
Abstract
Viscoplastic deformation in multi-walled carbon nanotubes reinforced polypropylene nanocomposite films is investigated in the nonlinear creep regime. Isothermal creep and recovery strain experiments are conducted at a constant intermediate stress level of 10 MPa. The unrecovered strains at end of the recovery period are compared with those predicted from Schapery and Zapas–Crissman’s nonlinear viscoelastic–viscoplastic solid model and the effect of nonlinear functions characterizing deformation is studied. The prediction of permanent deformation was found comparable with the evidence from the dynamic mechanical thermal analysis. 2% and 1% nanocomposite samples were found with lower viscoplastic deformation at \(25\,^\circ \)C and \(50\,^\circ \)C respectively.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Polypropylene (PP) is a widely used thermoplastic polymer in aerospace applications due to its strength, low cost, low weight, ease of formability and fatigue resistant properties. Its semi-crystalline state provides both strength and flexibility [1, 2]. Studies showed that thermoplastic matrix when reinforced with these high strength nanotubes increases the deformation resistance of the materials, provided the nanofillers are well dispersed in base matrix [3, 4]. However, at higher MWCNT concentrations, MWCNTs are self-assembled in form of agglomeration due to high Van der Waals attraction which hinders stress transfer efficiency from matrix to fibre [5, 6]. Functionalized multi-walled carbon nanotubes (MWCNT) significantly enhance mechanical properties of PP nanocomposites and make them potential candidate for aerospace applications such as flexible flapping wings in micro air vehicles [7, 8] and low temperature proton exchange membrane fuel cells [9,10,11]. In bioinspired flapping wing applications, the damping caused by the viscoelastic stresses can reduce the amplitude of oscillations [12]. Flapping wings simulation studies also suggest that the biomimicked wing skin should be modelled using nonlinear constitutive relations since the elastic properties would be inadequate [13]. To study the viscoelastic behaviour in nanocomposites, the creep and relaxation-based experiments are most preferred. The samples are loaded with constant stresses and strains and allowed to recover for longer times as shown in Fig. 1. Material nonlinearity in MWCNT reinforced polymers encourages the investigation of deformation under variable stress and temperature loading through experiments and nonlinear viscoelastic modelling. Jia et al. [14] studied the creep and recovery behaviour of MWCNT-PP composites at low stress levels in the linear viscoelastic region and found a reduction in creep strain and unrecovered strain in MWCNT reinforced samples. Schapery modelled the creep behaviour in polymers using a nonlinear viscoelastic formulation based on the law of irreversible thermodynamics [15,16,17]. The strains in creep and recovery were expressed using the integral form of prony series including the nonlinear terms. Estimation of permanent deformation in form of unrecovered strains has been reported in a few studies [18,19,20,21] which indicate that the permanent deformation is significantly attributed to the applied stress, loading time and temperature and was evaluated in terms of long-term compliance [22]. In our earlier studies, nanocomposites were observed with low creep strain and lower viscoplastic strains at the end of recovery [23]. However, the analysis of permanent deformation is further substantial at high stress loading since the viscoplastic strains exist with the viscoelastic strains once the elastic strains are fully developed [18]. Although the unrecovered strains at the end of experiments could be initially assumed as viscoplastic strains, the nonlinear functions affecting permanent deformation should also be analysed. Furthermore, there is a paucity of information on the creep and recovery behaviour of -COOH functionalized MWCNT-PP nanocomposites.

Stress input and strain output response in creep test
The present investigation elucidates the effect of functionalized carbon nanotubes (MWCNT-COOH) and temperature on dynamic creep and recovery strain in nanocomposites through experiments and nonlinear viscoelastic modelling. The solution casting method is used for the development of thin nanocomposite films using PP in pellet form and –COOH functionalized multi-walled carbon nanotubes with varying MWCNT concentrations. Temperature-controlled dynamic creep and recovery experiments were performed at a constant 10 MPa creep stress in a dynamic mechanical analyser (DMA). Experiments reveal that the temperature-activated deformation is controlled by incorporating MWCNTs up to 1% volume fraction. Schapery’s nonlinear viscoelastic model coupled with Zapas–Crissman’s viscoplastic model is incorporated to study the development of unrecoverable viscoplastic strains predicted in experiments. The model prediction agrees with experimental findings. The present study recommends 1% MWCNT-COOH-PP nanocomposites for biomimicking of flapping wings in MAVs and NAVs.
2 Modelling for Permanent Strain in Nanocomposites
2.1 Nonlinear Viscoelastic–Viscoplastic Model
Nonlinear viscoelasticity in polymers and nanocomposite materials was initially modelled by Schapery based on creep and recovery observations. Time-dependent strains developed due to constant stress loading were modelled separately for creep and recovery steps. Total creep strain developed in materials includes elastic, viscoelastic and viscoplastic strains as shown in Eqs. 1 and 2 [15,16,17, 24]. The recoverable instantaneous strains are represented in the first term of Eq. 1 and are the functions of applied stress and instantaneous compliance. The second term represents the viscoelastic strains and is modelled using Prony series with a transient component of creep compliance.
where \(\epsilon _{c}\) is the creep strain, \(\epsilon _{r}\) is the recovery strain, \(D_{i}\) is the transient creep compliance, \(\sigma \) is the constant applied stress, \(a_\sigma \) is the stress-dependent horizontal shift factor, \(t_1\) is the creep loading time and \(\epsilon _{vp}(t,\sigma )\) is the viscoplastic strain developed during creep loading.
The nonlinear stress-based functions \(g_{0}\), \(g_{1}\), \(g_{2}\) and \(a_{\sigma }\) are introduced in strain formulation. These functions represent the extent of elastic and viscoelastic behaviour of the material in form of instantaneous and transient creep compliance. At high stress loading, the transient compliance is investigated since the induced deformations are due to the loading in the nonlinear regime. The effect of transient compliance on deformation is expressed by \(g_{2}\) term. The strain expressions are later coupled with Zapas–Crissman’s viscoplastic term shown in Eq. 3 for the long-term creep loading and order of magnitude higher recovery periods.
The viscoplastic strain is represented in a nonlinear functional form. The expression is normalized for unit retardation time \(\tau \) and constant stress loading. The parameter n is obtained from linear creep data while C and M are evaluated from nonlinear least square fitting [25].
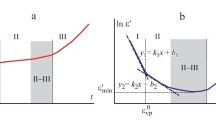
2.2 Estimation of Stress-Dependent Functions
The Levenberg–Marquardt nonlinear least square curve fitting algorithm was implemented to obtain the nonlinear functions from viscoelastic and viscoplastic model [26]. Root mean square error was considered as the objective function to be minimized. Prony series parameters obtained from the linear creep data were used to evaluate \(g_{2}\), \(a_{\sigma }\) from recovery data and \(g_{0}\), \(g_{1}\) from creep data consecutively.
3 Experimental
3.1 Nanocomposite Films
We adopted the conventional solvent casting method and modified it for functionalized fillers in our earlier studies [4]. Isotactic polypropylene procured from Otto chemicals Pvt. Ltd. and -COOH functionalized MWCNTs from Nanoshel Pvt. Ltd. were processed for nanocomposite film development. 0.5%, 1% and 2% volume fraction of functionalized carbon nanotubes were sonicated with xylene solvent in an ice bath environment using ultrasonicator. The idea behind ultrasonication was to uniformly disperse nanotubes in the organic solvent. Later on, the polypropylene pellets were added to the sonicated solution by a heat treatment process in a condensation atmosphere. The solution was heated up to 23 min with simultaneous stirring. The solution was then poured in a preheated petri-dish kept in an environmental chamber at \(180\,^\circ \)C for 2 h followed by a secondary heat treatment stage at \(140\,^\circ \)C for one hour. The developed nanocomposite film was peeled off from the petri-dish. Our film development procedure was slightly different from the procedure adopted in our earlier studies where the functionalized fillers and matrix were processed separately with the xylene solvent before heating [23].
3.2 Isothermal Creep Loading
Figure 2 shows the loading of samples in dynamic mechanical analyser (MetraVib 100\(+\)). Neat PP and the nanocomposite samples were creep loaded at a constant stress of 10 MPa and at \(25\,^\circ \)C and \(50\,^\circ \)C. The loading stress was approximately half of the strength of the nanocomposites as reported in our earlier studies [4]. The loading was applied for 300 s followed by a recovery period of half an hour. The samples were allowed to recover up to six times more than the loading time. The idea behind the long recovery time was to investigate the traces of permanent creep deformation in form of viscoplastic strains in nanocomposites.

Creep testing in dynamic mechanical analyser
3.3 Estimation of Viscoplastic Strains
The unrecovered strains at the end of experiments were assumed as an initial guess of permanent deformation in the nanocomposites. To further investigate the existence of viscoplastic strains, the nonlinear viscoelastic–viscoplastic model was fitted to the experimental observations by implementing a nonlinear least square curve fitting algorithm developed in MATLAB. The viscoplastic strains were predicted from the model and compared with experimental findings. The nonlinearity parameters both from the viscoelastic and viscoplastic models were obtained.
4 Results and Discussions
4.1 Temperature Effects
Figure 3 represents the experimental creep and recovery stages for neat PP and nanocomposite samples at \(25\,^\circ \)C and \(50\,^\circ \)C. It is evident that MWCNT reinforced samples develop lower creep strain than the neat sample up to 1% concentration. At \(25\,^\circ \)C, 1% samples were observed with 45.2% reduction in creep strain. Reinforcing effectiveness of MWCNTs was significantly observed at \(50\,^\circ \)C with 9.85% and 47.86% reduction in creep strain for 0.5% and 1% sample. Though MWCNT reinforced samples are observed in reducing the creep strain, 2% sample showed a rise in creep strain than other considered samples. It represented 8.39% and 3.73% increase in strain than the neat sample.

Experimental Creep and recovery stages a \(25\,^\circ \)C and b \(50\,^\circ \)C
In spite of the efficient reduction in creep strains due to MWCNT loading, the samples were observed with a higher increase in creep strain at \(50\,^\circ \)C. High creep strains induce permanent deformation in material and hence estimation of viscoplastic strains is essential. The unrecovered strain from experiments was reported lowest for 2% sample at \(25\,^\circ \)C. This could possibly be due to the presence of MWCNT clusters due to improper dispersion [23]. However, at \(50\,^\circ \)C, these aggregates could have lowered the deformation resistance than the well-dispersed MWCNTs in 1% sample, and hence the unrecovered strain was found minimum for 1% sample. These unrecovered strains could be assumed as permanent deformation in samples due to high stress creep and temperature loading.
4.2 Model Predictions
The experimental observations are further fitted with a nonlinear model with the viscoplastic strain term. We found experimental observations to be in good agreement with the model prediction by adding \(\epsilon _{vp}\) term. Figure 4 represents the model predictions for creep and recovery stages in nanocomposites. At \(25\,^\circ \)C, when the unrecovered strains are smaller, we observed disagreement between experimental data and model prediction for 0.5% sample. This could be influenced by the presence of random small MWCNT aggregates which could have increased the interface strength between aggregates and the PP matrix. Although this effect was completely vanished at \(50\,^\circ \)C. This indicates temperature-induced decrements in deformation resistance of samples and could have increased the unrecovered strains. The nonlinear model functions mentioned in Table 1 showed that nonlinear term \(g_{2}\) was significantly larger than the other nonlinear terms. This represents that the deformation is more likely influenced by the transient compliance. However, \(g_{2}\) in 1% sample was observed minimum which indicates temperature-induced structural stability in 1% sample than the neat PP and other nanocomposites.

Creep and recovery stages from model a \(25\,^\circ \)C and b \(50\,^\circ \)C
The evolution of \(g_{0}\), \(g_{1}\), \(g_{2}\) and \(a_{\sigma }\) is shown in Table 1. \(g_{0}\) indicates effect of stress and temperature on elastic compliance whereas \(g_{1}\), \(g_{2}\) and \(a_{\sigma }\) correspond to the effect on transient compliance [23]. It is evident that \(g_{0}\) was comparatively lower than other nonlinear terms which indicate the presence of viscoelastic strains. These increments in these nonlinear terms at \(50\,^\circ \)C indicate the dominance of viscoelastic and viscoplastic strains.
4.3 Permanent Strain
The prediction of permanent strains from the model and those obtained from experimental data is shown in Fig. 5. The viscoplastic strains are assumed to be developed during the creep stage. Therefore, the creep data was fitted to the viscoplastic model separately to obtain model functions. Table 2 indicates the functions produced. The model predictions agree well with experimental findings. The negative strain from the model prediction in 0.5% sample is very less (0.15%) compared to the stiffness of nanocomposite samples reported in our previous work [23]. This could be attributed to the small variation in strain near the end of the recovery period in 0.5% sample. This variation could be due to the dynamic displacement given during sinusoidal loading in experiments. Hence, more number of prony series terms can be considered in the nonlinear model fitting.

Permanent strain from experiments and model
5 Conclusion
MWCNT-PP nanocomposites were characterized for their creep and recovery behaviour at 10 MPa stress which was 50% of the strength of nanocomposites. Temperature-induced deformation was first observed from experimental observations in form of creep strain at the end of the creep stage and uncovered strain at the end of the recovery period. The strains were later predicted from the nonlinear viscoelastic–viscoplastic model. 1% MWCNT reinforced sample was found with up to 45.2% and 47.86% reduction in creep strain at \(25\,^\circ \)C and \(50\,^\circ \)C, respectively. Viscoplastic strains which were first assumed as unrecovered strain in experiments match well with model findings at both the test temperatures. 2% and 1% samples indicate lower viscoplastic strains at \(25\,^\circ \)C and \(50\,^\circ \)C, respectively, and the same observations were predicted by fitting the viscoplastic model with experimental creep data.
References
Bikiaris D (2010) Microstructure and properties of polypropylene carbon nanotube nanocomposites. Materials 3:2884–2946
Szpieg M, Giannadakis K, Varna J (2011) Time dependent nonlinear behavior of recycled polypropylene in high tensile stress loading. J Thermoplast Compos Mater 24:625–652
Li C, Pang XJ, Qu MJ, Jhang QT, Wang B, Zhang BL (2005) Fabrication and characterization of polycarbonate/carbon nanotubes composites. Composite Part A 37:1485–1489
Khare V, Srivastava S, Kamle S, Kamath GM (2019) Effect of filler functionalization on the thermomechanical behavior of polypropylene nanocomposites. Procedia Struct Integr 14:215–225
Chanteli A, Tserpes KI (2015) Finite element modeling of carbon nanotube agglomerates in polymers. Compos Struct 132
Pegel S, Potschke P, Villmow T, Stoyan D, Heinrich G (2009) Spatial statistics of carbon nanotube polymer composites. Polymer 5:2123–2132
Khare V, Kumar D, Kamle S (2020) Structural damage assessment of MAV flapping wings using DIC-wavelet technique. In: SPIE 2020, Anaheim, California, USA, April
Kumar D, Shandilya S, Khare V, Kamle S, Chiang CH (2020) Insect-inspired micro air vehicle with nanocomposite flapping wings and flexure joints. In: SPIE 2020, Anaheim, California, USA, April
Porzare K, Mansourpanah Y, Farhadi S (2016) Advanced nanocomposite membranes for fuel cell applications, a comprehensive review. Biofuel Res J 12:496–513
Ijeri V, Cappelletto L, Bianco S, Tortello M, Spinelli P, Tresso E (2010) Nafion and carbon nanotube nanocomposites for mixed proton and electron conduction. J Membr Sci 363:265–270
Thomassin JM, Colar J, Caldarella G, Germain A, Jerome R, Detrembleur C (2007) Beneficial effect of carbon nanotubes on the performances of nafion membranes in fuel cell applications. J Membr Sci 303:252–257
Buoso S, Palacios R (2016) Viscoelastic effects in the aeromechanics of actuated elastomeric membrane wings. J Fluids Struct
Lin T, Xia W, Hu S (2021) Effect of chordwise deformation on propulsive performance of flapping wings in forward flight. Aeronaut J. In: International symposium on smart aircraft 2019 collection
Jia Y, Peng K, Gong XL, Zhang Z (2011) Creep and recovery of polypropylene/carbon nanotube composites. Int J Plast 27:1239–1251
Schapery RA (2000) Nonlinear viscoelastic solids. Int J Solids Struct 37:359–366
Schapery RA (1966) A theory of nonlinear thermoviscoelasticity based on irreversible thermodynamics. In: 5th national congress of applied mechanics
Schapery RA (1969) On the characterization of nonlinear viscoelastic materials. Polym Eng Sci 295
Zapas LJ, Crissman JM (1984) Creep and recovery behavior of ultra high molecular weight polyethylene in the region of small uniaxial deformations. Polymer 25(1):57–62
Roylance D (2001) Engineering viscoelasticity. Mechanics of materials course, MIT3 11F99 visco
Christensen RM (1982) Theory of viscoelasticity, 2nd edn. Academic, New York
Papanicolaou GC, Zaoutsos SP (2011) Viscoelastic constitutive modeling of creep and stress relaxation in polymers and polymer matrix composites. Woodhead, Sawston
Tuttle ME, Brinson HF (1985) Prediction of the long term creep compliance of general composite laminates. Exp Mech
Khare V, Kamle S (2020) Effect of temperature and filler volume fraction on the creep and recovery behaviour of MWCNT-COOH-reinforced polypropylene films. Arch Appl Mech (In press)
Schapery RA (1966) An engineering theory of nonlinear viscoelasticity with applications. Int J Solid Struct 2:407
Pasricha A, Dillard DA, Tuttle ME (1997) Effect of physical aging and variable stress history on the strain response of polymeric composites. Compos Sci Technol 57(9–10):1271–1279
Lourakis M (2008) Levenberg-Marquardt nonlinear least squares algorithms in c/c\(++\). Technical report, http://users.ics.forth.gr/lourakis/levmar/
Acknowledgements
The authors express their sincere gratitude to the Advanced Materials and Structures Laboratory for providing the dynamic mechanical testing facility (DMA 100\(+\)). The financial support from MHRD New Delhi in form of a research fellowship is highly appreciated.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2022 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Khare, V., Kamle, S. (2022). Dynamic Creep Response of MWCNT-COOH-PP Nanocomposites. In: Jonnalagadda, K., Alankar, A., Balila, N.J., Bhandakkar, T. (eds) Advances in Structural Integrity. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-16-8724-2_15
Download citation
DOI: https://doi.org/10.1007/978-981-16-8724-2_15
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-16-8723-5
Online ISBN: 978-981-16-8724-2
eBook Packages: EngineeringEngineering (R0)