
Abstract
The main drivers of engine development are fuel economy and very high emission standards that need tighter control of fuel injection during the highly transient automotive cycle. For long, the responsibility is surrogated by mechanical controllers to high speed digital controls that are electronic. The intimate control of injection pressure injection timing, rate of injection and most importantly the number of injection pulses per cycle are controlled by the ECU, not only for limiting the engine-out emissions or reducing fuel consumption, but also for control of noise and after-treatment system. This chapter gives an overview of common rail injection system and working of the electronic injector, listing their advantages. The features of electronic control unit (ECU) are air charge management, torque set-point function, torque limitation function, engine speed control, engine position management, metering unit control and pressure relief valve control as well as fault diagnostics and on-board diagnostics are discussed. The engine management system has inputs, outputs, sensors and actuators apart from sensors and the pedal module. In the latest on-board diagnostic requirements, there is a need for monitoring rationality of sensor signals and total functional failure are important for detecting total breakdown of the system (such as loss of after-treatment device, EGR cooler or charge air cooler) or a component, or loss of a component like the catalyst. Inducement strategies of low level, maximum vehicle speed and OBD disablement, and electronic control of after-treatment system and EGR as well as OBD I and OBD II needs are treated at the end of the chapter. The topics on development process of an ECU, hardware-in-loop, software-in-loop, verification on vehicle for series production, production code generation and closed loop control mechanism are briefly dealt with.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

1 Introduction
The evolution of diesel fuel injection equipment has evolved over years from being mechanically regulated at the pump, to electronically governed at the injector in the common rail systems. This enabled controlling fuel injection so precisely that multiple injections of different durations separated by small predetermined intervals are possible to limit nitric oxides and particulate matter in cylinder, and to bound the diesel noise. What is more, to satisfy the highest emission standards like India BS VI (closely related to European Euro-6 steady state values, Fig. 22.1) very little treatment of exhaust is necessary.

Emission standards in India
2 Outline of Common Rail Fuel Injection System
In order to deal with the tail pipe emissions, the control and aftertreatment strategies adopted are: the high NOx or medium NOx or low NOx at the engine-out. The common rail injection system consists of many components integrated as shown in Fig. 22.2. The fuel from the tank is connected to fuel pump through a fuel filter. Then, a gear pump pressurizes the fuel, which in turn is connected to an accumulator (rail) via a high-pressure fuel line. The accumulator holds the fuel at high pressure. The rail pressure is maintained independent of the engine speed, as programmed. The rail is connected to fuel injectors in the cylinder heads and the fuel is delivered to the combustion chambers. The leak off connections from the accumulator, the injectors and the main fuel pump to the tank, release the excess fuel back to the tank.

Common rail injection system architecture
The rail pressure sensor on the accumulator is used for the metering the fuel by the unit at the low-pressure side of the pump to maintain the required value through a closed loop mechanism. This saves substantial pumping energy, which otherwise would be lost as heat if the metering is carried out at the high-pressure side of the fuel injection system. In addition, there is a pressure relief check-valve on the rail which kicks open if the rail pressure increases beyond the set limit of the rail by safely leaking the fuel back to tank. In some systems, there is an electrically controlled valve which is a part of rail for controlling the fuel pressure and avoid fuel starvation.
The injectors are controlled through solenoid valves by a microprocessor in the ECU for varying timing for attaining the required quantity of fuel delivery. Since the metering unit is located on the low-pressure side, there is a need for separate fuel pump to maintain the fuel requirement on the suction line. The suction pressure is maintained by a gear pump which is, usually, a part of the main fuel pump.
Advantage of the Common Rail Fuel Injection System
-
1.
It develops high injection pressure programmable up to 2500 bar.
-
2.
Dynamic start of injection timing can be easily programmed.
-
3.
For each triggering condition per cycle, there can be many shots such as pilot, main and post injections. For BS-III, -IV and -V (Euro-3, 4 and 5) usually three injection pulses are satisfactory. However, for BS-VI, at least four pulses may be necessary. Higher emission standards may require up to nine shots.
-
4.
It enables increase in the specific power per cylinder, reduction of engine noise, and decreases the emissions; further, it helps in late injection for thermal management of the exhaust catalysts.
3 Electronic Control of Diesel System
The electronic control of diesel, Fig. 22.3, comprises of an electronic controller, sensor inputs and actuators outputs. The controller consists of a microcontroller, an oscillator for clock speed and analog to digital converters for inputs with necessary Application Specific Integrated Circuit (ASIC) for amplification. The output has various integrated circuits for pulse width modulation (PWM) and driving circuits for actuators in injectors and other components. Apart from this, several memories are incorporated in the controller.

Basic ECU architecture for input and output requirements
-
1.
The software memory (EEPROM, electrically erasable programmable read-only memory) where the program code of all functions is stored, and reusable through flashing.
-
2.
The data memory (RAM, random access memory) in which data are stored for the calibration purposes. This is highly useful during the development.
Electronic diesel control is subdivided into three major parts, Fig. 22.3:
-
1.
Analog inputs from sensors in combination with integrated circuits (IC) are detected and evaluated as the physical parameters such as engine speed and coolant temperature sensor, vehicle-driver input through throttle sensor etc.
-
2.
Switch state evaluation of digital inputs such as ignition key input, power take-off (PTO), starter key status etc. and further conversion from electrical signals to physical variables in the maps, tables and conditions of the programme.
-
3.
The electronic controller processes the data of the inputs and evaluates the functions internally, based on algorithms such as closed loop or open loop architecture. The outputs are power-amplified suitable for various actuators in the injectors, after-treatment systems etc., for achieving the desired performance. Besides these, the controller communicates with other units such as external vehicle controllers and diagnostic devices, which are networked.
-
4.
The actuators perform the mechanical actions based on the controller functions (e.g. the solenoid valve for the fuel injection system) which are defined as logic parameters.
3.1 Features of the Electronic Control Unit (ECU)
The following features are to be mapped while deciding the input and output configuration.
-
(1)
Air Charge Management
Hot Film Mass sensor (HFM) or Absolute-Pressure Flow (PFA) sensor estimates robustly the air charge for closed loop EGR Control. Many algorithms use PFA based approach as loss in the pressure related to orientation and pulsation can be avoided. EGR is controlled in static and dynamic conditions by the different control maps for better performance emissions. Setting zero position at every after-run period to compensate for the wear and tear of the EGR valve in long run and any analog drift, helps in achieving the precise valve position by using EGR learning function. EGR refreshment for cleaning the soot particulate deposit on the EGR valve is programmed.
Alternatively, the boost pressure cum temperature sensor is used for evaluating the air flow and for calculating in the lambda for governing fuel quantity in steady and transient conditions. For better emission and performance at various ambient pressure and temperature as well as at different operating conditions, the special control features are used: control of turbocharger actuator, e.g., electrical wastegate control or variable geometry turbine, and control the grid heater for intake air heating. The latter feature reduces white smoke and improves startability by reading the coolant temperature, the battery voltage for proper operation.
-
(2)
Torque Set-Point Formation
The set point is achieved through driver demand (sensed through accelerator pedal or throttle sensor) and is visualized in the software through fuel quantity based or torque-based approaches. Torque based control is suitable for realizing the vehicle requirement using direct correlation of vehicle or engine performance. The special features in the functions of the vehicle controls are cruise control, power take off (PTO), engine braking, and gear dependant torque limitation. The gearbox intervention function transfers the information of the engine specific parameters to automatic manual transmission for enabling gear advisory mechanism, vehicle dynamic control interventions such as antilock braking system (ABS) or electronic stability control for braking (ESC) used to avoid wheel lock while braking. Additionally, the SCR control transfers the data for attaining the required performance and emissions while dosing urea, or while controlling temperature for light-off, based on the exhaust mass flow, NOx concentration etc.
-
(3)
Torque Limitation Function
This function is laid out on torque limitation structure according to the various conditions in the interface as shown in Fig. 22.4. It is carried out depending on the gear status to avoid damage by overloading due to mismatch between engine power train and gear box power train. More functions associated with the ECU are overheat protection, limitation of engine torque or speed, quantity limitation, limitation dependent on ambient pressure and temperature at high altitudes, and sub-zero temperatures, Fig. 22.4.

Torque limitation structures (Gerhardt et al. 1998)
The overheat protection works by restricting the required torque and specific injection quantity by sensing temperatures of coolant or fuel or oil. In many cases, two or more protections are implemented for reliable performance. The torque limitation is deployed when either a component fails or the engine functions improperly. Quantity limitation is helpful in matching the hydraulic performance and fuel delivery of the pump. This is further converted to torque value and applied to the overall torque output by selecting the minimum of different torque limits evaluated. As indicated above, it is also included in the startability control (based on coolant temperature) as well as for reduced white smoke at high altitudes or sub-zero temperatures. The smoke limitation is based on lambda either by reduced or increased fuel quantity. During starting, therefore, quantity-based function may be preferred to torque based function. The quantity for smoke limitation is incorporated for transient and steady state operations as well.
-
(4)
Engine Speed Control
High speed and low speed demand function an essential requirement, is achieved through a closed loop speed control by feedback from the engine speed-sensor for governing the speed close to the target speed within a specified tolerance. Governing is possible using proportional, integral and derivative (PID) gain control, with tracking for the saturation. The major challenge with the integral is either to reset the integral gain for every change of speed or load, or to work with low integral gain constant. With engine speed sensor, different functions such as synchronization, external speed limitation during diagnostic malfunction, external speed control through diagnostic tool or scan tools.
The synchronization is carried out with cam speed sensor for matching with the trigger wheel for identification of engine TDC (top dead centre). The speed limitation demand is set while carrying out the vehicle speed limitation in case of sensor faulty state. The external demand from diagnostic tool for enhancing the limits of low idle or high idle speed for compensating the variation in the field.
-
(5)
Engine Position Management
The inductive speed sensor is mounted on the flywheel housing. It reads a toothed wheel mounted on the flywheel and evaluates the speed and synchronizes with camshaft sensor. When any one of the sensors fails, the engine speed is evaluated in redundant mode or backup mode. When the cam sensor is defective, the engine speed is determined in backup mode; the TDC position is detected by implementing a test injection. When the crank sensor is defective, the engine should run in the redundant engine mode, with the cam sensor.
-
(6)
Injection Control
The solenoid valve in the injector activates it fast and controls the injection. The dynamic timing with respect to the TDC is achieved for all injection events namely, the main, the pilot and the post injection so on either with reference to the start of main injection for pilot and end of main injection for the post, or TDC position is the reference for all the events. In case the pilot, main and post injections overlap, there is a safety is built-in for saturation of injection duration for each injection mode or the secondary injections (pilot or post) are shut off after activating the error for later reference.
-
(7)
Metering Unit Control
This unit controls the fuel from the fuel filter to the rail for attaining the required pressure. It is in closed loop control with rail pressure sensor.
-
(8)
Pressure Relief Valve Control
There are two types of pressure relief control valves. The hydraulic pressure relief valve opens against a spring force to dampen the pressure waves in the rail. The second type is operated by the ECU.
Fault Diagnostics and On-Board Diagnostics with IUPR
The ECU monitors the failure of the components and systems connected with it for faults. On detection, the ECU activates the malfunction indicator lamp (diagnostic lamp) on the instrument cluster, and displays the diagnostic messages on the graphical display. If the faults relevant to emissions or safety are severe, the algorithm activates the torque limitation along with an indication to the operator. The details of diagnostics including in use performance ratio (IUPR), is explained later.
Control Area Network (CAN)
CAN is used mainly for communicating messages between master and slave controllers or any two controllers as per SAE J1939 standard protocol. All electronic control units have equal rights. The communication between controllers are carried out in bidirectionally. Alternatively, the information can be broadcasted and received by all the connected devices. If the communication happens from only one unit at a given time, then it is called asynchronous mode of communication. The transmission rate of K-line can be as high as 250 kbps. The communication happens also through CAN calibration protocol (CCP) protocol. CCP allows data communication between units at one Mbps for higher payloads than K-Line. Both the protocols are widely used in the automotive industries.
Message Formatting of KWP (K) Line
The message is formatted in KWP protocol, Fig. 22.5. It starts with the header bytes followed by data bytes and checksum bytes.

Message formatting of KWP (K) Line protocol (Bosch 2014)
Header Bytes
Of the four bytes, the first represents format byte (8 bits). The first two bits (A0, A1) provide the address of the message. Whereas, the remaining six bits (L0–L5) give the amount of data to be transferred from the source to destination. Initially, it is set to zero and then the pay load bytes are coded using the length bytes. The target address byte (Tgt) provides the designation address. Source byte (Src) identifies the source address from where the communication is initiated. The length byte allows to specify the payload of data transfer and it is up to 255 bytes. It can be specified in the format byte (fmt) up to 63 bytes. The check sum byte is positioned at the end of the data transfer byte. The byte is calculated as the modulo sum of every byte in the transferred data.
Initialisation
In the initialization, the format is communicated with key bytes from electronic units to the tester. There are two types of initialisation: functional initialization and physical initialization. In the former, only one electronic unit is initialised along with message address whereas in the latter, the address of all the electronic control units as a group are initialised. This is possible with common transmission timing and the same baud rate along with same protocol.
Arbitration
This is applicable for K-Line communication protocol. It is used to detect the message collision while transmitting from source to destination and to prevent the collision of the messages when the function is initialised. At the falling edge of a message, the controller detects the waiting time for data transfer after a minimum time and identifies it as data transfer with another controller and it is active.
3.2 CAN on Communication
The CAN communication is widely used and replaced of K-Line protocol. The CAN protocol provides quicker response than K-Line for data transfer from 250 kb/s to 1 Mb/s. The necessary hardware interface required for communication with electronic units is available in most of the components. This bus system can also be used for communicating with diagnostic tools.
The tester communication follows ISO 15765 protocol standard. The fundamental difference between the K-line versus CAN is formatting the data transfer. K-line can transfer data bytes up to 255, whereas eight bytes are supported in the CAN frame. The address of the control unit is defined as a part of CAN identifier itself, with which it is possible to support functional and physical addressing. There are two types of addressing methods: normal and external addressing. The former is carried out using a 11-bit Identifier. The extended addressing is carried out with 29-bit identifier. The CAN messages are segmented into various CAN frames before transmission and the recipient decomposes the data transfer.
The unsegmented message of up to 7 bytes long information is transferred in Normal Addressing. The first byte of the message is PCI (Protocol Control Information), Fig. 22.6. The higher nipple of the PCI is the format and lower provides the data length. If the message is segmented, the data transfer of more than seven data bytes of information happens in normal addressing mode. The client (either diagnostic or other control) first transfers the first frame of the data byte in the CAN bus. Then the electronic unit (Server) acknowledges the receipt of the flow control frame and then subsequently, proceeds with the other frames in the data transfer for additional data bytes, Fig. 22.7.

Format of unsegmented messages (Bosch 2014)

Message transfer in segmented approach (Bosch 2014)
The first two blocks are details of PCI and data length (DL), Fig. 22.8a. In PCI, the higher nipples have the information of first frame and the next frame provides the extended data length (XDL). Both PCI and DL provide a data word which can be expressed from 0 to 4095.

Format of segmented messages (Bosch 2014) a top b middle c bottom
In segmented messages, the source shares the first frame and acknowledges the receipt by the receiver in the form of flow-control frame. Again, this contains the PCI and it is segmented through flow control frame at higher nipple and flow status (FS) in the lower nipple, Fig. 22.8b. The FS is authorised to send or delay the consecutive frames. The next frame is block size (BS): it is used for deciding the number of consecutive frames to be sent without the information of flow-control frame; further to this, there is a STmin (separation time) specifies the period between consecutive frames. The flow-control frame is followed by the consecutive frames. Again in the consecutive frame, Fig. 22.8c, the PCI is positioned high nibble, whereas, the low nibble contains the sequence number (SN). After every consecutive frame, SN is incremented by one. After reaching the value of 15, SN restarts from 0. By identifying the SN value, the receiver understands whether all the frames are sent from the source address.
As indicated in the CAN communication, a diagnostic tool is a client (ISO 15031 protocol or UDS protocol using ISO 14229 standard and BSVI, OBD information should be provided as per ISO 27415 standard). The various inputs of the diagnostic tool communicated over CAN message are:
-
1.
Live data monitoring of all the engine and vehicle parameters.
-
2.
Fault codes along with freeze frame condition, as required by emission guidelines.
-
3.
Fault codes along with environmental conditions as required by the customer for fault monitoring to detect the occurrences.
-
4.
Adjustment parameters (e.g., speed, torque injection quantity etc.,).
-
5.
Vehicle and engine information along with calibration ID for tracking.
-
6.
Testing of the sensor and actuators.
4 Engine Management System for Diesel
The inputs and outputs of engine management system (EMS) are shown in Fig. 22.9, schematically.

Engine management system for diesel BS-6
EMS Inputs
-
Inductive crank speed sensor: low current type digital input to ECU
-
Analogue type:
-
Negative temperature coefficient (NTC) water temperature sensor
-
Boost pressure cum temperature sensor: piezoresistive pressure sensor combined with NTC temperature sensor; this is an active sensor for pressure and it requires a supply voltage of 5 V
-
Atmospheric pressure sensor: piezoelectric pressure sensor; usually as a part of ECU
-
Oil pressure cum temperature sensor: similar to boost pressure cum temperature sensor
-
Rail pressure sensor: piezoresistive type
-
Hall-effect accelerator pedal module: It has two sensors one for main Pedal sensing information and another one for redundant purpose
-
-
Digital type:
-
Hall-effect cam speed/position sensor: low current type; active sensor with a supply of 5 V
-
Brake switch (main and redundant switch): dual contact
-
Clutch switch
-
Gear neutral switch
-
PTO Switch
-
Cruise control switch
-
Multistate switch
-
Ignition key switch: for powering the controller module
-
Starter switch
-
Hall-effect type vehicle speed sensor
-
AC switch input
-
Engine brake switch
-
Diagnostic request switch
-
Parking brake switch
-
Variable speed limitation switch/speed set limiting switch
-
Inductive type electron magnetic fan speed sensor
-
-
Analogue type or digital type:
-
Water-in-fuel sensor
-
-
Battery voltage: supply voltage (12 V/24 V)
-
CAN Signal and CAN on KWP protocol: CCP Protocol.
EMS Outputs
-
H-Bride output:
-
Intake throttle actuator
-
EGR DC motor control
-
Exhaust throttle actuator
-
-
PWM signal output:
-
Metering unit
-
Electromagnetic and viscotronic fan relay
-
-
Injector: pick and hold type configuration
-
Low side controls:
5 Engine Management System for Compressed Natural Gas Engines
EMS Inputs
In addition to the input and Output Configuration defined for diesel engines (Fig. 22.9), the following sensors and actuators are additionally applicable for CNG Engines, Fig. 22.10.

Engine management system for multi-point fuel injection—Compressed Natural Gas (CNG) engines for BS VI application
-
1.
Lambda sensors (Engine-out)
-
2.
3-way catalyst-out Lambda sensor
-
3.
Knock sensor
-
4.
Boost pressure and temperature sensors
-
Before intake throttle actuator
-
After intake throttle actuator
-
-
5.
CNG tank pressure sensor.
EMS Outputs
The actuators in addition to the tell-tale indicator lamps defined in the cluster for diesel:
-
1.
Spark plugs
-
2.
Gas injectors
-
3.
Intake throttle valve
-
4.
Tank pressure fuel shut off valve.
6 Details of Sensors and Actuators
Crank Speed Sensor
The sensor is mounted on the flywheel housing, Fig. 22.11. On the flywheel, a pulse wheel of cast iron or ferromagnetic type is mounted, which has accurately made teeth at precisely uniform intervals. The sensor consists of magnetic core (pole-pin, 4) surrounded by a coil, 5. A permanent magnet (1) in the sensor propagates magnetic flux through the core, and the tooth or gap of the wheel.

Inductive engine speed design (Reif 2014). (1) Permanent magnet, (2) sensor housing, (3) crank case, (4) pole pin, (5) winding, (6) air gap, (7) pulse wheel with reference mark
When the tooth is aligned to the sensor, the concentration of magnetic flux increases over the coil. When it is aligned with the wheel gap, the flux is weakened. As the flywheel rotates, the changes in flux produces a sinusoidal voltage in the coil, Fig. 22.12; the frequency and the amplitude of the signal is proportional to the speed. The controllers have protection for the voltages above 200 V (peak to peak). In many applications, the system is designed for 60 minus 2 teeth and the missing teeth are used for reference mark for synchronisation with the camshaft sensor. The controller processes the sinusoidal signal into square waveform. This is used for evaluation of the engine speed signal.

Signal generated from inductive type sensor (Reif 2014). (1) Tooth, (2) tooth space, (3) reference mark
Camshaft Sensor
The camshaft sensor is of Hall effect type, Fig. 22.13. The Hall element (6) is positioned between the trigger wheel and a permanent magnet (5) as a part of sensor package. The permanent magnet generates the magnetic flux perpendicular to the trigger wheel through Hall IC inside the sensor. This trigger (Z) wheel is positioned on the camshaft; the shaft rotates at half the crankshaft speed. This wheel is configured with a single tooth or n + 1 teeth, where, n is number of cylinders. As engine runs, teeth on the wheel (Z) cut the magnetic flux which producing the Hall voltage in the circuit. An electronic circuit, a part of the sensor package amplifies the voltage and produces a square wave (Fig. 22.14) for measurement of the camshaft speed. In general, this type of sensor is more precise than an inductive type sensor explained before.

Cam sensor (position sensor) and signal-track pulse wheel (Reif 2014). (1) Electrical connection plug, (2) sensor housing, (3) crank case, (4) sealing ring, (5) permanent magnet, (6) hall IC/hall element, (7) pulse wheel with tooth/segment (Z) and space (L)

Output signal UA (Reif 2014). α—Air gap, φ—angle of rotation
Temperature Sensors
Temperature sensors are used to measure intake manifold air temperature, coolant temperature, engine oil temperature and fuel temperature. These sensors are identical in their working principle.
Coolant Temperature Sensor
The sensor is screwed (4) in place in the coolant circuit (6), Fig. 22.15. It consists of a thermistor element (5) inside the metallic housing. The electrical lines (1) from the element is used for measurement of the resistance as a function of the temperature. The terminals of the electrical lines are crimped on the housing (2). The resistance of the thermistor drops with the rise in temperature as shown in the calibration graph, Fig. 22.16; the negative slope of the is characterised by the negative temperature coefficient (NTC). The signal is converted to the physical parameter namely, the temperature using the graph and used for various control functions in the controller algorithm.

Coolant temperature sensor (Reif 2014). (1) Electrical connection, (2) housing, (3) sealing ring, (4) thread, (5) thermistor element, (6) coolant

NTC temperature sensor characteristic curve (Reif 2014)
Intake Manifold Air Temperature Sensor
The intake temperature sensor is in combination with the intake manifold pressure sensor as a cost-effective package. It is mounted on the intake manifold immersed in the airstream. The signal from the sensor is used for correction functions in the control algorithm.
Boost Pressure Cum Temperature Sensor
The pressure sensor (Fig. 22.17, item 2) consists of a semiconductor chip in which a thin membrane is micro-mechanically engraved. This membrane is diffused with four strain gauges (R1, R2, R3, R4), forming a Wheatstone bridge. When a mechanically strained by the applying pressure, the piezo resistance of the strain gauges changes (Fig. 22.18), resulting in change in the voltage of the bridge. The other side of the membrane is vacuum. Thus, the deflection of the membrane is proportional to the absolute pressure and hence the output of the bridge.

Boost pressure sensor internal structure (Reif 2014). (1) Membrane or diaphragm, (2) silicon chip, (3) reference vacuum, (4) glass (pyrex)

Strain gauge resistor network (Reif 2014). p—measured pressure, U0—supply voltage, Um—measurement voltage, R1—strain gauge resistor (compressed), R2—strain gauge resistor (elongated)
The temperature sensor is of NTC type, as explained earlier, is a part of the sensor package.
Rail Pressure Sensor
The rail pressure sensor is a high-pressure sensor, and it can measure up to 2500 bar. It consists of a steel membrane (3) on which strain gauge resistors are engraved forming a bridge (2), Fig. 22.19. The measurement range of the sensor depends on the thickness of the steel membrane used. The deflection of the steel membrane is directly proportional to the pressure applied by fuel, causing a change in strain gauge resistance and hence a change in the bridge output. The sensed voltage is correlated is correlated with fuel pressure using a map.

High pressure sensor (Reif 2014). (1) Electrical connection (plug), (2) evaluation circuit, (3) steel membrane (diaphragm) with strain gauge resistors, (4) pressure connection
Accelerator Pedal Sensor Module
The throttle position is provided to ECU through the pedal sensor module. This input is so important for normal functioning of the engine and vehicle performance, that a redundancy is built in; there are two sensors—main and redundant. The main operates from 0 to 5 V, whereas, the redundant sensor operates with half the voltage of the main sensor, i.e., from 0 to 2.5 V. This redundant sensor is used in case the primary sensor fails with an error display.
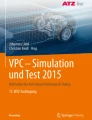
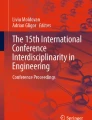
The accelerator pedal sensor using potentiometers suffer from wear and tear and consequently, drastic changes in the sensor operation. Hall effect sensors (Fig. 22.20, item (1) are free from wear. The output is a function of the magnetic field (2) through the sensor. The pedal position is recorded by a unit placed on the single plane, radially in four locations (4 and 5). Since the sensor (3) is placed between two magnets the output is not sensitive to mechanical tolerances or the temperature; the linear characteristic shown in Fig. 22.21.

Hall effect based accelerator pedal sensor (Reif 2014). Signals: (1) Integrated circuit (IC) with Hall elements, (2) Magnets (opposing magnet not shown in Figure), (3) Conductive element, (4) Hall elements for recording x-components of B, (5) Hall elements for recording y-components of B, Bx: Four sided equivalent magnetic field with x-components

Characteristic curve of the accelerator pedal sensor (Reif 2014). a Design, b principle, c measurement
Solenoid in the Injector
There are various types of injectors are available based on the following arrangements:
-
The hole-type nozzle
-
The hydraulic type
-
The solenoid.
Diesel flows from the rail to the injectors through high pressure connection, 13 (Fig. 22.22) via an inlet restriction passage (14) in the injector to the control chamber (6) and then to the fuel return line (1) through the outlet restrictor (12) when the solenoid valve is energised.

Solenoid-valve injectors (functional schematic) (Reif 2014). a Resting position, b injector opens, c injector closes, (1) fuel return, (2) solenoid coil, (3) over stroke spring, (4) solenoid armature, (5) valve ball, (6) control chamber, (7) nozzle spring, (8) pressure shoulder of nozzle needle, (9) chamber volume, (10) injection orifice, (11) solenoid-valve spring, (12) outlet restrictor, (13) high pressure connection, (14) inlet restrictor, (15) valve plunger (control plunger), (16) needle nozzle
The injector is in four states of operation:
-
Injector closed
-
Start point of Injector opening
-
End of Injector opening.
The injector works by the difference in the pressures of fuel in the two control chambers.
Injector Closed
In closed condition, the injector is not energised (Fig. 22.22) by the electronic control unit (ECU). The fuel pressure in the control chamber (9) is equal to the rail pressure and the ball valve (5) is seated on the outlet restrictor (12) due to the spring force acting on it and consequently there is no return flow of fuel to the tank; this increases the fuel pressure in the injector chamber, acting on the control plunger (15) and on the shoulders (8); the net force on the injector needle is the spring force (7) and the injector is in closed position (9).
Start Point of Injector Opening
When the solenoid is energised by the ECU, the pull current (Fig. 22.23a) rapidly switches it from its rest to open position against the spring force; it is retained in this position by a smaller hold current (Fig. 22.23d). As magnetic force increases which overcomes the spring forces from its rest position. Now, the ball valve opens the outlet restrictor and allows the fuel to flow to the fuel tank; the pressure in the control chamber reduces due to flow induced pressure drop across the restrictor; the needle opens by virtue of the pressure difference between inlet and outlet of the restrictor. The duration of the injection is that of the hold current, controlled by the ECU according to the program of timing relative to the TDC position, obtained using the crankshaft and camshaft signals.

Triggering sequence of high-pressure solenoid valve for single injection event (Reif 2014). a Opening phase, b pull-current phase, c shift from pull current to holding current phase, d holding-current phase, e switch-off
End of Injector Opening
When the solenoid is de-energised by the ECU (23, e), the ball valve closes the outlet restrictor, the pressures in the chambers equalise (as there is no flow, there is no pressure drop across the inlet restrictor) and the spring force on the needle overwhelms; the needle returns to its seat. This brings the fuel injection to an end.
7 After Treatment Control Unit
It controls the after-treatment devices which treat the engine-out emissions chemically to meet the high standards like EURO-VI/BS-VI/EPA 2017. Figure 22.24 provides the schematic diagram of the typical After Treatment System.

Block diagram of the after-treatment architecture
The architecture, Fig. 22.24, consists of a diesel oxidation catalyst (DOC), a diesel particulate filter (DPF), a selective catalytic reduction catalyst (SCR) with a urea dosing unit on the hydrolysis pipe upstream. The engine-out emissions enter the DOC where HC and CO are oxidised substantially; also, about 50% of NO is oxidised to NO2 for helping in faster reduction of NOx by NH3 to N2 in the SCR as well as passive oxidation of soot trapped in the DPF, at low temperatures. While this conversion happens, some NH3 slips through the SCR catalyst in tail pipe. Finally, this is treated in the ammonia oxidation (AMOX) catalyst for controlling the ammonia slip. These devices are controlled either through a single ECU or by having a separate control module. In case of the latter, there is a need for exchange of CAN messages of the operating parameters between the engine ECU and the separate controllers vice versa for understanding the following
-
1.
Engine speed
-
2.
Exhaust mass flow
-
3.
SOF calculation
-
4.
Ash calculation
-
5.
Detection of NO:NO2 ratio and NOx in the engine-out gases
-
6.
Ammonia storage on the SCR Catalyst
-
7.
Exhaust gas temperature data upstream and downstream of all catalyst etc.
The strategies designed for after-treating emissions are dependent on NOx emissions at the engine-out:
-
Low NOx for low urea consumption
-
Medium NOx compromising fuel economy and urea consumption
-
High NOx for fuel economy.
SCR catalysts vanadium, copper zeolite or Fe zeolite in the order of increasing NOx in the engine-out gases.
Engine ECU takes input from NOx sensor (not shown in Fig. 22.24) at the engine-out as well as oxygen sensor for identifying the rich or lean control for fuel quantity. The temperature sensors installed before and after DOC calculate NOx conversion in the DOC. The temperature and delta-pressure sensor installed on the DPF help to determine the soot oxidation at DPF as well as DPF loading. Thermal management of DPF is necessary to oxidise the soot load passively. For active regeneration, a HC dozer is commanded.
8 On Board Diagnostic (OBD) with IUPR (AIS 137, part 4)
On board diagnostic (OBD) function in the ECU is used for monitoring the emission related components and the system for the intended functionality of monitoring performance and emission within threshold limits:
-
Major monitoring (MM),
-
Comprehensive component monitoring (CCM), and
-
Total functional failure monitoring (TFF).
The OBD monitors and indicates to the driver, the parameters which contribute to increase in emission levels above OBD threshold limits. In case of malfunction of components, but leading to emissions within the OBD threshold limits, then it is indicated to the driver through the malfunction indication lamp (MIL). If this fault condition for the function continues or aggravates to increase emissions above OBD threshold limits, the ECU triggers inducement for torque reduction (NOX related components including EGR, tampering). Apart from OBD diagnostics, there is a diagnostic specific to the system and safety for all electronic components connected with ECU, for monitoring the performance and failure of the components. Based on the types of faults, the inducement strategy is decided for indication to the driver for fault rectification by attending in a service station or with a trained technician and to protect the system from malfunction by running with the degraded condition. The mechanism of fault diagnostics is elaborated with general view point on diagnostic.
Processing Fault Diagnosis
The diagnostic system monitors the functions and the connected components of the engine control. The diagnostic system, therefore, monitors for electrical errors. Furthermore, rationality and drift checks are executed. If an error is detected by the diagnostic system, the faulty component is set as “preliminary” defect. The fault is set as “final” defect, if the error lasts longer than a defined pre-debouncing time (Every component has a separate debouncing time). During the debouncing time, if the error disappears, then the fault is reset and the values from the sensors are monitored as they are, and the faults set if the fault reappear (Fig. 22.25). The healing detection is also similar to the error detection (Fig. 22.26).

Fault debouncing for detection

Fault debouncing for healing
As explained in the previous section, after concluding about finality of the defects are final, then the error reaction strategy is activated for fault rectification. This is necessary to provide a secure operation of the vehicle and to protect the engine and its components. The strategies followed in the vehicles during diagnostic failures are:
-
To provide a replacement value or substitute value till rectification of the faults
-
Deactivation of a function
-
Limitation of a value when torque or speed is limited
-
Shutting the system off.
The error reactions are provided if the component is not detected or healed. Depending on the component and the error type the error is written immediately into the fault memory or after a defined number of successive driving cycles (DC). These entries in the fault memory and specified environmental conditions can be read out with a generic scan tool. The fault is deleted from the fault memory after warm up cycle (WUC) if it is rectified in normal operation.
The number of entries in the fault memory is limited. If there is an overflow of the fault memory the entry with the lowest priority is deleted. If there are many fault entries with the same priority, the oldest is deleted. To warn the driver that there is an emission relevant error in the system, a MIL is switched on as soon as the error is stored in the fault memory. The MIL is switched off after the component is detected in three successive driving cycles as specified in emission standards. If there is more than one defective component, the MIL is switched off after the last entry is healed.
The sensors and actuators monitored for signal range check are given in Table 22.1.
9 Actuators
∙ Injectors (1…6) ∙ EGR (exhaust gas recirculation) valve ∙ Mal function indicator lamps etc. ∙ Urea dosing pump ∙ Air regulator valve | ∙ CAN-signal failure related to actuators ∙ HC dosing ∙ Exhaust/inlet flap ∙ Heating unit + coolant valve control |
Flow Chart—Sensor Signal Range Check
The sensor signal is monitored for the signal range. If the sensor signal voltage exceeds the calibrated threshold for a predetermined time, a “signal range-high” fault is set. If the sensor signal range is below a calibrated threshold for a calibrated time, a “signal range-low” fault is set, Fig. 22.27.

Flow chart for activation of sensor signal check
Sensor Signal Rationality Monitoring
The signals from different sensors and actuators are monitored for rationality. The measured sensor signal is compared with the calculated value; if a deviation of measured from calculated value is more than the calibrated threshold for a predetermined time, then the rationality fault is set, Fig. 22.28.

Flow chart for sensor signal rationality monitoring
Total Functional Failure Monitoring (TFFM)
Monitoring a malfunction detects the loss of primary function of a required system. In simple terms, total breakdown of the system or a component, or absence of required system or interchanging with bogus system is detected.
Performance Monitoring (PM)
Here, the monitor detects the failure of a component or a system to perform its function. It is not related to the emission thresholds, e.g.: reagent injection proper delivery, non-availability reagent for a DeNOx system, reagent quality etc.
Emission Threshold Monitoring (ETM)
The monitors detect the failure of a component or a system which leads to emissions beyond OBD threshold limits (OTL). This is applicable:
-
monitoring the deterioration of the efficiency with respect to the systems and corresponding emissions only of the following:
-
DeNOx system; emission of NOx only
-
the particulate filter system; emission of particulate only
-
combined DeNOx-particulate filter system; emissions of NOx and particulate
-
-
Reduction in EGR Cooler efficiency and charge air cooler system efficiency etc.
-
DOC conversion efficiency (AIS 137, part 4, ch. 8).
Inducement Strategies (AIS 137, part 4, ch. 8)
There are two-stages of inducement available:
-
low level inducement leading to performance deterioration followed by
-
severe inducement such as restriction of vehicle operation as mentioned below.
Low Level Inducement (25% Reduction in Torque, AIS 137, part 4, ch. 8)
A few examples and the conditions where this are applicable is mentioned below.
-
1.
Urea level lower than 2.5% of nominal value
-
2.
10 h of running with wrong urea quality
-
3.
10 h of wrong urea consumption or dosing interruption
-
4.
36 h of failure of EGR or NOx monitoring sensors.
Severe Inducement (Max Vehicle Speed 20 kmph, AIS 137, part 4, ch. 8)
A few conditions for activation of severe inducement strategy during OBD monitoring:
-
1.
Urea tank is empty
-
2.
20 h of running with wrong urea quality
-
3.
20 h of wrong urea consumption or dosing interruption
-
4.
100 h of failure of EGR or NOx monitoring sensors
-
5.
70 min of no dosing in non-heated SCR system at ambient less than −7 °C.
The condition for activation of OBD inducement strategy after either one of first three options and fourth option mentioned below whichever comes first.
-
1.
Active at next restart
-
2.
Active after refuelling not more that 10% of fuel tank capacity
-
3.
Active after vehicle stationary for more than one hr
-
4.
If the above is not happening, then active inducement after eight hours of engine running.
9.1 OBD Disablement Condition (AIS 137, part 4, ch. 8)
-
OBD monitoring function can be disabled in any one of the following conditions
-
Temporary disablement of the driver warning system can be carried out due to interruption from other warning signals providing safety related messages
-
At ambient temperature below −7 °C when the coolant temperature is minimum of at least 60 °C
-
At ambient temperature below −7 °C with cold reagent
-
At ambient temperature above 35 or 55 °C according to the national standards
-
At altitude above 2500 m above sea level
-
-
operating conditions for NOx Control Monitoring System:
-
At ambient temperature between −7 and 55 °C
-
At ambient below 1600 m
-
At engine coolant temperatures above 70 °C.
-
OBD II NOx and Particulate Matter (AIS 137, part 4, ch. 8)
The OBD emission threshold for NOx and PM are mentioned in the table below.
Bharat stage | SCR OBD requirements | OBD limits (mg/kWh) | NOx control requirements | NOx control limits |
|---|---|---|---|---|
VI-1 | Reagent delivery Reagent availability Proper consumption Regent quality SCR conversion efficiency Electrical component monitoring failures | NOx > 1500 | Activation of driver warning system/inducement system in case of Poor reagent quality Reagent consumption Tampering Low reagent level | Reagent quality limit: NOx > 900 mg/kWh Reagent consumption deviation ±50% |
VI-2 | Reagent delivery Reagent availability Proper consumption Regent quality SCR conversion efficiency Electrical component monitoring failures | NOx > 1200 | Activation of driver warning system/inducement system in case of Poor reagent quality Reagent consumption Tampering Low reagent level | Reagent quality limit: NOx > 460 mg/kWh Reagent consumption deviation ±50% |
Bharat stage | PM monitoring—OBD threshold limits (mg/kWh) | DPF monitoring |
|---|---|---|
VI-I | 25 | Performance monitoring Delta Pressure > = 60% between deteriorated and a new DPF |
VI-II | 25 | Emission threshold limit (25 mg/kWh) |
In Use Performance Ratio (IUPR) (AIS 137, part 4, ch. 8)
The In-use performance Ratio (IUPR) for specific monitor is calculated as mentioned below
where ‘Numerator’ is incremented as a counter value whenever the number of times the specific monitoring conditions are satisfied in the vehicle running condition. ‘Denominator’ is incremented as a counter value whenever specific monitor related vehicle operating condition which is satisfied (refer example below).
Group Monitor
The In-Use performance ratio (IUPRg) for a group monitors are calculated based on the average value of various specific monitors
where ‘Numeratorg’ is an incremented counter value which has lowest in use performance of the specific monitoring in the group of monitors.
‘Denominatorg’ is also an incremented counter value of the specific monitor which has lowest in use performance ratio within the group of monitors.
The vehicle operating condition where this monitoring conditions are satisfied for denominator, are:
-
Denominator is incremented within 10 s, if defined criteria is fulfilled. i.e.
-
600 s since engine start
-
55 °C < Ambient < −7 °C
-
Elevation <= 2500 m
-
Engine Speed >=1150 rpm for minimum 300 s
-
Accelerator Pedal not pressed and vehicle Speed < 1.6 kmph/Engine Speed is less than idling + 200 rpm.
10 ECU Development Process, V-Cycle
The world has migrated from the traditional legacy-based hand-written C code to model based approach for agile process development in embedded domain. The project management is handled through the various software tools for e.g. SVN/IDoor/PTC Integrity. This approach enables the original equipment manufacturers (OEM) to reduce the development time, cost and improve the quality of the software code. The typical V cycle development process is shown in Fig. 22.29 and the details are explained below.

ECU V cycle process for embedded development (Jaikamal and Zurawka 2010)
System Requirement: This covers the details of the complete interface of the components involved in the entire system. It provides a skeletal view for the complete system along with the target application. The components of the system are elaborated below.
Functional Requirement: This provides the information about the function with details of input and output where the model-based approach or tables, curves and empirical calculations are defined. This also gives the brief objective of the function in the software development.
Detailed Requirement Engineering (Software Development Phase): Algorithms and software functions using MATLAB and Simulink are developed along with software interfaces. The base layer for code generation uses Simulink coder or target link coder to C-code, specific to the rapid prototyping.
Unit Testing and Hardware-In-Loop Testing (Software Validation Phase)
Software-In-Loop (SIL) is an alternative method for validation of the embedded software in day-to-day development. This requires a power computing PC for running the plant model with C-code, generated through auto-coding for verification and iteration of the functions before carrying out the validation in the real application. The legacy codes are more commonly tested the with the plant model before validation in the vehicle environment. This approach does not require the physical hardware and can reduce the time and costs of the new software development considerably. Also, the reuse is very attractive and improves the quality and reliability of the codes before release to vehicle environment. The software can be easily extrapolated for various other functions. SIL is carried out separately by means of unit testing and debugging for verification of the C-code.
Hardware-In-Loop (HIL) is the process of validating the ECU software along with the ECU and vehicle. The software is validated for intended function along with HIL system. HIL system does not require an engine and vehicle for testing it with similar application. This powerful method validates the software repeatedly, automatically and over a wide range of operating conditions without carrying the risks of the vehicle environment.
Verification on Engine Test Bed
Finally, the software validation is carried out in the real environment such as an engine test bench, after verification and validation on the unit testing and hardware-in-loop environment for checking the engine performance and emission at the engine dynamometer.
Validation on Vehicle for Series Production
Afterwards, this software is migrated for higher level of validation in terms of system verification and reliability, in roadworthy testing conditions, before moving to series production of a larger volume of vehicles.
10.1 Advantages of Rapid Prototyping
To gain confidence in the development strategy, use of rapid prototyping is explored through the pilot project approach. The main advantage for this activity was set by an initial effort to define the tool chain for the development which accelerates the development of control algorithms for engine initially, and vehicle subsequently. This is a very vital approach followed to verify the software and achieve the performance of engine or vehicle before moving towards testing the intended product.
Previously, the hand-written code was used in control development, which requires high development time and intense verification and validation process. With the model-based rapid prototype approaches, the engineers are able to understand the implication of the control function on systems before moving to the real-time environment. The auto-code generated software is loaded in the ECU for checking the performance of the vehicles, Fig. 22.30. There are various tool chains available for this purpose: TargetLink or MATLAB based auto code generation approach for the rapid prototype hardware from DSpace, ETAS, Woodward, NI LabVIEW, PI-Innovo etc.

Rapid prototype tool chain for ECU software auto coding
11 Production Code Generation
The production code generation is the next step in rapid prototype development. This is associated with efficient code generation and burns the controller directly for series production hardware. This requires changes in the base software layer along with low level driver interfaces. The driver development depends on the controller and all the tool chains for the development, considering the hardware. Moreover, the base-layer software developed in hand-written C-code requires the wrapper for interfacing with the application software which is developed by model-based approach. The process of the software development is similar to the approach followed in the rapid prototyping method, except for the specific association with the hardware processor.
To avoid this wrapper, the interfacing is defined as blocks in the Simulink graphical development environment for all the base software requirement. Thus, the complete software can be developed using the model-based approaches.
12 Closed Loop PID Control Mechanism
Conventional mechanical governors are found to be very inefficient in precisely controlling the speed. Further, a turbocharged engine has several components and it increases the complexity for working with conventional mechanical governing. The conventional governor property changes over time due to wear and tear of the components. Due to this, it may not be able to provide optimum control in various operating conditions such as ambient temperature and pressure and so on. Therefore, the electronic governor is now widely used with the PID controller concept. The PID control is a closed loop control mechanism which has many advantages in terms of meeting the response with high precision. This provides additional features like automatic tuning, gain scheduling, and continuous adaptation.
The closed loop controller (PID) developed is in series with plant model for altering the plant response meeting the requirements. In Fig. 22.31, y is the measured process variable, r is the reference variable, u is the control signal. The control effort, \( e\left( t \right) = y\left( t \right) - r\left( t \right) \) is derived from the feedback, y(t) as well as the required speed control such as reference variable r(t) before tuning the following PID parameters for attaining the stable plant response:

Closed loop feedback
- \( K_{p} = K \) :
-
Proportional control gain
- \( K_{i} = K/T_{i} \) :
-
Integral control gain
- \( K_{d} = K/T_{d} \) :
-
Differential control gain.
The integral, proportional and derivative parts can be estimated as control actions based on the past, the present and the future using first order step response output in the Simulink. The equation of the controller in discrete domain for tuning the gain constant to attain the required response is
Also, the equation is expressed in the time domain as shown below
The simple model is sufficiently reliable to provide satisfactory PID gains. The closed loop algorithm and tuning of the gain constant for stable response is achieved in different vehicle platforms. This methodology automates the calibration constant of idle speed controllers while satisfying requirements on stability, performance, and robustness of the closed-loop system.
Tuning method for speed response is started with gain, Kp to attain the set speed with this proportional variation. After attaining the values of the required speed with proportional gain as well as stability of the response, Ki is tuned for attaining the set speed within the required tolerance for speed, within the desired time period, at steady state. Any change in response from a high-speed to the low speed or intermittent speed can cause undershoot and engine may shut off. For transient control, Kd is tuned to have smooth behaviour from one steady state to set speed point.
References
AIS137 (part 4, ch. 8), Test method, Testing equipment and Related Procedures for Type Approval and Conformity of Production (COP), Testing of M and N category vehicles having GVW exceeding 3500 kg for Bharat Stage VI (BSVI) Emission Norms as per CMV Rules 115, 116 and 126
Bosch R (2014) Bosch automotive electrics and automotive electronics: systems and components, networking and hybrid drive
Gerhardt J, Hönninger H, Bischof H (1998) A new approach to functional and software structure for engine management systems-BOSCH ME7. No. 980801. SAE Technical Paper
Jaikamal V, Zurawka T (2010) Advanced techniques for simulating ECU C-code on the PC. No. 2010-01-0431. SAE Technical Paper
Reif K (ed) (2014) Diesel engine management. Springer Vieweg, Wiesbaden. (Reference Book)
Thate JM, Kendrick LE, Nadarajah S (2004) Caterpillar automatic code generation. No. 2004-01-0894. SAE Technical Paper
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Leelakumar, M. (2020). Design of Electronic Control for Diesel Engines. In: Lakshminarayanan, P., Agarwal, A. (eds) Design and Development of Heavy Duty Diesel Engines. Energy, Environment, and Sustainability. Springer, Singapore. https://doi.org/10.1007/978-981-15-0970-4_22
Download citation
DOI: https://doi.org/10.1007/978-981-15-0970-4_22
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-0969-8
Online ISBN: 978-981-15-0970-4
eBook Packages: EngineeringEngineering (R0)