
Abstract
This paper presents the results of an investigation and analysis of the effects of broken squirrel-cage bars. In the investigation, a comprehensive time-stepping coupled finite element approach was fully used to compute stator current waveforms, torque, and magnetic flux density waveform. The harmonic component of air-gap flux density is analysed. From these data, the faulty signatures are extracted. The present method has been designed and implemented using Finite Elements Method depending on time stepping. The proposed method produces an efficient technique in terms of time and accuracy to detect the faults and effects on the operation of electric machine. The early detection of faults in electric machine gives enough time to decrease the probability of electric machine faults. The differences in motor torque waveform timing in each case associated with the stator current waveforms give the flux spreading in the suggested technique. The obtained results show fast fault detection and technique is founded to extract the induction motors faults.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
Modern industrial of “induction motors” are frozen used drive-in manufacturing with several methods. The investigation of motor product has been considered as optimality in the usage. Such type of motor faces many problems in general manufacturing area which considers unwanted phenomena due to motor period time reduction. Hence, the motor rating power monitoring decreases the probability of motor loss life. So, the requirements of “faults diagnosis” in this type of motor could be achieved by many advanced techniques [1]. Then, the harmonic current and other many parameters in the motor stator will affect the motor efficiency due to its increasing and decreasing compared with standard values [2]. Any of these parameters could be used as useful signs of faulty motor “diagnosis” of induction motors. The finding of these catalogues in many ways could suggest solving this problem [3]. The potential magnetic aberration parameters and the spreading of flux are used to overcome many faults in the broken bars of motors [4]. A problem is protecting the motor device indoors from the “air gap” which affect the incoming signals from motor. To sense the rotor bar faults, the turning radius techniques could be used [5, 6]. Consequently, this technique needs more additional devices. Many researchers introduce advanced methods to diagnose the motor faults as in [7,8,9]. One of the more attractive methods in these fields is the consideration of harmonic produced by stator current as in [10, 11]. The investigated method of [12] which used the “inverted fed induction motors” caused an unwanted frequency harmonic. The idea by [13, 14] of in hand fault motor using frequency spectrum illustrates peak power of spectrum and pole number in the motor consideration. The opera-2d programme technique is carried out to sign the faults by means of broken bar rotor routine. The specifications of suggested motor are illustrated in Table 1.
2 Mechanical Fault Concept
The common things affected on rotor could be simplified and explained briefly in the healthy bars, which are forced to carry high current and high-speed torques. Additionally, the large air in “aluminium” causes uniform bars to expand. The static and dynamic rotor symmetry could affect rubbing the stator winding.
3 Mathematical Model
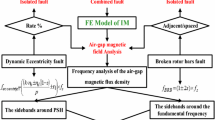
The most techniques used to model the fault diagnosis and investigate the induction motor damages are the “winding function, equivalent circuit and finite element methods”. The high performance of electromagnet symmetrical in the induction motor could be used in the suggested model, which indicates any asymmetry degree sign as illustrated in Fig. 1.

Allocation structure
An asymmetrical of electromagnetic field in the motor produces inequalities in the phase resistance as well as in the air-gap electromagnetic field which introduces a harmonic frequency in the current of stator and rotor. This phenomenon could be expressed in the mathematical model which adds extra resistance to phase of rotor as in [15].
where \(\Delta r_{ra,b,c}\) phase change of rotor resistance.
The change produced by rotor effects \(\left( {\Delta r_{ra,b,c} } \right)\) is created by rotor effects which are derived depending on the statement of broken bar as touching either resistance of ring end or magnetizing current. A corresponding resistance of healthy machine could write as:
where
rb and re denote the end-ring resistances and rotor bar,
Ns turns of winding.
To simplify Eq. (2), assume re deserted, then Eq. (2) become:
and
Hence
The 2nd measurable fault assessment as suggested by [16,17,18,19,20,21] is:
which Ibb and I are amplitudes of the sideband frequency \(\alpha\) …… electrical angle.
Therefore, the electrical angle could be expressed as:
4 Tests and Results
The finite element method approach is used to diagnose the effect of broken bars in three-phase induction motor which achieves computing healthy and faulty cases and collects the data as waveforms for magnetic field and air-gap flux. This data could extract different fault type signs without destroying the motor. The programme of opera-2d is used in this work to observe and detect the faults and provide good proof of suggested approach. The plots of rated motor in the case of asymmetrical and symmetrical rotor condition are presented. Hence, a flux density of healthy motors shows a bit unbalance due to rotating field introduced by faulty motor as shown in Fig. 2.

Waveform of flux
Figure 3 illustrated a current through stator in faulty and healthy state under load condition. The stator current increased suggestively associated with a fine rotor because the component of harmonic which caused by faults is superimposed into stator current winding at the frequency fb. Concentrating faults on one pole produce an increase in the value of harmonic mechanisms because the faults cause irregularity of flux spreading, that produce more harmonics. Faults generate amount of frequencies with the rotating flux waveform. The rotating flux waves could encourage currents in equal frequency with the stator current.

Variation of current
The difference between two stator amplitudes is due to fault case because of asymmetrical flux distribution case, more harmonic in the faulty motor performance. Hence, increasing the number of broken bars would introduce bad asymmetrical in flux. High rise in the frequency harmonic will appear in the case of increasing the amplitude of harmonic of flux waveforms. As a result, one could observe that the harmonic in the faulty motor appears more asymmetrical compared with healthy motor. Figure 4 illustrates the air-gap harmonic spectrum in healthy and faulty machine and the difference between them is highlighted as well.

Harmonic spectrums
In the faulty machine, the waves of magnetic torque are more compared with healthy motor. The time variation of the torque in the healthy and faulty more is illustrated in Fig. 5. The oscillation of developed torque is increased in case of faulty motor more than traditionally enveloped in the healthy motor as well more values. The time variation of torque shape in faulty motor is seen more than in healthy one and the ripple is high also.

Variation of torque
5 Conclusion
This paper presents the detection of mechanical faults in induction motor by using the opera-2d programme techniques. This approach will increase the time life and keep the motor efficiency as top as possible. The early detection of the faults in the motor will give enough time to protect the machine and decrease the cost by many phases of running time. The suggested technique provides and enhances the machine researcher to develop the fault detection in the current and future generations of induction motor. This work opens a new window for developing and accelerating the induction motor design process to get efficient motor. The future direction of this study aims to develop a comprehensive database of non-invasive sensor measurements of induction machines with different faults and to understand the effect of faults on each sensor output.
References
Nandi S, Bharadwaj R, Tolivat HA, Parlos AG. Study of three phase induction motors with in cipient rotor cage faults under different supply conditions. In: Proceedings of the IEEE-IAS 1999 annual meeting, vol 3
Faiz J, Ebrahimi BM, Sharifian MBB (2006) Different faults and their diagnosis techniques in three phase squirrel-cage induction motors—a review. J Electromag 26
Paoletti GL, Rose A (1989) Improving existing motor protection for medium voltage motors. IEEE Trans Ind Appl 25(3)
Fiser R (2001) Application of a finite element method to predict damage induction motor performance. IEEE Trans Magn 37(5)
Povinelli RJ, Bangura JF, Demerdash NAO, Brown RH (2002) Diagnostics of bar and end-ring connector breakage faults in poly phase induction motors through a novel dual track of time-series data mining and time-stepping coupled FE—state space modelling. IEEE Trans Energy Convers 17(1)
Bangura JF, Povinelli RJ, Demerdash NAO, Brown RH (2003) Diagnostics of eccentricities and bar/end-ring connector breakages in poly phase induction motors through a combination of time series data mining and time-stepping coupled FE—state space techniques industry applications. IEEE Trans Ind Appl 39(4)
Faiz J, Ebrahimi BM, Sharifian MBB (2007) Time stepping finite element analysis of rotor broken bars fault in a three-phase squirrel-cage induction motor. Progr Electromag Res PIER 68
Mirafzal B, Demerdash NAO (2005) Effects of load magnitude on diagnosis broken bar faults in induction motors using the pendulous oscillation of the rotor magnetic field orientation. IEEE Trans Ind Appl 41(3)
Ondel O, Boutleux E, Clerc G (2006) A method to detect broken bars in induction machine pattern recognition techniques. IEEE Trans Ind Appl 42(4)
Haji M, Toliyat HA (2001) Pattern recognition—a technique for induction machines rotor broken bar detection. IEEE Trans Energy Convers 16(4)
Bangura JF, Demerdash NA (1999) Diagnosis and characterization of effects of broken bars and connectors in squirrel-cage induction motors by a time-stepping coupled finite element—state space modeling approach. IEEE Trans Energy Convers 14(4)
Innes AG, Langman RA (1994) The detection of broken rotor bars in variable speed induction motor drives. ICEM94
Legowski SF, Trzynadlowski AM (1995) Instantaneous stator power as a medium for the signature analysis of induction motors. IEEE IAS 95
Trzynadlowski AM, Ghasezadeh M, Legowski SF (1997) Diagnostics of mechanical abnormalities in induction motors using instantaneous electric power. IEEE, MBI 9.1–9.3
Bentounsi A, Nicolas A (1998) On line diagnosis of defaults on squirrel cage motor using FEM. IEEE Trans Magn 34(3):3511–3514
Theodore wildi (2000) Electrical machines, drives, and power systems, fourth systems, Tk2182. W53
Stephen J. Chapman British aerospace Australia, electric machinery fundamentals, 3rd edn. MCGRAW-HILL
Tata McGraw-Hill. Electric machines, 3rd edn. Publishing company limited (New Delhi), 3rd reprint 2005 RYLQCRABRCAQZ
Pyrhonen J, Jokinen T, Hrabovcova V (2009) Design of rotating electrical machines, Ltd. Wiley, TK2331, p 97
Workshop in Design and modeling of electrical machine, school of electrical and electronic engineering USM engineering campus March–2009 By Engr. DR. Dahaman Isahak
Regin R, Obaid AJ, Alenezi A, Arslan F, Gupta AK, Kadhim KH (2021) Node replacement based energy optimization using enhanced salp swarm algorithm (Es2a) in wireless sensor networks. J Eng Sci Technol 16(3):2487–2501
Ho SC, Hong CG, Hwang GJ (1989) Transient and steady state performance of a squirrel-cage induction motor. IEEE Proc Part B 136(3)
Fišer R, Makuc D, Ambrožič V. Evaluation of the induction motor cage fault stage using finite element method. Record of IEEE SDEMPED’2001. The 2001 IEEE international symposium on diagnostics for electrical machines, power electronics and drives, Grado (Italy), pp 627–631
Charles I, Hubert PE (2002) Prentice hall, electric machines, theory, operation, applications, adjustment, and control, 2nd edn. TK2182. H83
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2023 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Khaleel, H.H., Ibrahim, A.A., Hammadi, K.J. (2023). Behavioural Investigation and Analysis of Flux and Torque in Faulty Electrical Machines Using Finite Element Techniques. In: Kumar, R., Pattnaik, P.K., R. S. Tavares, J.M. (eds) Next Generation of Internet of Things. Lecture Notes in Networks and Systems, vol 445. Springer, Singapore. https://doi.org/10.1007/978-981-19-1412-6_2
Download citation
DOI: https://doi.org/10.1007/978-981-19-1412-6_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-1411-9
Online ISBN: 978-981-19-1412-6
eBook Packages: EngineeringEngineering (R0)