
Abstract
In this contribution, we propose two novel concepts of an adaptive ultra-light high-altitude aerostats. Both proposed concepts enable changes of aerostat volume and shape during the flight, which results in the possibility of vertical motion control. The first proposed construction is telescopic aerostat with multi-segmented construction and controllable segments’ couplings. In turn, the second construction is based on a self-deployable tensegrity structure equipped with pre-stressed and tensioned elements of controllable lengths. Basic advantages and features of the proposed design are shown using dedicated numerical examples.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others
Keywords
1 Introduction
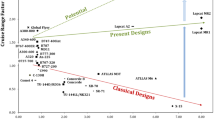
Airships and balloons were the first flying vehicles but for a long time, their usage has been very limited due to development of aviation. Specified military application included reconnaissance missions and ocean surveillance [1, 2], while the civil use was interrupted by crash of the Hindenburg in 1937. Recent technological changes have caused renaissance of airship applications. At the beginning of the century, many new-generation helium-filled airships enabling long-term and low-energy flights have been constructed and used for low-cost stratosphere and mesosphere exploration [3, 4]. Currently constructed airships provide telecommunication in rarely populated areas, serve as remote monitoring systems and research pseudo-satellites [5,6,7]. The most well-known examples of airships are Zephyr S, Russian concept Berkut, Lockheed Martin’s ISIS and French Stratobus.
The first part of this contribution proposes adaptive telescopic aerostat [8] with multi-segmented construction, which is equipped with controllable segments’ couplings, additional pressure tank with compressor and valve. The proposed system allows to modify pressure difference between the aerostat and the atmosphere, and to obtain desired volume of the aerostat at each altitude. As a result, the vertical motion of the aerostat can be controlled in arbitrarily selected manner. In particular, flight path with pre-defined altitude changes can be obtained with minimal transfer times or with minimal energy requirements for the compressor. Two corresponding control strategies aimed at maximal control efficiency and minimal control cost are presented and compared in the following part of the paper.
In the second part of this contribution, the authors propose aerostat based on deployable tensegrity structure with active elements of controllable lengths [9, 10]. Such construction enables convenient transport of the aerostat in a compact form with the use of an hot-air balloon or an aircraft and its automatic deployment at operational altitude. The tensegrity structure provides low mass of the aerostat, adequate support of the aerostat envelope and possibility of transferring point loads resulting from carried cargo. On the other hand, it enables convenient change of the aerostat volume and shape during the flight. The change of volume can be used to control the actual buoyancy force and resulting vertical motion of the aerostat (“V-mobility”). In turn, the change of aerostat shape can be used for changing the influence of lateral wind gusts or controlling horizontal stability during the mission (“H-stability”). In both above cases, the attention of conducted research is focused on strength analysis during the process of morphing.
2 The Concept of Adaptive Telescopic Aerostats
The proposed concept for vertical mobility is based on the reversible, telescopic option for the aerostat volume modifications, in which the crucial feature is system composed of structural sections connected via controllable actuators fixing or releasing their relative movement and additional helium container (pressure tank) allowing controllable release or absorption of gas [8]. The design concept of the small high-altitude pseudo-satellite (HAPS) module applied in further analyses of its mobility and load-carrying capacity is illustrated in Figs. 1 and 2. The construction consists of a cylindrical housing reinforced by axial and circumferential ribs.

Scheme of the HAPS design: aerostat in compact form

Scheme of the HAPS design: aerostat in extended form
The HAPS offers a possibility of volume modification by changing the length of the cylindrical section from initial dimension of D to the maximal dimension of 2D. It is possible due to the construction consisting of the inner (1) and outer segments (2), which are sliding along linear guideways (7). Relative motion of these guideways can be blocked by actuator (3), which creates the clamping mechanism providing control of the aerostat volume.
In order to achieve a proper mobility, the aerostat is equipped with an additional gas storage tank (4) with an additional amount of pressurized helium. This additional tank serves for the purpose of generating the pressure difference between aerostat and its environment. The created overpressure or underpresure is used to generate forces needed to fold and unfold the aerostat. In order to reduce helium losses caused by its release to atmosphere, the aerostat is equipped with a compressor (6) and a valve (5), which control the flow of helium from the aerostat back to the additional gas tank.
Application of the above described system composed of additional pressure tank, the compressor and the valve enables precise control of the gas flow and actual pressure difference between the aerostat and the atmosphere during the ascending and descending processes. This allows to control the process of folding and unfolding of the aerostat, to generate the required value of the lift force resulting from buoyancy and to obtain equilibrium position of the aerostat at desired altitude.
3 Comparison of Strategies for Control of Aerostat Motion
In the considered control problem, we will analyse the process of aerostat ascending and descending of total duration of 12,000 s. During the first part of the process, the aerostat should ascend from the ground level to initial equilibrium position located at h1 = 350 m, next it should float to the target altitude h3 = 5000 m with an intermediate stop at the altitude h2 = 3000 m. Further, in the second part of the process, the aerostat should descend from the altitude h3 = 5000 m back to altitude h5 = 350 m, with the intermediate stop at the altitude of h4 = 3000 m.
The first control problem is to find change of aerostat volume and the corresponding required change of pressure difference between the aerostat and the atmosphere, which enable realization of the above defined aerostat flight path, providing the shortest time motion between the assume altitudes. The solution involves maximally fast change of pressure difference and step-wise change of aerostat volume at the beginning of each stage of ascending and descending. The conducted simulations (Figs. 3 and 4, red lines) indicate that each stage of ascending and descending process is associated with large amount of work done by the compressor. In particular, large power consumption is required at the beginning of the descending stages, when large mass of helium has to be transferred to the storage tank to reduce the volume of the capsule and allow atmospheric pressure to fold the structure.

Change of aerostat altitude: strategy maximizing vertical mobility efficiency (red) strategy minimizing vertical mobility energetic cost (blue)

Work during gas transfer: change of aerostat altitude: strategy maximizing vertical mobility efficiency (red), strategy minimizing vertical mobility energetic cost (blue)
The second control problem is to find change of aerostat volume and the corresponding required change of pressure difference between gas pressure in the aerostat and the atmospheric pressure, which enable realization of the above defined aerostat flight path, providing minimal energy used for gas transfer between additional gas tank and aerostat. The optimal solution leads to realization of the entire process in possibly slow manner, with minimal pressure difference between gas pressure in the aerostat and gas pressure in the storage tank. In the conducted simulations (Figs. 3 and 4, blue lines), the modification of aerostat volume is conducted progressively during subsequent pre-defined time periods of ascending and descending. As a result, each stage of the process is associated with significantly smaller work done by compressor. In particular, initial parts of descending stages do not require excessive power consumption.
4 The Concept of Tensegrity-Based Aerostat
The simplest tensegrity-based aerostat utilizes “tensegrity prism” composed of three struts and nine tendons as an internal skeletal structure (Fig. 5a). Selected nodes (1a) of the tensegrity are permanently integrated with aerostat envelope, while the other nodes (1b) are connected slidably in order to avoid excessive internal forces. The applied tensegrity structure differs from the classical one since three vertical tendons (green-coloured, 1e) are highly elastic, while the horizontal stiff tendons (blue-coloured, 1c) have controllable lengths. Structural stability of the structure is ensured by the stiff struts (red-coloured, 1d).

a Single module of foldable tensegrity structure; b Single-chamber tensegrity aerostat; c Four-module tensegrity structure; d Three-chamber aerostat with four modules of tensegrity structure
The aerostat based on such a tensegrity structure has cylindrical shape with two hemispheres located at the lateral sides (Fig. 5b). Symmetric shortening of the stiff tendons of controllable lengths implies change of cylinder radius, decease of aerostat volume and causes that aerostat shape becomes more slender. In turn, asymmetric shortening of the tendons causes asymmetric deformation of the aerostat and changes its resistance to winds in axial direction.
The more complex tensegrity-based aerostat has a skeletal structure composed of four tensegrity modules. Each tensegrity unit is based on two squares rotated by 45° (Fig. 1c–d), in which the stiff tendons (1c) are arranged into crosses. The struts, highly elastic and controllable tendons are shown in Fig. 5c. The set of movable joints of each unit tensegrity structure is slidingly connected to guide rails, which are bounded to the aerostat envelope.
In this case, the aerostat has a shape of ellipsoid with a circular cross section in the vertical plane. The considered aerostat is 10 m long and 2 m wide, and it is divided into three chambers with the use of two internal diaphragms. Application of four tensegrity modules provides wide possibilities of changing aerostat shape. In the proposed solution, the shape of the arbitrary section can be significantly modified, which causes that aerostat can be precisely adjusted to wind gusts in both axial and lateral directions, leading to the process of “adaptive morphing.” Such process can be efficiently conducted using controllable retractors, such as rotary electric motors or linear actuators, serving for contraction or elongation of stiff tendons.
5 Strength Analysis of Tensegrity-Based Aerostat
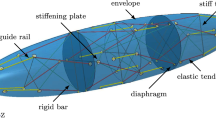
The FEM-based strength analysis conducted in ABAQUS software was aimed at finding distributions of internal forces in skeletal structure and aerostat envelope caused by pressure differences at various altitudes. The mesh of the envelope and nodes of the tensegrity structure is illustrated in Fig. 6. The envelope and diaphragms are modelled by means of 3- and 4-node membrane elements, and the stiffening plates in the locations of connection with tensegrity joints and guide rails—by shell elements, bars and guide rails—by beam elements, highly elastic tendons—by truss elements, stiff tendons, retractors and sliding connections—by special type of elements called connectors. For computations, the following material data was assumed:

Numerical model of a three-chamber aerostat with four tensegrity modules
-
envelope and diaphragms: t = 50 µm, ρ = 1390 kg/m3 and E = 0.43 GPa;
-
bars, guide rails (pipe cross-section, t = 1 mm) and stiffening plates (t = 1 mm)—carbon fibre: ρ = 1580 kg/m3 and E = 87.0 GPa;
-
highly elastic tendons (rubber-like material): ρ = 900 kg/m3 and E = 0.05 GPa;
-
stiff tendons: t = 3 mm, ρ = 7850 kg/m3 and E = 210 GPa.).
The total mass of the aerostat including payload equals to 15.2 kg. A structural strength assessment was performed for three altitudes: h1 = 5 km, h2 = 3.725 km and h3 = 2 km. Firstly, to reach the altitude of h1, helium mass of 2.537 kg was inflated into the aerostat. Then, aerostat was partially deflated by transferring 0.095 kg of helium to additional tank. Finally, all stiff tendons were uniformly shortened to decrease aerostat volume and achieve the altitude of h3 = 2 km. The changes of atmospheric pressure were based on NASA’s atmosphere model.
The equivalent von Mises stresses in the envelope computed for all considered altitudes are presented in Fig. 7. The highest level of the stresses is reached for the altitude of h1 = 5 km—about 50 MPa in the membrane and 67 MPa in the stiffening plates. Descents to the altitude h2 = 3.725 km, being the results of helium transfer, causes that equivalent von Mises stresses are decreasing. When the aerostat continues its descent due to tendons shortening, the stresses in the bar members of tensegrity structure sharply increase to 240 MPa, but they do not exceed the yield stresses limit of the applied material.

Equivalent von Misses stresses in the envelope at altitude of a h1 = 5 km, b h2 = 3.725 km and c h3 = 2 km
6 Discussion and Conclusions
The paper presents positive preliminary verification of two concepts of adaptive aerostats: (i) telescopic aerostats with multi-segmented construction and (ii) aerostats based on self-deployable tensegrity structures. In the case of telescopic aerostats, the conducted simulations prove that control of internal pressure and resulting extension of the aerostat can be used to achieve desired altitudes possibly fast and provide significant reduction of energy consumption. In the case of tensegrity-based aerostats, the aerostat volume and resulting equilibrium altitude can be effectively modified by control of tendons, and such operation does not induce excessive values of stresses. It can be concluded that both proposed constructions significantly increase controllability of aerostat vertical mobility, and thus they are promising solutions in future applications.
References
Brayan T, Rava G (2009) British airships 1905–1930. Osprey Publishing, New York
Ege L (1974) Baloons and airships. Blandford Press, London
Ghanmi A, Sokri A, Airships for military logistics heavy lift. Defence R&D Canada
Future Aerostat and Airship Investment Decisions Drive Oversight and Coordination Needs, Report to the Subcommittee on Emerging Threats and Capabilities, Committee on Armed Services, U.S. Senate, GAO, 2012
Saleh S, Weiliang HE (2018) New design simulation for a high-altitude dual-balloon system to extend lifetime and improve floating performance. Chin J Aeronaut 31(5):1109–1118
Araripe d'Oliveira F, Lourenço de Melo FC, Devezas TC (2016) High-altitude platforms—present situation and technology trends. J Aerosp Technol Manag So José dos Campos 8(3):249–262
Eguchi K, Yokomaku Y, Mori M (2000) Overview of stratospheric platform airship R&D program in Japan. In: AIAA 14th LTA TCCE, Acron, OH, July
Knap L, Graczykowski C, Holnicki-Szulc J, Wołejsza Z (2020) Strategies for reduction of energy consumption during ascending and descending process of modern telescopic HAPS aerostats. Bull Pol Acad Sci: Techn Sci. https://doi.org/10.24425/bpasts.2020.131833,68(1),pp.155-168
Holnicki-Szulc J, Świercz A, Kostro S, Knap L, Graczykowski C (2021) A concept of the SDT (Self-Deployable Tensegrity) structure for the rapid and precise lifting of helium aerostats, especially into the stratosphere, Patent No. 3770352, EPO, 2021
Knap L, Świercz A, Graczykowski C, Holnicki-Szulc J (2021) Self-deployable tensegrity structures for adaptive morphing of helium-filled aerostats. Archives Civil Mechan Eng 21(159). https://doi.org/10.1007/s43452-021-00292-6
Acknowledgements
The authors acknowledge the support of the National Centre for Research and Development and the National Science Centre, Poland, granted in the framework of the TANGO 4 programme (project TANGO-IV-C/0001/2019-00).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Knap, L., Świercz, A., Graczykowski, C., Holnicki-Szulc, J. (2023). The Concepts of Telescopic and Self-Deployable Tensegrity-Based Helium-Filled Aerostats. In: Shukla, D. (eds) Lighter Than Air Systems . Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-6049-9_11
Download citation
DOI: https://doi.org/10.1007/978-981-19-6049-9_11
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-6048-2
Online ISBN: 978-981-19-6049-9
eBook Packages: EngineeringEngineering (R0)