
Abstract
A first-order potential flow panel method is used in the present work to calculate aerodynamic yaw torques and other parameters involved in the turning performance of a stratospheric lighter-than-air airship. A specific mesh is generated to model the airship geometry in order to solve the Laplace potential flow equation by a sum of source and doubled distributions on the boundary, using a mix of Neumann and Dirichlet boundary conditions. As a result, it is possible to simulate the effect of the rudder and elevons within their angular range at different flight conditions. Air flow rotation is included in the boundary conditions to simulate airship yaw rate. Thus, the result of the model includes not only yaw momentum but also its derivative with respect to yaw rate and the lateral force. They are contrasted with a series of tests carried out in a wind tunnel for a stratospheric airship model and with the literature. Despite of the simplicity of the potential method (5 s execution for a 6000-cell mesh) compared to a more complex CFD simulations, the conclusions demonstrate that the correlation between numerical and experimental data is high enough to provide valuable performance insights during the design process, showing a considerable reduction of the necessary computational resources. A 30 m ECOSAT model with proper fins can turn with a steady radius of 50 to 60 m.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Automatic control of airships requires specific tracking techniques [1] where aerodynamic forces—lift and lateral forces—and pitch and yaw momenta are driving elements. The inherently instable pitch and yaw moment around the center of thick bodies such as airships may lead to control difficulties [2,3,4].
Numerical methods provide a useful approach to preliminary estimate aerodynamic performance. The finite volume techniques solve the Navier–Stokes equations in a quite reliable manner but requiring a high computer throughput. But for the particular problem of turn stabilization and control, where inviscid-flow forces are dominant, potential flow can be considered; this dramatically reduces the processing load enabling many optimization mechanisms at design phases of new airships. The proposed approach is very useful, as the optimization process usually requires analyzing a large set of parameters combination to identify the optimal location, span, and chord of the airship fins [5].
The solution for inviscid potential flow around thin airfoils can be successfully addressed analytically by perturbation models, and then extended numerically to thick objects, even in 3D, by the so-called panel method [6].
Present work exploits these features to estimate the turn performances of a stratospheric lighter-than-air model called ECOSAT, which currently flies vehicles from 2 to 30 m length as engineering models. In particular, the ECOSAT AS30 model is an autonomous electrical airship able to reach 3000 m with an endurance of 1 h. In order to de-risk stratospheric technologies, the model is equipped with all the elements necessary to stand stratospheric environment.
2 Problem Definition and Formulation
The formulation can be split into two main parts: geometry and aerodynamic model. Most of the details of the formulation are described in detail in [7], where a mesh generation mechanism was developed to model a large airship with its characteristic lengths of hull and fins.
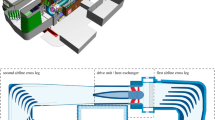
From the geometric point of view and for the purpose of this work, a parametric definition of fins (shape and location) and control surfaces has been specifically developed, using a generic quadrilateral panel. The wake is derived from the position of these control surfaces using quadrilateral panels as well (Fig. 1). The panels of thin surfaces keep independent properties at both sides. Thick panels maintain an interior potential that is a-priori selected so that the external value provides the mean of calculating the local velocity. Additionally, the circulation in trailing edges is shed along a wake, which is modeled by thin flat panel strip.

Detail of the geometry of fins, control surfaces, and wake panels
From the aerodynamics point of view, the potential flow is considered by solving the Laplace equation by a sum of source and doubled distributions on the boundary, including the hull, the fins, the control surfaces, and the wake. Neumann boundary condition is applied to thin panels and Dirichlet boundary condition to those that are thick (assuming the internal body potential is known). In the end, the influence matrix is generated and solved iteratively.
3 Methodology
The novelty over the work developed in [7] is the modeling of the control surfaces and the turn rate. The rudders and elevons are installed in the four fins and defined parametrically so that geometry can be generated effortless to analyze the effect of these parameters: location, span, and chord of the airship fins.
The unperturbed stream now generates different velocities in each panel that need to be considered in the boundary condition equations that form the influence matrix.
One of the most difficult issues is to derive the panel velocity from the values of the doublets and sources associated to them. This is developed as a post processing interpolation among all the neighbors enabling the calculation of the potential derivatives, and hence, the sought induced velocity. Besides, the wake can be modified to follow local streamlines and the procedure is executed several times given the short processing time (only tenths of seconds for a 1e4 cell mesh in conventional computers).
Furthermore, the method enables the estimation of the moment derivatives with respect to the yaw/pitch rates. As it is well known, they play a fundamental role in the lateral-directional and longitudinal stability as well as turn rate performances.
4 Results
The aerodynamic prediction capabilities of the method we have developed are well illustrated by the graphs in Fig. 3. It shows the comparison between the yaw moments with respect to the vehicle center from several angles of sideslip. The test where performed in a wind tunnel using a model that included the bare hull and the fins. No rudders were included at the moment, so for the validation process only the rudder 0-deg position would be considered. Although the size of the real ECOSAT model is undisclosed, the experiment is prepared to replicate performance at length-based Reynolds about 106, as expected in stratospheric HAPS (Fig. 2).

Experimental an numeric pitch moment coefficients for different configurations

Comparison of pitch and yaw moment coefficients for different rudder positions
An advantage of considering the resulting moments instead of the forces is that they are less dependent on the minor deviations of the pressure curves in certain areas; consequently, the matching between the experiments and the model prediction is very good. Only at intermediate angles of sideslip the potential method slightly underestimates the moment.
Furthermore, the predicted yaw coefficient is also depicted for a rudder that is totally deflected at ±25 deg, as per
where \(N\) is the yaw moment, \(\rho\) is the reference air density, \(V_{\infty }\) is the unperturbed airspeed, and \({\text{Vol}}\) is the reference hull volume. In a similar way, the pitch moment coefficient is
As expected, the yaw coefficient curve is displaced to higher or lower values depending on the rudder angle (positive or negative). Worth noting, at high angles of sideslip, the capability of the rudders to modify the yaw coefficient is not equal for positive and negative deflection angles.
The yaw moment derivative respect to the yaw rate is estimated using rotations around the center of volume to calculate the unperturbed velocity and hence to update the boundary conditions with respect to the static case. Airship turn performance is the result of combing this value with the lateral force, already implemented, and the moment induced by the yaw rate.
The definitions used in this paper to have dimensionless magnitudes are
where \(r\) is the yaw rate and \(\hat{r}\) its correspondent dimensionless form.
The values shown in Fig. 4 are considered reasonable when compared with available references (e.g., −0.073 for HALE bare hull [8]). Unfortunately, this value cannot be checked up to date against an experimental test.

Estimation of the yaw moment derivative respect to the yaw rate
In order to estimate the steady rotation radius, the lateral force coefficient (\({c}_{y}\)) is deduced from the lateral force (\(Y\)). This force is less prone to be modeled with a panel method as it disregards viscosity contributions and boundary layer detachments. Figure 5 shows the underestimation of the force when compared to a 5.1 × 106 Reynolds wind tunnel test. The larger the sideslip angle the worse the results.

Estimation of the lateral force respect to the sideslip angle
Finally, the radius of steady turn is extracted from numerical simulations with the above information, obtaining the results in Fig. 6. Results need to be tested in scale models but the objective of having a semi-automatic tool for the estimation of turn radius has been successfully achieved. The simulated model is quite agile as the radius is about two times the length.

Steady turn radius estimation
5 Discussion and Conclusions
Although the design process of any airship requires highly powerful and accurate simulations and experiments, those are quite resource consuming and cannot be massively used to explore the whole design space. That is why the idea of employing simplified—but accurate enough—methods is highly interesting during the preliminary design, when a wide variety of concepts need to be considered.
The potential method presented in this paper is capable of saving a huge amount of computational time when compared with traditional CFD, as every design configuration can be studied in a matter of a few minutes. Despite of its simplicity, it has proven to be accurate enough to provide valuable performance insights during the design process, including those related to turning performance.
Thus, yaw moment coefficients for different rudder positions can be easily calculated, as well as the yaw moment derivative respect to the yaw rate and the lateral force respect to the sideslip angle. All those data are used then to calculate the turning performance.
Preliminary results show good matching between the quick results obtained with this method and the turning performances measured by ECOSAT models in the wind tunnel. This enables a future optimization process for the final stratospheric model to have the most efficient tail definition.
References
Yuan J et al (2020) Trajectory tracking control for a stratospheric airship subject to constraints and unknown disturbances. IEEE Access 8:31453–31470
Khoury GA (2012) Airship technology. Cambridge University Press
Ashraf MZ, Choudhry MA (2013) Dynamic modeling of the airship with matlab using geometrical aerodynamic parameters. Aerosp Sci Technol 25:56–64
Carishner GE, Nicolai LM (2013) Fundamentals of aircraft and airship design: airship design and case studies. AIAA, Reston, VA
Suvarna S et al (2021) Optimization of fins to minimize directional instability in airships. J Aircr 59(2):317–328
Ashley H, Landahl M (1965) Aerodynamics of wings and bodies. Addison-Wesley
Gonzalo J et al (2020) On the development of a parametric aerodynamic model of a stratospheric airship. Aerosp Sci Technol 107:106316
Carichner GE, Nicolai LM (2013) Fundamentals of aircraft and airship design, airship design and case studies, vol 2. AIAA education series
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Gonzalo, J., Domínguez, D., López, D., Salguero, C. (2023). Airship Turn Performance Estimated From Efficient Potential Flow Panel Method. In: Shukla, D. (eds) Lighter Than Air Systems . Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-6049-9_5
Download citation
DOI: https://doi.org/10.1007/978-981-19-6049-9_5
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6048-2
Online ISBN: 978-981-19-6049-9
eBook Packages: EngineeringEngineering (R0)