
Abstract
In cooperative vehicle infrastructure systems (CVIS), common vehicles can offload their computing tasks that are difficult to complete in time for them to the roadside multi-access edge computing (MEC) servers for execution. However, resources of roadside MEC servers are still limited in the large-scale deployment of vehicles. To address this problem, this paper introduces the task offloading from user vehicles to surrounding resource-rich service vehicles, and constructs communication and computation models for computation offloading. Subsequently, we propose the utility function for computation offloading in which the benefits and costs of task offloading are fully considered, and then derive the optimal strategy for task offloading. The experimental results show that the latency and utility values of computation offloading with the proposed strategy are significantly better than those of other computation offloading strategies, which improves the efficiency of task execution in CVIS.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
In recent years, various vehicle road collaborative applications emerge in endlessly. These advanced auxiliary applications covering different aspects put forward higher requirements for vehicle computing and storage capacity [1]. However, the resources that each vehicle can use for computing and storage services are always limited, so it is not enough to support the operation of various on-board high-performance applications.. Therefore, researchers have proposed a new computing architecture of multi access edge computing (MEC) [2] to make up for the lack of resource [3]. In order to reduce the pressure on computing and storage resources of vehicles or intelligent roadside infrastructure and shorten the data end-to-end transmission delay, MEC migrates network cloud computing resources to the network edge close to various terminal devices. To make use of these computing and storage resources at the network edge, vehicles need to migrate their difficult computing tasks to the edge nodes. This process of task migration is generally called computing offload. The purpose of designing an efficient and stable edge computing task migration and offloading strategy is to make full and effective use of edge computing resources.
Although some studies have designed the communication architecture and computing offload scheme in MEC network under the vehicle road collaboration environment, most of the research methods of traditional cloud computing are simply applied to edge computing, without considering that the MEC server deployed on the roadside is also subject to many restrictions and cannot deploy too many resources, which reduces the application efficiency of the whole vehicle road collaboration system. Considering that some high-performance autonomous vehicles running on the road are also regarded as an external service resource, and the spare unused computing and storage resources on these vehicles are used to share the pressure of roadside servers, this paper proposes a computing migration and offloading destination selection strategy for ordinary vehicles in the environment where roadside MEC and on-road service vehicles can provide computing services.
2 Situation Analysis
At present, some communication architectures and computing offload schemes in MEC network under vehicle road cooperation environment have been proposed by relevant studies at home and abroad. Reference [4] studies the dynamic sharing of 5th-Generation (5G)spectrum, and designs a sharing architecture of Dedicated Short-Range Communication (DSRC) and 5G spectrum for immersive experience driven vehicle communication. Reference [5] proposes a two-level edge computing architecture for automated driving services in order to make full use of the intelligence at the wireless edge, and investigates the research challenges of wireless edge caching and vehicular content sharing and develops possible solutions. In reference [6], a big data analysis system based on MEC is proposed for the charging scenario of electric vehicles. The MEC server with mobile sensing ability interacts with the electric vehicles within its scope, so as to disseminate the predicted charging availability information of charging station, collect the big data of electric vehicle driving, and realize decentralized calculation on the basis of data mining and aggregation. In reference [7], the problem of task offloading is studied from the perspective of matching, and a price based matching algorithm is proposed to optimize the total network delay. In reference [8], deep reinforcement learning is used to design a resource allocation strategy for the joint design problem of communication, caching and computing, and the challenges of vehicle mobility and strict service deadline constraints are considered.
However, most of the studies in the above literatures simply apply the traditional research methods of cloud computing to edge computing, and seldom consider that the computing and storage resources of MEC server are not as infinite as cloud computing [1]. The MEC server deployed on the roadside is also limited by the roadside space and the deployment cost of operators, so it can not deploy too many resources. As a result, in the large-scale application environment of vehicle road collaboration, the MEC server can not serve all vehicles, which reduces the application efficiency of the whole vehicle road collaboration system. In this case, we can consider some high-performance self driving vehicles running on the road as an external service resource, and use the unused computing and storage resources on these vehicles to share the pressure of roadside servers. In this way, ordinary vehicles on the road can not only transfer their own complex computing tasks to the MEC server on the roadside, but also transfer their tasks to the high-performance service vehicles with similar trajectories around, so as to further balance the load of the whole system. Therefore, in this environment where both the roadside MEC and the surrounding service vehicles can realize the computing migration and offloading, it is necessary to further study the vehicle task migration and offloading strategy, that is, how to choose the destination of the task migration under different conditions, so as to obtain greater benefits and reduce the cost, and finally achieve the optimal state of the system.
This paper focuses on the choice strategy of the destination for the calculation migration and offloading of ordinary vehicles in the environment that both MEC and road service vehicles can provide computing services. In the process of decision-making, the vehicle will consider the benefits and costs. In terms of the benefits, the most important thing for vehicles is the final execution time after the task has been transferred and offloaded. If the task is performed faster than the vehicle locally, the vehicle can get a positive benefit. If the execution time exceeds the maximum time limit of the task, the vehicle will not benefit. The cost of vehicles is mainly measured by the price of calculation services. Because MEC on the road can provide strong computing resources, it can make the price of MEC service on the road higher than that of the service vehicles on the road in order to promote the full utilization of resources. Therefore, this paper first considers the application, communication and calculation model of edge computing and offloading which is oriented to vehicle road coordination, and takes the influence of vehicle movement into account, and then calculates the total execution time of task migration and offloading. Then, based on the vehicle task migration and offloading model, we propose the calculation migration and offloading utility function in the scenario of vehicle road collaborative edge calculation. In order to obtain the task migration and offloading strategy of each vehicle under the maximum utility of the system, we consider the task migration behavior of all vehicles. Finally, the software is used to solve the problem and the simulation results verify the advantages of the proposed method compared with other task migration and offloading schemes.
3 System Model
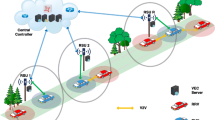
In the vehicle road collaborative scenario, ordinary vehicles on the road are connected to the surrounding high-performance vehicles or roadside MEC server through V2V (vehicle to vehicle) and V2R (vehicle to road) communication, and then the task migration and offloading strategy is used to select whether the task migration and offloading is to the roadside server or the surrounding vehicles that can provide services, so as to ensure the maximum utility of the whole system.
In this paper, we consider the vehicle task migration problem under the coverage of a single MEC server, and assume that the set of user vehicles in the coverage of the MEC is n = {1, 2, …, n}. In the process of migration and offloading of vehicle computing tasks, it is necessary to determine a computing offloading model to estimate the benefits and costs. So we will propose calculation and communication models, evaluate the task execution delay when the task is transferred and offloaded to roadside MEC and surrounding service vehicles, and finally give the utility function of the system according to the revenue and cost of vehicles.
3.1 Communication Model
According to the method in reference [9], we can use three parameters to represent the application model of vehicle \(i\) which needs to calculate the migration and offloading. \(L_i\) is the size of the input data of the calculation task, \(\alpha_i\) is the computational complexity of the task, \(t_{i,max}\) represents the maximum deadline required for the task. If the task can be completed within the required maximum time limit, the vehicle will get higher revenue, otherwise it will not get revenue, and it will also have losses due to the cost. For the sake of simplification, we consider the application of each vehicle as a whole task, that is, we only consider the whole task to a single destination.
In the communication model, we consider that V2I (vehicle to infrastructure) communication mode is adopted between vehicle and roadside MEC access point, and V2V communication mode is adopted between user vehicle and service vehicle, and assume that the communication channels of these two kinds of communication are flat Rayleigh channels [9]. In this model, \(d_i^{ - \theta }\) represents the path loss of communication, where \(d_i\) is the distance from vehicle \(i\) to MEC access point or surrounding service vehicle, and \(\theta\) is the path loss index of communication. In addition, \(h_i\) and \(N_0\) represent channel fading factor and Gaussian white noise power respectively.
In this way, the data transmission rate between vehicle \(i\) and roadside MEC receiving point can be presented by the following formula:
Among them, \(W_i\) is the channel bandwidth, \(P_i\) is the transmission power of the vehicle, \(d_{i,E}\) indicates the distance between the vehicle and the roadside edge node when the vehicle task is transferred and offloaded.
Similarly, we can express the transfer rate of task migration and offloading between user vehicle \(i\) and its surrounding service vehicle \(j\) as follows:
In the formula,\(d_{i,j}\) represents the distance between user vehicle \(i\) and service vehicle \(j\) when the task is transferred and offloaded.
3.2 Simulation Experiment
Compared with the traditional mobile terminal devices, vehicles have more sufficient energy sources, so the vehicle road collaborative computing task migration and offloading focuses less on the energy consumption of task migration and offloading, and more on the processing delay of offloading task. In the vehicle road collaborative computing scenario, the processing delay of the offloading task mainly includes the communication transmission delay of the task and the calculation delay of the task execution. In accordance with [9], \(\beta_{i,U}\) represents the overhead of the uplink in the task transmission to the roadside. Since the amount of the result data after the task execution is generally small, the magnitude of the input data can be ignored. Here, we do not consider the delay caused by the return of the task execution result. Furthermore, the uplink transmission delay of vehicle \(i\) for task migration and offloading to the roadside MEC can be expressed as:
The execution time of the task on the roadside MEC server is:
where \(f_E\) is the computing power of MEC server. Therefore, the total processing delay of task migration and offloading from the user’s vehicle \(i\) to the roadside MEC server is as follows:
Similarly, the total processing delay of task migration and offloading from user vehicle \(i\) to its surrounding service vehicle \(j\) is as follows:
\(\beta_{i,req}\) represents the cost of the task to offload the request to the service vehicle \(j\). In this way, we can get the time when the vehicle \(i\)’s computing task is transferred to MEC server or peripheral service vehicle \(j\) based on the computing offload model. Then, we take these data results to build the utility function of vehicle computing task migration and offloading, in which we consider the time benefit of task execution and the price cost of computing service:
Among them, \(a_i\) is the final calculation migration behavior of the vehicle, if \(a_i = 1\), the vehicle will move to the roadside MEC. \(a_i = 0\) indicates that the vehicle is migrating to the surrounding vehicles, \(p_E\) is the price of task migration and offloading to the roadside MEC for calculation, \(\rho_j\) is the ratio of the price calculated by the task in the surrounding vehicles and the price calculated by the MEC on the roadside. Therefore, in order to ensure the load balance of the system, the optimal migration and offloading strategy pursued by all ordinary vehicles can be expressed as follows:
In this way, vehicles can make decisions according to this optimal task migration strategy, so as to balance the computing pressure of roadside MEC server in large-scale vehicle environment and maximize the global utility.
4 Analysis of Experimental Results
In this section, we use series of simulation results to verify the performance of the proposed strategy. Specifically, we use MATLAB to solve the optimal strategy in formula (8), and compare the performance of the strategy with other schemes in terms of average task delay and utility value. The relevant experimental parameters are shown in Table 1.
Firstly, we compare the average utility values of different task migration and offloading schemes through several experiments, and the results are shown in Fig. 1. Using the optimal strategy proposed in this paper, the average utility value of vehicles can be maintained at a high level. However, the average utility value of the random strategy and the other two fixed migration and offloading strategies is obviously low, and due to the influence of vehicle movement and channel fading, the utility value is constantly fluctuating and extremely unstable.

Variation of average utility value with the number of user vehicle in different strategies
Figure 2 shows the average time delay of task migration and offload under different migration and offload schemes. In this experiment, the maximum migration and offloading time required by the user’s vehicle \({\text{t}}_{{\text{i}},{\text{max}}}\) is set to 0.6 s. Through comparison, we can see that the average delay of the optimal strategy proposed in this paper will not exceed the maximum time required by the task under different number of users’ vehicles, and can continue to be stable at a lower value. At the same time, due to the continuous changes of vehicle movement and channel state, the average delay can not be maintained at a stable level by the random strategy and the other two fixed migration and offloading strategies. Therefore, this experiment shows the advantage of the task migration and offloading strategy in controlling the task execution delay.

The change of expected delay with the number of users’ vehicles in different strategies
5 Conclusions
In this paper, the task migration and offloading behavior of each vehicle to the roadside MEC in the vehicle road collaborative scenario is regarded as the occupation of server resources. In order to ensure that the roadside MEC server will not exceed the load in the large-scale vehicle deployment environment, the vehicle workshop computing task migration and offloading is introduced to share the pressure of the roadside server. Furthermore, this paper presents the application, communication and computing model of vehicle computing task migration and offloading in vehicle road collaborative scenario, and proposes the utility function of vehicle task migration and offloading decision, and deduces the optimal strategy. According to the revenue and cost of task migration estimated by this function, vehicles can decide to migrate tasks to roadside MEC or peripheral service vehicles. Through series of experiments, we compare the average utility and time delay of this strategy with other task migration and offload schemes, and verify the performance improvement of the proposed strategy. In the future, the model will be extended to multi vehicle and multi MEC collaboration environment to maximize its utility.
References
Wang, Y., Lang, P., Tian, D., et al.: A game-based computation offloading method in vehicular multiaccess edge computing networks. IEEE Internet Things J. 7(6), 4987–4996 (2020)
Taleb, T., Samdanis, K., Mada, B., et al.: On multi-access edge computing: a survey of the emerging 5G network edge cloud architecture and orchestration. IEEE Commun. Surv. Tutorials 19(3), 1657–1681 (2017)
Pham, X.Q., Nguyen, T.D., Nguyen, V.D., et al.: Joint node selection and resource allocation for task offloading in scalable vehicle-assisted multi-access edge computing. Symmetry 11(1), 58 (2019)
Zhou, H., Xu, W., Bi, Y., et al.: Toward 5G spectrum sharing for immersive-experience-driven vehicular communications. IEEE Wirel. Commun. 24(6), 30–37 (2017)
Yuan, Q., Zhou, H., Li, J., et al.: Toward efficient content delivery for automated driving services: an edge computing solution. IEEE Netw. 32(1), 80–86 (2018)
Cao, Y., Song, H., Kaiwartya, O., et al.: Mobile edge computing for big-data-enabled electric vehicle charging. IEEE Commun. Mag. 56(3), 150–156 (2018)
Liu, P., Li, J., Sun, Z.: Matching-based task offloading for vehicular edge computing. IEEE Access 7, 27628–27640 (2019)
Hu, R.Q.: Mobility-aware edge caching and computing in vehicle networks: a deep reinforcement learning. IEEE Trans. Veh. Technol. 67(11), 10190–10203 (2018)
Wang, Y., Sheng, M., Wang, X., et al.: Mobile-edge computing: partial computation offloading using dynamic voltage scaling. IEEE Trans. Commun. 64(10), 4268–4282 (2016)
Acknowledgements
This paper is supported by the Central Public Research Institutes Special Basic Research Foundation (2021-9065b).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Xia, H., Liu, Y., Wei, X., Dong, G. (2023). Offloading Strategy of Computing Tasks in Cooperative Vehicle Infrastructure Systems. In: Jain, L.C., Kountchev, R., Zhang, K., Kountcheva, R. (eds) Advances in Wireless Communications and Applications. ICWCA 2021. Smart Innovation, Systems and Technologies, vol 299. Springer, Singapore. https://doi.org/10.1007/978-981-19-2255-8_13
Download citation
DOI: https://doi.org/10.1007/978-981-19-2255-8_13
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-2254-1
Online ISBN: 978-981-19-2255-8
eBook Packages: EngineeringEngineering (R0)