
Abstract
Modern Power systems are designed for the fine tuning of frequency and less tolerance for system frequency deviation from nominal value. The Power System is dynamically subjected to the small perturbations of load leading to non-oscillatory Instability due to insufficient damping. The article entente the multi area load frequency control and dynamic and transient stability analysis. It dispenses the simulation of three area power systems with medium and large perturbations of load, with three cases for both kinds of power systems. Case1 without any controller, case2 with PI controller and case3 with Fuzzy Controllers. The simulation is carried out for three area power system with all three cases. In this article the simulation results of three area power system for all three cases have been presented. The simulation results demonstrate the effectiveness of Fuzzy Control perpetuates the frequency with in the endurable range of frequency and subsequently it ensures the dynamic as well as transient stability of both the Power systems against load disturbances.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
- Fuzzy logic
- Load frequency control
- Small signal stability
- Stability improvement
- Single area power system
- Two area power systems
1 Introduction
The management of modern power systems became most difficult task to ensure the system security and reliability with good quality. India is aiming at forming a single national grid with fine tuning of frequency all over the system, constituted with many of the power system components and distinct loads. The load perturbation on all over the grid is dynamically varying, leads to frequency deviations over each of the control areas. The focus of this article is to maintain the constant or tolerable range of frequency in all control areas of power grid. The single area power system is modelled as a single transfer function block diagram, comprised of governor, turbine and generator including load transfer function models. The two-area model is composed of two single areas with different individual block models of different parameters connected together with a tie line model. The Simulink models have been developed for both single area and two area power systems to carryout simulation study and analysis. These simulation model of three area power system with three different case studies viz. case I: with 5% load disturbance with all three sub cases of (a), (b) and (c) without any controller, with PI controller and with Fuzzy controller respectively. Case II: with 5% load disturbance with all three sub cases of (a), (b) and (c) without any controller, with PI controller and with Fuzzy controller respectively. Case III: with 5% load disturbance with all three sub cases of (a), (b) and (c) without any controller, with PI controller and with Fuzzy controller respectively [1,2,3,4,5,6].
2 Single Area Power System
The power system network comprehends of many distinct loads with huge transmission and distribution networks. The complete network is categorized into different control areas based on frequency deviation over the part of power network. The small signal model is derived with individual power system components viz. Speed Governor, Turbine and Generator including load models.
2.1 Speed Governor Model
The load on power system is continuously varying may lead to speed deviation subsequently it leads to frequency fluctuations. The speed governing system is used to control these fluctuations. The speed governing system composed of fly ball speed governor, hydraulic amplifier and speed changer with linkage mechanism. The governor has two basic inputs, one is changes in reference power and the second is frequency variations are modelled into an equation, which describes both of these inputs as portray in the below equation and Fig. 1. Time constant (Tg) (as expressed in terms of a constant, depends on orifice, cylindrical geometries and fluid pressure of Hydraulic Amplifier and its typical value is in the range of 0.1 to 0.6 s [3,4,5,6,7].
2.2 Turbine Model
Turbine model has been derived with a single stage turbine with a single time constant of Tt and typical value is in the range of 0.3 to 0.7 s. The transfer function model of a single time constant turbine model is depicted in below equations (Fig. 2).

Governing system model

Small signal model of turbine
2.3 Generator Load Model
The incremental power input to the system can fractionated towards stored kinetic energy in the generator being proportional to square of the frequency and load changes of sensitive loads due to frequency deviations. These two events have been modelled and derived the transfer function of generator load model as depicted in the following Eq. (4) and (5) below. The inertia constant is designated as H and its typical value is about 2 to 10 s, hence the power system time constant i.e. Tps lies in the range of 4 to 20 s. The following equations illustrate expressions for Tps and Kps in terms of inertia constant (H) and load damping factor (D) [5,6,7,8,9,10,11,12] (Fig. 3).

Generator load model
The model of LFC as illustrated in Fig. 4, LFC with PI Controller is illustrated by the Figs. 5 and 6 shows the Single Area Load Frequency Control with Fuzzy Controller [4,5,6,7,8,9,10,11,12].

LFC without Controller

LFC with PI Controller

LFC with Fuzzy Controller
3 Single Area Power System
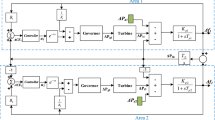
Power Systems can be sub divided into number of areas through tie lines, without out loss of generality, consider a simple two area power system with a single tie line as depicted by Fig. 7 as shown below. The power transfer of the tie line is P12 is given in Eq. (10), the synchronizing torque coefficient T12 as illustrated in Eq. (11), subsequently expressions have been derived for Area Control Error (ACE1 and ACE2) in terms of P12 and P21, bias factors B1 and B2 respectively as shown in equations from (12) to (15). Figure 8 illustrates the Block diagram model of Fuzzy controller based two area power system, with fuzzy based controller in each of the areas respectively [1,2,3,4,5,6,7,8] (Figs. 9 and 10).

Two area power system with tie line

Block diagram model of Fuzzy controller based two area power system

Three Area Power System with tie lines

Block diagram model of Fuzzy controller based multi area power system showing only one area signals
3.1 Tie Line Bias Control of Multi Area Power Systems
Each of the control area is connected with as many areas as possible in interconnected systems, with tie lines. Consider one area in the interconnected system, the net interchange with other control areas equal to the sum of tie line powers through outgoing tie lines and is given by the following equation below Eq. (16) similarly other area controllers can be obtained.
4 Power System Stability
Power system stability is defined as a system ability to regain its initial equilibrium state after being subjected to a disturbance and its classification are given in Fig. 11.

Power system stability stratification

Power angle curve
4.1 Rotor Angle Stability
The system should remain in synchronism even after being subjected to the disturbance, which involves output power oscillates reflected in rotor oscillations.
4.2 Rotor Angle Stability
Relation between the power and angular position of a rotor in synchronous machine is nonlinear relation, when the synchronous generator is feeding a synchronous motor through transmission line. The power transferred to the motor from the generator is depends on the function of angular displacement between rotors of the generator and motor this is because of Motor internal angle, generator internal angle, and the angular displacement between motor and generator terminal voltage and power flow is given by the Eq. 17.
This equation say that the power transferred to a motor from generator is maximum when the angle is 90°, if the angle is further increased beyond 90°, power transferred starts decreasing is shown in Fig. 12. The maximum power transferred is directly proportional to machine internal voltage [8,9,10,11,12].
4.3 Dynamic Stability
Whenever the synchronous machine is subjected to small and medium load perturbations then the machine is subjected to rotor oscillations. These oscillations will die out very soon due to damping provided in the machine or external damping provided by the controller or compensator. The swing curves of the machine will illustrate the dynamic instability mechanism of the machine for such disturbances as illustrated in the below Fig. 13(a) and (b). The Fig. 13(a) depicts that the system is stable for small and medium disturbances with quiet effective damping and is unstable for medium disturbances with insufficient damping.
4.4 Transient Stability
Whenever the synchronous machine is subjected to medium and large load variations or contingencies then the machine is subjected to wide rotor oscillations. These oscillations will die out very soon due to damping provided in the machine or external damping provided by the controller or compensator. The swing curves of the machine will illustrate the transient instability mechanism of the machine for such disturbances as illustrated in the below Fig. 13(a) and (c). The Fig. 13(a) depicts that the system is stable for medium disturbances with suitable controller and is unstable for large disturbances without any controller [1,2,3,4,5,6,7,8,9,10,11,12].

Power system stability swing curves (a) Stable System (b) Oscillatory Unstable System or dynamic instability and (c) Non-oscillatory Instability or Transient Instability
5 Fuzzy Logic Control
Fuzzy control is used when vaguness in the decission making is present or when non linearities are involved in the system dynamics. Figure 14 shows Mamdani Rule based Fuzzy Logic Controller input and output functional relationship in simulink model and Fig. 15 3-d surface of the Fuzzy rules. The Table 1 shows the Fuzzy rules table for the single and two area power systems. There are two input membership functions of Fuzzy logic controller, one is error i.e. the reference voltage minus actual voltage of seven input triangular membership functions varying range of + or −16%. The second is derivative of error seven input triangular membership functions varying range of + or −16% as depicted in Fig. 14 and seven output triangular membership functions varying range of + or −18%. The Fuzzy rules [6,7,8,9,10,11,12].
Table 1 shows the 49 rules framed with input1 variables viz. nb1, nm1, ns1, zo1, ps1, pm1 and pb1, similarly input2 variables viz. nb2, nm2, ns2, zo2, ps2, pm2 and pb2 and output variables viz. nb, nm, ns, zo, ps, pm and pb [4,5,6,7,8,9,10,11].

Triangular input and output membership functions of fuzzy controller

Fuzzy 3-D rule surface
6 Case Study and Simulation Results
The single area and two area power system Simulink models have been derived from the small signal transfer function models of both areas. Both of these areas have been simulated for three cases, one is without controller, second is with PI controller and third is with Fuzzy logic based controller. In subsequent part of the article single area system has been presented and succeeding part describes the simulation results of two area system.
6.1 Simulation Results of Three Area Power System
The Simulink models have been developed for three area power system for all three cases, case I (a): without any controller as depicted by the Fig. 16, case I (b): Three area system with PI Controller as shown in Fig. 17 and case I (c): Single area system with Fuzzy Controller as illustrated in Fig. 18.

Three area system Simulink model without Controller

Three area system Simulink model with PI Controller

Three area system with Fuzzy Controller
Case I: 5% disturbance results of three area system
Area1 frequency deviations with 5% disturbance
In Case I results have been presented with 5% disturbance only with sub cases of Case I-1 for area1, Case I-2 for area2 and Case I-3 for area3 respectively. Case I-(a) Area 1 without controller error is −15% which is not acceptable and unstable, Case I-(b) with PI Controller the peak undershoot is −22% and settling time of 25 s and Case I-(c) with fuzzy controller the peak undershoot is −12.5% and settling time of 14 s with zero steady state error which is most accepted one among all systems as illustrated by the below Fig. 19.

Area1 frequency deviations with 5% disturbance
Case I-2 (a) Without controller error is −19% which is not acceptable and unstable, Case I-3 (a) with PI Controller the peak undershoot is −29% and settling time of 25 s and Case I-3 (a) with fuzzy controller the peak undershoot is −18% and settling time of 14 s with zero steady state error as depicted by Fig. 20 below.

Area2 frequency deviations with 5% disturbance
Case I-(a) without controller error is −22% which is not acceptable and unstable, Case I-3 (b) with PI Controller the peak undershoot is −43% and settling time of 25 s and Case I-3 (c) with fuzzy controller the peak undershoot is −23% and settling time of 14 s with zero steady state error and Fig. 21 shows the Area3 frequency deviations with 5% disturbance.

Area3 frequency deviations with 5% disturbance
Case I-4 the power and delta deviation without controller it is unstable and with controllers the system is stable for small load disturbances in Area1 and the deviation is very small for fuzzy controller as depicted in Figs. 22 and 23 below.
Case II: 10% disturbance results of three area system
Case II-1 (a) without controller error is −29% which is not acceptable and unstable, Case II-1 (b) with PI Controller the peak undershoot is −49% and settling time of 15 s and Case II-1 (c) with fuzzy controller the peak undershoot is −11.5% and settling time of 6 s with zero steady state error as illustrated in the below Fig. 24.

Tie line Power in area1 without, with PI and with Fuzzy Controllers

Area1 deviation in delta1, delta2 and delta3 without, with PI and with Fuzzy Controllers

Area1 frequency deviations with 10% disturbance
Case II-1 (a) Without controller error is −39% which is not acceptable and unstable, Case II-2 (b) with PI Controller the peak undershoot is −64% and settling time of 16 s and Case II-2 (c) with fuzzy controller the peak undershoot is −11.5% and settling time of 12 s with zero steady state error as Fig. 25 depicts Area2 frequency deviations with 10% disturbance.

Area2 frequency deviations with 10% disturbance
Case II-3 (a) Without controller error is −49% which is not acceptable and unstable, Case II-3 (b) with PI Controller the peak undershoot is −83% and settling time of 16 s and Case II-3 (c) with fuzzy controller the peak undershoot is −40% and settling time of 12 s with zero steady state error as Fig. 26 shows Area3 frequency deviations with 10% disturbance.

Area3 frequency deviations with 10% disturbance
Case II-(d) the power and delta deviation without controller it is unstable and with controllers the system is stable for small load disturbances in Area1 and the deviation is very small for fuzzy controller as depicted in Figs. 27 and 28 respectively.

Tie line Power in area2 without, with PI and with Fuzzy Controllers

Area2 deviation in delta4, delta5 and delta6 without, with PI and with Fuzzy Controllers, without controller it is unstable and with controllers the system is stable for small load disturbances in Area2
Case III: 30% disturbance results of three area system
Transient Stability Analysis
Case III-1 (a) Without controller error is −88% which is not acceptable and unstable, Case III-1 (b) with PI Controller the peak undershoot is −130% and settling time of 25 s and Case III-1 (c) with fuzzy controller the peak undershoot is −29% and settling time of 5 s with 15% steady state error as Fig. 29 depicts Area1 frequency deviations with 30% disturbance.

Area1 frequency deviations with 30% disturbance
Case III-2 (a) Without controller error is −148% which is not acceptable and unstable, Case III-3 (b) with PI Controller the peak undershoot is −252% and settling time of 23 s and Case III-3 (c) with fuzzy controller the peak undershoot is −15% and settling time of 5.7 s with a small acceptable steady state error as Figs. 30 and 31 illustrates Area2 and Area3 frequency deviations with 30% disturbance respectively.

Area2 frequency deviations with 30% disturbance

Area3 frequency deviations with 30% disturbance
Case III-4 the power and delta deviation without controller it is unstable and with controllers the system is stable for small load disturbances in Area1 and the deviation is very small for fuzzy controller as depicted in Figs. 32 and 33 respectively.

Tie line Power in area3 without, with PI and with Fuzzy Controllers

Area3 deviation in delta4, delta5 and delta6 without, with PI and with Fuzzy Controllers
7 Conclusions
The article entente the three area load frequency control and dynamic and transient stability analysis. It dispenses the simulation of three area systems with small, medium and large load disturbances, with three cases. Case I with 5% load disturbances, Case II with 10% and case III with 30% load disturbances. In each of the three cases, there are three sub cases (a), (b) and (c) sub case (a) without any controller, sub case (b) with PI controller and sub case (c) with Fuzzy Controllers. For all three cases.
The simulation is carried out for all three cases of three area power system with all three sub cases of (a), (b) and (c). In the first part of the case study, the simulation results of three area power system for all three cases have been presented.
The frequency deviation for the three area system for all three cases shows that the system is working well with less settling time and zero steady state error, when it concerned with PI controller, the response is showing that the steady state error is there but still it growing and is not completely accepted as far as performance is concerned and without any controller the system performance is not accepted and it is unstable.
In the second part, the simulation results of three area power system for last part of all three cases have been presented. The power and swing curves being illustrated that for small, medium and also for large disturbances the system is completely stable with fuzzy logic controller and where as it is not accepted with PI controller and completely unstable without controller.
References
Yarlagadda, V., Ambati, G.P., Prasad, E.S., Veeresham, K., Radhika, G.: Synchronous and voltage stability improvement using SVC and TCSC and its coordination control. Des. Eng. 2021(6), 3624–3635 (2021). ISSN 0011-9342
Yarlagadda, V., Ravi Kumar, D., Shiva Prasad, E., Ambati, G.P., Gadupudi, L.: Prototype models of FACTS controllers and its optimal sizing and placements in large scale power systems using voltage stability indices. Des. Eng. 2021(6), 3636–3659 (2021). ISSN 0011-9342
Yarlagadda, V., Turaka, N., Ambati, G.P., Poornima, S.: Optimization of voltage stability based shunt and series compensation using PSO. Des. Eng. 2021(7), 8679–8694 (2021)
Nayak, J.R., Pati, T.K., Sahu, B.K., Kar, S.K.: Fuzzy-PID controller optimized TLBO algorithm on automatic generation control of a two-area interconnected power system. In: 2015 International Conference on Circuits, Power and Computing Technologies [ICCPCT-2015], pp. 1–4 (2015). https://doi.org/10.1109/ICCPCT.2015.7159427
Doley, R., Ghosh, S.: Application of PID and fuzzy based controllers for load frequency control of a single – area and double – area power systems. In: 2019 5th International Conference on Advances in Electrical Engineering (ICAEE), pp. 479–484 (2019). https://doi.org/10.1109/ICAEE48663.2019.8975568
Pati, T.K., Nayak, J.R., Sahu, B.K.: Application of TLBO algorithm to study the performance of automatic generation control of a two-area multi-units interconnected power system. In: 2015 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), pp. 1–5 (2015). https://doi.org/10.1109/SPICES.2015.7091560
Garg, C., Namdeo, A., Singhal, A., Singh, P., Shaw, R.N., Ghosh, A.: Adaptive fuzzy logic models for the prediction of compressive strength of sustainable concrete. In: Bianchini, M., Piuri, V., Das, S., Shaw, R.N. (eds.) Advanced Computing and Intelligent Technologies. LNNS, vol. 218, pp. 593–605. Springer, Singapore (2022). https://doi.org/10.1007/978-981-16-2164-2_47
Mitra, P., Chowdhury, S., Chowdhury, S.P., Pal, S.K., Song, Y.H., Taylor, G.A.: Performance of a fuzzy logic based automatic voltage regulator in single and multi-machine environment. In: Proceedings of the 41st International Universities Power Engineering Conference, pp. 1082–1086 (2006). https://doi.org/10.1109/UPEC.2006.367644
El Yakine Kouba, N., Menaa, M., Hasni, M., Boudour, M.: Optimal load frequency control based on artificial bee colony optimization applied to single, two and multi-area interconnected power systems. In: 2015 3rd International Conference on Control, Engineering & Information Technology (CEIT), pp. 1–6 (2015). https://doi.org/10.1109/CEIT.2015.7233027
Sonker, B., Kumar, D., Samuel, P.: Differential evolution based TDF-IMC scheme for load frequency control of single-area power systems. In: TENCON 2019 - 2019 IEEE Region 10 Conference (TENCON), pp. 1416–1420 (2019). https://doi.org/10.1109/TENCON.2019.8929572
Nakayama, K., Fujita, G., Yokoyama, R.: Load frequency control for utility interaction of wide-area power system interconnection. In: 2009 Transmission & Distribution Conference & Exposition: Asia and Pacific, pp. 1–4 (2009). https://doi.org/10.1109/TD-ASIA.2009.5356942
Udhayashankar, C., Thottungal, R., Yuvaraj, M.: Transient stability improvement in transmission system using SVC with fuzzy logic control. In: 2014 International Conference on Advances in Electrical Engineering (ICAEE), pp. 1–4 (2014). https://doi.org/10.1109/ICAEE.2014.6838505
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Yarlagadda, V., Kapoor, R., Kumar, C.S., Ambati, G. (2022). Dynamic and Transient Stability Enhancement of Multi Area Power Systems Using Fuzzy Logic Control Against Load Disturbances. In: Mekhilef, S., Shaw, R.N., Siano, P. (eds) Innovations in Electrical and Electronic Engineering. ICEEE 2022. Lecture Notes in Electrical Engineering, vol 893. Springer, Singapore. https://doi.org/10.1007/978-981-19-1742-4_2
Download citation
DOI: https://doi.org/10.1007/978-981-19-1742-4_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1741-7
Online ISBN: 978-981-19-1742-4
eBook Packages: EnergyEnergy (R0)