
Abstract
Real-time hybrid simulation (RTHS) plays an important role in obtaining the structural responses under dynamic loads. However, the nonlinearities in physical testing system often induce time-delay, which is detrimental to RTHS. To deal with this issue, a Kalman filter based adaptive delay compensation (KF-ADC) method had been proposed based on the discrete system model, whose parameters is estimated by Kalman filter (KF) algorithm. The delay compensation method was validated through a Benchmark problem in RTHS. This study intends to further investigate the performance of KF-ADC dealing with nonlinear physical substructures (PS). Virtual RTHSs are carried out on PS with bilinear and Bouc-wen restoring force characteristics, respectively. The results of virtual RTHSs reveal that the KF-ADC has an excellent tracking performance for nonlinear physical substructure and is beneficial for improving the accuracy and stability of RTHS.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
A huge number of efforts had been paid to obtain the structural seismic performance, such as the quasi-static testing, shaking table testing, and hybrid simulation (HS) [1]. Due to the effectiveness and economics in acquiring the structural dynamics, HS, especially the real-time HS (RTHS), has received widespread attention.
However, the accuracy and stability of RTHS are often affected by the time-delay, which is usually induced by the nonlinearities of physical testing system. In the past almost two decades, many delay compensation methods or control strategies had been proposed. Polynomial extrapolation time-delay compensation method was first proposed by Horiuchi et al. [2], which is the most widely used time-delay compensation method in RTHS. Darby et al. [3] proposed a more accurate time-delay estimation method based on linear feedback theory, and verified the performance of the method for linear and nonlinear systems. Chen et al. [4] proposed an adaptive inverse control compensation method using an error tracking indicator to adapt compensation parameters. Then Phillips and Spencer proposed a model-based feedforward - feedback actuator control [5]. In addition, Chae et al. [6] proposed an adaptive time series compensation scheme, which updates the coefficients of the system transfer function by online real-time linear regression analysis. Zhou and Li [7] proposed an improving model-based compensation method considering the error between the identified transfer function and the control plant.
For practical application, Ning et al. [8] proposed an adaptive delay compensation method based on the discrete physical testing system model. Subsequently, the Kalman filter was introduced to improve the parameter estimation method by Ning et al. [9], which is termed as KF-ADC. This study intends to further investigate the performance of the proposed KF-ADC method in dealing with nonlinear substructure.
2 Kalman Filter-Based Adaptive Control Method
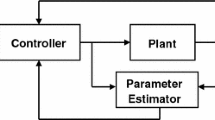
Block diagram of real-time hybrid simulation with KF-ADC is shown in Fig. 1. As can be seen in this figure, the KF-ADC consists of a feedforward controller with adjustable parameters and an online parameter estimator using Kalman filter algorithm. The transfer system and PS can be collectively seen as system model. The parameter estimator can rapidly calculate the system model by the relationship between on the command displacement \(d^{{\varvec{c}}}\) and the measured displacement \(d^{{\varvec{m}}}\). Then, the estimated parameters are forwarded to the feedforward controller.

Block diagram of real-time hybrid simulation with KF-ADC.
In the proposed control strategy, the feedforward controller is determined by the discrete inverse model of the system model, which is formulated as a difference equation, namely
where \(\user2{\varphi }_{k}^{T} = [d_{k}^{{}} ,d_{k - 1}^{{}} , \cdots ,d_{k - q}^{{}} ],{\mathbf{x}} = [x_{1} ,x_{2} , \cdots ,x_{q} ]^{{\varvec{T}}}\). \(d\) and \(d^{c}\) are the desired displacement and the command displacement, respectively; x are the parameters of system model; x is the state vector which is consists of the parameter x. It should be noted, for application convenience, the measured displacements \(d^{m}\) are replaced by the desired displacement \(d\), as shown in Eq. (1).
The parameters x in Eq. (1) are estimated and updated by the estimator, which can be written in the state-space format, namely
where \({\rm{H}}_{k} = [d_{k}^{m} ,d_{k - 1}^{m} , \cdots ,d_{k - q}^{m} ]\), yk is the displacement command at the k-th time step, and \(\upsilon\) is the measurement noise that satisfies normal distribution
where R is the measurement noise covariance.
3 RTHS with Nonlinear Physical Substructure
3.1 Overview of the Simulation
The validation simulations are carried out using the Benchmark problem in RTHS by Silva et al. [10]. A three-story two-bay moment-resisting steel frame structure is divided into a physical substructure with one-bay one-story and a numerical substructure with the rest. The structure is modeled by a three degree of freedom equation of motion, where only the horizontal DOF is considered. The PS and the NS are associated together by a transfer system, which is represented by transfer functions as shown in Fig. 2. It should be noted, the parameters in the figure are estimated employing the experimental data, and uncertainties in the parameters are accounted for by using random variable with a normal distribution of each parameter. The parameters used in this study are listed in Table 1.

Block diagram of the transfer system in the Benchmark problem.
In this study, the reference floor mass and modal damping ratio are 1300 kg and 3%, respectively. Two types of nonlinear physical substructure are considered, one is represented by a bilinear model (Kz = 1.1688 × 106 N/m, dy = 0.0025 m, b = 0.45) and the other is represented by a Bouc-wen model (k = 1.19 × 106 N/m, α = 0.02, β = 300, γ = 300, n = 1.05). The external excitation is El-Centro earthquake record, which is scaled to 0.3g. A total of 21 virtual RTHS were carried out, one is for transfer system with nominal value, and the others are with perturbed parameters. Pure numerical simulation with ideal transfer system is served as the reference solution.
The adaptive controller designed by Ning et al. [9] is used in this study, which is given by:
The initial value x0, measurement noise variance R, and the initial covariance matrix are given by [11.2458 −21.0426 14.6847 −3.9078]T, 1 × 10–4, and diag([11.24582 21.04262 14.68472 3.90782]), respectively.
3.2 Analysis of Simulation Results
The displacement time histories of the first story for the nominal case with bilinear model and Bouc-wen model are shown in Fig. 3 and Fig. 4, respectively. The reference solutions are also provided in these two figures.
It is seen from these two figures that the measurement displacements are almost identical to the reference ones, demonstrating that the time-delay of the system is almost eliminated with the proposed adaptive controller. However, a peak tracking error can be observed from the enlarged figures, especially in Fig. 4(b). The result indicates that the PS of Bouc-wen model had stronger nonlinear compared with bilinear model, which can be seen from Fig. 5(b). Tough, an excellent tracking performance is still observed from Figs. 3 and 4. It can be also concluded that the controller designed using the linear system can compensate the varying time-delay of nonlinear system. This can be further validated by the small mean and standard deviation of the 21 virtual RTHSs, as shown in Table 2 and Table 3, respectively.

Displacement time histories of the first floor for bilinear model. (a) Overview; (b) Enlarged.

Displacement time histories of the first floor for Bouc-wen model. (a) Overview; (b) Enlarged.

Hysteresis relationship of two nonlinear physical substructures. (a) bilinear model; (b) Bouc-wen model.
In Table 2 and Table 3, J1 represents tracking time delay; J2 and J3 are the normalized root mean square of the tracking error and the peaking tracking error, respectively; J4 to J6 denotes the root mean square errors of the displacement of the first, second and third floor, respectively. J7 to J9 are the peak errors of the first, second and third floor, respectively. The computational formulas of J1 to J9 can be found in the Benchmark problem [10].
As shown in Table 2, the values of evaluation criteria are mostly less than 5%. The nominal values of evaluation criteria are almost same with the mean values of ones. In addition, the standard values of J1, J2, and J3 are less than 1%. Overall the table suggests that the proposed delay compensation method has an excellent tracking performance and exhibits a strong robustness.
In comparison with Table 2, the values of evaluation criteria in Table 3 are much larger. And, some perturbed cases are more than 15%, which demonstrates that the physical substructure with Bouc-wen model has stronger nonlinear than that with bilinear model. However, the standard values of J1 to J3 are less than 1%, meanwhile the mean values of J1 to J3 are almost identical with the nominal values of ones. It demonstrates that the performance of KF-ADC is acceptable in solving variant time-delay problem of stronger nonlinear system.
The evaluations of the estimated system model parameters for two nonlinear physical substructures are respectively shown in Fig. 6 and Fig. 7. As shown in these two figures, the variation trends of the system model parameters for two physical substructures are almost identical. Actually, in these two graphs, the convergence trend of system model parameters is not obvious. It is because that the compensator is designed using linear system and is used to address the variant time-delay of a higher-order nonlinear system. Combined with the above analysis, the performance of the proposed KF-ADC still can be acceptable.

Evaluations of the estimated system model parameters for bilinear model.

Evaluations of the estimated system model parameters for bouc-wen model.
4 Conclusion
A Kalman filter-based adaptive control strategy is proposed to deal with the variant time-delay problem of RTHS with nonlinear physical substructures. In this method, a parameterized discrete inverse model of the physical testing system is served as the feedforward controller and a Kalman filter is used to estimate and update the parameters by the relationship between the measurement displacement and command displacement. A total of 42 vRTHSs are carried out to investigate the capability of KF-ADC in the benchmark problem. Conclusions can be addressed as follow:
-
(1)
The evaluation criteria for the nominal cases are almost identical to that for the perturbed cases and that the standard values of J1 to J3 are less than 1%. It demonstrates that KF-ADC has a brilliant compensation performance and strong robustness for nonlinear system.
-
(2)
Discrepancies in amplitude can be observed from the displacement time histories, especially in the case of PS with Bouc-wen model. The system model parameters cannot converge to constant values for the cases with nonlinear substructures. It is because that the compensator is designed by linear discrete model and is used to address the variant time-delay of nonlinear system. Hence, the accuracy of RTHS with KF-ADC is acceptable.
References
Horiuchi, T., Inoue, M., Konno, T., et al.: Real-time hybrid experimental system with actuator delay compensation and its application to a piping system with energy absorber. Earthquake Eng. Struct. Dynam. 10(28), 1121–1141 (1999)
Nakashima, M., Kato, H., Takaoka, E.: Development of real-time pseudo dynamic testing. Earthquake Eng. Struct. Dyn. 21(1), 79–92 (1992)
Darby, A.P., Williams, M.S., Blakeborough, A.: Stability and delay compensation for real-time substructure testing. J. Eng. Mech. 128(12), 1276 (2002)
Cheng, C., Ricles, J.M.: Tracking error-based servohydraulic actuator adaptive compensation for real-time hybrid simulation. J. Struct. Eng. 136(4), 432–440 (2010)
Phillips, B.M., Spencer, B.F.: Model-based feedforward-feedback actuator control for real-time hybrid simulation. J. Struct. Eng. 139(7), 1205–1214 (2013)
Chae, Y., Kazemibidokhti, K., Ricles, J.M.: Adaptive time series compensator for delay compensation of servo-hydraulic actuator systems for real-time hybrid simulation. Earthquake Eng. Struct. Dyn. 42(11), 1697–1715 (2013)
Zihao, Z., Ning, L.: Improving model-based compensation method for real-time hybrid simulation considering error of identified model. J. Vib. Control 27(21–22), 2523–2535 (2021)
Xizhan, N., Zhen, W., Chunpeng, W., Bin, W.: Adaptive feedforward and feedback compensation method for real-time hybrid simulation based on a discrete physical testing system model. J. Earthquake Eng. (2020)
Xizhan, N., Zhen, W., Bin, W.: Kalman filter-based adaptive delay compensation for benchmark problem in real-time hybrid simulation. Appl. Sci. 10(20), 7101 (2020)
Silva, C.E., Gomez, D., Maghareh, A., Dyke, S.J., Spencer, B.F.: Benchmark control problem for real-time hybrid simulation. Mech. Syst. Signal Process. 135, 106381 (2020)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Huang, W., Ning, X. (2023). Kalman Filter Based Adaptive Control for Real-Time Hybrid Simulation with Nonlinear Substructure. In: Guo, W., Qian, K. (eds) Proceedings of the 2022 International Conference on Green Building, Civil Engineering and Smart City. GBCESC 2022. Lecture Notes in Civil Engineering, vol 211. Springer, Singapore. https://doi.org/10.1007/978-981-19-5217-3_97
Download citation
DOI: https://doi.org/10.1007/978-981-19-5217-3_97
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-5216-6
Online ISBN: 978-981-19-5217-3
eBook Packages: EngineeringEngineering (R0)