
Abstract
PID (proportional–integral–derivative) control is the quicker control approaches. It has an uncomplicated control arrangement which was grasped by plant engineers and which they got comparatively manageable to tune. As various control processes employing PID have confirmed adequate, it still has a broad range of applications in automated control. Meanwhile, various researchers in the area of process control system observed that the design of PID controller is very tedious if the plant is highly nonlinear. Controller synthesis is a very difficult task for an unstable system because there are closed-loop performance and specific configuration constraints that range and narrow available solutions. These restrictions reveal peaks in sensitivity functions, overshoots, and overall system bandwidth. Selection of PID control design approach and arrangement is based on considerably a previous theory of the plant demands and process dynamics. The two most common conventional PID tuning procedures were the frequency response (cycling) and time response (reaction curve) experiment followed by proportional control. This chapter mainly focuses on the design and analysis of PID tuning for an unstable system. A related investigation of conventional (Pessen integral rule) and real-time online tuning techniques is also represented based on individual simulation examinations. The study confirms the effectiveness of suitable tuning techniques to regulate the unstable system for getting the desired performance.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
22.1 Introduction
Real-world systems are naturally unstable when analyzed over the broad functioning range while various of the systems are supposed to “act” as linear in the environment of the specific operating condition at moderate speeds under particular consideration (Albertos et al. 1997; Zarei 2020; Precup et al. 2020; Priyanka et al. 2020; Boonpramuk et al. 2019; Fiser and Zítek 2019). Numerous physical process systems are denoted by nonlinear models. Examples incorporate drag on a vehicle in movement, chemical reactor, coulomb friction, robotic manipulator, electrostatic and gravitational attraction, electrical or electronics characteristics, etc. Recently, many researchers from such abovementioned broad area have revealed an intense concern in the modeling and examination of nonlinear control strategies. However, the main challenges force constantly striking into nonlinearities (Iqbal and Ullah 2017). Main causes behind the increasing concern in nonlinear control cover are investigations of strong nonlinearities, advancement of linear control systems, and requirement of dealing with model changes and design simplicity. PID controller is broadly employed in several industrial applications due to its simple design and structure. However, it is a challenge to obtain the desired control performance in the appearance of time delays, anonymous nonlinearities, disturbances as well as variation in system parameters. In this era, several control techniques have been invented for the industrial application. Though PID controller appeared as the simplest and usually accepted classical controller (Goud and Swarnkar 2019a, 2018; Rajesh and Dash 2019; Khan et al. 2019; Gaidhane et al. 2019; Salman and Jafar 2019; Khanduja et al. 2019). PID control tuning is the mathematical and practical procedure for obtaining the optimized value of controller parameters. Conventional controller tuning provides reliable and adequate action for linear time-invariant systems (Dubey et al. 2021; Goud et al. 2021; Swarnkar and Goud 2021; Ekinci and Hekimoglu 2019; Goud and Swarnkar 2019b).
Though, as the process is conducted in the limit enough nearly to a given set point, it cannot guarantee to perform well with fluctuations in set points or environmental conditions. Controller using online tuning for nonlinear systems should adjust variations in the variable and transfer them to control technique such that the performance of the control system is not degraded in spite of variations in the environment changes (Erol 2021; Feng et al. 2021; Jayaswal et al. 2021; Ghosh et al. 2021; Goud and Swarnkar 2019c; Swarnkar and Goud 2020; Noordin et al. 2021; Guo et al. 2021; Pongfai et al. 2021; Gopi and Reddy 2015).
In this investigation, an attempt is made to carry out a comparative analysis of offline and online PID tuning techniques for the unstable system. Pure unstable modes normally occur in the system such as an inverted pendulum system and flight system. Both classical and advanced online PID tuning methods are employed on unstable system to obtain satisfactory performance. The rest of this book chapter is ordered as follows: Sect. 22.2 illustrates the unstable system model. Section 22.3 explains the classical control action. Section 22.4 summarizes classical modes of PID tuning. Section 22.4 describes the online controller tuning for unstable system. Eventually, a short conclusion is discussed in Sect. 22.5.
22.2 Unstable System Model
Controller design of unstable systems could be tried applying many of the techniques suitable to the usual stable system but the outcomes may not be adequate. Controller design for stable system is based on various linear opinions when applied to unstable system practically may fail. This situation, accordingly, requires the sensible and accurate design of the controller. The system, which is now used for the investigation of controllers, is the third-order unstable system with feedforward transfer function shown in Eq. (22.1) (Swarnkar and Goud 2021, 2020).
and feedback transfer function H(s) = 1.
The step response of the plant without any controller is exhibited in Fig. 22.1.

It can be remarked that oscillations of the system are rising with time and becoming the system unstable. In an unstable system, the amount of overshoot is closely related to rise time. Unexpectedly, the higher the rise times more the overshoots, which is opposed to the cause of stable plants. Bode plot is given for the loop transfer function in Fig. 22.2. The gain crossover frequency (ωg) is calculated as 200 rad/sec whereas the phase crossover frequency (ωp) is calculated as 100 rad/sec. The phase and gain margins measured by the plot are −37° and −13.9 dB, respectively. A negative sign of margins reveals the instability of the system. To check the stability range with respect to feedforward gain of the system, the root locus plot is also shown in Fig. 22.3. This plot shows very small stability range for the plant under consideration. System becomes marginally stable for feedforward gain of 0.2 only, and beyond this system becomes unstable.


The traditional and advanced online control techniques are now used to examine their applicability and usefulness for such uncontrolled plant (Swarnkar and Goud 2021, 2020).
22.3 Classical Control Action
All standard design control methods are beneficial for PID controllers. Some novel approaches are also revealed to evaluate parameters for PID controllers and these approaches are often called tuning techniques. The most popular offline tuning methods are invented by Ziegler–Nichols (ZN). By using proper tuning techniques, errors can be overcome and output can move toward given desired value. In some circumstances, where the system has a notable amount of instability, the traditional tuning techniques are unsuccessful to give an excellent solution. A schematic diagram of PID control operation is revealed in Fig. 22.4.

In conventional control, once these parameters are decided then they remain fixed throughout the process irrespective of the variations in the system. In PID controller, the control signal generated by the controller is defined by Eq. (22.2).
The transfer function of PID controller is defined in Eq. (22.3).
where \({\mathrm{K}}_{\mathrm{p}}\) is the proportional controller parameter, \({\mathrm{K}}_{\mathrm{i}}\) is the integral controller parameter, and \({\mathrm{K}}_{\mathrm{d}}\) is the derivative controller parameter, e(t) is the error signal, and u(t) is the control signal. These gains fix the role of each individual controller in the process. Correct choice of these gains is actually the base for the perfect controlling (Albertos et al. 1997; Fiser and Zítek 2019; Goud and Swarnkar 2019b). For the nonlinear system, the measurement of these parameters is a challenging assignment. This book chapter highlights the importance of classical and advanced (online) tuning techniques. As these techniques calculate the values of Kp, Ki, and Kd based on their previous values, the next section describes the mathematical model of its execution.
22.3.1 Classical PID Tuning
A traditional tuning method for PID controller was invented by ZN known as Pessen Integral Rule (PIR). The procedure for tuning PID gains using PIR is similar to the procedure of ZN PID tuning. Traditional techniques are offline methods, once the controller gains are set cannot be adjusted during the process which can be overcome by using smart or online techniques.
The steps for getting controller gains using PIR are as follows:
-
Put \(K_d = 0\) and \(K_i = 0\), system is proportional.
-
Take the characteristic equation and by using Routh criteria find the value of \(K_p = K_u\).
-
Using characteristic equation and Routh criteria find the value of Tu.
-
Find out the values of controller gains using Table 22.1 (Pongfai et al. 2021).
Table 22.1 PID tuning using Pessen integral rule (PIR) (Pongfai et al. 2021)
22.3.2 System Response with Classical PID Tuning
The time response characteristic of the unstable system controlled with PIR technique is shown in Fig. 22.5. Remarkable improvement in system characteristic can be examined with the use of PID controller. The performance of the unstable system is examined in terms of rise time, peak time, settling time, and overshoot. By using the PIR-PID tuning approach highest overshoot is reduced to 56.9987% and settling time to 0.1357 s. which is comparatively better than unstable system. Table 22.3 shows the values of the PID controller parameters obtained by various tuning techniques. Figure 22.6 shows the Bode plot of system with PIR technique in which calculated values of phase margin and gain margin are positive that shows system is stable and that parameters are summarized in Table 22.2.

Time response characteristic of third-order unstable system using PIR tuning technique

Bode plot for third-order unstable system using PIR tuning technique
22.4 Online Controller Tuning for Unstable System
The offline conventional method has improved the performance of the system under consideration which can be further improved by advanced online tuning techniques. This section presents the controlling of unstable system using advanced online tuning methods and “SISOTOOL” in the Control System Toolbox, PID tuner block, and signal constraint box. Finally, results will be compared for all tuning methods.
22.4.1 Controller Design with SISOTOOL:
“SISOTOOL” is one of the advanced features in the Control System Toolbox in MATLAB that facilitates software-based controller configuration for single-input single-output (SISO) systems. A typical design workflow with the SISOTOOL involves the following steps:
-
Run the transfer function of an inherently unstable system in the editor or command window of MATLAB.
-
Type “SISOTOOL” at the command prompt.
-
A new window SISO design task is open.
-
Import the system model (transfer function) of an inherently unstable system.
-
Design controllers using Linear–Quadratic–Gaussian (LQG) synthesis design method in automated tuning and update compensator.
-
Now Eq. (22.4) of compensator is found.
Now click on show analysis plot and investigate control system designs using frequency-domain responses and time domain such as step response (Fig. 22.7) and bode plot (Fig. 22.8). Time response characteristic reveals the remarkable change in performance with the higher overshoot as decrease as 46.2%. In Bode plot the gain and phase margins calculated by the graph are positive which indicate the stability of the system. Observations by Bode plot are summarized in Table 22.2, where the results are compared with conventional tuning method also.

Time response graph with tuned LQG synthesis tuning technique

Bode plot with tuned LQG synthesis tuning technique
22.4.2 PID Tuning with Signal Constraint Box
In this method of online tuning, the desired output characteristic is defined in advance and controller is tuned for obtaining this characteristic. Following steps are adopted for performing tuning using signal constraint box in MATLAB.
-
Open PID controller box and assign the controller gains in the form of variables only, i.e., Kp, Ki, Kd.
-
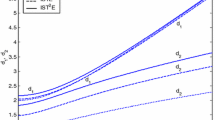
Open signal constraint box and set the limits of output waveform as shown in Fig. 22.9.
Fig. 22.9 
Time response characteristics for different sets of controller gains
-
Go to optimization block then Tuned parameters and add the variables one by one.
-
Assign the initial guess to each variable.
-
Run the system and start the optimization.

The system performance is checked for different set of controller gains. After iteration the best possible set of controller gain is chosen for getting the desired performance of the system. Figure 22.9 shows the number of iterations with the time response characteristics for different sets of controller gains. Finally, the feasible or optimal solution provided by this tuning within the specified tolerances defines the controller gains as shown in Table 22.3.The time response characteristic with this optimal set of controller gains is shown in Fig. 22.10. It is obvious from the characteristic that system becomes stable with reasonable specifications. The maximum overshoot is limited to 11.35% with settling time 0.225 s which shows the great improvement in performance as compared to conventional offline tuning method.

Time response characteristic for optimal values of controller gains
22.4.3 Controller Design with Online PID Tuner
PID tuner in MATLAB gives a quick and extensively used single-loop PID tuning approach for the Simulink. This technique is employed to tune controller parameters to obtain a strong PID controller design with the required reaction time. A common design step with the online tuner includes the subsequent steps:
-
Start the PID tuner.
-
When import, the MATLAB software calculates a model from the designs of Simulink model and primary controller.
-
Tune the parameters in the Graphical User Interfaces (GUIs), by manually fixing design rules in two design approaches.
-
The tuner calculates controller parameters that strongly sustain the system.
-
Export the parameters of the designed controller following the PID controller and validate controller performance in Simulink (Gopi and Reddy 2015).
After performing the tuning using PID tuner, controller gains are obtained as shown in Table 22.3.The time response characteristic of the given unstable system with this tuned PID controller is shown in Fig. 22.11. Characteristic shows the remarkable improvement in performance with maximum overshoot as low as 7.13%. This not only makes the system stable but making it convenient for all practical applications. Bode plot of such system is revealed in Fig. 22.12. Graph shows that the system is having both the margins positive with sufficient magnitudes.

Time response of unstable system with auto-tuned PID controller

Bode plot for the system tuned with online PID tuner
Unstable system is not only showing the bonded output but performance is also quite satisfactory with the adaptive schemes. The performance of the system based on time response specifications is summarized in Table 22.4 which shows the importance of suitable tuning of controller for obtaining the optimal performance of uncontrolled system. Performance of such conventional controllers can be used to understand complex behaviors of the system. PIR response yields higher overshoot which can be slightly overcome by using tuning using Control System Toolbox. The analysis of Control System Toolbox for the design of compensator used in LQG synthesis reveals that tuning technique used is robust toward uncertainty in system parameters and it can be strongly executed to any process industries.
22.5 Conclusion
Conventional PID controllers are suitable for performance improvement of stable system while controlling the unstable system which is the challenging job for controllers. If the calculated values of phase and gain margins are negative with large magnitudes for unstable systems, then the performance improvement of such system is not feasible for traditional rigid gain controllers. Tuning of PID controller is a tedious task for such an unbounded plant. With detailed simulation studies this work presents the design and implementation of traditional and advanced online tuned PID controller for controlling the highly unstable system. It is found that an unstable system is not only giving the bonded response but performance is also quite satisfactory with the suitable adaptive control. The performance of such traditional controllers can be employed to examine the complicated behavior of the system. PIR response produces a larger maximum overshoot which can be insignificantly reduced by applying LQG synthesis. The settling time (0.0379 s) and overshoot (46.2%) are under the prescribed limit with LQG synthesis tuning method. The performance of the unstable system is further enhanced with the employment of online advanced tuning techniques. The online PID tuning techniques exhibit that appropriate tuning procedure can not only drag one unstable system toward stability but can also improve its performance to large extent.
Abbreviations
- PIR :
-
Pessen Integral Rule
- PID :
-
Proportional–Integral–Derivative
- ZN :
-
Ziegler–Nichols
- LQG :
-
Linear–Quadratic–Gaussian
References
Albertos P, Strietzel R, Mort N (1997) Control engineering solution-a practical approach. The Institutions of Electrical Engineers, London, United Kingdom
Boonpramuk M, Tunyasirut S, Puangdownreong D (2019) Artificial intelligence-based optimal PID controller design for BLDC motor with phase advance. Indonesian J Electr Eng Informat (IJEEI) 28. https://doi.org/10.52549/ijeei.v7i4.1372
Dubey V, Goud H, Sharma P (2021) Comparative analysis of PID tuning techniques for blood glucose level of diabetic patient. Turk J Comput Math Educ (TURCOMAT) 12:2948–2953
Ekinci S, Hekimoglu B (2019) Improved kidney-inspired algorithm approach for tuning of PID controller in AVR system. IEEE Access 7:39935–39947. https://doi.org/10.1109/ACCESS.2019.2906980
Erol H (2021) Stability analysis of pitch angle control of large wind turbines with fractional order PID controller. Sustain Energy Grids Netw 26. https://doi.org/10.1016/j.segan.2021.100430
Feng H, Ma W, Yin C, Cao D (2021) Trajectory control of electro-hydraulic position servo system using improved PSO-PID controller. Autom Constr 127. https://doi.org/10.1016/j.autcon.2021.103722
Fiser J, Zítek P (2019) PID controller tuning via dominant pole placement in comparison with ziegler-nichols tuning. IFAC-Papers OnLine 1 2019. https://doi.org/10.1016/j.ifacol.2019.12.204
Gaidhane PJ, Nigam MJ, Kumar A, Pradhan PM (2019) Design of interval type-2 fuzzy precompensated PID controller applied to two-DOF robotic manipulator with variable payload. ISA Trans 1. https://doi.org/10.1016/j.isatra.2018.12.030
Ghosh S, Goud H, Swarnkar P, Deshpande DM (2021) Design of an optimized adaptive PID controller for induction motor drive. Mechatr Syst Control 49. https://doi.org/10.2316/J.2021.201-0197
Gopi P, Reddy PotlaLinga (2015) A robust decentralized controller design for interconnected power system with random load perturbations using SDO software. Proc Technol 21:406–414. https://doi.org/10.1016/j.protcy.2015.10.060
Goud H, Swarnkar P (2018) Signal synthesis model reference adaptive controller with artificial intelligent technique for a control of continuous stirred tank reactor. Int J Chem Reactor Eng 17. https://doi.org/10.1515/ijcre-2018-0145
Goud H, Swarnkar P (2019b) Signal synthesis model reference adaptive controller with genetic algorithm for a control of chemical tank reactor. Int J Chem Reactor Eng 17. https://doi.org/10.1515/ijcre-2018-0199
Goud H, Swarnkar P (2019c) Analysis and simulation of the continuous stirred tank reactor system using genetic algorithm. In: Harmony search and nature inspired optimization algorithms. Springer, Singapore. https://doi.org/10.1007/978-981-13-0761-4_106
Goud H, Sharma PC, Swarnkar P, Shankar VG, Sharma VP, Sahu AK (2021) A comparative analysis of conventional PID tuning techniques for single link robotic arm. Solid State Technol 64
Goud H, Swarnkar P (2019a) Investigations on metaheuristic algorithm for designing adaptive pid controller for continuous stirred tank reactor. Mapan 34:113–119. https://doi.org/10.1007/s12647-018-00300-w
Guo B, Zhuang Z, Pan JS, Chu SC (2021) Optimal design and simulation for PID controller using fractional-order fish migration optimization algorithm. IEEE Access 9:8808–8819. https://doi.org/10.1109/ACCESS.2021.3049421
Iqbal J, Ullah M, Khan SG, Cukovic BKS (2017) Nonlinear control systems—a brief overview of historical and recent advances. Nonlinear Eng 6:301–312. https://doi.org/10.1515/nleng-2016-0077
Jayaswal K, Palwalia DK, Kumar S (2021) Performance investigation of PID controller in trajectory control of two-link robotic manipulator in medical robots. J Interdisc Math 24:467–478. https://doi.org/10.1080/09720502.2021.1893444
Khan IA, Alghamdi AS, Jumani TA, Alamgir A, Awan AB, Khidrani A (2019) Salp swarm optimization algorithm-based fractional order PID controller for dynamic response and stability enhancement of an automatic voltage regulator system. Electronics 8:1472. https://doi.org/10.3390/electronics8121472
Khanduja N, Bhushan B (2019) CSTR control using IMC-PID, PSO-PID, and hybrid BBO-FF-PID controller. In: Applications of artificial Intelligence techniques in Engineering 2019. Springer, Singapore. https://doi.org/10.1007/978-981-13-1822-1_48
MATLAB optimization toolbox, the MathWorks, Inc., Natick, MA, USA
Noordin A, Basri MA, Mohamed Z, Lazim IM (2021) Adaptive PID controller using sliding mode control approaches for quadrotor UAV attitude and position stabilization. Arab J Sci Eng 46:963–981. https://doi.org/10.1007/s13369-020-04742-w
Pongfai J, Angeli C, Shi P, Su X, Assawinchaichote W (2021) Optimal PID controller autotuning design for MIMO nonlinear systems based on the adaptive SLP algorithm. Int J Control Autom Syst 1:392–403. https://doi.org/10.1007/s12555-019-0680-6
Precup RE, Teban TA, Albu A, Borlea AB, Zamfirache IA, Petriu EM (2020) Evolving fuzzy models for prosthetic hand myoelectric-based control. IEEE Trans Instr Measur 69. https://doi.org/10.1109/TIM.2020.2983531
Priyanka EB, Maheswari C, Thangavel S, Bala MP (2020) Integrating IoT with LQR-PID controller for online surveillance and control of flow and pressure in fluid transportation system. J Ind Inf Integr 1. https://doi.org/10.1016/j.jii.2020.100127
Rajesh KS, Dash SS (2019) Load frequency control of autonomous power system using adaptive fuzzy based PID controller optimized on improved sine cosine algorithm. J Ambient Intell Humaniz Comput 10:2361–2373. https://doi.org/10.1007/s12652-018-0834-z
Salman GA, Jafar AS (2019) Application of artificial intelligence techniques for LFC and AVR systems using PID controller. Int J Power Electron Drive Syst 10:1694. https://doi.org/10.11591/ijpeds.v10.i3.1694-1704
Swarnkar P, Goud H (2020) Design of fuzzy adaptive pi controller for inherently unstable system. SSRN 3623747
Swarnkar P, Goud H (2021) Design and tuning of PID controller for an inherently unstable system. In: Smart computing. https://doi.org/10.1201/9781003167488
Zarei M (2020) A physically based PID controller for the power maneuvering of nuclear reactors. Prog Nucl Energy 1. https://doi.org/10.1016/j.pnucene.2020.103431
Author information
Authors and Affiliations
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this chapter

Cite this chapter
Swarnkar, P., Goud, H. (2022). A Recursive PID Tuning Approach for the Inherently Unstable System. In: Bohre, A.K., Chaturvedi, P., Kolhe, M.L., Singh, S.N. (eds) Planning of Hybrid Renewable Energy Systems, Electric Vehicles and Microgrid. Energy Systems in Electrical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-19-0979-5_22
Download citation
DOI: https://doi.org/10.1007/978-981-19-0979-5_22
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-19-0978-8
Online ISBN: 978-981-19-0979-5
eBook Packages: EnergyEnergy (R0)