
Abstract
In recent years, vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2V) communication are the leading technologies in intelligent transportation systems. With V2I and V2V, new strategies are enabled to better facilitate emergency rescue and traffic emergency management. Since signalized intersection is the major source of delay and congestion, how to prioritize emergency vehicles (EVs) at intersections becomes an indispensable research topic and has drawn extensive studies. Albeit that emergency vehicles should be granted absolute priority, the influence of EVs on the intersection was rarely studied, especially when aggressive preemption strategies are adopted. To this end, this paper is devoted to evaluating the impacts of EVs on the control of signalized intersections, as an effort to better emergency management. Mixed-integer linear programming models are developed to optimize the intersection control before and after the pass of EVs, respectively. Case studies indicate that, by assuming the EV will take exclusively one lane at the intersection, the average delay could increase by 11.28% along with a capacity decrease of 6.63%.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
With the rapid development of urbanization, urban transportation systems are becoming increasingly congested, bringing a series of side effects such as air pollutions, noise, and traffic accidents. Traffic accidents, in particular, endanger the life and property of the general public. Each incident poses a challenge to the emergency management capacity of the transport agency. According to research, half of the serious injuries can be treated if treated in a timely manner within 30 min of an accident. In medical science, the 30 min are called “prime time” [1].

Emergency vehicle travel in smart connected environment
In traditional intersections, emergency vehicles cannot have access to real-time information, such as queue length and signal, which hinders the key decision-making of speed control and route choices. It is common that a large queue exists at the intersection when emergency vehicles arrive due to the lack of communication and cooperation. In the environment of the smart connected vehicles, real-time sharing of vehicles and road information, can be realized through V2V and V2I to enable smarter EV preemption as well as intersection control.
In this area, a large body of research focused on the development of emergency vehicle priority systems. An emergency vehicle priority system ensures the passage of emergency vehicles through priority signal control, route guidance and social vehicle diversion [2]. The use of TPNS in the modeling emergency vehicle priority system was studied to ensure that emergency vehicles can pass through intersections quickly [3]. There are also dynamic preemption strategies that tend to balance different objectives [4].
In recent years, Intelligent Connected Technology is also of great significance to emergency rescue and traffic emergency management control. Intersection signal coordination optimization, enabled by smart connected technology, can accurately obtain the vehicle trajectory information and feed it to the controller for better optimization performance. Intersection collisions are studied in the context of CVIC, so that vehicles can safely and quickly pass through the intersection without collision with other vehicles [5,6,7]. A lane advance strategy based on integer linear programming (ILP) algorithm was proposed to achieve the absolute priority of emergency vehicles by clearing lanes for approaching emergency vehicles [8].
In order to solve the problem of low traffic efficiency at intersections, two experimental scenarios were designed, using intelligent networked vehicles to guide multiple ordinary vehicles [9]. A * algorithm is used to solve the intelligent interconnected vehicle sequencing problem and find the shortest path quickly [10]. The influence of whether to force lane change on execution time in intelligent networked vehicle environment was discussed [11].
Most of the current research on emergency vehicle preemption gives priority to emergency vehicles based on a limited number of road detectors. The detectors are however costly, cumbersome to set up, and unreliable, especially under unfavorable weather. At the same time, under the control environment of traditional intersection,emergency vehicles cannot have access to the exact information of intersection, such as queue length, traffic information. Frequent acceleration and deceleration at crowded urban intersections make it even more challenging to dissipate queues when emergency vehicles arrive. This to some extent leads to aggressive preemption strategies, even with connected and automated vehicles [12, 13]. However, few studies investigated the influence of such preemption strategies. To this end, the present paper is devoted to evaluating the influence of EV preemption strategies on the intersection performance under optimal control.
2 Methodology
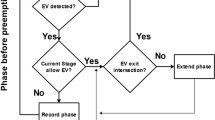
In this study, we assume to grant the emergency vehicles the highest priority so that they can pass through the intersection without delay. In the smart connect environment, a lane at an intersection can be cleared and used exclusively for EVs. When a lane is occupied by emergency vehicles, as shown in Fig. 1, the signal control plan is adjusted to optimize the intersection capacity for normal vehicles. In summary, we seek to evaluate the impacts on signalized intersections while ensuring the priority of emergency vehicles. The signal timing optimization and the collaborative control of the emergency vehicle are coordinated and modeled in a mixed-integer linear programming framework (Fig. 2).

Emergency vehicle occupancy
In view of the characteristics of the smart connected vehicles, the following assumptions are made.
-
1.
All vehicles are intelligent connected vehicles.
-
2.
All common vehicles voluntarily clear one lane for emergency vehicles through V2V and V2I communication.
-
3.
We assume perfect communication.
-
4.
Pedestrian-related factors (e.g., pedestrian-vehicle conflicts) are ignored to focus on the studied problem (Tables 1 and 2).
The developed model is as follows.
Subject to
In the constraints listed above, Eq. 1 represents the objective of the optimization, where capacity is positively correlated with traffic demand, and the problem can thus be converted into solving the common flow multiplier. Equation 2 indicates that movement should be greater than 1 in each lane. Equation 3 ensures the normal operation of the intersection as traffic demand increases. Equation 4 defines if lane q indicates no movement, then there is no traffic allocation in the lane. Equation 5 and Eq. 6 define the constraints on green start time \(\uppsi \) x,v and Ρx,v. Equation 7 and Eq. 8 ensure that all traffic movements on a lane q are consistent, with the green starting at the same time as the green received on the lane, and green duration time equals the green on the lane. Equation 9 defines the range of cycle length, ensuring that c is a reasonable value. Equation 10 indicates that the number of exit lanes on lane v should be greater than or equal to the number of lanes x in one movement.
Equation 11 denotes the lane q on the arm x is prohibited from turning onto other arms which do not include arm v when the lane q + 1 on the arm x allows turning onto the arm v to avoid unnecessary traffic collisions between adjacent lanes. Equation 12 defines the movements (x, v, q) (i, d, t) that a set of conflicts γ, and when both movements are allowed, we set the clearing time to avoid their conflicts. Equation 13 indicates the sequence of conflicting signaling groups. Equation 14 restricts the flow factor between adjacent lanes to make them equal. Equation 15 defines that the saturation on the lane q cannot exceed its maximum saturation Nx, q.
3 Case Study
In this section, we demonstrate the impacts of the EVs on the normal traffic flow at intersections with a series of numerical experiments. In order to solve the model in this paper, we apply it to the four-branch road intersection. By constraint (2)–(15) and mixed integer programming algorithm, a mixed integer linear programming model is established.Traffic signal optimization before and after the EV arrivals are conducted with the commercial solver Gurobi, respectively. At the studied four-leg intersection, the number of arms is set at 4. Since emergency vehicle traffic occupies one lane, one of the four legs can be reconsidered with 3 approaching lanes. Considering the principle that the number of exit lanes is greater than the number of approaching lanes, the exit lanes of each arm remain 4. The maximum cycle length is set to be 120 s. Assume that the minimum duration of all vehicle movements equals 5 s with a turning radius of 12 m. The maximum acceptable saturation per lane is set at 0.9. The time difference between a valid green and an actual green is set as 1 s, and the clear time for movements with conflicting trajectories is set as 3 s (Table 3).
To demonstrate the results of allocating one exclusive lane for the EV. All simulation scenarios are implemented via the python platform. Specifically, before the arrival of EV, we assume λ = 2.23 c = 120 s, while after the EV arrival, we assume λ = 2.26 c = 120 s.
The results of optimization indicate the maximum capacity of the direction of motion based on the pre-set saturation flow. X is calculated using the ratio of the total assigned flow in the direction of motion to the capacity of the traffic, and then the delay is calculated according to Eq. 16 (Fig. 3 and Table 4).

Flow distribution at intersections
In Fig. 4 and Fig. 5, group 1 represents the cases of lane occupancy by emergency vehicles and group 2 indicates the scenario before EV arrival. As can be seen from Fig. 4, delays generally increased due to the EV. Calculations of the overall average delay show that the overall average delay increased by a modest 11.28%. The movement to the right of the north entrance observed the biggest increase in delays at 36.63%. Of these, delays decreased in four directions, with the largest decrease of 30.94%. Comparisons of the traffic capacity of the two optimization results can be seen in Fig. 5. Following the occupancy of lanes by emergency vehicles, the overall average capacity decreased by 6.63%.

Delay comparison between two optimizations

Traffic capacity comparison between two optimizations
4 Conclusion
In this paper, we developed an optimization framework to evaluate the impact of aggressive emergency vehicles preemption strategies under optimal intersection control. A mixed-integer linear programming model is developed and solved by the Gurobi software. Numerical simulation results indicate that delay and capacity changes vary, with the overall average delay increase by 11.28% and the overall average capacity decrease by 6.63%. Future extension of the present study can be exploring the possibility of incorporating EV route choice with intersection optimization.
References
Calixto, E., Larouvere, E.: The regional emergency plan requirement: application of the best practices to the Brazilian case. Saf. Sci. 48, 991–999 (2010)
Shibuya, S., Yoshida, T., Yamashiro, Z., Miyawaki, M.: Fast Emergency Vehicle Preemption Systems. Transp. Res. Rec. J. Transp. Res. Board. 1739, 44–50 (2000)
Huang, Y., Weng, Y., Zhou, M.: Design of traffic safety control systems for emergency vehicle preemption using timed petri nets. IEEE Trans. Intell. Transp. Syst. 16, 2113–2120 (2015)
Salih, A., Lewis, A., Chung, E.: Dynamic preemption algorithm to assign priority for emergency vehicle in crossing signalised intersection. IOP Conf. Ser. Mater. Sci. Eng. 518, 022038 (2019)
Lee, J., Park, B.: Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment. IEEE Trans. Intell. Transp. Syst. 13, 81–90 (2012)
Lu, C., Liu, C.: Ecological control strategy for cooperative autonomous vehicle in mixed traffic considering linear stability. J. Intell. Connect. Veh. 4, 115–124 (2021)
Xu, Y., Ye, Z., Wang, C.: Modeling commercial vehicle drivers’ acceptance of advanced driving assistance system (ADAS). J. Intell. Connect. Veh. 4, 125–135 (2021)
Wu, J., Kulcsár, B., Ahn, S., Qu, X.: Emergency vehicle lane pre-clearing: from microscopic cooperation to routing decision making. Transp. Res. Part B Methodolog. 141, 223–239 (2020)
Peng, B., Keskin, M., Kulcsár, B., Wymeersch, H.: Connected autonomous vehicles for improving mixed traffic efficiency in unsignalized intersections with deep reinforcement learning. Commun. Transp. Res. 1, 100017 (2021)
Wu, J., Ahn, S., Zhou, Y., Liu, P., Qu, X.: The cooperative sorting strategy for connected and automated vehicle platoons. Transp. Res. Part C Emerging Technol. 123, 102986 (2021)
Ali, Y., Zheng, Z., Haque, M.: Modelling lane-changing execution behaviour in a connected environment: a grouped random parameters with heterogeneity-in-means approach. Commun. Transp. Res. 1, 100009 (2021)
Zhu, W., Wu, J., Fu, T., Wang, J., Zhang, J., Shangguan, Q.: Dynamic prediction of traffic incident duration on urban expressways: a deep learning approach based on LSTM and MLP. J. Intell. Connect. Veh. 4, 80–91 (2021)
Kong, X., Wu, J., Qu, X.: An online processing method for the cooperative control of connected and automated vehicle platoons. In: Smart Innovation, Systems and Technologies, pp. 133–139 (2021)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Xie, J., Wu, J., Yang, R. (2022). On the Impact Analysis of Emergency Vehicles Preemption on Signalized Intersections with Connected Vehicles. In: Bie, Y., Qu, B.X., Howlett, R.J., Jain, L.C. (eds) Smart Transportation Systems 2022. KES-STS 2022. Smart Innovation, Systems and Technologies, vol 304. Springer, Singapore. https://doi.org/10.1007/978-981-19-2813-0_16
Download citation
DOI: https://doi.org/10.1007/978-981-19-2813-0_16
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-2812-3
Online ISBN: 978-981-19-2813-0
eBook Packages: EngineeringEngineering (R0)