
Abstract
The research on the hardware drive circuit of electro-hydraulic servo controller for aircraft steering gear is carried out by means of functional analysis, principle design, circuit simulation and test verification. Firstly, the function analysis and principle design of the drive circuit are carried out from the level of electro-hydraulic servo control system and the control architecture of DSP(Digital Signal Processing)+DAC (Digital To Analog Converter) is defined in the design. Using discrete devices to build analog drive circuit, drive output and feedback, and finally form a closed-loop control current-type drive output mode. The mathematical model of the analog drive circuit is established, and the relationship between the drive output current and the control volage is obtained. The circuit simulation model is set up to verify the correctness of the circuit mathematical model. Finally, the controller hardware drive circuit is verified by setting up the test environment.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Aircraft steering gear
- Electro-hydraulic servo controller
- Hardware drive circuit
- Mathematical model
- Simulation model
1 Introduction
With the increasing maturity of aviation technology and the gradual complexity of aviation equipment, the requirements for aircraft control system are becoming higher and higher [1]. Steering gear is one of the key components of the flight control system [2, 3], and its performance will directly affect the flight control accuracy and flight safety of the aircraft [4,5,6]. At present, aircraft steering gear mainly uses electro-hydraulic servo control system [7], which has the advantages of mature technology, high power density, fast response speed, wide speed regulation range and good environmental tolerance [8, 9]. Therefore, it is of great significance to reasonably design the electro-hydraulic servo system of steering gear adapted to the changes of aircraft flight environment, which can not only effectively improve the working capacity of relevant equipment in the aircraft, but also increase the safety factor of the aircraft [10, 11].
The electro-hydraulic servo control system of steering gear takes the servo controller as the control core and the electro-hydraulic servo valve as the direct control object [12]. The controller hardware drive circuit directly controls the size and direction of the servo valve spool through the output drive current. According to the impedance characteristics of electro-hydraulic servo valve, the equivalent treatment is carried out, focusing on the design and research of the hardware drive circuit of electro-hydraulic servo controller.
2 Theoretical Research
2.1 Functional Description
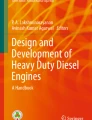
According to the function analysis of the controller hardware drive circuit, the functional block diagram is designed as shown in Fig. 1.

Controller hardware drive circuit function diagram
In Fig. 1, EHSV is represented as electro-hydraulic servo valve. To describe the circuit function:
-
(1)
Operators input operation instructions to DSP through upper computer;
-
(2)
DSP collects analog drive circuit feedback signal 1 and electro-hydraulic servo valve feedback signal 2;
-
(3)
DSP makes closed-loop calculation by docking with the received upper computer instruction and feedback signal 1;
-
(4)
DSP transmits the closed-loop operation result to DAC through SPI, so as to output voltage signal;
-
(5)
The DAC output voltage signal is converted by the analog driving circuit, and the corresponding driving current is output;
-
(6)
EHSV (electro-hydraulic servo valve) makes corresponding actions under the action of driving current;
2.2 DAC Circuit Design
As A voltage-output DAC with SPI serial input interface, the chip has two output channels A and B, four control bits and 12 data bits, and its differential nonlinearity is less than 0.5LSB Typ. The data functions are shown in Table 1.
The DAC data function table is explained as follows:
- P1 = 0, P0 = 0:
-
Write data to DAC B and buffer;
- P1 = 0, P0 = 1:
-
Write data to buffer;
- P1 = 1, P0 = 0:
-
Write data to DAC A and update DAC B with buffer data;
- P1 = 1, P0 = 1:
-
Write data to register;
- SPD = 1:
-
Fast mode;
- SPD = 0:
-
Slow Mode;
- PWR = 1:
-
Power down;
- PWR = 0:
-
normal operation;
Output voltage calculation formula:
In formula (1), VREF is 1.5 V voltage reference source and external input is adopted. CODE is the CODE value input by DSP to DAC through SPI. 0X1000 is a 12-bit full-scale hexadecimal code value. DA is the DAC output voltage, and the code value needs to be converted to decimal value during calculation (Fig. 2).

DAC schematic diagram
2.3 Analog Drive Circuit Design
2.3.1 Functional Analysis
The analog drive circuit is divided into three parts by function:
-
(1)
N1, N2 operational amplifiers and resistance of the amplifier circuit, its function is to amplify the DA input value according to a certain proportion.
-
(2)
Push pull circuit composed of Q1, Q2 triode and resistor, its function is based on positive and negative potential values VF relative to AGND, providing corresponding drive current for external loads (note: the direction of current flowing through resistor R from point N to point M is positive).
-
(3)
The amplifier circuit composed of N3 operational amplifier and resistance, its function is to collect VD point voltage value according to a certain proportion of amplification, and the output voltage VK as a feedback signal 1 transmission to DSP.
2.3.2 Schematic Diagram Designing
The DAC input voltage signal is converted to drive current by the analog drive circuit. The external load of the analog drive circuit is the electro-hydraulic servo valve. The analysis of the electrical characteristics of the electro-hydraulic servo valve can be equivalent to the load characteristic of 103Ω power resistance. According to the design requirements, the driving current flowing through the electro-hydraulic servo valve is in the range of (−40 ~+ 40) mA, and the circuit can collect the output current, and transmit it to DSP as a feedback signal for closed-loop control. Based on the above analysis, the schematic diagram of the simulated driving circuit is designed as shown in Fig. 3.

Analog drive circuit schematic diagram
Analysis of Fig. 3 shows that:
where: VA, VB, VC, VD, VE, VK denote voltage values of point A, B, C, D, E, K relative to AGND. DA represents the input voltage of analog drive circuit. IRL represents the drive current flowing through the external load.
2.3.3 Mathematical Modeling
According to the driving current required by the external load, set the DAC output voltage value and the resistance value in the circuit reasonably. The resistance value of the analog driving circuit is set as shown in Table 2.
The mathematical model of IR and DA can be obtained according to the resistance value of the resistor set and the basic operation rule of the operational amplifier circuit, as shown in formula (5). The mathematical model of VK and IRL is shown in Eq. (6).
3 Simulation Analysis
3.1 Simulation Parameter Setting
According to Eq. (5), the mathematical relationship between the output driving current IRL and the input voltage DA of the driving circuit to the external load is obtained. According to Eq. (6), the relation between the feedback signal VK of the drive circuit and the drive current IR is obtained. Based on this relationship, the forward maximum driving current of 40 mA, reverse maximum driving current of −40 mA and zero current of 0 mA are set respectively, and their corresponding input voltage value DA and feedback voltage value VK are shown in Table 3.
3.2 Simulation Model Construction
In order to verify the correctness of the mathematical model of the analog drive circuit and the validity of the data in Table 3, a circuit model is built in the simulation software Multisim for simulation, as shown in Fig. 4. According to the group 1, 2 and 3 DA values in Table 3 as the input voltage, the simulation data of output current value IR and feedback voltage value VK obtained are shown in Table 4.

Analog drive circuit simulation diagram
3.3 Analysis of Simulation Result
By comparing the data in Tables 3 and 4, it can be seen that the IR deviations of the three data groups are 0 mA, 0.00297 mA and 0 mA respectively. The VK deviations were 0.02 V, 0.371 mV and 0 V, respectively. The relative values of deviations were all less than 0.6%, which could be ignored. Therefore, the correctness of the mathematical model of the analog drive circuit can be proved, and the rationality of the design of the analog drive circuit can be proved.
4 Experimental Verification
4.1 Setting up Test Environment
The test environment is built according to the simulation results, as shown in Fig. 5. The test instruments and tools corresponding to the digital label in Fig. 5 are shown in Table 5.

Hardware drive circuit test environment
4.2 Test Procedure
-
(1)
Complete the circuit connection without power output, adjust the power output voltage to the required value, confirm the connection is correct, and then power on.
-
(2)
The corresponding codes of DA value are configured in the software code, and burned into THE DSP through the upper computer and the emulator.
-
(3)
Use an electronic multimeter to measure the voltage VR and corresponding VK at both ends of the power resistor R under different input voltages of the drive circuit (feedback signal 1), and record the data;
-
(4)
Calculate the current flowing through the power resistor R according to Ohm's law and record the data;
The data recorded and calculated during the above tests are shown in Table 6.
4.3 Analysis of Test Results
-
(1)
There is a certain deviation between the test data in Table 6 and the preset data in Table 3. The IRL deviation of the three groups is 0.18 mA, 0.01 mA and 0.2 mA respectively, and the relative error is no more than 1%, and the one that meets the design requirements is no more than 1%. The VK deviations were 0.01 V, 0.001 V and 0.01 V, respectively, and the relative errors were less than 1%.No more than 1% meet the design requirements.
-
(2)
Through the analysis of simulation data and test data, it can be seen that the test data have a large deviation. The reason for this phenomenon is that there are certain unfavourable factors such as leakage current and certain tolerance of resistance in operational amplifier and triode in actual circuit. These parameters have an impact on the output accuracy, and the impact will continue to increase as the temperature of the component rises. Therefore, heat dissipation treatment should be done during PCB design.
5 Conclusion
-
(1)
Hardware drive circuit design of electro-hydraulic servo controller of aircraft steering gear adopts the closed-loop control current-type drive output architecture of DSP+DAC+analog drive circuit to meet the functional design requirements.
-
(2)
Although there is some deviation between the test data and the preset value in Table 3, the relative error of all data is less than 1%, meeting the output accuracy requirements.
-
(3)
Within the linear output range of the operational amplifier, the driving current provided by the analog driving circuit to the external load is not affected by the external load.
-
(4)
Within the linear output range of the operational amplifier, the driving current and its feedback value provided by the analog driving circuit to the external load are positively linear correlated with the input voltage value.
References
Tan, C.W.: Research on the plane steering controller. Hunan University, Changsha (2015)
Li, J., Tang, G.C., Cao, J.F., et al.: Thermodynamic analysis and calculation on hydraulic steering units of aircraft hydraulic system. China Mech. Eng. 26(15), 1–2 (2015). (in Chinese)
Liu, Z.W.: Research on electro-hydraulic servo loading system of aircraft steering gear based on BP-RBF neural network. Sci. Technol. Innovat. 9, 1–2 (2017)
Chen, X.C.: Airborne hydraulic steering gear servo system optimization control research and simulation. Comput. Simul. 29(6), 1–2 (2012). (in Chinese)
Hu, L.M., Cao, K.Q., Su, X.B., et al.: Research on fault simulation of hydraulic actuator for horizontal tail of an aircraft. Mach. Tool Hydraul. 44(13), 1–2 (2016). (in Chinese)
Hu, L.M., Cao, K.Q., Xu, H.J.: Typical fault analysis for four redundant steering engines. Chin. Hydraul. Pneumat. 6, 1–2 (2006). (in Chinese)
Wei, K.P., Hu, J., Yao, J.Y., et al.: Fast terminal sliding mode control of neural network for aeromechanical actuator. Acta Aeronaut. Astronaut. Sin. 42(6), 1–2 (2021). (in Chinese)
Li, Y., Hao, S.Q., Wang, F.Q., et al.: Design of on-board model monitoring for electro-hydraulic servo system of aeroengine. Aeroengine 47(2), 1–2 (2021). (in Chinese)
Wu, J.L., Zhang, J., Jin, L.S., et al.: Modeling and analysis of servo control of aeroengine actuator cylinder. Aeroengine 45(2), 1–2 (2019). (in Chinese)
Huang, X.X., Long, Y., Zhang, Z.L., et al.: Summarization of distributed visual simulation technology. J. Syst. Simul. 22(11), 1–2 (2010). (in Chinese)
Liu, X.L., Su, Y.: Application of artificial bee colony algorithms in aircraft steering electro-hydraulic servo system. Sci. Technol. Eng. 20(30), 1–2 (2020). (in Chinese)
Huang, J.L.: Design of dual-core CPU hydraulic servo controller based on DSP. Xi an Polytechnic University, Xian pp. 1–2 (2017) (in Chinese)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 Chinese Aeronautical Society
About this paper

Cite this paper
Pinqing, F., Wenjun, C., Feng, Y. (2023). Research on Hardware Drive Circuit of Electro-Hhydraulic Servo Controller for Aircraft Steering Gear. In: Chinese Society of Aeronautics and Astronautics (eds) Proceedings of the 10th Chinese Society of Aeronautics and Astronautics Youth Forum. CASTYSF 2022. Lecture Notes in Electrical Engineering, vol 972. Springer, Singapore. https://doi.org/10.1007/978-981-19-7652-0_3
Download citation
DOI: https://doi.org/10.1007/978-981-19-7652-0_3
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-7651-3
Online ISBN: 978-981-19-7652-0
eBook Packages: EngineeringEngineering (R0)