
Abstract
Increasing demand for a lighter and more durable material with sensing and actuation functionality, Magnetic Shape Memory Alloys (MSMA) are promising members, among many other smart materials. This study investigates the Magneto-Thermo-Mechanical (MTM) behavior of MSMA through a 3D phenomenological constitutive modeling thermodynamically consistent way. A specific Helmholtz free energy function is considered after identifying the external and internal state variables. The evolution equations of the internal state variables are defined by proposing a transformation function. The model parameters are calibrated through different MTM loading conditions. Selective model simulations demonstrate the magnetic field coupling with the actuation strain.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Magnetic shape memory alloys (MSMA) are one of the most emerging classes of multi-functional materials which respond to the magnetic field, temperature, and external load [1,2,3,4]. It has the potential to produce large Magnetic-Field-Induced Strain (MFIS) through microstructural changes at least one order of higher magnitude than those of available magnetostrictive materials [5,6,7,8,9]. MSMAs also exhibit conventional pseudo-elastic and shape memory behavior. However, MSMAs have advantages on actuation frequency (1KHz) over conventional SMAs due to the availability of high frequency applied magnetic field [10].
The macroscopic responses of MSMAs are the manifestations of four fundamental microscopic mechanisms: the motion of magnetic domain walls, the rotation of magnetization vector, field-induced variant reorientation, and field induced phase transformation [11, 12]. Ni-Mn-Ga alloys are the most widely investigated MSMAs for variant reorientation. Martensitic transformation in Ni2MnGa alloys was firstly reported by Webster et al. [13]. The detailed studies on the crystal structure of MSMAs were done by Zasimchuk et al. [14]. Ullako et al. [15] reported the first magnetic controlled shape memory effect in MSMAs. They observed 0.2% magnetic-field-induced strain (MFIS) in a stress-free experiment. NiCoMnIn alloys also exhibit MFIS under applied magnetic field. Such type of MFIS is caused by Field Induced Phase Transformation (FIPT) [16,17,18].
In this work, we develop a coupled constitutive equation of MSMAs for FIPT. The microstructure dependence is approximated phenomenologically by the evolution equations of the selected internal state variables. The model parameters are calibrated from the experimental data. Finally, MTM responses are simulated for FIPT.
2 Mechanism of Field-Induced Phase Transformation
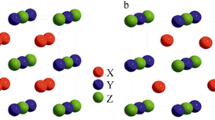
FIPT mechanism is similar to the temperature-induced phase transformation in conventional Shape Memory Alloys (SMAs). The Zeeman Energy (ZE)Footnote 1, which depends on the difference between saturation magnetizations of austenitic and martensitic phase, is converted to mechanical energy through FIPT [19,20,21]. The higher symmetric austenitic phase is ferromagnetic [22,23,24]. The anti-ferromagnetic martensitic phase has three possible variants of the tetragonal crystalline structure, which is depicted in Fig.1. The specimen is in the austenitic phase at room temperature and at a high magnetic field. After removing the applied field, the phase is transformed into the martensitic phase.
3 Constitutive Modeling
A multiplicative decomposition of deformation gradient \(\boldsymbol{F}\) into lattice \(\boldsymbol{F}_l\) and inelastic part \(\boldsymbol{F}_\iota \) is considered [25, 26] such that
The selection of an appropriate free energy function is one of the significant challenges for modeling multi-functional material. The function should be proposed in such a way so that the constitutive responses should be able to capture all the significant features of MSMA like phase transformation, and its temperature dependence. We propose a Helmholtz free energy density \(\tilde{\psi }\) per reference volume, containing a lattice energy \(\tilde{\psi }_l\), an inelastic energy \(\tilde{\psi }_\iota \), and a mixing energy \(\tilde{\psi }_{mix}\) as [27,28,29,30]
and we obtain the constitutive equations using Coleman-Noll [31] procedure :
The lattice right Cauchy green tensor \(\boldsymbol{C}_l = \boldsymbol{F}^T_l\boldsymbol{F}_l\), magnetic field strength \(\boldsymbol{H}\), and temperature \(\theta \) are the physical or external state variables for the constitutive equations. Further, \(\boldsymbol{C}_\iota \) and the martensitic volume fraction \(\xi \) are the internal state variables. Moreover, \(\boldsymbol{S}\) is the Second Piola-Kirchhoff stress, \(\eta \) is the entropy, and \(\boldsymbol{M}\) is the magnetization.

Crystalline structure of austenitic phase (A) and martensitic phase (M). M1 is variant-1, M2 is variant-2, and M3 is variant-3
4 Numerical Implementation and Model Calibration
For the small strain assumption, multiplicative decomposition becomes additive decomposition of strain with a lattice and an inelastic part
The lattice strain could further be decomposed into an elastic and a thermal strain, i.e., \(\boldsymbol{\varepsilon }_l = \boldsymbol{\varepsilon }_e + \boldsymbol{\varepsilon }_\theta \). We discard the thermal expansion and write \(\boldsymbol{\varepsilon }_l = \boldsymbol{\varepsilon }_e\). Moreover, for FIPT, the inelastic strain becomes transformation strain, i.e., \(\boldsymbol{\varepsilon }_\iota = \boldsymbol{\varepsilon }_t \). After identifying the internal state variable \(\left( \xi , \boldsymbol{\varepsilon }_t \right) \) and external state variables \(\left( \boldsymbol{\varepsilon }_e, \theta , \boldsymbol{H}\right) \), the explicit form of Helmholtz free energy function [32] is given by
where, \(\boldsymbol{L}\), \(u_0\), \(\eta _0\), c, and \(\boldsymbol{M}\) are the stiffness tensor, internal energy, entropy, specific heat, and saturation magnetization, respectively. The effective material properties are determined by using the rule of mixture. \(f\left( \xi \right) \) is the hardening function during forward and reverse phase transformation. We used the polynomial type hardening function [33],
where A, B, C, D represent model parameters. Moreover, \(n_1, n_2, n_3\) and \(n_4\) are hardening exponents for phase transformation. Considering the explicit form of (3), we write by using Coleman-Noll procedure
The constitutive equations then take the following forms:
and the residual inequality reads
We further consider the flow rule of the transformation strain
Expanding the entropy inequality equation (5), we finally obtain
where, \(\pi = \boldsymbol{\sigma }:\boldsymbol{\varLambda } -\rho \frac{\partial \psi }{\partial \xi }\dot{\xi }\ge 0 \) is the thermodynamics driving force.
4.1 1-D Reduction of the Model
We represent the 1-D result by assuming the uniaxial loading in a prismatic bar along its longitudinal axis. The stress tensor has only one non-zero component, that is
The one dimensional form of thermodynamic driving force reduces to
We now introduce the following transformation function
where Y is a positive scalar associated with the internal dissipation during the microstructure evolution [33]. The constraint on the evolution of the martensitic volume fraction can be expressed in terms of so-called Kuhn-Tucker conditions for both forward and reverse phase transformations as [34]
The material parameters required for model calibration can be found out directly from the experiments, and the values are given in Table 1. The hardening parameters, A, B, C, D, and Y are calibrated from the following end conditions
Figure 2a represents the phase transformation between stress and magnetic field plane at a specified temperature. The red curve demonstrates the forward phase transformation, and the blue curve is for the reverse phase transformation. The transformation magnetic field increases with an increase in applied load. With a uniaxial tensile load at stress level (\(\sigma = 100\) MPa), the new transformation magnetic fields are represented as \(M_{Hf}, M_{Hs}, A_{Hs}\), and \(A_{Hf}\) as the martensitic finish, martensitic start, austenitic start, and austenitic finish magnetic field, respectively. On the other hand, Fig. 2b represents the phase transformation in the stress and temperature field plane at the specified magnetic field.
Figure 3a represents the model simulation of the magnetic field induced strain at constant stress (\(\sigma = -1 \) MPa) in an isothermal environment. The material is initially in the martensitic phase. The initial strain and magnetic field are zero. When we increase the magnetic field up to \(A_{Hs}\), there is negligible change in the strain. As the magnetic field increases from \(A_{Hs}\) to \(A_{Hf}\), strain increases due to the magnetic-field-induced phase transformation. The anti-ferromagnetic martensite is transformed into the ferromagnetic austenite in this regime. Similarly, the austenite transforms to martensite during the unloading process. The phase transformation starts at magnetic flux \(M_{Hs}\) and ends when it reaches \(M_{Hf}\). The hysteresis effects are captured both in mechanical as well as magnetization constitutive response. Figure 3b represents the model prediction of magnetization response at constant stress (\(\sigma = -1\) MPa).

a Phase transformation diagram in \(\sigma _{11}-\mu _0 H\) plane at (\(\theta = 200\) K). b Phase Transformation diagram in the \(\sigma _{11}-\theta \) plane at (\(\mu _0 H = 13\) T)

a Model response for strain-field response at \((\sigma = -1\) MPa). b Model prediction of magnetization response at \((\sigma = -1\) MPa)
5 Conclusion
This work proposes the magneto-thermo-mechanical coupled model for MSMAs. The magneto-thermo-mechanical constitutive equations are derived from a proposed Helmholtz free energy function in a consistent thermodynamic way. The hysteretic behaviors of such materials are taking into account through evolution equations of internal variables. We did not verify our results to any experimental data yet. However, our main objective is to capture qualitatively memory effect of such material system. Model predictions capture the hysteresis effects, both for the mechanical and magnetic responses.
Notes
- 1.
Energy of magnetized body in an external applied magnetic field
References
Hobza A, Patrick CL, Ullakko K, Rafla N, Lindquist P, Müllner P (2018) Sensing strain with Ni-Mn-Ga. Sens Actuators A, Phys 269:137–144. https://doi.org/10.1109/ACCESS.2020.3020647
Heczko O, Straka L, Ullakko K (2003) Relation between structure, magnetization process and magnetic shape memory effect of various martensites occurring in Ni-Mn-Ga alloys. In: Journal de Physique IV (Proceedings), vol 112, EDP sciences, pp 959-962
O’Handley RC, Murray SJ, Marioni M, Nembach H, Allen SM (2000) Phenomenology of giant magnetic-field-induced strain in ferromagnetic shapememory materials (invited). J Appl Phys 87(2):4712-4717
Murray SJ, Marioni M, Tello PG, Allen SM, O’Handley RC (2001) Giant magnetic-field-induced strain in Ni-Mn-Ga crystals: experimental results and modeling. J Magn Magn Mater 226:945–947
Yamamoto T, Taya M, Sutou Y, Liang Y, Wada T, Sorensen L (2004) Magnetic field-induced reversible variant rearrangement in Fe–Pd single crystals. 52(17):5083–5091. https://doi.org/10.1016/0022-2836(81)90087-5
Müllner P, Murray SJ, et al (2001) Giant magnetic-field-induced strain in Ni–Mn–Ga crystals: experimental results and modeling. J Magn Magn Mater 226:945-947
Shield TW (2003) Magnetomechanical testing machine for ferromagnetic shape-memory alloys. Rev Sci Instrum 74(9):4077–4088
Likhachev AA, Sozinov A, Ullakko K (2004) Different modeling concepts of magnetic shape memory and their comparison with some experimental results obtained in Ni-Mn-Ga. Mater Sci Eng: A 378(1–2):513–518
Ullakko K, Huang JK, Kantner C, O’Handley RC (1966) Large magnetic-field-induced strains in Ni2MnGa single crystals. Appl Phys Lett 69:1966. https://doi.org/10.1063/1.117637
Tellinen J, Suorsa I, Jääskeläinen A, Aaltio I, Ullakko K (2002) Basic properties of magnetic shape memory actuators. In: 8th International conference ACTUATOR. pp 566–569
Kittel C, McEuen P, McEuen P (1996) Introduction to solid state physics (vol 8, pp 105-130). New York: Wiley
Faraji M, Yamini Y, Rezaee M (2010) Magnetic nanoparticles: synthesis, stabilization, functionalization, characterization, and applications. J Iran Chem Soc 7(1):1–37
Webster PJ, Ziebeck KR, Town SL, Peak MS (1984) Magnetic order and phase transformation in Ni2MnGa. Phil Mag B 49(3):295–310
Zasimchuk IK, Kokorin VV, Martynov VV, Tkachenko AV, Chernenko VA (1990) Crystal structure of martensite in Heusler alloy Ni2MnGa. Phys Met Metall 69(6):104–108
Ullakko K, Huang JK, Kantner C, O’handley RC, Kokorin VV (1996) Large magnetic-field-induced strains in Ni2MnGa single crystals. Appl Phys Lett 23 69(13):1966-1968
Sarawate N, Dapino M (2006) Experimental characterization of the sensor effect in ferromagnetic shape memory Ni-Mn-Ga. Appl Phys Lett 88(12):121923
Spaldin NA (2010) Magnetic materials: fundamentals and applications. Cambridge university press
Kainuma R, Imano Y, Ito W, Sutou Y, Morito H, Okamoto S, Kitakami O, Oikawa K, Fujita A, Kanomata T, Ishida K (2006) Magnetic-field-induced shape recovery by reverse phase transformation. Nature 439(7079):957–960
Kiefer B, Karaca HE, Lagoudas DC, Karaman I (2007) Characterization and modeling of the magnetic field-induced strain and work output in Ni2MnGa magnetic shape memory alloys. J Magn Magn Mater 312(1):164–175
Haldar K, Lagoudas DC, Karaman I (2014) Magnetic field-induced martensitic phase transformation in magnetic shape memory alloys: modeling and experiments. J Mech Phys Solids 1(69):33–66
Haldar K, Chatzigeorgiou G, Lagoudas DC (2015) Single crystal anisotropy and coupled stability analysis for variant reorientation in Magnetic Shape Memory Alloys. Eur J Mech A/Solids 1(54):53–73
Karaca HE, Karaman I, Basaran B, Ren Y, Chumlyakov YI, Maier HJ (2009) Magnetic field-induced phase transformation in NiMnCoIn magnetic shape-memory alloys-a new actuation mechanism with large work output. Adv Funct Mater 19(7):983–998
Karaca HE, Karaman I, Basaran B, Lagoudas DC, Chumlyakov YI, Maier HJ (2007) On the stress-assisted magnetic-field-induced phase transformation in Ni2MnGa ferromagnetic shape memory alloys. Acta Materialia 55(13):4253–4269
Karaca HE, Karaman I, Basaran B, Chumlyakov YI, Maier HJ (2006) Magnetic field and stress induced martensite reorientation in NiMnGa ferromagnetic shape memory alloy single crystals. Acta Materialia 54(1):233–245
Lee EH, Liu DT (1967) Finite-strain elastic-plastic theory with application to plane-wave analysis. J Appl Phys 38(1):19–27
Mandel J (1973) Thermodynamics and plasticity. In: Foundations of continuum thermodynamics. (pp 283-304). Palgrave, London
Lagoudas DC, Haldar K, Basaran B, Karaman I (2009) Constitutive modeling of magnetic field-induced phase transformation in NiMnCoIn magnetic shape memory alloys. In: Smart Materials, Adaptive Structures and Intelligent Systems. (vol 48968, pp 317-324)
Qidwai MA, Lagoudas DC (2000) Numerical implementation of a shape memory alloy thermomechanical constitutive model using return mapping algorithms. Int J Numer Methods Eng 47(6):1123–1168
Kiefer B, Lagoudas DC (2009) Modeling the coupled strain and magnetization response of magnetic shape memory alloys under magnetomechanical loading. J Intell Mater Syst Struct 20(2):143–170
Hirsinger L, Lexcellent C (2003) Modelling detwinning of martensite platelets under magnetic and (or) stress actions on Ni-Mn-Ga alloys. J Magn Magn Mater 1(254):275–277
Hütter G (2020) Coleman-Noll procedure for classical and generalized continuum theories. Encycl Continuum Mech 2020:316-323
Leclercq S, Lexcellent C (1996) A general macroscopic description of the thermomechanical behavior of shape memory alloys. J Mech Phys Solids 44(6):953–980
Boyd JG, Lagoudas DC (1996) A thermodynamical constitutive model for shape memory materials. Part I. The monolithic shape memory alloy. Int J Plast 12(6):805-842
Hanson MA (1981) On sufficiency of the Kuhn-Tucker conditions. J Math Anal Appl 80(2):545-550
Acknowledgements
The financial support (Seed Grant No. Spons/AE/10001729-5/2018 and Seed TAP Grant No. Spons/AE/10001729-6/2018) provided by the IIT BOMBAY & IRCC during this work is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Kumar, A., Haldar, K. (2022). Magnetic Shape Memory Alloys: Phenomenological Constitutive Modeling and Analysis. In: Jonnalagadda, K., Alankar, A., Balila, N.J., Bhandakkar, T. (eds) Advances in Structural Integrity. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-16-8724-2_18
Download citation
DOI: https://doi.org/10.1007/978-981-16-8724-2_18
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-8723-5
Online ISBN: 978-981-16-8724-2
eBook Packages: EngineeringEngineering (R0)