS for Airframe Vibration Reduction
The AVCS with the Fx-LMS algorithm is modeled using MATLAB Simulink (Fig. 15). Reference theta (Block ① in Fig. 15) represents the 2/rev phase angle, which is the input value of the disturbance path model (Block ② in Fig. 15) and control algorithm. The disturbance path model shows the dynamic characteristics of the unmanned lift-offset compound helicopter airframe. The control algorithm consists of a forward path (block ③ in Fig. 15), which represents the dynamic characteristics of the actuator and a mathematical transfer function (block ④ in Fig. 15) of the actual actuators. The output signal (y(n)) of the disturbance path model is expressed as the 2/rev signal calculated by the vibration response analysis, using MSC.NASTRAN for the unmanned lift-offset compound helicopter airframe. In addition, to calculate the vibration cancellation force, the system identification coefficients of the mathematical transfer function of the forward path model must be calculated. The control system is assumed to be a linear time invariant (LTI) system and the system identification coefficients are calculated using the LMS update equation [5].

Block diagrams using MATLAB Simulink for AVCS
3 Numerical Results
3.1 Rotor Aeromechanics Analyses
The results using the advance airfoils in this section are quite similar to those given in the author’s previous work [14], since the two unmanned helicopter models used in the present study and previous work [14] are very similar to each other, except for gross-weight, as previously described. However, because the aeromechanical behavior of a lift-offset coaxial rotor is important for understanding the airframe vibration responses of the present unmanned compound helicopter, the performance and hub vibratory loads of a lift-offset coaxial rotor predicted by CAMRAD II are described in this section. Furthermore, the effects of airfoils on the performance and vibration of the lift-offset coaxial rotor are investigated.
3.1.1 Performance
Figure 16 shows the performance analyses of a lift-offset coaxial rotor for the present unmanned compound helicopter when two different airfoil sets are considered. As shown in the figure, the powers are quite similar to each other for the results with two airfoil sets as the flight speed increases. The rotor power decreases as the flight speed increases and is approximately zero above 200 knots, i.e., the rotor in high-speed flight is operated at a condition similar to wind-milling. However, the power of the two propellers increases significantly with the increase in flight speed region and most power is applied to the propellers for high-speed flight. These power analyses of the rotor and propellers are quite similar to the results of X2TD [4, 16]. The rotor effective lift-to-drag ratio (L/De) is shown in Fig. 17. The maximum value of L/De is obtained at a flight speed of 200 knots for both airfoil sets. When advanced airfoils are used, the maximum value of L/De (11.5) is similar to the maximum value of X2TD [4, 16]. This aerodynamic performance is almost twice that of conventional helicopters. When NACA00xx airfoils are considered, the maximum value of 10.06 is also good but is 12.5% lower than the results using the advanced airfoil results. The rotor aerodynamic performance (L/De) using the advanced airfoils outperforms that with NACA00xx airfoils as the double-ended DBLN526 airfoil, used in the blade inboard region of the advanced airfoil sets, may reduce the drag on the rotor retreating side [1], compared to the NACA0026 airfoil.

Power of rotor and propellers

Rotor effective lift-to-drag ratio
3.1.2 Hub Vibratory Loads
Figure 18a shows the rotor vibration index (VI) calculated using Eq. (4) when the cross-over angle is 0°. For the advanced airfoil results, the rotor vibration increases as the flight speed increases and flattens at flight speeds of 200–230 knots. However, VI decreases the flight speed above 230 knots as the rotor lift force decreases and is small in this flight speed region, as shown in Fig. 7. The variation in rotor VI using the advanced airfoils in the present work is slightly different from that given in the authors’ previous work [14]. When NACA00xx airfoils are used, the trend of rotor VI is similar to that with the advanced airfoils; however, its maximum value (0.22) at 230 knots is 15.79% higher than the corresponding value using the advanced airfoils (0.19). Thus, it is considered that the advanced airfoils improve aerodynamic performance (L/De), as shown in Fig. 17, but decrease the rotor vibration compared to NACA00xx airfoils. Therefore, in later sections, only the lift-offset coaxial rotor using the advanced airfoils is considered. In addition, it has been predicted in previous work [16] that rotor VI of the X2TD was maximum at a flight speed of 250 knots, which is the maximum flight speed of X2TD; however, the maximum vibration of a lift-offset coaxial rotor in this study is obtained at a flight speed of 230 knots. Therefore, the airframe vibration responses and the vibration reduction using AVCS at 230 knots will be discussed in later sections. The 2/rev hub vibratory load components of the present lift-offset coaxial rotor calculated by CAMRAD II are given in Fig. 18b when the advanced airfoils are used at 230 knots. There are the hub axial (Fx2P) and vertical (Fz2P) vibratory forces and the hub pitch vibratory moment (My2P) only because of the inter-rotor cancellation with a cross-over angle of 0° [7, 14, 16].

Hub vibratory loads of the lift-offset coaxial rotor
3.2 Airframe Vibration Reduction Using AVCS
3.2.1 Airframe Vibration Response at 230 Knots
To investigate the 2/rev vibration responses of the unmanned lift-offset compound helicopter at 230 knots, 2/rev hub vibratory loads (Fx2P, Fz2P, and My2P) of the lift-offset rotor (with the advanced airfoils) calculated by CAMRAD II analysis are applied to the rotor (node 24) of the GVT model (Fig. 19). The 2/rev vibration responses in the longitudinal and vertical directions are calculated at the specified locations of the airframe, such as the remote cockpit devices, fuselage and shaft joint, wing root, and wing tip (Table 4). As summarized in the table, the 2/rev vibration at the remote cockpit in the vertical direction is the most severe, which is much higher than that of the conventional helicopter. Therefore, airframe vibration reduction is required.

GVT model for airframe vibration response analysis
3.2.2 Airframe Vibration Response at 230 Knots
Figure 20 shows the 2/rev vibration response reductions using AVCS, for the ten cases defined in Table 3. The baseline represents the 2/rev airframe vibration responses of the unmanned lift-offset compound helicopter without AVCS. The weights of the CRFGs are included in the finite element model for the airframe structure. To evaluate the vibration reduction performance using the AVCS, Eq. (7) is used:
where J is the cost function, ri is the percent change in the 2/rev vibration response reduction of the ith accelerometer, and wi is the ith weighting factor. The reduction in the longitudinal vibration response at the wing tip (Acc3) is most difficult to achieve in this paper. Therefore, the cost function (J) is evaluated using w3 = 0.25 for Acc3 and wi = 0.15 for the other accelerometers with i = 1, 2, 4, 5, 6. As seen in Fig. 20, when the AVCS is applied to the airframe, most of the 2/rev vibration responses are moderately or significantly reduced at all of the considered locations and directions; this is true for all cases, except longitudinal vibration at the wing tip (Acc3). Vibration reduction using the AVCS is summarized in Table 5. The value of J (93.54%) for Case 2 is largest and it is considered that Case 2 (Fig. 21) is the best model for reducing the 2/rev vibration responses of the airframe using AVCS. Figure 22 shows the 2/rev vibration responses reduced by AVCS with Case 2, which is selected as the best case, as previously discussed. The 2/rev vibration responses at the six accelerometers are reduced by 81.39–99.93% from the baseline response without AVCS. In particular, the vertical vibration response at the pilot seat (Acc4) is almost eliminated (by 99.93%), as seen in Fig. 22d. In addition, the longitudinal vibration reduction at the wing tip (Acc3) is the worst in Case 2, although the vibration is reduced from the baseline result, as shown in Fig. 22c. However, this reduction is reasonable and acceptable, since the reduced vibration response has an amplitude of 0.017 g, which is lower than the target value for airframe vibration reduction of the X2TD using AVCS, i.e., 0.1 g [4].

Case study results for 2/rev airframe vibration response reductions using AVCS (230 knots)

Vibration response analysis model using AVCS (Case 2)

Reduced 2/rev airframe vibration responses using AVCS at 230knots (Case2)
4 Conclusion
In this numerical simulation study, the 2/rev airframe vibration responses of the lift-offset compound helicopter were reduced using AVCS at a flight speed of 230 knots. The lift-offset compound helicopter in this work used not only a lift-offset coaxial rotor but also wings and propellers for high-speed flight. The 2/rev hub vibratory loads of a lift-offset coaxial rotor were predicted using CAMRAD II. The airframe structure was represented using the one-dimensional stick (elastic line) model and its vibration responses were calculated by MSC.NASTRAN. The AVCS, using four force generators (CRFGs) and six accelerometers, was applied to reduce the longitudinal and vertical vibration responses at the specified airframe locations, such as the remote cockpit device, wing root, and wing tip. The vibration cancellation forces of the CRFGs were determined by the Fx-LMS algorithm and the AVCS simulation framework was constructed using MATLAB Simulink.
When various CRFG locations and different vibration cancellation force directions were considered for ten cases, Case 2 was selected as the best, which reduced the airframe vibration responses by 81.39–99.93% from the baseline vibration responses, without the application of AVCS. Through the present work, it was determined that the AVCS could successfully reduce the vibration responses at both the fuselage and wings of the unmanned lift-offset compound helicopter under high-speed flight conditions.
References
Bagai A (2008) Aerodynamic design of the X2 technology DemonstratorTM main rotor blades. In: 64th American Helicopter Society Annual Forum
Ruddell AJ (1981) Advancing blade concept (ABC) technology demonstrator. USAAVRADCOM-TR-81-D-5
Blackwell R, Millott T (2008) Dynamics design characteristics of the sikorsky X2 TechnologyTM demonstrator aircraft. In: 64th American Helicopter Society Annual Forum
Walsh D, Weiner S, Arifian K, Lawrence T, Wilson M, Millott T, Blackwell R (2011) High airspeed testing of the sikorsky X2 TechnologyTM demonstrator. In: 67th American Helicopter Society Annual Forum
Kim D-H, Kim T-J, Jung S-U, Kwak D-I (2016) Test and simulation of an active vibration control system for helicopter applications. Int J Aeronaut Sp Sci 17(3):442–453
Kim D-H, Kwak D-I, Song Q (2019) Demonstration of active vibration control system on a Korean Utility Helicopter. Int J Aeronaut Sp Sci 20(1):249–259
Lee Y-L, Kim D-H, Park J-S, Hong S-B (2020) Vibration reduction simulations of a lift-offset compound helicopter using two active control techniques. Aerosp Sci Technol 106:Article 106181
Millott T, Goodman R, Wong J, Welsh W, Correia J, Cassil C (2003) Risk reduction flight test of a pre-production active vibration control system for the UH-60M. In: 59th American Helicopter Society Annual Forum
Goodman R, Millott T (2000) Design, development, and flight testing of the active vibration control system for Sikorsky S-92. In: 56th American Helicopter Society Annual Forum
Rangacharyulu MA, Moore MJ (1991) Flight vibration testing of the V-22 Tiltrotor aircraft. In: 47th annual forum of the American Helicopter Society
Johnson W (2012) CAMRAD II: comprehensive analytical method of rotorcraft aerodynamics and dynamics. Johnson Aeronautics, Palo Alto
Liu Y, Han J, Xue Z, Zhang Y, Yang Q (2019) Structural vibrations and acoustic radiation of blade–shafting–shell coupled System. J Sound Vib 463:Article 114961
Yeo H, Chopra I (2001) Coupled rotor/fuselage vibration analysis for teetering rotor and test data comparison. J Aircr 38(1):111–121
Kwon Y-M, Park J-S (2020) Performance and airloads analyses for a rigid coaxial rotor of high-speed compound unmanned rotorcrafts. J Korea Inst Milit Sci Technol 23(4):311–318
Jacobellis G, Anusonti-Inthra P, Gandhi F (2018) Investigation of blade loads on a modern high-speed lift-offset coaxial helicopter using coupled computational fluid dynamics/computational structural dynamics. American Helicopter Society International Aeromechanics Specialists’ Meeting
Kwon Y-M, Park J-S, Wie S-Y, Kang HJ, Kim D-H (2021) Aeromechanics analyses of a modern lift-offset coaxial rotor in high-speed forward flight. Int J Aeronaut Sp Sci 22(2):338–351
Drela M (1996) A user’s guide to MSES 2.95, MIT Computational Aerospace Science Laboratory
Chopra I (2018) Design and testing of scaled rotor models. In: 7th Asian/Australian Rotorcraft Forum, Short Course Note
Klimchenko V, Baeder JD (2020) “CFD/CSD study of interactional aerodynamics of a coaxial compound helicopter in high-speed forward flight. AIAA Scitech 2020 forum
Lim JW (2015) Consideration of structural constraints in passive rotor blade design for improved performance. Aeronaut J 119(1222):1513–1539
Abhishek A, Chopra I, Purekar A, Wang G, Phan N, Semidey R, Liebshutz D (2012) Rotor load prediction using coupled rotor/fuselage model and sensor data. In: 68th American Helicopter Society Annual Forum
Colombo F, Muscarello V, Quaranta G, Masarati PA (2018) Comprehensive aerosevoelastic approach to detect and prevent pilot assisted oscillations in tiltrotors. In: 74th American Helicopter Society Annual Forum
Dompka RV (1989) Investigation of difficult component effects on finite element model vibration prediction for the Bell AH-1G helicopter. NASA CR 181916
Howland GR, Durno JA, Twomey WJ (1990) Ground shake test of the UH-60A helicopter airframe and comparison with Nastran finite element model predictions. NASA CR 181993
Elliott SJ, Nelson PA (1993) Active noise control. IEEE Signal Process Mag 10(4):12–35
Acknowledgements
This work was conducted at High-Speed Compound Unmanned Rotorcraft (HCUR) research laboratory with the support of Agency for Defense Development (ADD). This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2020R1I1A3071793). This work was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korea Government (MSIT) (2021R1A5A1031868).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hong, SB., Lee, YL., Kwon, YM. et al. Airframe Vibration Reduction for an Unmanned Lift-Offset Compound Helicopter Using Active Vibration Control System. Int. J. Aeronaut. Space Sci. 23, 102–114 (2022). https://doi.org/10.1007/s42405-021-00426-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42405-021-00426-3